JP4602154B2 - ピペットニードルで液体を分注する方法および装置 - Google Patents
ピペットニードルで液体を分注する方法および装置 Download PDFInfo
- Publication number
- JP4602154B2 JP4602154B2 JP2005141507A JP2005141507A JP4602154B2 JP 4602154 B2 JP4602154 B2 JP 4602154B2 JP 2005141507 A JP2005141507 A JP 2005141507A JP 2005141507 A JP2005141507 A JP 2005141507A JP 4602154 B2 JP4602154 B2 JP 4602154B2
- Authority
- JP
- Japan
- Prior art keywords
- needle
- pipette needle
- tip
- wave
- pipette
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/02—Burettes; Pipettes
- B01L3/0241—Drop counters; Drop formers
- B01L3/0268—Drop counters; Drop formers using pulse dispensing or spraying, eg. inkjet type, piezo actuated ejection of droplets from capillaries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0433—Moving fluids with specific forces or mechanical means specific forces vibrational forces
- B01L2400/0439—Moving fluids with specific forces or mechanical means specific forces vibrational forces ultrasonic vibrations, vibrating piezo elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N2035/1027—General features of the devices
- G01N2035/1034—Transferring microquantities of liquid
- G01N2035/1039—Micropipettes, e.g. microcapillary tubes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T436/00—Chemistry: analytical and immunological testing
- Y10T436/25—Chemistry: analytical and immunological testing including sample preparation
- Y10T436/2575—Volumetric liquid transfer
Landscapes
- Health & Medical Sciences (AREA)
- Clinical Laboratory Science (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Sampling And Sample Adjustment (AREA)
- Feeding, Discharge, Calcimining, Fusing, And Gas-Generation Devices (AREA)
Description
・細長い形状でなければならず、また液体容器中を深く進入するのに十分長くなくてはならない。
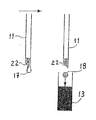
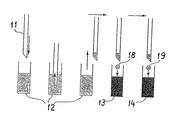
以下に図2〜12を参照しながら本発明による方法を説明する。この方法は、ピペットニードルと容器に入っている液体とを接触させることなくピペットニードルにより容器の中に液体容量を分注するのに適している。
(b) ピペットニードル11の先端部22のところに機械的波動を集束させることにより液滴17を先端部22から放出させること。
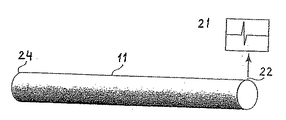
本発明による方法を実施するのに好適な成分または構成をもつ励振パルスをつくりだすためには、液体で満たされたニードル、および、そのニードルと機械的に接続されている圧電作動器を有してなるシステム中のある所望の集束パルスの波動伝播が有限差分法(FDM: Finite Difference Method)によりシミュレーションされる。その後、その所望集束パルスを得るのに好適な構成をもつ励振パルスが時間反転法により計算される。
(b) 実際にはこの機械的励振パルスがピペットニードルに加えられることになるところであるスポットにシミュレーションでは現われる機械的パルスに対応する電気的パルス信号を記録すること、および
(c) 実際には圧電変換器に加えられることになる、ステップ(b)で得られた記録信号の時間反転により計算される励振パルス信号を計算すること。
図13および14を参照して以下本発明によるマイクロピペット装置の第1の実施形態を説明する。このマイクロピペット装置は、ピペットニードルと容器に入っている液体とを接触させることなくピペットニードルによりある液体容量を容器の中に分注するのに適している。
図15に示すピペットニードルの寸法は以下のとおりである。
A1 69
L1 86
L2 5
L3 9
D1 0.9
D2 1.5
D3 3
D4 5
L4 13.5
L5 0.5
D5 0.6
図 15に示されているピペットニードル11の実施形態では、ニードルの先端部22は示されているとおりの円筒形状をしており、この先端部は直径D5をもつと示されている。図 16に示されている別のピペットニードルの実施形態は同様の形状と寸法をもつが、ニードルの先端部は鋭利な末端部を有しており、これは容器の蓋を突き通るのに適している。
12 容器
13 容器
14 容器
15 ピペットニードル11の洗浄位置
16 ピペットニードル11の洗浄位置
17 ニードル11の先端部により保持されている液滴/液滴容量
18 液滴
19 液滴
21 ニードル11の先端部のところにおける集束パルス
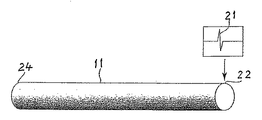
22 ピペットニードルの液滴送達先端部/機械的波動が集束されるところであるピペットニードルのスポット
23 ピペットニードル中の波動伝播
24 ピペットニードルの励振ポイント
25 励振ポイント24における記録信号
26 信号25/励振パルス/励振パルス信号から誘導された時間反転信号
27 ピペットニードル中の波動伝播
31 ニードルホルダー
32 電気機械変換器/圧電変換器
33 電気的励振信号発生器
34 接続部品
35 管路
36 移送システム
37 制御ユニット
38 移送システムのアーム
41 容器
47 容器41中の液体48の自由表面
48 容器中の液体。
Claims (10)
- ピペットニードルと容器に入っている液体とを接触させることなくピペットニードルによりある液体容量を容器の中に分注する方法であって、
(a) ピペットニードル(11)の送達先端部(22)のところに、付着力によってその先端部に保持されている液滴(17)を形成させること、および
(b) 電気機械変換器(32)を電気的励振パルス信号(26)で励振させることにより達成される波動集束であって、その信号を電気機械変換器(32)に加えてピペットニードル(11)を、ピペットニードルの先端部のところに集束されるようそのピペットニードルの波動分散特性から計算されるある所定の波動成分をもつ、ピペットニードル中を伝播して行く機械的波動のパルスで機械的に励振させることにより達成される波動集束により、ピペットニードル(11)の送達先端部のところに機械的波動を集束させて、送達先端部からの液滴(17)の放出を引き起こすピペットニードルの先端部のところにおける集束入射波動と反射波動の重なりをつくることで、この液滴(17)を送達先端部(22)から放出させること、
を含み、
前記機械的波動のパルスは、それぞれがその個々の波動分散特性をもつ種々の伝播モードのパルスであり、これらのパルスがピペットニードル(11)の先端部のところに集束させられ、重ねられる上記方法。 - 前記励振パルス信号(26)がピペットニードル(11)の長さおよび波動分散特性に合うようにされている、請求項1に記載の方法。
- 前記励振パルス(26)が、
(a) 実際の実験では集束パルスがつくりだされ、それによって、ピペットニードル(11)の送達先端部(22)のところに形成された、そこに付着力によって付いている液滴(17)が放出させられることになるところであるスポット(22)にシミュレーションで加えられる機械的パルスの、毛細管形状をしたピペットニードルの一部分の壁の中を通る伝播を有限差分法によりシミュレーションするステップ、
(b) 実際には機械的励振パルスがピペットニードル(11)に加えられることになるところであるスポット(24)にシミュレーションで現われる機械的パルスに対応する電気的パルス信号(25)を記録するステップ、および
(c) 実際には電気機械変換器(32)に加えられることになる励振パルス信号(26)であって、
ステップ(b)で得られた記録信号(25)の時間反転により計算されるこの励振パルス信号(26)を計算するステップ、
によりつくりだされる請求項1または2に記載の方法。 - ピペットニードルと容器に入っている液体とを接触させることなくピペットニードルによりある液体容量を容器の中に分注するためのマイクロピペット装置であって、
(a) 送達先端部を含む第1の末端部、および、正または負の圧力源に接続された第2の末端部を有しているピペットニードル(11)、
(b) このピペットニードル(11)と、ピペットニードルの第2の末端部を含むピペットニードルの第1の部分のところで機械的に接続されている電気機械変換器(32)(ニードルの第2の部分は、第1の部分と送達先端部までの間に延びている)、および
(c) 励振パルス信号(26)をつくりだすための電気信号発生手段(33)であって、その信号を電気機械変換器(32)に加えてピペットニードル(11)を、電気信号発生手段(33)がつくりだす、ピペットニードルの末端先端部のところに集束されるようそのピペットニードルの波動分散特性から計算されるある所定の波動成分をもつ、ニードル中を伝播して行く機械的波動のパルスで機械的に励振させ、それによってこのピペットニードルの送達先端部に形成された液滴(17)の放出を引き起こすための電気信号発生手段(33)、
を有し、
前記機械的波動のパルスは、それぞれがその個々の波動分散特性をもつ種々の伝播モードのパルスであり、これらのパルスがピペットニードル(11)の先端部のところに集束させられ、重ねられる上記装置。 - 前記電気信号発生手段(33)が、ピペットニードル(11)の長さおよび波動分散特性に合うようにされている励振パルス信号(26)をつくりだす、請求項4に記載のマイクロピペット装置。
- 前記電気機械変換器(32)が圧電変換器である請求項4に記載のマイクロピペット装置。
- 前記圧電変換器(32)は円筒形状であり、前記圧電変換器(32)が前記圧電変換器の径方向に偏極している請求項6に記載のマイクロピペット装置。
- 前記圧電変換器(32)は円筒形状であり、前記圧電変換器(32)が前記圧電変換器の軸方向に偏極している請求項6に記載のマイクロピペット装置。
- 前記圧電変換器(32)に加えられる励振パルス信号(26)が、ニードル(11)内で主に径方向の液体変位を引き起こすように設定されている、請求項6〜8のいずれか1項に記載のマイクロピペット装置。
- 前記圧電変換器(32)に加えられる励振パルス信号(26)が、ニードル(11)内で主に軸方向の液体変位を引き起こすように設定されている、請求項6〜8のいずれか1項に記載のマイクロピペット装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP04076436A EP1604741A1 (en) | 2004-05-14 | 2004-05-14 | Method and apparatus for dispensing a liquid with a pipetting needle |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005326421A JP2005326421A (ja) | 2005-11-24 |
| JP2005326421A5 JP2005326421A5 (ja) | 2008-04-17 |
| JP4602154B2 true JP4602154B2 (ja) | 2010-12-22 |
Family
ID=34928221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005141507A Expired - Fee Related JP4602154B2 (ja) | 2004-05-14 | 2005-05-13 | ピペットニードルで液体を分注する方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7615378B2 (ja) |
| EP (1) | EP1604741A1 (ja) |
| JP (1) | JP4602154B2 (ja) |
| AT (1) | ATE373519T1 (ja) |
| CA (1) | CA2505216C (ja) |
| DE (1) | DE602005002499T2 (ja) |
| ES (1) | ES2293472T3 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010001229A1 (de) * | 2010-01-26 | 2011-07-28 | Hamilton Bonaduz Ag | Verfahren und Vorrichtung zur Bestimmung eines flüssigkeitsspezifischen oder vom Benetzungszustand einer Pipettierspitze abhängigen Parameters durch Schwingungsanregung |
| WO2012064975A1 (en) | 2010-11-12 | 2012-05-18 | Gen9, Inc. | Protein arrays and methods of using and making the same |
| US9068566B2 (en) | 2011-01-21 | 2015-06-30 | Biodot, Inc. | Piezoelectric dispenser with a longitudinal transducer and replaceable capillary tube |
| US20130206857A1 (en) * | 2011-01-21 | 2013-08-15 | Biodot, Inc. | Piezoelectric dispenser with a longitudinal transducer and replaceable capillary tube |
| EP2748318B1 (en) | 2011-08-26 | 2015-11-04 | Gen9, Inc. | Compositions and methods for high fidelity assembly of nucleic acids |
| US9150853B2 (en) | 2012-03-21 | 2015-10-06 | Gen9, Inc. | Methods for screening proteins using DNA encoded chemical libraries as templates for enzyme catalysis |
| LT2841601T (lt) | 2012-04-24 | 2019-07-10 | Gen9, Inc. | Nukleorūgščių rūšiavimo būdai ir multipleksinis preparatyvinis in vitro klonavimas |
| CN103472243B (zh) * | 2012-06-06 | 2016-08-03 | 北京普源精仪科技有限责任公司 | 一种自动进样器及取样针 |
| US20200095705A1 (en) * | 2017-05-22 | 2020-03-26 | Gen9, Inc. | Device and method for nucleic acid manipulation |
| CN118253359A (zh) * | 2018-01-24 | 2024-06-28 | 思纳福(苏州)生命科技有限公司 | 吐液枪头、微液滴生成装置及生成方法 |
| CN109908986B (zh) * | 2019-02-21 | 2020-04-28 | 浙江大学 | 一种基于出口不对称毛细管的液滴生成系统及使用方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3341023B2 (ja) * | 1995-08-07 | 2002-11-05 | オムロン株式会社 | 表面弾性波を利用した噴霧装置および噴霧方法 |
| JP2003050244A (ja) * | 2001-08-07 | 2003-02-21 | Matsushita Electric Ind Co Ltd | 分注機 |
| JP2004114462A (ja) * | 2002-09-25 | 2004-04-15 | Canon Inc | 液体吐出ヘッド、液体吐出ヘッドの駆動方法、および液体吐出装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4974458A (en) * | 1987-12-14 | 1990-12-04 | Ajinomoto Company, Inc. | Automatic preparation apparatus and support arm |
| JPH0781996B2 (ja) * | 1988-08-27 | 1995-09-06 | 株式会社日立製作所 | オートサンプラ |
| US5582798A (en) * | 1995-02-23 | 1996-12-10 | Cyberlab Inc. | Volume sensing device |
| JPH08338849A (ja) * | 1995-04-11 | 1996-12-24 | Precision Syst Sci Kk | 液体の吸引判別方法およびこの方法により駆動制御される分注装置 |
| US5750881A (en) * | 1995-07-13 | 1998-05-12 | Chiron Diagnostics Corporation | Method and apparatus for aspirating and dispensing sample fluids |
| US6003388A (en) * | 1997-09-17 | 1999-12-21 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | System for manipulating drops and bubbles using acoustic radiation pressure |
| US6296811B1 (en) * | 1998-12-10 | 2001-10-02 | Aurora Biosciences Corporation | Fluid dispenser and dispensing methods |
| US6232129B1 (en) * | 1999-02-03 | 2001-05-15 | Peter Wiktor | Piezoelectric pipetting device |
| EP1207396A1 (fr) * | 2000-10-20 | 2002-05-22 | Seyonic SA | Dispositif dispensateur de fluide |
| CH695544A5 (de) * | 2000-11-17 | 2006-06-30 | Tecan Trading Ag | Vorrichtung zur Abgabe bzw. Aufnahme/Abgabe von Flüssigkeitsproben. |
| US20020150511A1 (en) * | 2001-03-01 | 2002-10-17 | Peter Wiktor | Piezoelectric pipetting device housing and methods for making and using the same |
| US7097810B2 (en) * | 2002-06-26 | 2006-08-29 | The Public Health Research Institute Of The City Of New York, Inc. | Delivery of metered amounts of liquid materials |
| US6874699B2 (en) * | 2002-10-15 | 2005-04-05 | Wisconsin Alumni Research Foundation | Methods and apparata for precisely dispensing microvolumes of fluids |
| US7125727B2 (en) * | 2003-01-29 | 2006-10-24 | Protedyne Corporation | Sample handling tool with piezoelectric actuator |
| US7396512B2 (en) * | 2003-11-04 | 2008-07-08 | Drummond Scientific Company | Automatic precision non-contact open-loop fluid dispensing |
| US7258480B2 (en) * | 2005-01-10 | 2007-08-21 | Dade Behring Inc. | Apparatus for mixing liquid samples using a two dimensional stirring pattern |
-
2004
- 2004-05-14 EP EP04076436A patent/EP1604741A1/en not_active Withdrawn
-
2005
- 2005-04-25 ES ES05075977T patent/ES2293472T3/es active Active
- 2005-04-25 AT AT05075977T patent/ATE373519T1/de active
- 2005-04-25 DE DE602005002499T patent/DE602005002499T2/de active Active
- 2005-04-26 CA CA2505216A patent/CA2505216C/en not_active Expired - Fee Related
- 2005-05-13 JP JP2005141507A patent/JP4602154B2/ja not_active Expired - Fee Related
- 2005-05-13 US US11/128,677 patent/US7615378B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3341023B2 (ja) * | 1995-08-07 | 2002-11-05 | オムロン株式会社 | 表面弾性波を利用した噴霧装置および噴霧方法 |
| JP2003050244A (ja) * | 2001-08-07 | 2003-02-21 | Matsushita Electric Ind Co Ltd | 分注機 |
| JP2004114462A (ja) * | 2002-09-25 | 2004-04-15 | Canon Inc | 液体吐出ヘッド、液体吐出ヘッドの駆動方法、および液体吐出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2505216C (en) | 2010-01-26 |
| CA2505216A1 (en) | 2005-11-14 |
| ATE373519T1 (de) | 2007-10-15 |
| JP2005326421A (ja) | 2005-11-24 |
| DE602005002499T2 (de) | 2008-06-19 |
| US7615378B2 (en) | 2009-11-10 |
| EP1604741A1 (en) | 2005-12-14 |
| DE602005002499D1 (de) | 2007-10-31 |
| US20060286678A1 (en) | 2006-12-21 |
| ES2293472T3 (es) | 2008-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4602154B2 (ja) | ピペットニードルで液体を分注する方法および装置 | |
| US9908133B2 (en) | Acoustically ejecting a droplet of fluid from a reservoir by an acoustic fluid ejection apparatus | |
| US7354141B2 (en) | Acoustic assessment of characteristics of a fluid relevant to acoustic ejection | |
| US6938995B2 (en) | Acoustic assessment of fluids in a plurality of reservoirs | |
| US8127614B2 (en) | Methods and systems for ultrasonic coupling using ultrasonic radiation pressure | |
| US11717818B2 (en) | Focused acoustic radiation for the ejection of sub wavelength droplets | |
| JP2005326421A5 (ja) | ||
| US20040119793A1 (en) | Acoustic assessment of fluids in a plurality of reservoirs | |
| US8882226B2 (en) | Focus-activated acoustic ejection | |
| US7281413B2 (en) | Acoustic method for determining the viscosity and/or surface tension of a liquid | |
| JP2004513376A (ja) | 液体サンプルを分配または吸引/分配するための装置およびシステム | |
| EP1614469B1 (en) | Method and apparatus for dispensing a liquid with a pipetting needle | |
| WO2002092228A2 (en) | A method and device for dispensing of droplets | |
| Kim et al. | Pressure wave and fluid velocity in a bend-mode inkjet nozzle with double PZT actuators | |
| Lee et al. | Droplet-based microreactions with oil encapsulation | |
| JP2000310645A (ja) | 液体分注装置 | |
| Morsink | Tubular jet generation by pressure pulse impact | |
| Capalbo et al. | Noncontact Determination of Fluid Properties by Means of Focused Acoustics | |
| Hon et al. | Study of piezoelectric transducer for liquid ejection | |
| IE20020333A1 (en) | A method and device for dispensing of droplets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080229 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080229 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100914 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100929 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4602154 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |