JP4592059B2 - 記録装置 - Google Patents
記録装置 Download PDFInfo
- Publication number
- JP4592059B2 JP4592059B2 JP2004117056A JP2004117056A JP4592059B2 JP 4592059 B2 JP4592059 B2 JP 4592059B2 JP 2004117056 A JP2004117056 A JP 2004117056A JP 2004117056 A JP2004117056 A JP 2004117056A JP 4592059 B2 JP4592059 B2 JP 4592059B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- sensor
- reading
- recorded
- recording medium
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Description
また、本発明による記録装置は、記録媒体にインクのドットを記録するための複数の記録素子が配列された記録ヘッドを前記複数の記録素子が配列する方向と略直交する方走査向へ走査させるための走査手段と、前記記録媒体に記録されたパターンを光学的に読み取り可能なセンサーとを有する記録装置であって、前記記録媒体に対して所定のパターンを前記記録ヘッドにより記録させるパターン記録手段と、前記記録媒体に記録された所定のパターンを前記センサーに読み取らせる読取手段と、前記読取手段による読み取り結果に基づいて、前記センサーの光学倍率を算出する算出手段とを有し、前記所定のパターンは、インクのドットが記録される領域とインクのドットが記録されない領域とを含み、前記センサーの読み取り対象となる前記インクのドットが記録されない領域の前記記録ヘッドの走査方向の幅は、前記走査方向における前記センサーの読み取り範囲の幅以下であり、前記算出手段は、前記インクのドットが記録されない領域の前記記録ヘッドの走査方向の幅に基づいて、前記センサーの光学倍率を算出することを特徴とする。
本実施形態は、記録ヘッドの複数の記録素子により形成されたテストパターンを計測することにより、記録ヘッドの記録素子間の特性の違いを検出しておき、それに基づいて、記録ヘッドの記録素子間の特性の不均一さによる記録画像の濃度むらを補償するインクジェット記録装置に適用したものである。初めに、本発明で適用可能なインクジェット記録装置の機構的な全体構成、及び動作を説明する。
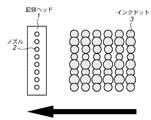
まず、初めに、上述したステップ(C)を実現するための構成について、図2〜図4を用いて簡単に説明する。なお、この図2〜図4に示される構成は公知であるため、その説明は簡略化して行う。
ところで、上述の通り、このような濃度補正を行う際には、読取ステップにおいて読み取った濃度(ドット)がどのノズルで形成されたのかを正しく特定する必要がある。このため、記録ヘッド1により記録される濃度補正用ドットパターンの隣に、その濃度(ドット)を形成したノズルを特定するためのノズル位置関係検出用のドットパターンを記録し、これを読み取ることにより濃度補正用ドットパターン内のドットとそのドットを形成した各ノズルとを結びつける。このドットパターンの一例を図5に示す。
さて、図5において位置関係検出用パターンの記録に選択したノズル以外のノズルについては、位置関係検出用パターンの記録に選択したノズルからの距離を元に、濃度補正用パターンの濃度(ドット)とその濃度(ドット)を形成したノズルの対応付けを行う事になる。この際、濃度補正用パターンの濃度(ドット)を読み取るための読取センサーの光学倍率が設計値からずれていると、それに対応して濃度補正用パターンの濃度(ドット)とその濃度(ドット)を形成したノズルの対応付けが狂うことになる。そこで、これを補償するためのセンサーの光学倍率を測定する必要がある。
本実施形態は、光学倍率の測定ステップ以外は第1の実施形態と同一である。従って、以下では、本実施形態に特徴的な光学倍率の測定ステップについてのみ説明し、それ以外の説明については省略する。
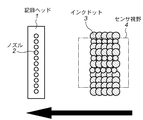
図9は第1の実施形態で適用される図6に相当するものであって、周囲よりも濃度が高い部分(インクドットの集合部分)の縦方向における幅がセンサーの視野の範囲内に納まるようにしたテストパターンである。この図9では、テストパターンの形成に使用されるノズルのうち、一つのノズルが不吐ノズルとなってしまい、本来形成されるべきインクドット列(白丸で示される部分)が形成されない様子を示している。
本実施形態において光学倍率の測定ステップ以外は第1〜2の実施形態と同一である。従って、以下では、本実施形態に特徴的な光学倍率の測定ステップについてのみ説明し、それ以外の説明については省略する。
本実施形態はセンサーの光学倍率算出手段を記録装置の外部に設けたものであり、それ以外は第1〜3の実施形態と同一である。
上述した各実施形態では、(1)センサーの光学倍率を計測すること、および(2)計測したセンサーの光学倍率を考慮した上で記録ヘッドの各記録素子の濃度補正を行うことを、インクジェット記録装置に適用する場合について説明したが、本発明が適用できるのはインクジェット記録装置に限定されない。例えば、転写用リボンのインクを記録ヘッドの記録素子(ヒータ)にて記録媒体へ転写して記録を行う昇華型熱転写方式あるいは熔融型熱転写方式等、インクジェット記録装置以外の画像記録装置に対しても適用可能である。
各実施形態の構成によれば、記録ヘッドにより記録媒体表面に形成した像の内、周囲よりも濃度が高い部分(例えば、インクドットの集合)の外形の少なくとも一方向の幅がセンサーの視野に収まる。このため、像に対するセンサーの相対移動を伴わずに、センサーを静止させたままの状態で、センサーの光学倍率を測定することができる。従って、センサーの相対移動に伴う誤差を発生させずに済み、簡単かつ高精度でセンサーの光学倍率を測定することが可能となる。
2 ノズル
3 インクドット
4 センサー視野
5 本来吐出されるべきインクドットの位置
Claims (5)
- 記録媒体にインクのドットを記録するための複数の記録素子が配列された記録ヘッドを前記複数の記録素子が配列する方向と略直交する走査方向へ走査させるための走査手段と、前記記録媒体に記録されたパターンを光学的に読み取り可能なセンサーとを有する記録装置であって、
前記記録媒体に対して所定のパターンを前記記録ヘッドにより記録させるパターン記録手段と、
前記記録媒体に記録された所定のパターンを前記センサーに読み取らせる読取手段と、
前記読取手段による読み取り結果に基づいて、前記センサーの光学倍率を算出する算出手段とを有し、
前記所定のパターンは、前記記録ヘッドにより吐出されるインクのドットの集合体を含み、
前記所定のパターンの内、前記センサーの読み取り対象となる部分の前記記録ヘッドの走査方向の長さは、前記走査方向における前記センサーの読み取り範囲の幅以下であり、
前記算出手段は、前記センサーの読み取り対象となる部分の前記記録ヘッドの走査方向の長さに基づいて、前記センサーの光学倍率を算出することを特徴とする記録装置。 - 記録媒体にインクのドットを記録するための複数の記録素子が配列された記録ヘッドを前記複数の記録素子が配列する方向と略直交する走査方向へ走査させるための走査手段と、前記記録媒体に記録されたパターンを光学的に読み取り可能なセンサーとを有する記録装置であって、
前記センサーの光学倍率の算出に用いられる所定のパターンを、前記記録ヘッドにより前記記録媒体に記録させるパターン記録手段と、
前記記録媒体に記録された所定のパターンを前記センサーに読み取らせる読取手段と、
前記読取手段による読み取り結果に基づいて、前記センサーの光学倍率を算出する算出手段と、
前記記録ヘッドの複数の記録素子の濃度特性を補正するために用いられる第2の所定のパターンを、前記記録ヘッドにより前記記録媒体に記録させる第2パターン記録手段と、
前記記録媒体に記録された第2の所定のパターンを前記センサーに読み取らせる第2読取手段と、
前記第2読取手段による読み取り結果と前記算出手段により算出された光学倍率とに基づいて、前記第2の所定のパターンの記録に使用された複数の記録素子について濃度補正を行う補正手段とを有し、
前記所定のパターンは前記記録ヘッドにより吐出されるインクのドットの集合体を含み、
前記所定のパターンの内、前記センサーの読み取り対象となる部分の前記記録ヘッドの走査方向の長さは、前記走査方向における前記センサーの読み取り範囲の幅以下であり、
前記算出手段は、前記センサーの読み取り対象となる部分の前記記録ヘッドの走査方向の長さに基づいて、前記センサーの光学倍率を算出することを特徴とする記録装置。 - 記録媒体にインクのドットを記録するための複数の記録素子が配列された記録ヘッドを前記複数の記録素子が配列する方向と略直交する走査方向へ走査させるための走査手段と、前記記録媒体に記録されたパターンを光学的に読み取り可能なセンサーとを有する記録装置であって、
前記記録媒体に対して所定のパターンを前記記録ヘッドにより記録させるパターン記録手段と、
前記記録媒体に記録された所定のパターンを前記センサーに読み取らせる読取手段と、
前記読取手段による読み取り結果に基づいて、前記センサーの光学倍率を算出する算出手段とを有し、
前記所定のパターンは、インクのドットが記録される領域とインクのドットが記録されない領域とを含み、
前記センサーの読み取り対象となる前記インクのドットが記録される領域の前記記録ヘッドの走査方向の幅は、前記走査方向における前記センサーの読み取り範囲の幅以下であり、
前記算出手段は、前記インクのドットが記録される領域の前記記録ヘッドの走査方向の幅に基づいて、前記センサーの光学倍率を算出することを特徴とする記録装置。 - 記録媒体にインクのドットを記録するための複数の記録素子が配列された記録ヘッドを前記複数の記録素子が配列する方向と略直交する走査方向へ走査させるための走査手段と、前記記録媒体に記録されたパターンを光学的に読み取り可能なセンサーとを有する記録装置であって、
前記記録媒体に対して所定のパターンを前記記録ヘッドにより記録させるパターン記録手段と、
前記記録媒体に記録された所定のパターンを前記センサーに読み取らせる読取手段と、
前記読取手段による読み取り結果に基づいて、前記センサーの光学倍率を算出する算出手段とを有し、
前記所定のパターンは、インクのドットが記録される領域とインクのドットが記録されない領域とを含み、
前記センサーの読み取り対象となる前記インクのドットが記録されない領域の前記記録ヘッドの走査方向の幅は、前記走査方向における前記センサーの読み取り範囲の幅以下であり、
前記算出手段は、前記インクのドットが記録されない領域の前記記録ヘッドの走査方向の幅に基づいて、前記センサーの光学倍率を算出することを特徴とする記録装置。 - 前記読取手段は、前記センサーを静止させたままの状態で前記所定のパターンを前記センサーに読み取らせることを特徴とする請求項1乃至4のいずれか1項に記載の記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004117056A JP4592059B2 (ja) | 2004-04-12 | 2004-04-12 | 記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004117056A JP4592059B2 (ja) | 2004-04-12 | 2004-04-12 | 記録装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010136641A Division JP4993790B2 (ja) | 2010-06-15 | 2010-06-15 | 画像処理方法及び画像処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005297361A JP2005297361A (ja) | 2005-10-27 |
| JP2005297361A5 JP2005297361A5 (ja) | 2007-05-31 |
| JP4592059B2 true JP4592059B2 (ja) | 2010-12-01 |
Family
ID=35329501
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004117056A Expired - Fee Related JP4592059B2 (ja) | 2004-04-12 | 2004-04-12 | 記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4592059B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5469796B2 (ja) * | 2006-02-03 | 2014-04-16 | 富士フイルム株式会社 | 画像形成装置 |
| JP4861111B2 (ja) * | 2006-09-27 | 2012-01-25 | 富士フイルム株式会社 | 打滴点サイズ検出方法 |
| JP5311973B2 (ja) * | 2008-11-10 | 2013-10-09 | キヤノン株式会社 | プリンタ |
| JP5131931B2 (ja) * | 2009-02-26 | 2013-01-30 | 富士フイルム株式会社 | 画像記録装置、画像処理装置、画像処理方法及びプログラム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11240191A (ja) * | 1998-02-24 | 1999-09-07 | Seiko Epson Corp | ドットプリンタおよびその制御方法 |
| JP2001146038A (ja) * | 1999-11-18 | 2001-05-29 | Canon Inc | 画像処理装置および方法 |
-
2004
- 2004-04-12 JP JP2004117056A patent/JP4592059B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11240191A (ja) * | 1998-02-24 | 1999-09-07 | Seiko Epson Corp | ドットプリンタおよびその制御方法 |
| JP2001146038A (ja) * | 1999-11-18 | 2001-05-29 | Canon Inc | 画像処理装置および方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005297361A (ja) | 2005-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5283685B2 (ja) | 不良記録素子の検出装置及び方法、並びに画像形成装置及び方法 | |
| EP1889722B1 (en) | Array type inkjet printer and method for determining condition of nozzles thereof | |
| JP5063327B2 (ja) | インクジェット記録装置および調整値取得方法 | |
| US7864984B2 (en) | Line position calculating method, correction value obtaining method, and storage medium having program stored thereon | |
| US20100220140A1 (en) | Recording apparatus and transporting method | |
| JP3313119B2 (ja) | インク式画像形成装置 | |
| JP2011011382A (ja) | 記録装置およびパターン形成方法 | |
| JP2011251480A (ja) | 記録装置及びその処理方法 | |
| JP2010240885A (ja) | 吐出不良検出方法及び吐出不良検出装置 | |
| JP5681476B2 (ja) | 不良記録素子の検出装置及び方法、並びに画像形成装置及び方法 | |
| JP5656480B2 (ja) | 記録装置及びその記録位置調整方法 | |
| US20090122108A1 (en) | Liquid ejecting apparatus and transport method | |
| JP4993790B2 (ja) | 画像処理方法及び画像処理装置 | |
| US7571978B2 (en) | Correction value determining method, correction value determining apparatus, and storage medium having program stored thereon | |
| US20110141173A1 (en) | Fluid ejecting apparatus and fluid ejecting method | |
| JP4592059B2 (ja) | 記録装置 | |
| JP6212959B2 (ja) | インクジェットヘッドの傾き検査方法、及び、濃度ムラ抑制方法 | |
| JP2006181842A (ja) | 記録装置及び記録素子の不良検出方法 | |
| JP2010120253A (ja) | プリンタ | |
| US7992992B2 (en) | Transport amount correcting method, recording apparatus, and storage medium having program stored thereon | |
| JP2020093399A (ja) | インクジェット印刷装置および印字不良検出方法 | |
| US7931347B2 (en) | Transporting method and recording apparatus | |
| JP2006159602A (ja) | 記録方法および記録装置 | |
| US7957035B2 (en) | Transport amount correcting method, recording apparatus, and storage medium having program stored thereon | |
| US20080130032A1 (en) | Line position calculating method, correction value obtaining method, and storage medium having program stored thereon |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070405 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100416 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100705 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100910 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100913 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |