JP4620364B2 - 駆動および感知プレートを有する分離された共振子ジャイロスコープ - Google Patents
駆動および感知プレートを有する分離された共振子ジャイロスコープ Download PDFInfo
- Publication number
- JP4620364B2 JP4620364B2 JP2004044947A JP2004044947A JP4620364B2 JP 4620364 B2 JP4620364 B2 JP 4620364B2 JP 2004044947 A JP2004044947 A JP 2004044947A JP 2004044947 A JP2004044947 A JP 2004044947A JP 4620364 B2 JP4620364 B2 JP 4620364B2
- Authority
- JP
- Japan
- Prior art keywords
- plate
- resonator
- proof mass
- base plate
- gyroscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5656—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/084—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass the mass being suspended at more than one of its sides, e.g. membrane-type suspension, so as to permit multi-axis movement of the mass
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49007—Indicating transducer
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
Description
一部継続出願は、米国特許法第120条に基づき、以下の同時係属であり、同一人に譲渡された米国実用特許出願の恩典を請求し、これは参照によりここに組み込まれている:
2001年8月10日に出願され、「分離された共振子ジャイロスコープ(ISOLATED RESONATEOR GYROSCOPE)」と題が付けられた米国特許出願第09/928,279号。
本発明は、政府によって与えられる政府サポートで行われた。政府は、この発明に特定の権利を有している。
すべての振動性ジャイロスコープは、第1のモード、すなわち、入力または駆動モードで、振動するように駆動される回転感知機械的部材を用いている。回転による部材のコリオリ加速度は、入力モードから第2のモード、すなわち、出力または感知モードへのエネルギー伝達を含む。第2のモードは、次に検出される感知部材に励起を生成する。振動性ジャイロスコープの最適な性能は、駆動および感知モードが同一の共振周波数および高いQファクタを有するときに得られる。コリオリ加速度に対する応答は、この場合、共振のQファクタによって機械的に増幅され、改良されたセンサ性能をもたらす。共振子感知モードの閉ループ制御(例えば、参照によりここに組み込まれる同時係属の米国特許出願第09/488,425号)は、コリオリ力−再バランス、感知モード減衰および広いジャイロスコープ帯域幅をもたらす。
図1は、本発明の反応のない共振子ジャイロスコープ100の実施形態の平面図を示す。このジャイロスコープ100は、ベースプレート106と、ポスト慣性プルーフ質量体102および均衡プレート104を有する独特の共振子124とを備えている。この均衡プレート104は、慣性プルーフ質量体102のそれにほぼ匹敵するロッキング慣性を有し、これら2つの本体は、上述されているように、相互に連結され相互に作用する。この均衡プレート104および中央のプルーフ質量体102は、4つの取り付けポイント126でベースプレート106に結合され、屈曲部108によって相互に連結されている。明細書を通して参照される重要な主要軸は、X軸110と、Y軸112と、Z軸114(これは、図1の欄外に方向付けられている)である。別の方法として、この均衡プレート104は、さらに、2つの本体(慣性プルーフ質量体102および均衡プレート104)が、前に記述されているように、相互に作用するかぎり、円形のリング、他の任意の形状などのあらゆる他の形状で設計されることが可能である。
前に記述されているように、本発明の実施形態は、関連技術(例えば、米国特許第5,894,090号)の「クローバ型」の代わりに、感知および駆動電極を保持するために、均衡プレートを利用している。
分離された共振子の多数の形状は、共振子屈曲部108のレイアウトを変えることによって可能である。本発明の異なる実施形態は、さらに、異なるパターンに配置される共振子屈曲部108を用いることが可能である。例えば、図1に示されるように、共振子屈曲部108は、プルーフ質量体102から均衡プレート104へ径方向に延在するように配置されている。他の実施形態において、屈曲部108は、さらに、プルーフ質量体102の周囲まわりに延在するように配置されることが可能である(そのうえ、プルーフ質量体102と均衡プレート104とを相互に連結する)。加えて、ハイブリッドは、さらに、径方向に延在するいくつかの屈曲部108に、周辺まわりに延在する他のものに可能である。
図3は、本発明の分離された共振子ジャイロスコープを製造する典型的な方法300のフローチャートである。この方法は、ブロック302において、プルーフ質量体102と、広範囲な平面領域を有する均衡プレート104と、プルーフ質量体102と均衡プレート104とを相互に連結する1つ以上の屈曲部108とを含む分離された共振子124を設けることを備えている。次に、ブロック304において、感知および駆動電極120が、ベースプレート106に固定される。ブロック306において、この方法300は、駆動および感知電極が均衡プレートの広範囲な平面領域に近接して配置されるように、1つ以上の屈曲部108によってベースプレート106に共振子124を固定することをさらに備え、この分離された共振子124は、該共振子124が励起されるとき、ベースプレート106への正味運動量を実質的に伝達しない。例えば、この共振子124は、導電性のドープ処理シリコンからエッチングされ、金−金熱圧縮接合、あるいは、金−シリコン共晶接合を使用して、堅固にかつ導電性にベースプレートに接合されることが可能である。
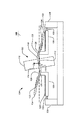
図4は、分離されたプレーナ共振子ジャイロスコープモデルの図を示す。前に詳述されているように、機械的アセンブリは、共振子124と、ベースプレート106とを備えている。この共振子124は、弾性ビーム屈曲部部材108によって平面な均衡プレート104とベースプレート106とに取り付けられる中央の慣性プルーフ質量体102の部材を備えている。この平面の均衡プレート104の慣性は、プルーフ質量体102のロッキング慣性にマッチする。この両方は、これらの慣性が形状設計によってほぼ等しく設定されることが可能なように、研磨加工された結晶シリコンから作られることが可能である。
本発明の好ましい実施形態の前述の記述は、例示および説明のために示されたものである。開示される精密な形状に本発明を包括し、あるいは、限定することを意図されるものでない。多数の変更および変形は、上記の教示を鑑みて可能である。本発明の範囲は、この詳細な説明によって限定されるのではなく、むしろ、ここに添付の特許請求の範囲によって限定されるということが意図される。上記の明細書、例示およびデータは、本発明の製造および用途の完全な説明を与えている。本発明の多くの実施形態は、本発明の範囲から逸脱することなく行われることが可能なので、本発明は、下文に添付されている特許請求の範囲にある。
Claims (28)
- 平面領域を有し、その中央部に孔が開いた均衡プレート、
前記均衡プレートの前記孔を貫通し、その質量中心が、前記均衡プレートの厚さ方向の中心と同じ平面になるような位置関係を有し、その質量の慣性分布が、前記孔内よりも孔外に大きい質量を有するように設計されたプルーフ質量体、
並びに
前記位置関係で前記プルーフ質量体と前記均衡プレートとを相互に連結した1つ以上の屈曲部、
を有する分離された共振子と、
前記プルーフ質量体が接続された部分と前記均衡プレートが接続された部分の間で前記1つ以上の屈曲部と接続されることによって前記共振子に固定されたベースプレートと、
前記共振子を励起し、ジャイロスコープの動きを感知するために、前記均衡プレートの平面領域に近接して前記ベースプレートに固定された駆動および感知電極と、
を具備する共振子ジャイロスコープであって、
前記感知電極は、前記均衡プレートの周辺まわりに配置され、前記感知電極の表面エリアは、前記駆動電極の表面エリアより大きく、
前記分離された共振子は、前記共振子が励振されるとき、前記ベースプレートへ前記共振子の垂直方向の振動を実質的に伝達しない、共振子ジャイロスコープ。 - 前記プルーフ質量体および均衡プレートは、それぞれ、実質的に一致する質量の中心と軸まわりで横方向に作用する慣性対称とを有し、前記プルーフ質量体および均衡プレートは、互いに、ほぼ等しい周波数で、前記軸に対して横方向に作用する振動の2つの差動ロッキングモードを形成する、請求項1に記載の共振子ジャイロスコープ。
- 少なくとも1つの分離屈曲部を介して前記ベースプレートに取り付けられた取り付けフレームをさらに具備する、請求項1に記載の共振子ジャイロスコープ。
- 前記ベースプレートは、剛性である、請求項1に記載の共振子ジャイロスコープ。
- 前記均衡プレートは、フレキシブルである、請求項1に記載の共振子ジャイロスコープ。
- 前記均衡プレートは、前記プルーフ質量体のロッキング慣性にほぼ匹敵するロッキング慣性を有している、請求項1に記載の共振子ジャイロスコープ。
- 前記1つ以上の屈曲部は、前記均衡プレートと一体化している、請求項1に記載の共振子ジャイロスコープ。
- 前記プルーフ質量体、均衡プレートおよびベースプレートは、シリコンから機械加工されて形成されている、請求項1に記載の共振子ジャイロスコープ。
- 前記1つ以上の屈曲部の各々は、第1の端部で前記プルーフ質量体に、第2の端部で前記均衡プレートに取り付けられているビーム屈曲部である、請求項1に記載の共振子ジャイロスコープ。
- 各ビーム屈曲部は、不均衡に前記ベースプレートに、前記均衡プレートへのアタッチメントポイントよりも前記プルーフ質量体へいっそう近くに取り付けられている、請求項9に記載の共振子ジャイロスコープ。
- 前記プルーフ質量体は、垂直部分を備えている、請求項1に記載の共振子ジャイロスコープ。
- 前記1つ以上の屈曲部は、前記中央のプレート部分と一体化している、請求項11に記載の共振子ジャイロスコープ。
- 前記中央のプレート部分、1つ以上の屈曲部および前記均衡プレートは、精密に研磨加工されたシリコンウエハを貫通エッチングすることによって形成されている、請求項11に記載の共振子ジャイロスコープ。
- 前記垂直部分は、前記中央のプレート部分に接合された独立した部材である、請求項11に記載の共振子ジャイロスコープ。
- 平面領域を有し、その中央部に孔が開いた均衡プレート、
前記均衡プレートの前記孔を貫通し、その質量中心が、前記均衡プレートの厚さ方向の中心と同じ平面になるような位置関係を有し、その質量の慣性分布が、前記孔内よりも孔外に大きい質量を有するように設計されたプルーフ質量体、
並びに
前記位置関係で前記プルーフ質量体と前記均衡プレートとを相互に連結した1つ以上の屈曲部、
を含む分離された共振子を設ける工程と、
ベースプレートに駆動および感知電極を、前記感知電極が前記均衡プレートの周辺まわりに配置され、前記感知電極の表面エリアが前記駆動電極の表面エリアより大きくなるように固定する工程と、
前記駆動および感知電極が前記均衡プレートの平面領域に近接して配置されるように、前記プルーフ質量体が接続された部分と前記均衡プレートが接続された部分の間でベースプレートを前記1つ以上の屈曲部に接続することによって、ベースプレートを前記共振子に固定する工程と、
を具備する共振子ジャイロスコープを製造する方法であって、
前記分離された共振子は、前記共振子が励振されるとき、前記ベースプレートへ前記共振子の垂直方向の振動を実質的に伝達しない、方法。 - 前記プルーフ質量体および均衡プレートは、各々、実質的に一致する質量の中心と軸まわりで横方向に作用する慣性対称とを有し、前記プルーフ質量体および均衡プレートは、互いに、ほぼ等しい周波数で、前記軸に対して横方向に作用する振動の2つの差動ロッキングモードを形成する、請求項15に記載の方法。
- 少なくとも1つの分離屈曲部を介して前記ベースプレートに取り付けられる取り付けフレームを設けることをさらに具備している、請求項15に記載の方法。
- 前記ベースプレートは剛性である、請求項15に記載の方法。
- 前記均衡プレートはフレキシブルである、請求項15に記載の方法。
- 前記均衡プレートは、前記プルーフ質量体のロッキング慣性にほぼ匹敵するロッキング慣性を有している、請求項15に記載の方法。
- 前記1つ以上の屈曲部は、前記均衡プレートと一体化して生成される、請求項15に記載の方法。
- 前記生成および固定する工程は、前記プルーフ質量体、均衡プレートおよびベースプレートをシリコンから機械加工することを備えている、請求項15に記載の方法。
- 前記1つ以上の屈曲部はそれぞれ、第1の端部で前記プルーフ質量体に、第2の端部で前記均衡プレートに取り付けられるビーム屈曲部である、請求項15に記載の方法。
- 各ビーム屈曲部が、不均衡に前記ベースプレートに、前記均衡プレートへのアタッチメントポイントよりも前記プルーフ質量体へいっそう近くに取り付けられている、請求項23に記載の方法。
- 前記プルーフ質量体は垂直部分を備えている、請求項15に記載の方法。
- 前記1つ以上の屈曲部は、前記中央のプレート部分と一体化している、請求項25に記載の方法。
- 前記中央のプレート部分、1つ以上の屈曲部および前記均衡プレートは、精密に研磨加工されたシリコンウエハを貫通エッチングすることによって生成される、請求項25に記載の方法。
- 前記垂直部分は、前記中央のプレート部分から独立した部材であり、前記プルーフ質量体を生成する工程は、前記中央のプレート部分に前記垂直部分を接合することを備えている、請求項25に記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/370,953 US7017410B2 (en) | 2001-08-10 | 2003-02-20 | Isolated resonator gyroscope with a drive and sense plate |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004251909A JP2004251909A (ja) | 2004-09-09 |
| JP2004251909A5 JP2004251909A5 (ja) | 2005-09-29 |
| JP4620364B2 true JP4620364B2 (ja) | 2011-01-26 |
Family
ID=32736451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004044947A Expired - Fee Related JP4620364B2 (ja) | 2003-02-20 | 2004-02-20 | 駆動および感知プレートを有する分離された共振子ジャイロスコープ |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US7017410B2 (ja) |
| EP (1) | EP1450131B1 (ja) |
| JP (1) | JP4620364B2 (ja) |
| DE (1) | DE602004032075D1 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6915215B2 (en) * | 2002-06-25 | 2005-07-05 | The Boeing Company | Integrated low power digital gyro control electronics |
| US7691723B2 (en) * | 2005-01-07 | 2010-04-06 | Honeywell International Inc. | Bonding system having stress control |
| US7818871B2 (en) | 2006-07-25 | 2010-10-26 | California Institute Of Technology | Disc resonator gyroscope fabrication process requiring no bonding alignment |
| JP4851555B2 (ja) * | 2008-05-13 | 2012-01-11 | 株式会社デンソー | 力学量センサおよびその製造方法 |
| US8039912B2 (en) * | 2008-06-25 | 2011-10-18 | Honeywell International Inc. | Systems and methods for reduced stress anchors |
| US8450913B1 (en) * | 2011-03-31 | 2013-05-28 | Georgia Tech Research Corporation | Tunable Piezoelectric MEMS Resonators suitable for real-time clock applications |
| US8960003B2 (en) * | 2011-09-16 | 2015-02-24 | Taiwan Semiconductor Manufacturing Company, Ltd. | Motion sensor device and methods for forming the same |
| EP2573516B1 (en) * | 2011-09-21 | 2013-11-20 | Tronics Microsystems S.A. | A micro-electromechanical gyro device |
| US8650955B2 (en) * | 2012-01-18 | 2014-02-18 | The United States Of America As Represented By The Secretary Of The Navy | Time domain switched gyroscope |
| CN102661744B (zh) * | 2012-05-31 | 2014-12-17 | 东南大学 | 硅基双平衡环动调陀螺转子体结构与加工方法 |
| KR101388814B1 (ko) | 2012-09-11 | 2014-04-23 | 삼성전기주식회사 | 각속도 센서 |
| JP6339669B2 (ja) | 2013-07-08 | 2018-06-06 | モーション・エンジン・インコーポレーテッド | Memsデバイスおよび製造する方法 |
| WO2015042700A1 (en) | 2013-09-24 | 2015-04-02 | Motion Engine Inc. | Mems components and method of wafer-level manufacturing thereof |
| KR101531093B1 (ko) * | 2013-07-31 | 2015-06-23 | 삼성전기주식회사 | 가속도 센서 및 각속도 센서 |
| WO2015013827A1 (en) | 2013-08-02 | 2015-02-05 | Motion Engine Inc. | Mems motion sensor for sub-resonance angular rate sensing |
| US20150168146A1 (en) * | 2013-12-13 | 2015-06-18 | Sensors In Motion | Planar accelerometer with internal radial sensing and actuation |
| WO2015103220A1 (en) * | 2013-12-30 | 2015-07-09 | Robert Bosch Gmbh | Robust inertial sensors |
| JP6590812B2 (ja) | 2014-01-09 | 2019-10-16 | モーション・エンジン・インコーポレーテッド | 集積memsシステム |
| US20170030788A1 (en) | 2014-04-10 | 2017-02-02 | Motion Engine Inc. | Mems pressure sensor |
| US11674803B2 (en) | 2014-06-02 | 2023-06-13 | Motion Engine, Inc. | Multi-mass MEMS motion sensor |
| CN104197919B (zh) * | 2014-08-08 | 2017-06-13 | 上海交通大学 | 上下贯通支撑的玻璃金属半球谐振微陀螺 |
| US11287486B2 (en) | 2014-12-09 | 2022-03-29 | Motion Engine, Inc. | 3D MEMS magnetometer and associated methods |
| CA3220839A1 (en) | 2015-01-15 | 2016-07-21 | Motion Engine Inc. | 3d mems device with hermetic cavity |
| US10278281B1 (en) | 2015-10-30 | 2019-04-30 | Garmin International, Inc. | MEMS stress isolation and stabilization system |
| US10352960B1 (en) | 2015-10-30 | 2019-07-16 | Garmin International, Inc. | Free mass MEMS accelerometer |
| US10551190B1 (en) | 2015-10-30 | 2020-02-04 | Garmin International, Inc. | Multi Coriolis structured gyroscope |
| US10794700B1 (en) | 2015-10-30 | 2020-10-06 | Garmin International, Inc. | Stress isolation of resonating gyroscopes |
| US10126128B2 (en) | 2016-05-26 | 2018-11-13 | Nxp Usa, Inc. | Angular rate sensor |
| JP2020030067A (ja) * | 2018-08-21 | 2020-02-27 | セイコーエプソン株式会社 | 物理量センサー、センサーデバイス、電子機器、および移動体 |
| CN109813853A (zh) * | 2019-03-16 | 2019-05-28 | 中国民用航空飞行学院 | 一种便携式泡沫灭火剂稳定性能检测仪 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08226931A (ja) * | 1995-02-21 | 1996-09-03 | Wako:Kk | 角速度センサ |
| JPH08285608A (ja) * | 1995-04-14 | 1996-11-01 | Miyota Kk | 角速度センサ |
| JPH09512904A (ja) * | 1994-03-08 | 1997-12-22 | ニューカーマンズ、アーモンド、ピー. | 一体化センサを備えたモノリシックシリコン・レートジャイロ |
| JPH10227644A (ja) * | 1997-02-12 | 1998-08-25 | Wako:Kk | 振動子を用いた角速度センサ |
| US6009751A (en) * | 1998-10-27 | 2000-01-04 | Ljung; Bo Hans Gunnar | Coriolis gyro sensor |
| US6367786B1 (en) * | 1999-06-07 | 2002-04-09 | California Institute Of Technology | Micromachined double resonator |
| JP2002350138A (ja) * | 2001-05-28 | 2002-12-04 | Wacoh Corp | 加速度と角速度との双方を検出する装置 |
| US20030029238A1 (en) * | 2001-08-10 | 2003-02-13 | The Boeing Company | Isolated resonator gyroscope |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US392650A (en) | 1888-11-13 | watrous | ||
| ES2056580T3 (es) | 1990-05-18 | 1994-10-01 | British Aerospace | Sensores inerciales. |
| US5203208A (en) * | 1991-04-29 | 1993-04-20 | The Charles Stark Draper Laboratory | Symmetrical micromechanical gyroscope |
| US5665915A (en) | 1992-03-25 | 1997-09-09 | Fuji Electric Co., Ltd. | Semiconductor capacitive acceleration sensor |
| US5646346A (en) | 1994-11-10 | 1997-07-08 | Okada; Kazuhiro | Multi-axial angular velocity sensor |
| US6044705A (en) | 1993-10-18 | 2000-04-04 | Xros, Inc. | Micromachined members coupled for relative rotation by torsion bars |
| DE4442033C2 (de) | 1994-11-25 | 1997-12-18 | Bosch Gmbh Robert | Drehratensensor |
| EP0828992B1 (de) | 1995-05-31 | 2001-08-01 | LITEF GmbH | Mikromechanischer drehratensensor |
| DE19530007C2 (de) * | 1995-08-16 | 1998-11-26 | Bosch Gmbh Robert | Drehratensensor |
| US5756895A (en) | 1995-09-01 | 1998-05-26 | Hughes Aircraft Company | Tunneling-based rate gyros with simple drive and sense axis coupling |
| KR0171009B1 (ko) | 1995-12-07 | 1999-05-01 | 양승택 | 원판 진동형 마이크로 자이로스코프 및 그의 제조방법 |
| US5894090A (en) | 1996-05-31 | 1999-04-13 | California Institute Of Technology | Silicon bulk micromachined, symmetric, degenerate vibratorygyroscope, accelerometer and sensor and method for using the same |
| DE19641284C1 (de) | 1996-10-07 | 1998-05-20 | Inst Mikro Und Informationstec | Drehratensensor mit entkoppelten orthogonalen Primär- und Sekundärschwingungen |
| US6151964A (en) * | 1998-05-25 | 2000-11-28 | Citizen Watch Co., Ltd. | Angular velocity sensing device |
| US5920012A (en) | 1998-06-16 | 1999-07-06 | Boeing North American | Micromechanical inertial sensor |
| JP3106395B2 (ja) | 1998-07-10 | 2000-11-06 | 株式会社村田製作所 | 角速度センサ |
| GB9817347D0 (en) * | 1998-08-11 | 1998-10-07 | British Aerospace | An angular rate sensor |
| US6164134A (en) | 1999-01-29 | 2000-12-26 | Hughes Electronics Corporation | Balanced vibratory gyroscope and amplitude control for same |
| US6481285B1 (en) | 1999-04-21 | 2002-11-19 | Andrei M. Shkel | Micro-machined angle-measuring gyroscope |
| US6289733B1 (en) | 1999-05-12 | 2001-09-18 | Hughes Electronics Corporation | Planar vibratory gyroscopes |
| US6245590B1 (en) * | 1999-08-05 | 2001-06-12 | Microvision Inc. | Frequency tunable resonant scanner and method of making |
-
2003
- 2003-02-20 US US10/370,953 patent/US7017410B2/en not_active Expired - Lifetime
-
2004
- 2004-02-20 EP EP04003915A patent/EP1450131B1/en not_active Expired - Lifetime
- 2004-02-20 DE DE602004032075T patent/DE602004032075D1/de not_active Expired - Lifetime
- 2004-02-20 JP JP2004044947A patent/JP4620364B2/ja not_active Expired - Fee Related
-
2005
- 2005-02-04 US US11/051,884 patent/US7093486B2/en not_active Expired - Lifetime
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09512904A (ja) * | 1994-03-08 | 1997-12-22 | ニューカーマンズ、アーモンド、ピー. | 一体化センサを備えたモノリシックシリコン・レートジャイロ |
| JPH08226931A (ja) * | 1995-02-21 | 1996-09-03 | Wako:Kk | 角速度センサ |
| JPH08285608A (ja) * | 1995-04-14 | 1996-11-01 | Miyota Kk | 角速度センサ |
| JPH10227644A (ja) * | 1997-02-12 | 1998-08-25 | Wako:Kk | 振動子を用いた角速度センサ |
| US6009751A (en) * | 1998-10-27 | 2000-01-04 | Ljung; Bo Hans Gunnar | Coriolis gyro sensor |
| US6367786B1 (en) * | 1999-06-07 | 2002-04-09 | California Institute Of Technology | Micromachined double resonator |
| JP2002350138A (ja) * | 2001-05-28 | 2002-12-04 | Wacoh Corp | 加速度と角速度との双方を検出する装置 |
| US20030029238A1 (en) * | 2001-08-10 | 2003-02-13 | The Boeing Company | Isolated resonator gyroscope |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004251909A (ja) | 2004-09-09 |
| US7093486B2 (en) | 2006-08-22 |
| US20060070440A1 (en) | 2006-04-06 |
| EP1450131A3 (en) | 2005-03-16 |
| US20030150267A1 (en) | 2003-08-14 |
| EP1450131B1 (en) | 2011-04-06 |
| DE602004032075D1 (de) | 2011-05-19 |
| EP1450131A2 (en) | 2004-08-25 |
| US7017410B2 (en) | 2006-03-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4620364B2 (ja) | 駆動および感知プレートを有する分離された共振子ジャイロスコープ | |
| US6629460B2 (en) | Isolated resonator gyroscope | |
| JP3834397B2 (ja) | レートセンサ | |
| US6009751A (en) | Coriolis gyro sensor | |
| US6487907B1 (en) | Microgyroscope with integrated vibratory element | |
| US7210347B2 (en) | Micromachined inertial sensor for measuring rotational movements | |
| JP6514790B2 (ja) | ジャイロスコープ | |
| US6539801B1 (en) | Z-axis vibratory gyroscope | |
| US9315376B2 (en) | Planar structure for a triaxial gyrometer | |
| US6990863B2 (en) | Isolated resonator gyroscope with isolation trimming using a secondary element | |
| EP0574143B1 (en) | Angular rate sensor and method of production thereof | |
| US6823734B1 (en) | Electrostatic spring softening in redundant degree of freedom resonators | |
| US6955084B2 (en) | Isolated resonator gyroscope with compact flexures | |
| US20240053147A1 (en) | Vibrating gyrometer with planar structure | |
| KR100319920B1 (ko) | 비대칭 내부 비틀림 짐벌을 가진 측면 구동 방식의 짐벌형 자이로스코프 | |
| EP1571416B1 (en) | Support of vibrating beam near nodal point | |
| Challoner et al. | Isolated resonator gyroscope with a drive and sense plate | |
| Sabageh | Design and modeling of decoupled and tunable bandwidth (40-330 Hz) MEMS vibratory gyroscopes | |
| Ioku et al. | Design consideration of micro gyroscope stabilized for acceleration |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050713 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061215 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20091109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091110 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101005 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101028 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131105 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4620364 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |