JP4585664B2 - Anti-vibration zoom lens device and camera system - Google Patents
Anti-vibration zoom lens device and camera system Download PDFInfo
- Publication number
- JP4585664B2 JP4585664B2 JP2000237599A JP2000237599A JP4585664B2 JP 4585664 B2 JP4585664 B2 JP 4585664B2 JP 2000237599 A JP2000237599 A JP 2000237599A JP 2000237599 A JP2000237599 A JP 2000237599A JP 4585664 B2 JP4585664 B2 JP 4585664B2
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- image
- image blur
- focal length
- blur correction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は、手ぶれや風などによる振動に起因する像ぶれの補正を、例えば可変頂角プリズム(バリアブルアングルプリズム、VAP)や撮影光軸に対し垂直な方向に移動するシフトレンズ(撮影光軸の垂直方向に移動する像ぶれ補正レンズ)等の光学的な像ぶれ補正光学系を用いて行う、フィルムカメラやテレビカメラそしてビデオカメラ等に好適な防振ズームレンズ装置及びカメラシステムに関するものである。
【0002】
【従来の技術】
手ぶれや風などによる振動により撮影系がぶれたときには結像面上において画像ぶれが生じる。従来、このような画像ぶれを可変頂角プリズムやシフトレンズ等から成る像ぶれ補正光学系を用いて補正するようにした撮像装置が種々提案されている。
【0003】
例えば、特開昭61−223819号公報では、もっとも被写体側に屈折型可変頂角プリズムを配置した撮影系において、前記屈折型可変頂角プリズムを配置した撮影系の振動に対応させて前記屈折型可変頂角プリズムの頂角を変化させて画像の安定化を図っている。
【0004】
特開平1−116619号公報や特開平2−124521号公報では加速度センサ等を利用して撮影系の振動を検知し、このとき得られる信号に応じ、撮影系の一部のレンズ群を光軸と直交させる方向に振動させることにより静止画像を得る方法が行なわれている。
【0005】
一般に像ぶれ補正光学系は撮影系のぶれ量を検出する角速度計等の振れ検出手段と振れ検出手段からの信号に基づいて像ぶれの補正量を算出する制御手段、そして制御手段からの信号に基づいて像ぶれを光学的又は電気的に補正する像ぶれ補正駆動手段等の各要素から成っている。
【0006】
【発明が解決しようとする課題】
しかし、変換倍率がk倍の焦点距離変換光学系(エクステンダー)が挿入された場合、画角をωとするとtan(ω/2)が1/kになるが、イメージサイズは変わらないため、像ぶれ補正光学系による画面上での防振可能な最大像移動量がk倍に変化してしまい、撮影者に違和感を与えるという問題点があった。
【0007】
(発明の目的)
本発明の目的は、焦点距離変換光学系が撮影光軸上に挿入されても、画面上での像変化を少なくし、撮影者の違和感を少なくすることができる防振ズームレンズ装置及びカメラシステムを提供することである。
【0008】
【課題を解決するための手段】
上記課題を解決するために、本発明は、ズーム光学系と、像ぶれ補正光学系と、前記像ぶれ補正光学系を制御する制御系と、撮影光軸上への挿脱が可能な焦点距離変換光学系と、を備える防振ズームレンズ装置において、前記撮影光軸上に挿入される前記焦点距離変換光学系の有無を検出する検出手段を備え、前記制御系が、検出された前記焦点距離変換光学系の有無に応じて像ぶれ補正の可能な最大振動角を変化させており、前記制御系が、前記焦点距離変換光学系の変換倍率をk、前記焦点距離変換光学系が挿入されていない時の像ぶれ補正可能な最大振動角をθMAX、前記焦点距離変換光学系挿入時の像ぶれ補正可能な最大振動角をθMAXieとしたとき、
0.8≦(k×tanθMAXie)/(tanθMAX)≦1.2
を満足するように、前記像ぶれ補正光学系を制御することを特徴としている。
【0009】
また、本発明は、防振ズームレンズ装置と、前記防振ズームレンズ装置との間で信号の通信を行うカメラとを備えるカメラシステムである。ここで、前記防振ズームレンズ装置は、ズーム光学系と、像ぶれ補正光学系と、前記像ぶれ補正光学系を制御する制御系と、撮影光軸上への挿脱が可能な焦点距離変換光学系と、を備える防振ズームレンズ装置において、前記撮影光軸上に挿入される前記焦点距離変換光学系の有無を検出する検出手段を備え、前記制御系が、検出された前記焦点距離変換光学系の有無に応じて像ぶれ補正の可能な最大振動角を変化させており、前記制御系が、前記焦点距離変換光学系の変換倍率をk、前記焦点距離変換光学系が挿入されていない時の像ぶれ補正可能な最大振動角をθMAX、前記焦点距離変換光学系挿入時の像ぶれ補正可能な最大振動角をθMAXieとしたとき、
0.8≦(k×tanθMAXie)/(tanθMAX)≦1.2
を満足するように、前記像ぶれ補正光学系を制御することを特徴としている。
【0010】
【発明の実施の形態】
まず、光学系内の部分系が光軸と直交方向に偏心した場合について、収差論的な立場より、第23回応用物理学講演会(1962年)で松居より示された方法に基づいて説明する。
【0011】
撮影レンズの一部のレンズ群PをEだけ平行偏心させたときの全系の収差量Δ’Yは、数1中の(a)式に示すように偏心前の収差量ΔYと偏心によって発生した偏心収差量ΔY(E)との和になる。ここで偏心収差ΔY(E)は(b)式に示すように1次の偏心コマ収差(IIE)、1次の偏心非点収差(IIIE)、1次の偏心像面湾曲(PE)、1次の偏心歪曲収差(VE1)、1次の偏心歪曲付加収差(VE2)、1次の原点移動ΔEで表わされる。また、(c)式から(h)式の(IIE)〜(ΔE)までの収差は全系の焦点距離を1に規格化したとき近軸光線の偏心レンズ群への軸上マージナル光線の入射角と出射角を各々αp ,αp ’とし、瞳中心を通る主光線の入射角と出射角を各々 ̄(αp ), ̄(αp ’)をとしたときに、 偏心レンズ群の収差係数Ip ,IIp ,IIIp,P p,Vp 、及び偏心レンズ群より像側のレンズ系の収差係数Iq ,IIq ,IIIq ,Pq ,Vq を用いて表わされる。
【0012】
【数1】

このうち、偏心による像移動を表わすのが1次の原点移動(ΔE)である。
【0014】
例えば、変倍移動レンズ群よりも像側に像ぶれを補正する像ぶれ補正光学系を有する場合、変倍移動レンズ群が形成する像点は変化しないので、像ぶれ補正光学系の各偏心収差係数(IIE)〜(ΔE)は変倍に関わらず不変である。
【0015】
像ぶれ補正光学系の最大変位量ΔSMAXによる最大像移動量ΔYMAXは、(b)式においてR=0,ω=0,αk ’=1(Rは入射瞳径、ωは画角、αk ’は軸上マージナル光線の換算傾角)として、次の式で求められる。
【0016】
△YMAX=−(△SMAX×△E)/2・・・・(1)
また、撮影系の振動に伴う像ぶれを補正しうる最大振動角(振れ角)θMAXに伴う最大像移動量(画像ぶれ量)ΔYviは、物体距離無限遠の場合、焦点距離をfとして次の式で求められる。
【0017】
ΔYvi=f×tanθMAX・・・・(2)
画像ぶれを補正するためには像ぶれ補正光学系(IS)の最大像移動量ΔYis=−ΔYviとなるように像ぶれ補正光学系ISを偏心させればよいことから、次の式が成り立つ。
【0018】
△YMAX=−(f×tanθMAX)・・・・(3)
次に変換倍率がk倍の焦点距離変換光学系(IE)が挿入された場合について述べる。まず、焦点距離変換光学系IEが像ぶれ補正光学系ISよりも像面側にある場合は、焦点距離変換光学系IEが挿入されると、全系の焦点距離fがk倍される。また、焦点距離変換光学系IEより物体側の結像倍率がk倍されるため、像ぶれ補正光学系ISの1次の原点移動(ΔE)がk倍になる。
【0019】
今、焦点距離変換光学系IE挿入後の像ぶれ補正光学系ISによる補正可能な最大像移動量をΔYMAXerとすれば、画面上での防振可能な最大像移動量を挿入前と略一定とするためには、イメージサイズが変わらないので、ΔYMAXer≒ΔYMAXでなければならない。故に、焦点距離変換光学系IEが挿入されたときの防振可能な最大振動角をθMAXerとすると、
(k×f)×tanθMAXer≒f×tanθMAX・・・・(4)
であるから、
(k×tanθMAXer)/(tanθMAX)≒1・・・・(5)
とする必要がある。ただし、制御上(5)式左辺を完全に1とするのが難しいこと、そして、我々が評価を行ったところ、±20%以内であれば映像上違和感が少ないと検証できたことから、具体的には(5)式の左辺が次式の範囲内であることが望ましい。
【0020】
0.8≦(k×tanθMAXer)/(tanθMAX)≦1.2・・・・(6)
なお、ズーム光学系のズーム位置(変倍比)が変化した時には、(3)式より像ぶれ補正可能な最大像移動量△YMAXが変化することは明らかであるので、焦点距離変換光学系の変換倍率kのみならず、ズーム位置によっても像ぶれ補正可能な最大像移動量△YMAXを変化させることは勿論である。
【0021】
(6)式において、上下限を越えると、焦点距離変換光学系IE挿入前後で画面上での防振可能な最大像移動量の変化が大きく、映像上違和感があり、よくない。
【0022】
(6)式を満たすようなθMAXerを得るためには、焦点距離変換光学系IEが挿入されたときの像ぶれ補正光学系ISの最大変位量をΔSMAXerとすると、(ΔE)がk倍になること、ΔYMAXer≒ΔYMAXであることから、
(△SMAXer×k△E)/2≒(△SMAX×△E)/2・・・・(7)
であるから、
(k×△SMAXer)/(△SMAX)≒1・・・・(8)
となり、(6)式の上下限値より、ΔSMAXerのとりうる範囲は、
0.8≦(k×△SMAXer)/(△SMAX)≦1.2・・・・(9)
となる。従って、例えば(9)式を満たす範囲で挿入後の像ぶれ補正光学系ISの最大変位量ΔSMAXをデータテーブルとして設定し、挿入後の像ぶれ補正光学系ISの最大変位量ΔSMAXerを制御してやればよい。
【0023】
次に焦点距離変換光学系IEが像ぶれ補正光学系ISよりも物体側にある場合、焦点距離変換光学系IEが挿入されると全系の焦点距離fがk倍されるが、焦点距離変換光学系IEより物体側の結像倍率がk倍されるので、焦点距離変換光学系IEよりも像側にある像ぶれ補正光学系ISの偏心による像移動を表わす1次の原点移動(ΔE)は変わらない。
【0024】
今、焦点距離変換光学系IE挿入後の像ぶれ補正光学系ISにより補正可能な最大像移動量をΔYMAXefとすれば、画面上での防振可能な最大像移動量を挿入前と略一定とするためには、イメージサイズが変わらないので、ΔYMAXef≒ΔYMAXでなければならない。故に、焦点距離変換光学系IEが挿入されたときの防振可能な最大振動角をθMAXefとすると、焦点距離変換光学系IEが像ぶれ補正光学系ISよりも像面側にある場合と同様に考えて、
(k×tanθMAXef)/(tanθMAX)≒1・・・・(10)
とする必要がある。ただし、制御上(10)式左辺を完全に1とするのが難しいこと、そして、我々が評価を行ったところ、±20%以内であれば映像上違和感が少ないと検証できたことから、具体的には(10)式の左辺が次式の範囲内であることが望ましい。
【0025】
0.8≦(k×tanθMAXef)/(tanθMAX)≦1.2・・・・(11)
(11)式において、上下限を越えると,焦点距離変換光学系IE挿入前後で画面上での防振可能な最大像移動量の変化が大きく、映像上違和感があり,よくない。
【0026】
(11)式を満たすようなθMAXefを得るためには、焦点距離変換光学系IEが挿入されたときの像ぶれ光学系ISの最大変位量をΔSMAXefとすると、(ΔE)は変わらないこと、ΔYMAXef≒ΔYMAXであることから、
(△SMAXer×△E)/2≒(△SMAX×△E)/2・・・・(12)
であるから、
△SMAXer≒△SMAX・・・・(13)
となり、(12)式の上下限値からΔSMAXefのとりうる範囲は、
0.8≦(△SMAXef)/(△SMAX)≦1.2・・・・(14)
となる。従って、例えば(14)式を満たす範囲で挿入後の像ぶれ補正光学系ISの最大変位量ΔSMAXefをデータテーブルとして設定し、挿入後の像ぶれ補正光学系ISの最大変位量ΔSMAXefを制御してやればよい。
【0027】
次に前記焦点距離変換光学系IEがイメージサイズ変換光学系として挿入される場合について述べる。まず、焦点距離変換光学系IEが像ぶれ補正光学系ISよりも像面側にある場合は、焦点距離変換光学系IEが挿入されると全系の焦点距離fがk倍され、イメージサイズもk倍される。また、焦点距離変換光学系IEより物体側の結像倍率がk倍されるため、像ぶれ補正光学系ISの偏心による像移動を表わす1次の原点移動(ΔE)がk倍になる。
【0028】
画面上での防振可能な最大像移動量について、挿入後はイメージサイズがk倍されるので、挿入後の像ぶれ補正光学系ISによる補正可能な最大像移動量ΔYMAXerは、単純に挿入前のk倍になるため、ΔYMAXer=k×ΔYMAXでなければならない。故に、焦点距離変換光学系IEが挿入されたときの防振可能な最大振動角をθMAXerとすると、
k×f×tanθMAXer=k×f×tanθMAX・・・・(15)
であるから、
(tanθMAXer)/(tanθMAX)=1・・・・(16)
となるため、イメージサイズ変換光学系の挿入前後で防振可能な最大振動角は変える必要がない。
【0029】
次に焦点距離変換光学系IEがイメージサイズ変換光学系として像ぶれ補正光学系ISよりも物体側にある場合、焦点距離変換光学系IEが挿入されると全系の焦点距離fがk倍され、イメージサイズもk倍される。また、焦点距離変換光学系IEより物体側の結像倍率がk倍されるので、焦点距離変換光学系IEよりも像側にある像ぶれ補正光学系ISの偏心による像移動を表わす1次の原点移動(ΔE)は変わらない。
【0030】
画面上での防振可能な最大像移動量について、挿入後はイメージサイズがk倍されるため、挿入後の像ぶれ補正光学系ISによる補正可能な最大像移動量ΔYMAXefは、単純に挿入前のk倍になるため、ΔYMAXef=k×ΔYMAXでなければならない。故に、焦点距離変換光学系IEが挿入されたときの防振可能な最大振動角をθMAXefとすると、
k×f×tanθMAXef=k×f×tanθMAX・・・・(17)
であるから、
(tanθMAXef)/(tanθMAX)=1・・・・(18)
となるため、イメージサイズ変換光学系の挿入前後で防振可能な最大振動角は変える必要がない。
【0031】
以上(1)〜(18)式は、物体距離無限遠の場合について述べているが、有限距離の場合は焦点距離fだけでなく、合焦状態も加味しなければならないので、C(Z,F)を任意の焦点位置と任意の合焦状態を表わす関数とし、(1)〜(18)式中のfをC(Z,F)と置き換えれば、任意の物体距離においても成立する。
【0032】
また、(1)〜(18)式までのうち、(1)〜(9)式、(15),(16)式は変倍移動レンズ群よりも物体側に像ぶれ補正光学系ISを有する場合にも成立する。
【0033】
(第1の実施形態)
本発明の1つの実施形態における光学系部分に関し、1例として焦点距離変換光学系(以下エクステンダーという)IEが像ぶれ補正光学系ISよりも像面側にある場合について説明する。
【0034】
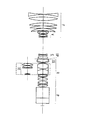
図1及び図2は、光学系部分の広角端無限遠時におけるレンズ配置を示す断面図である。Fは第1群としての正の屈折力のフォーカスレンズ群である。Vは第2群としての変倍用の負の屈折力のバリエータであり、撮影光軸上を像面側へ単調に移動させることにより、広角端から望遠端への変倍を行う。Cは第3群で、図1では負の屈折力、図2では正の屈折力のコンペンセータであり、変倍に伴う像面の変動を補正するため、図1では撮影光軸上を往復軌道の移動をし、図2では撮影光軸上を物体側へ単調に移動をする。バリエータVとコンペンセータCとでズーム光学系(変倍移動レンズ群)を構成している。SPは開口絞り、Rは第4群としての正の屈折力リレーレンズ群であり、固定されている。ISは像ぶれ補正光学系であり、撮影光軸に対し略垂直な平面内を移動させることで全系が振動したときの画像ぶれを補正するシフトレンズとして示されている。IEはエクステンダーであり、図1では所定の他のレンズ群と切り替わることで、図2では所定の空気間隔に挿入することで、全系の焦点距離を望遠側又は広角側にシフトすることができる。Pは色分解光学系や光学フィルタ等であり、図1及び図2ではガラスブロックとして示されている。
【0035】
図3に撮影光学系の振動に伴う像ぶれの概念図を示す。図3において、y00は半画界、y0は半画界y00に対応する像高、OBJは前玉レンズ面からの物体距離、c1は入射瞳位置、t1は前玉レンズ面から入射瞳位置c1までの距離、ωは半画角、c2は撮影光学系全体の振動の回転中心、v1は前玉レンズ面から振動の回転中心までの距離、θは振動角、Lは合焦された物体から振動の回転中心c2までの距離、△y00は物体上での撮影光軸の移動量である。
【0036】
振動角θは、図3に示されるように、振動の回転中心c2を中心とする倒れ角であり、前玉レンズ面から振動の回転中心までの距離v1と振動角θは振動の検出手段を用いて求めることができる。距離v1は、撮影光学系が三脚台座等により支持されている場合には、略一定と想定することができ、所定の定数が与えられるものとして扱うことができる。
【0037】
<数値実施例1>
1例として図1に示される光学系の数値実施例1を図4に示す。エクステンダーIEは、r29からr32を排他的に切り替えることにより、全系の焦点距離を望遠側又は広角側にシフトすることができる。
【0038】
riは物体側より順に第i番目のレンズ面の曲率半径、diは物体側より順に第i番目のレンズ面のレンズ厚又は空気間隔、niとviは各々物体側より順に第i番目のレンズの材質の屈折率とアッベ数である。
【0039】
d10,d18,d21は可変である。焦点距離が8.50、51.00、127.50のときの各々の数値を図5に示す。
【0040】
第11面(r11)及び第18面(r18)は非球面である。非球面形状は光軸方向にX軸、光軸と垂直方向にH軸、光線の進行方向を正とし、Rを近軸曲率半径すなわち参照球面の半径、k,B,C,D,Eを各々非球面係数としたとき、次式で表される。
【0041】
R11面
参照球面R=78.91221
非球面係数
k=−3.23637×10-2
B=3.21318×10-6
C=−3.97113×10-9
D=−1.48889×10-11
E=3.06352×10-14
R18面
参照球面R=133.16287
非球面係数
k=−3.66073×10-2
B=−1.07011×10-7
C=9.22594×10-9
D=−1.68952×10-10
E=4.38262×10-13
図6に数値実施例1の広角端、物体距離無限遠における(c)〜(h)式に対応する各偏心収差係数を示す。
【0042】
<数値実施例2>
次に、エクステンダーIEを切り替えたときの数値実施例2を図7に示す。変換倍率はk=2倍である。
【0043】
d10,d18,d21は可変である。焦点距離が17.00,102.00,255.00のときの各々の数値を図8に示す。また、図9に数値実施例2の広角端、物体距離無限遠における(c)〜(h)式に対応する各偏心収差係数を示す。
【0044】
数値実施例1において、像ぶれ補正光学系ISの最大変位量ΔSMAX=2mmのときの最大像移動量ΔYMAXは、ΔE=−1.0008であるから(1)式よりΔYMAX=1.0008mmとなり、このときの最大振動角θMAXはθMAX=6.715゜である。
【0045】
変換倍率2倍のエクステンダーIEを挿入した数値実施例2においては、イメージサイズは変わらず、焦点距離だけ2倍になるため、θMAX=6.715゜とした場合、変換倍率2倍のエクステンダーIE挿入後の補正可能な最大像移動量ΔYMAXerは、ΔYMAXer=2.0016mmと挿入前の2倍になり、画面上での防振可能な最大像移動量も2倍となり、映像上違和感が生じる。従って、映像上違和感を少なくするためには、(6)式に基づき、エクステンダーIEが挿入されたときの最大振動角θMAXerを2.696≦θ≦4.041としなければならない。
【0046】
そのため、エクステンダーIEが挿入されたときの像ぶれ補正光学系ISの最大変位量ΔSMAXerは、(9)式に基づき0.8≦△SMAXer≦1.2の範囲内でΔSMAXerを制御しなければならない。
次に、図10は、本発明の1つの実施形態である防振ズームレンズ装置とビデ オカメラとから成る、放送用として好適なカメラシステムのブロック図である。
【0047】
図10のカメラシステムは、防振ズームレンズ装置1とビデオカメラ2で構成され、防振ズームレンズ装置1にはCPU28が、ビデオカメラ2にはCPU40が、それぞれ具備されている。ビデオカメラ2のCPU40と防振ズームレンズ装置1のCPU28が、シリアル通信を行うことにより、カメラ−レンズ間の信号の交換が行われる。また、防振ズームレンズ装置1により形成される像は、ビデオカメラ2の画像センサとしてのCCD41に結像され、CCD41から順次電荷が読み出され、この電荷が映像信号処理回路42を通過したあと、映像出力回路43によって映像信号として出力される。
【0048】
防振ズームレンズ装置1には、フォーカス光学系24、ズーム光学系26が存在し、フォーカス光学系24が先に述べた図1の第1群のフォーカスレンズ群Fに、ズーム光学系26が図1の第2群のバリエータVと第3群のコンペンセータCで構成されるレンズ群に、それぞれ相当する。
【0049】
フォーカスレンズ群24にはフォーカス位置センサ25が、ズーム光学系26にはズーム位置センサ27が、それぞれ配置され、フォーカス位置センサ25からの信号はフォーカス位置読み込み用のADコンバータ44でデジタル信号に、ズーム位置センサ27からの信号はズーム位置読み込み用のADコンバータ45でデジタル信号に、それぞれ変換され、CPU28に取り込まれる。このフォーカス位置センサ25、ズーム位置センサ27により、フォーカス光学系24、ズーム光学系26の位置を読み込むことが可能となる。ズーム光学系26の後ろには、像ぶれ補正光学系3があり、図1の第4群リレーレンズ群Rのうちの像ぶれ補正光学系ISに相当する。像ぶれ補正光学系3に対して撮影光軸に垂直な水平方向(ヨー方向)移動用にボイスコイルモータ15、垂直方向(ピッチ方向)移動用にボイスコイルモータ5が設けられている。ヨー方向のボイスコイルモータ15の駆動用にヨーコントロール用のDAコンバータ20及びサーボアンプ19が、ピッチ方向のボイスコイルモータ5の駆動用にピッチコントロール用のDAコンバータ10及びサーボアンプ9が、それぞれ構成されている。
【0050】
像ぶれ補正光学系3がシフトした場合のヨー方向の位置検出用として、ヨー位置検出センサ16が、ピッチ方向の位置検出用として、ピッチ位置検出センサ6が、それぞれ設けられている。
【0051】
また、レンズに加わるヨー方向の振動の検出器としてヨー角速度センサ18、ピッチ方向の振動の検出器としてピッチ角速度センサ8があり、それらの信号をCPU28に読み込むためにヨー方向用フィルタ21、ADコンバータ23、ピッチ用フィルタ11、ADコンバータ13が構成されている。CPU28に取り込まれた角速度を積分演算することにより、変位角が読み込める。
【0052】
ボイスコイルモータ15、ヨー位置検出センサ16及びヨー角速度センサ18はヨー方向制御部14を構成し、ボイスコイルモータ5、ピッチ位置検出センサ6及びピッチ角速度センサ8はピッチ方向制御部4を構成する。
【0053】
次に、像ぶれ補正光学系3の後ろには回転可能なエクステンダー保持部材30が有り、第1のエクステンダー31(変換倍率1x)、第2のエクステンダー32(2x)、第3のエクステンダー33(1.5x)、第4のエクステンダー34(0.8x)の4つが保持され、この中の1つが選択切り替えられて、使用される。ここで選択されたエクステンダーが図1の焦点距離変換光学系IEに相当する。エクステンダーを通った光線は、その後CCD41で結像される。なお、変換倍率2.7倍のエクステンダーをさらに加えること、あるいは、いずれかのエクステンダーと代えることもあり得る。
【0054】
現在、画面の縦、横比にあわせてCCD41の読み出しエリアを変更するカメラシステムが存在し、2/3インチCCDでは縦横比16:9の場合にイメージサークルをφ11mm、4:3の場合にφ9mmのイメージサークルとして読み出しエリアを設定している。この設定では、16:9のCCD41を4:3サイズに横を切り落とす形で実現できる。しかし、これまでφ11のイメージサイズでの縦横比4:3がカメラでの標準であり、基準となるエクステンダーが同じ場合、イメージサイズφ9では、イメージサイズφ11よりもφ11/φ9≒1.2倍拡大された映像となる。これに対応するためにレンズ側で、φ11mmに映っている範囲をφ9mmの中に変換するイメージサイズ変換光学系を用意することにより、システムとしては、φ11イメージサイズの4:3と同等に使用することが可能となる。そこで、本実施形態では、防振ズームレンズ装置1の標準イメージサークルはφ11mmで、基準エクステンダーを第1のエクステンダー31(1x)とする。これに対し、イメージサークルがφ9mmでは、イメージサイズ変換光学系として、基準エクステンダーをφ9/φ11≒0.8xとする必要があり、第4のエクステンダー34(0.8x)を基準とする。ただし、第2のエクステンダー32(2x)、第3のエクステンダー33(1.5x)は、φ11mmのイメージサークルでは、基準の第1のエクステンダー31(1x)に対して、2x、1.5xの変換倍率を保つが、φ9mmのイメージサークルでは、基準の第4のエクステンダー34(0.8x)に対し、2x/0.8x=2.5x、1.5x/0.8x=1.875xのエクステンダーとして作用する。また、φ9mmのイメージサークルでは第1のエクステンダー31(1x)は基準の第4のエクステンダー34(0.8x)に対して、1x/0.8x=1. 25xのエクステンダーとして作用する。
逆に、φ11の場合、第4のエクステンダー34( 0. 8x)を使用すると、映像にケラレがでるために、使用を禁止する。
【0055】
エクステンダー保持部材30を回転駆動するためにモータ36が設けられ、電動でエクステンダーの切り替えを行うことが可能となっている。ビデオカメラ2にはエクステンダーコントロールスイッチ39、イメージサークル切替スイッチ38が備えられており、これらのスイッチ38,39からの入力はCPU40に取り込まれる。CPU40は、防振ズームレンズ装置1のCPU28とシリアル通信によりこのエクステンダー切替信号、イメージサーク切替信号を防振ズームレンズ装置1に伝える。また、第1のエクステンダー31、第2エクステンダー32、第3エクステンダー33、第4エクステンダー34の位置は、エクステンダー位置検出センサ37により検出され、そのエクステンダー位置信号はCPU28に入力される。CPU28はエクステンダー切替信号、イメージサークル切替信号、エクステンダー位置信号に従って駆動アンプ35にエクステンダー切替制御信号を出力し、駆動アンプ35によりモータ36の制御が行われる。
【0056】
CPU28には不揮発性メモリのROM29が接続され、ROM29には角度検出で求めた変位角(振れ角)に対する像ぶれ補正光学系3の補正量(移動量)の算出のための補正係数が、ズーム位置、フォーカス位置によるデータテーブルとして格納されている。また、像ぶれ補正光学系3のヨー方向、ピッチ方向の補正量を演算後に像ぶれ補正光学系3の移動を制限するためのデータテーブルが格納されている。
【0057】
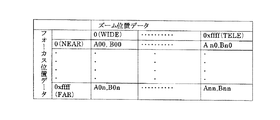
図11が変位角に対する像ぶれ補正光学系3の補正量(移動量)の演算時に使用する補正係数データテーブルである。この補正係数は、任意の焦点距離及び任意の物体距離で演算が可能なように(3)式において、式中のfを任意の焦点距離と任意の物体距離の関数であるC(Z,F)と置き換えた式が成立するように求められた値であり、ヨー方向の変位角に対する像ぶれ補正光学系3の補正係数がAxx(x=0,1,2,・・・,n)、ピッチ方向の変位角に対する像ぶれ補正光学系3の補正係数がBxx(x=0,1,2,・・・,n)となっている。図10のデータテーブルは、ズーム位置データ、フォーカス位置データに対応する補正係数Axx,Bxxで構成されている。ここで、ズーム位置データはズーム位置センサ27からの値を正規化し、広角端(WIDE)を0、望遠端(TELE)を0xffffと16進数表現した値、フォーカス位置データはフォーカス位置センサ25からの値を正規化し、至近端(NEAR)を0、無限端(FAR)を0xffffの16進数表現した値を用いる。
【0058】
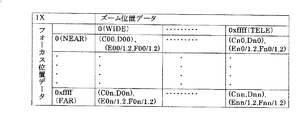
図12〜図15が各エクステンダー挿入時での像ぶれ補正光学系3の移動を制限するための補正量制限データテーブルである。イメージサイズがφ11での像ぶれ補正光学系3のヨー方向の補正量を制限するための制限値データがCxx(x=0,1,2,・・・,n)、像ぶれ補正光学系3のピッチ方向の補正量を制限するための制限値データがDxx(x=0,1,2,・・・,n)である。また、イメージサイズがφ9での像ぶれ補正光学系3のヨー方向の補正量を制限するための制限値データがExx(x=0,1,2,・・・,n)、像ぶれ補正光学系3のピッチ方向の補正量を制限するための制限値データがFxx(x=0,1,2,・・・,n)である。これらCxx,Dxx,Exx,Fxxの値は先に述べた数値実施例を求めた手法から算出した数値である。図12は第1のエクステンダー31(1x)、図13は第2のエクステンダー32(2x)、図14は第3のエクステンダー33(1.5x)、図15は第4のエクステンダー34(0.8x)の補正値制限データテーブルで、ズーム位置データ、フォーカス位置データに対応する像ぶれ補正光学系3の制限値Cxx,Dxx,Exx,Fxxのデータで構成される。ズーム位置データ、フォーカス位置データは、図11と同じ正規化データである。
【0059】
次に、像ぶれ補正光学系3を駆動する補正量算出の概略フローチャートを図16に示す。
【0060】
エクステンダー切替制御信号とエクステンダー位置とが等しいかどうかをチェックし(ステップS1)、等しくなければ、エクステンダー回転切替制御を開始する(ステップS2)。エクステンダーの切替えが終了した後(ステップS3)、角速度センサ8,18から入力した角速度信号を積分演算し(ステップS4)、変位角を求める(ステップS5)。この変位角と、ズーム位置データ、フォーカス位置データにより、図11のデータテーブルの補正係数を用いて像ぶれ補正光学系3の補正量を演算する(ステップS6)。演算で求められた補正量が、図12〜図15のデータテーブルにある制限値をこえた場合に、データテーブルの制限値で補正量に制限をかける(ステップS7)。テーブルデータ間の値は、補間計算をした値を用いる。その後、この制限処理を通った補正量がDAコンバータ10,20に出力される(ステップS8)。
【0061】
上記フローに従い像ぶれ補正光学系3のピッチ方向補正量、ヨー方向補正量を独立して算出する。ピッチ方向補正量は、DAコンバータ10でアナログ値に変換された後、サーボアンプ9に入力される。また、ピッチ位置検出センサ6の出力信号もサーボアンプ9に入力され、補正量とピッチ位置検出センサ6の検出出力との差分信号により像ぶれ補正光学系3のピッチ方向の位置制御が行われる。ヨー方向補正量も同じくDAコンバータ20でアナログ値に変換された後、サーボアンプ19に入力される。また、ヨー位置検出センサ16の出力信号もサーボアンプ19に入力され、補正量とヨー位置検出センサ16の検出出力との差分信号により像ぶれ補正光学系3のヨー方向の位置制御が行われる。
【0062】
(第2の実施形態)
第2の実施形態では、ROM29の図12〜図15に示される補正量制限データテーブルの代わりに、検出角度制限テーブルを持ち、像ぶれ補正光学系3を制御することが、第1の実施形態と異なる。この検出角度制限データテーブルは(5)式に基づいて求められたものである。このデータテーブルを図17に示す。
【0063】
図17に示されるデータテーブルは、イメージサイズφ11で基準エクステンダーである第1のエクステンダー31(1x)の最大検出角度をθ1としたとき、各エクステンダーにおける、イメージサークルφ11、φ9での制限角度値で構成されている。
【0064】
図17の検出角度制限データテーブルを用いた像ぶれ補正光学系3の補正量算出のフローチャートは図18のようになる。エクステンダー切替制御信号とエクステンダー位置とが等しいかどうかをチェックし(ステップS1)し、等しくなければ、エクステンダー回転切替制御を開始する(ステップS2)。エクステンダーの切替えが終了した後(ステップS3)、角速度センサ8,18から入力した角速度信号を積分演算し(ステップS4)、変位角(検出角度)を求める(ステップS5)。この変位角(検出角度)を図17の検出角度制限データテーブルに従い制限をかける(ステップS11)。制限後の検出角度と、ズーム位置データ、フォーカス位置データにより、図11のデータテーブルの補正係数を用いて像ぶれ補正光学系3の補正量を演算する(ステップS12)。演算で求められた補正量がDAコンバータ10,20に出力される(ステップS8)。
【0065】
上記フローに従い像ぶれ補正光学系3のピッチ方向補正量、ヨー方向補正量を独立して算出し、第1の実施形態と同様の制御を行う。
【0066】
【発明の効果】
以上説明したように、本発明によれば、撮影光軸上に挿入される焦点距離変換光学系の変換倍率、又は有無、又はイメージサイズの情報に応じて像ぶれ補正の可能な最大振動角を変化させることで、焦点距離変換光学系が撮影光軸上に挿入されても、画面上での像変化を少なくし、撮影者の違和感を少なくすることができる。
【0067】
また、ズーム位置と、焦点距離変換光学系の変換倍率又は有無とに応じて像ぶれ補正の可能な最大振動角を変化させることで、焦点距離変換光学系が撮影光軸上に挿入されても、それぞれのズーム位置において像ぶれによる撮影者の違和感を少なくすることができる。
【0068】
さらに、例えば、焦点距離変換光学系挿入時の像ぶれ補正可能な最大振動角を、
0.8≦(k×tanθMAXie)/(tanθMAX)≦1.2
の式を満足するようにすることで、特に映像上違和感を少なくすることができる。
【0069】
また、例えば、像ぶれ補正可能な最大振動角を変化させるために、データテーブルを用いることで、容易に所望の最大振動角を求めることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態における光学系部分の広角端無限遠時の配置で、焦点距離変換光学系としてレンズ群が挿入された状態を示すレンズ断面図である。
【図2】本発明の第1の実施形態における光学系部分の広角端無限遠時の配置で、焦点距離変換光学系として空気間隔が挿入された状態を示すレンズ断面図である。
【図3】防振ズームレンズ装置における像ぶれの概念図である。
【図4】本発明の第1の実施形態における数値実施例1を示す図である。
【図5】数値実施例1における焦点距離可変レンズのデータを示す図である。
【図6】数値実施例1の場合の各偏心収差係数を示す図である。
【図7】本発明の第1の実施形態における数値実施例2を示す図である。
【図8】数値実施例2における焦点距離可変レンズのデータを示す図である。
【図9】数値実施例2の場合の各偏心収差係数を示す図である。
【図10】本発明の第1の実施形態であるカメラシステムの構成を示すブロック図である。
【図11】本発明の第1の実施形態における、振動角に対する補正係数のデータテーブルを示す図である。
【図12】本発明の第1の実施形態における、像ぶれ補正光学系を像ぶれ補正のために移動させる量の最大限度を定めるエクステンダー(1x)用のデータテーブルを示す図である。
【図13】本発明の第1の実施形態における、像ぶれ補正光学系を像ぶれ補正のために移動させる量の最大限度を定めるエクステンダー(2x)用のデータテーブルを示す図である。
【図14】本発明の第1の実施形態における、像ぶれ補正光学系を像ぶれ補正のために移動させる量の最大限度を定めるエクステンダー(1.5x)用のデータテーブルを示す図である。
【図15】本発明の第1の実施形態における、像ぶれ補正光学系を像ぶれ補正のために移動させる量の最大限度を定めるエクステンダー(0.8x)用のデータテーブルを示す図である。
【図16】本発明の第1の実施形態における動作制御の概略を示すフローチャートである。
【図17】本発明の第2の実施形態における、像ぶれを生じる振動の検出角度の最大限度を定めるデータテーブルを示す図である。
【図18】本発明の第2の実施形態における動作制御の概略を示すフローチャートである。
【符号の説明】
F フォーカスレンズ群
V バリエータ
C コンペンセータ
R リレーレンズ群
IS 像ぶれ補正光学系
IE 焦点距離変換光学系(エクステンダー)
1 防振ズームレンズ装置
2 ビデオカメラ
3 像ぶれ補正光学系
5,15 ボイスコイルモータ
6 ピッチ位置検出センサ
16 ヨー位置検出センサ
8 ピッチ角速度センサ
18 ヨー角速度センサ
24 フォーカス光学系
25 フォーカス位置センサ
26 ズーム光学系
27 ズーム位置センサ
28,40 CPU
29 ROM
31 第1のエクステンダー(1x)
32 第2のエクステンダー(2x)
33 第3のエクステンダー(1.5x)
34 第4エクステンダー(0.8x)
35 駆動アンプ
36 モータ
37 エクステンダー位置検出センサ
38 イメージサークル切替スイッチ
39 エクステンダーコントロールスイッチ
41 CCD[0001]
BACKGROUND OF THE INVENTION
The present invention corrects image blur caused by vibration due to camera shake or wind, for example, a variable apex prism (variable angle prism, VAP) or a shift lens that moves in a direction perpendicular to the imaging optical axis (of the imaging optical axis). The present invention relates to an anti-vibration zoom lens device and a camera system suitable for a film camera, a television camera, a video camera, and the like, which are performed using an optical image blur correction optical system such as an image blur correction lens moving in the vertical direction.
[0002]
[Prior art]
When the photographing system is shaken due to camera shake or wind vibration, image blur occurs on the image plane. 2. Description of the Related Art Conventionally, various image pickup apparatuses have been proposed in which such image blur is corrected using an image blur correction optical system including a variable apex angle prism, a shift lens, and the like.
[0003]
For example, in Japanese Patent Application Laid-Open No. 61-223819, in a photographing system in which a refractive variable apex angle prism is arranged closest to the subject, the refractive type is adapted to the vibration of the photographing system in which the refractive variable apex angle prism is arranged. The apex angle of the variable apex angle prism is changed to stabilize the image.
[0004]
In Japanese Patent Application Laid-Open Nos. 1-116619 and 2-124521, vibration of the photographing system is detected using an acceleration sensor or the like, and a part of the lens group of the photographing system is moved to the optical axis according to a signal obtained at this time. A method of obtaining a still image by oscillating in a direction orthogonal to the image is performed.
[0005]
In general, the image blur correcting optical system is a shake detecting means such as an angular velocity meter for detecting the shake amount of the photographing system, a control means for calculating the image blur correction amount based on a signal from the shake detecting means, and a signal from the control means. It consists of various elements such as image blur correction driving means for optically or electrically correcting image blur based on the above.
[0006]
[Problems to be solved by the invention]
However, when a focal length conversion optical system (extender) with a conversion magnification of k times is inserted, tan (ω / 2) becomes 1 / k when the angle of view is ω, but the image size does not change. There has been a problem that the maximum amount of image movement that can be shaken on the screen by the blur correction optical system changes k times, giving the photographer a sense of incongruity.
[0007]
(Object of invention)
An object of the present invention is to provide an anti-vibration zoom lens device and a camera system capable of reducing image change on a screen and reducing a sense of discomfort of a photographer even when a focal length conversion optical system is inserted on a photographing optical axis. Is to provide.
[0008]
[Means for Solving the Problems]
In order to solve the above problems, the present invention provides:In an anti-vibration zoom lens apparatus comprising: a zoom optical system; an image blur correction optical system; a control system that controls the image blur correction optical system; and a focal length conversion optical system that can be inserted into and removed from the photographing optical axis. A detecting means for detecting the presence / absence of the focal length conversion optical system inserted on the photographing optical axis, and the control system can correct the image blur according to the detected presence / absence of the focal length conversion optical system. The maximum vibration angle is changed, the control system sets the conversion magnification of the focal length conversion optical system to k, and sets the maximum vibration angle that can correct image blur when the focal length conversion optical system is not inserted to θMAX. When the maximum vibration angle capable of image blurring when the focal length conversion optical system is inserted is θMAXie,
0.8 ≦ (k × tan θMAXie) / (tan θMAX) ≦ 1.2
The image blur correcting optical system is controlled so as to satisfy the above.
[0009]
In addition, the present invention is a camera system including an image stabilization zoom lens device and a camera that performs signal communication with the image stabilization zoom lens device. The anti-vibration zoom lens device includes a zoom optical system, an image blur correction optical system, a control system that controls the image blur correction optical system, and a focal length conversion optical that can be inserted into and removed from the photographing optical axis. An anti-vibration zoom lens device comprising: a detecting means for detecting the presence or absence of the focal length conversion optical system inserted on the photographing optical axis, wherein the control system detects the detected focal length conversion optics When the maximum vibration angle capable of image blur correction is changed according to the presence or absence of the system, the control system sets the conversion magnification of the focal length conversion optical system to k, and the focal length conversion optical system is not inserted When the maximum vibration angle that can be corrected for image blur is θMAX, and the maximum vibration angle that can be corrected for image blur when the focal length converting optical system is inserted is θMAXie,
0.8 ≦ (k × tan θMAXie) / (tan θMAX) ≦ 1.2
The image blur correcting optical system is controlled so as to satisfy the above.
[0010]
DETAILED DESCRIPTION OF THE INVENTION
First, the case where the sub-system in the optical system is decentered in the direction orthogonal to the optical axis is explained from the viewpoint of aberration theory based on the method shown by Matsui at the 23rd Applied Physics Lecture (1962). To do.
[0011]
The aberration amount Δ′Y of the entire system when the partial lens group P of the taking lens is decentered by E is generated by the aberration amount ΔY before decentering and the decentering as shown in the equation (a) in equation (1). And the amount of decentration aberration ΔY (E). Here, as shown in the equation (b), the decentering aberration ΔY (E) is the first order decentering coma aberration (IIE), the first order decentering astigmatism (IIIE), the first order decentering field curvature (PE), 1 Next decentration distortion aberration (VE1), first decentration distortion additional aberration (VE2), and primary origin movement ΔE. In addition, the aberrations from (II) to (ΔE) in the expressions (c) to (h) are incident on the decentered lens group of the paraxial rays on the decentered lens group when the focal length of the entire system is normalized to 1. Angle and exit angle are αp , Αp ′, And the incident angle and the exit angle of the chief ray passing through the pupil center arep ),  ̄ (αp )), The aberration coefficient I of the decentered lens groupp , IIp , IIIp, Pp, Vp And the aberration coefficient I of the lens system on the image side from the decentered lens groupq , IIq , IIIq , Pq , Vq It is expressed using
[0012]
[Expression 1]
Of these, the primary origin movement (ΔE) represents the image movement due to the eccentricity.
[0014]
For example, when an image blur correction optical system that corrects image blur is located on the image side of the zoom lens unit, the image point formed by the zoom lens unit does not change. The coefficients (IIE) to (ΔE) are invariant regardless of zooming.
[0015]
The maximum image movement amount ΔYMAX due to the maximum displacement amount ΔSMAX of the image blur correction optical system is expressed by R = 0, ω = 0, α in the equation (b).k ′ = 1 (R is the entrance pupil diameter, ω is the angle of view, αk ′ Is obtained by the following equation as the converted inclination angle of the on-axis marginal ray.
[0016]
ΔYMAX = − (ΔSMAX × ΔE) / 2 (1)
Further, the maximum image movement amount (image blur amount) ΔYvi accompanying the maximum vibration angle (shake angle) θMAX that can correct the image blur due to the vibration of the photographing system is the following when the object distance is infinity and the focal length is f. It is calculated by the formula.
[0017]
ΔYvi = f × tan θMAX (2)
In order to correct the image blur, the image blur correction optical system IS should be decentered so that the maximum image movement amount ΔYis = −ΔYvi of the image blur correction optical system (IS) is satisfied.
[0018]
ΔYMAX = − (f × tan θMAX) (3)
Next, a case where a focal length conversion optical system (IE) with a conversion magnification of k times is inserted will be described. First, when the focal length conversion optical system IE is closer to the image plane than the image blur correction optical system IS, when the focal length conversion optical system IE is inserted, the focal length f of the entire system is multiplied by k. Further, since the imaging magnification on the object side is k times that of the focal length conversion optical system IE, the primary origin movement (ΔE) of the image blur correction optical system IS is k times.
[0019]
Now, assuming that the maximum image movement amount that can be corrected by the image blur correction optical system IS after insertion of the focal length conversion optical system IE is ΔYMAXer, the maximum image movement amount that can be shaken on the screen is substantially the same as that before the insertion. In order to do this, since the image size does not change, ΔYMAXer≈ΔYMAX must be satisfied. Therefore, when the maximum vibration angle at which vibration can be prevented when the focal length conversion optical system IE is inserted is θMAXer,
(K × f) × tan θMAXer≈f × tan θMAX (4)
Because
(K × tan θMAXer) / (tan θMAX) ≈1 (5)
It is necessary to. However, it is difficult to completely set the left side of equation (5) to 1 in terms of control, and when we evaluated it, it was verified that there was little discomfort on the video if it was within ± 20%. Specifically, it is desirable that the left side of the equation (5) is within the range of the following equation.
[0020]
0.8 ≦ (k × tan θMAXer) / (tan θMAX) ≦ 1.2 (6)
Note that when the zoom position (magnification ratio) of the zoom optical system changes, it is clear that the maximum image movement amount ΔYMAX that can be corrected for image blur changes from equation (3). Of course, not only the conversion magnification k but also the maximum image movement amount ΔYMAX capable of image blur correction is changed not only by the zoom position.
[0021]
In the equation (6), if the upper and lower limits are exceeded, the change in the maximum image movement amount capable of image stabilization before and after the insertion of the focal length conversion optical system IE is large, and the image is uncomfortable and uncomfortable.
[0022]
In order to obtain θMAXer satisfying the expression (6), if the maximum displacement amount of the image blur correction optical system IS when the focal length conversion optical system IE is inserted is ΔSMAXer, (ΔE) becomes k times. Since ΔYMAXer≈ΔYMAX,
(ΔSMAXer × kΔE) / 2≈ (ΔSMAX × ΔE) / 2 (7)
Because
(K × ΔSMAXer) / (ΔSMAX) ≈1 (8)
From the upper and lower limits of equation (6), the range that ΔSMAXer can take is
0.8 ≦ (k × ΔSMAXer) / (ΔSMAX) ≦ 1.2 (9)
It becomes. Accordingly, for example, if the maximum displacement amount ΔSMAX of the image blur correction optical system IS after insertion is set as a data table within a range satisfying the expression (9), and the maximum displacement amount ΔSMAXer of the image blur correction optical system IS after insertion is controlled. Good.
[0023]
Next, when the focal length conversion optical system IE is closer to the object side than the image blur correction optical system IS, the focal length f of the entire system is multiplied by k when the focal length conversion optical system IE is inserted. Since the imaging magnification on the object side from the optical system IE is multiplied by k, the primary origin movement (ΔE) representing the image movement due to the eccentricity of the image blur correction optical system IS located on the image side relative to the focal length conversion optical system IE. Will not change.
[0024]
Now, if the maximum image movement amount that can be corrected by the image blur correction optical system IS after insertion of the focal length conversion optical system IE is ΔYMAXef, the maximum image movement amount that can be shaken on the screen is substantially constant before insertion. In order to do this, since the image size does not change, ΔYMAXef≈ΔYMAX must be satisfied. Therefore, assuming that the maximum vibration-proof vibration angle when the focal length conversion optical system IE is inserted is θMAXef, as in the case where the focal length conversion optical system IE is closer to the image plane than the image blur correction optical system IS. think,
(K × tan θMAXef) / (tanθMAX) ≈1 (10)
It is necessary to. However, it is difficult to completely set the left side of equation (10) to 1 in terms of control, and when we evaluated it, it was verified that there was little discomfort on the video within ± 20%. Specifically, it is desirable that the left side of the equation (10) is within the range of the following equation.
[0025]
0.8 ≦ (k × tan θMAXef) / (tan θMAX) ≦ 1.2 (11)
In the equation (11), if the upper and lower limits are exceeded, the change in the maximum image movement amount capable of image stabilization on the screen before and after the insertion of the focal length conversion optical system IE is large, and the image is uncomfortable and uncomfortable.
[0026]
In order to obtain θMAXef that satisfies the expression (11), if the maximum displacement amount of the image blur optical system IS when the focal length conversion optical system IE is inserted is ΔSMAXef, (ΔE) does not change, ΔYMAXef ≒ ΔYMAX
(ΔSMAXer × ΔE) / 2≈ (ΔSMAX × ΔE) / 2 (12)
Because
△ SMAXer ≒ △ SMAX ... (13)
The range that ΔSMAXef can take from the upper and lower limits of equation (12) is
0.8 ≦ (ΔSMAXef) / (ΔSMAX) ≦ 1.2 (14)
It becomes. Therefore, for example, if the maximum displacement amount ΔSMAXef of the image blur correction optical system IS after insertion is set as a data table within a range satisfying the expression (14), the maximum displacement amount ΔSMAXef of the image blur correction optical system IS after insertion is controlled. Good.
[0027]
Next, the case where the focal length conversion optical system IE is inserted as an image size conversion optical system will be described. First, when the focal length conversion optical system IE is closer to the image plane than the image blur correction optical system IS, when the focal length conversion optical system IE is inserted, the focal length f of the entire system is multiplied by k, and the image size is also increased. multiplied by k. Further, since the imaging magnification on the object side from the focal length conversion optical system IE is multiplied by k, the primary origin movement (ΔE) representing the image movement due to the eccentricity of the image blur correction optical system IS is k times.
[0028]
The maximum image movement amount that can be shaken on the screen is multiplied by k after insertion, so the maximum image movement amount ΔYMAXer that can be corrected by the image blur correction optical system IS after insertion is simply calculated before insertion. Therefore, ΔYMAXer = k × ΔYMAX must be satisfied. Therefore, when the maximum vibration angle at which vibration can be prevented when the focal length conversion optical system IE is inserted is θMAXer,
k × f × tan θMAXer = k × f × tan θMAX (15)
Because
(Tan θMAXer) / (tan θMAX) = 1 (16)
Therefore, it is not necessary to change the maximum vibration angle at which vibration can be prevented before and after insertion of the image size conversion optical system.
[0029]
Next, when the focal length conversion optical system IE is on the object side of the image blur correction optical system IS as an image size conversion optical system, the focal length f of the entire system is multiplied by k when the focal length conversion optical system IE is inserted. The image size is also multiplied by k. Further, since the imaging magnification on the object side is k times that of the focal length conversion optical system IE, the primary movement representing the image movement due to the eccentricity of the image blur correction optical system IS located on the image side of the focal length conversion optical system IE. The origin movement (ΔE) does not change.
[0030]
The maximum image movement amount that can be shaken on the screen is multiplied by k after insertion, so the maximum image movement amount ΔYMAXef that can be corrected by the image blur correction optical system IS after insertion is simply calculated before insertion. Therefore, ΔYMAXef = k × ΔYMAX must be satisfied. Therefore, when the maximum vibration angle at which vibration isolation is possible when the focal length conversion optical system IE is inserted is θMAXef,
k × f × tan θMAXef = k × f × tan θMAX (17)
Because
(Tan θMAXef) / (tan θMAX) = 1 (18)
Therefore, it is not necessary to change the maximum vibration angle at which vibration can be prevented before and after insertion of the image size conversion optical system.
[0031]
The above formulas (1) to (18) describe the case where the object distance is infinite, but in the case of a finite distance, not only the focal length f but also the in-focus state must be taken into account, so C (Z, If F) is a function representing an arbitrary focal position and an arbitrary in-focus state, and f in the equations (1) to (18) is replaced with C (Z, F), it can be established at an arbitrary object distance.
[0032]
Of the expressions (1) to (18), the expressions (1) to (9), (15), and (16) have the image blur correction optical system IS on the object side of the zoom lens unit. It is also true for cases.
[0033]
(First embodiment)
As an example, a case where a focal length conversion optical system (hereinafter referred to as an extender) IE is located on the image plane side with respect to the image blur correction optical system IS will be described with respect to the optical system portion in one embodiment of the present invention.
[0034]
1 and 2 are cross-sectional views showing the lens arrangement of the optical system portion at the wide-angle end at infinity. F is a focus lens group having a positive refractive power as the first group. V is a variator of negative refractive power for zooming as the second group, and zooms from the wide-angle end to the telephoto end by monotonically moving on the imaging optical axis toward the image plane side. C is a third group, which is a compensator having a negative refractive power in FIG. 1 and a positive refractive power in FIG. 2, and in order to correct image plane variation due to zooming, in FIG. In FIG. 2, it moves monotonically on the photographing optical axis toward the object side. The variator V and the compensator C constitute a zoom optical system (a variable magnification moving lens group). SP is an aperture stop, and R is a positive refractive power relay lens group as a fourth group, which is fixed. IS is an image blur correction optical system, and is shown as a shift lens that corrects image blur when the entire system vibrates by moving in a plane substantially perpendicular to the photographing optical axis. IE is an extender, and the focal length of the entire system can be shifted to the telephoto side or the wide angle side by switching to a predetermined other lens group in FIG. 1 and inserting it at a predetermined air interval in FIG. . P is a color separation optical system, an optical filter, or the like, and is shown as a glass block in FIGS.
[0035]
FIG. 3 is a conceptual diagram of image blur accompanying vibration of the photographing optical system. In FIG. 3, y00 is the half field, y0 is the image height corresponding to the half field y00, OBJ is the object distance from the front lens surface, c1 is the entrance pupil position, and t1 is the entrance pupil position c1 from the front lens surface. Ω is a half angle of view, c2 is the rotation center of vibration of the entire photographing optical system, v1 is the distance from the front lens surface to the rotation center of vibration, θ is the vibration angle, and L is from the focused object. A distance to the rotation center c2 of the vibration, Δy00, is a moving amount of the photographing optical axis on the object.
[0036]
As shown in FIG. 3, the vibration angle θ is a tilt angle around the vibration center c2, and the distance v1 from the front lens surface to the vibration center and the vibration angle θ are used to detect vibration. It can be obtained using. The distance v1 can be assumed to be substantially constant when the photographing optical system is supported by a tripod base or the like, and can be handled as a given constant.
[0037]
<Numerical Example 1>
As an example, FIG. 4 shows a numerical example 1 of the optical system shown in FIG. The extender IE can shift the focal length of the entire system to the telephoto side or the wide-angle side by exclusively switching from r29 to r32.
[0038]
ri is the radius of curvature of the i-th lens surface in order from the object side, di is the lens thickness or air gap of the i-th lens surface in order from the object side, and ni and vi are the respective i-th lens in order from the object side. The refractive index and Abbe number of the material.
[0039]
d10, d18, and d21 are variable. Each numerical value when the focal length is 8.50, 51.00, 127.50 is shown in FIG.
[0040]
The eleventh surface (r11) and the eighteenth surface (r18) are aspherical surfaces. The aspherical shape is the X axis in the optical axis direction, the H axis in the direction perpendicular to the optical axis, and the light traveling direction is positive. R is the paraxial radius of curvature, that is, the radius of the reference spherical surface, k, B, C, D, E. When each aspheric coefficient is used, it is expressed by the following equation.
[0041]
R11 surface
Reference spherical surface R = 78.91221
Aspheric coefficient
k = −3.223637 × 10-2
B = 3.221318 × 10-6
C = -3.97113 × 10-9
D = −1.48889 × 10-11
E = 3.06352 × 10-14
R18 surface
Reference spherical surface R = 133.16287
Aspheric coefficient
k = -3.66073 × 10-2
B = −1.07011 × 10-7
C = 9.22594 × 10-9
D = −1.68952 × 10-Ten
E = 4.38262 × 10-13
FIG. 6 shows the decentration aberration coefficients corresponding to the equations (c) to (h) at the wide-angle end and the object distance infinity in Numerical Example 1.
[0042]
<Numerical Example 2>
Next, FIG. 7 shows Numerical Example 2 when the extender IE is switched. The conversion magnification is k = 2 times.
[0043]
d10, d18, and d21 are variable. The respective numerical values when the focal lengths are 17.00, 102.00, and 255.00 are shown in FIG. FIG. 9 shows the decentration aberration coefficients corresponding to the equations (c) to (h) at the wide-angle end and the object distance infinity in Numerical Example 2.
[0044]
In Numerical Example 1, the maximum image movement amount ΔYMAX when the maximum displacement amount ΔSMAX of the image blur correction optical system IS is 2 mm is ΔE = −1.0008. Therefore, ΔYMAX = 1.0008 mm from the equation (1). At this time, the maximum vibration angle θMAX is θMAX = 6.715 °.
[0045]
In the numerical example 2 in which the extender IE with the conversion magnification of 2 is inserted, the image size does not change and only the focal length is doubled. Therefore, when θMAX = 6.715 °, the extender IE with the conversion magnification of 2 is inserted. The maximum image movement amount ΔYMAXer that can be corrected later is ΔYMAXer = 2.0016 mm, which is twice that before insertion, and the maximum image movement amount that can be shaken on the screen is also doubled. Therefore, in order to reduce a sense of incongruity on the video, the maximum vibration angle θMAXer when the extender IE is inserted must be set to 2.696 ≦ θ ≦ 4.041 based on the equation (6).
[0046]
Therefore, the maximum displacement amount ΔSMAXer of the image blur correction optical system IS when the extender IE is inserted must be controlled within the range of 0.8 ≦ ΔSMAXer ≦ 1.2 based on the equation (9). .
Next, FIG. 10 is a block diagram of a camera system suitable for broadcasting, which includes an image stabilizing zoom lens device and a video camera according to an embodiment of the present invention.
[0047]
The camera system shown in FIG. 10 includes an image stabilization
[0048]
The anti-vibration
[0049]
A
[0050]
A yaw
[0051]
Further, there is a yaw
[0052]
The
[0053]
Next, there is a rotatable
[0054]
Currently, there is a camera system that changes the readout area of the
On the other hand, in the case of φ11, if the fourth extender 34 (0.8x) is used, the use of the fourth extender 34 (0.8x) is prohibited because it causes vignetting.
[0055]
A
[0056]
A
[0057]
FIG. 11 is a correction coefficient data table used when calculating the correction amount (movement amount) of the image blur correction optical system 3 with respect to the displacement angle. In this equation, f is a function of an arbitrary focal length and an arbitrary object distance in the equation (3) so that calculation can be performed at an arbitrary focal length and an arbitrary object distance. ) And the correction coefficient of the image blur correction optical system 3 with respect to the displacement angle in the yaw direction is Axx (x = 0, 1, 2,..., N), The correction coefficient of the image blur correction optical system 3 with respect to the displacement angle in the pitch direction is Bxx (x = 0, 1, 2,..., N). The data table in FIG. 10 includes correction coefficients Axx and Bxx corresponding to zoom position data and focus position data. Here, the zoom position data is normalized by the value from the
[0058]
12 to 15 are correction amount restriction data tables for restricting movement of the image blur correction optical system 3 when each extender is inserted. The limit value data for limiting the correction amount in the yaw direction of the image blur correction optical system 3 with an image size of φ11 is Cxx (x = 0, 1, 2,..., N), and the image blur correction optical system 3 Limit value data for limiting the correction amount in the pitch direction is Dxx (x = 0, 1, 2,..., N). Further, limit value data for limiting the correction amount in the yaw direction of the image blur correction optical system 3 at the image size φ9 is Exx (x = 0, 1, 2,..., N), and image blur correction optics. Limit value data for limiting the correction amount in the pitch direction of the system 3 is Fxx (x = 0, 1, 2,..., N). These values of Cxx, Dxx, Exx, and Fxx are values calculated from the method for obtaining the numerical examples described above. 12 shows the first extender 31 (1x), FIG. 13 shows the second extender 32 (2x), FIG. 14 shows the third extender 33 (1.5x), and FIG. 15 shows the fourth extender 34 (0.8x). ) Of the correction value limit data table of the image blur correction optical system 3 corresponding to the zoom position data and the focus position data, the limit value Cxx, Dxx, Exx, and Fxx data. The zoom position data and the focus position data are the same normalized data as in FIG.
[0059]
Next, FIG. 16 shows a schematic flowchart of correction amount calculation for driving the image blur correction optical system 3.
[0060]
It is checked whether or not the extender switching control signal is equal to the extender position (step S1). If they are not equal, extender rotation switching control is started (step S2). After the switching of the extender is completed (step S3), the angular velocity signals input from the
[0061]
According to the above flow, the pitch direction correction amount and yaw direction correction amount of the image blur correction optical system 3 are independently calculated. The pitch direction correction amount is converted to an analog value by the
[0062]
(Second Embodiment)
In the second embodiment, instead of the correction amount restriction data table shown in FIGS. 12 to 15 of the
[0063]
The data table shown in FIG. 17 shows the limit angle values in the image circles φ11 and φ9 in each extender when the maximum detection angle of the first extender 31 (1x) as the reference extender is θ1 with the image size φ11. It is configured.
[0064]
FIG. 18 is a flowchart for calculating the correction amount of the image blur correction optical system 3 using the detection angle restriction data table of FIG. It is checked whether or not the extender switching control signal is equal to the extender position (step S1). If they are not equal, extender rotation switching control is started (step S2). After the switching of the extender is completed (step S3), the angular velocity signals input from the
[0065]
According to the above flow, the pitch direction correction amount and the yaw direction correction amount of the image blur correction optical system 3 are independently calculated, and the same control as in the first embodiment is performed.
[0066]
【The invention's effect】
As described above, according to the present invention, the maximum vibration angle at which image blur correction is possible according to the conversion magnification of the focal length conversion optical system inserted on the photographing optical axis, the presence or absence, or the image size information. By changing it, even if the focal length conversion optical system is inserted on the photographing optical axis, the image change on the screen can be reduced, and the photographer can feel uncomfortable.
[0067]
In addition, even if the focal length conversion optical system is inserted on the photographing optical axis by changing the maximum vibration angle at which image blur correction is possible according to the zoom position and the conversion magnification or presence / absence of the focal length conversion optical system. Therefore, it is possible to reduce a sense of incongruity of the photographer due to image blur at each zoom position.
[0068]
Furthermore, for example, the maximum vibration angle capable of image blur correction when the focal length conversion optical system is inserted,
0.8 ≦ (k × tan θMAXie) / (tan θMAX) ≦ 1.2
By satisfying the expression, it is possible to reduce the sense of incongruity especially in the video.
[0069]
Further, for example, a desired maximum vibration angle can be easily obtained by using a data table in order to change the maximum vibration angle at which image blur correction is possible.
[Brief description of the drawings]
FIG. 1 is a lens cross-sectional view showing a state in which a lens group is inserted as a focal length converting optical system in an arrangement at the wide-angle end infinity of an optical system portion in a first embodiment of the present invention.
FIG. 2 is a lens cross-sectional view showing a state in which an air gap is inserted as a focal length conversion optical system in the arrangement of the optical system portion at the wide-angle end infinite distance in the first embodiment of the present invention.
FIG. 3 is a conceptual diagram of image blur in the image stabilizing zoom lens device.
FIG. 4 is a diagram showing a numerical example 1 in the first embodiment of the present invention.
5 is a diagram showing data of a variable focal length lens in Numerical Example 1. FIG.
6 is a diagram showing each decentration aberration coefficient in the case of Numerical Example 1. FIG.
FIG. 7 is a diagram showing a numerical example 2 in the first embodiment of the present invention.
8 is a diagram illustrating data of a variable focal length lens in Numerical Example 2. FIG.
9 is a diagram showing each decentration aberration coefficient in the case of Numerical Example 2. FIG.
FIG. 10 is a block diagram showing a configuration of a camera system according to the first embodiment of the present invention.
FIG. 11 is a diagram showing a data table of correction coefficients for vibration angles in the first embodiment of the present invention.
FIG. 12 is a diagram showing a data table for an extender (1x) that determines the maximum limit of the amount by which the image blur correction optical system is moved for image blur correction in the first embodiment of the present invention.
FIG. 13 is a diagram showing a data table for an extender (2x) that determines the maximum limit of the amount by which the image blur correction optical system is moved for image blur correction in the first embodiment of the present invention.
FIG. 14 is a diagram showing a data table for an extender (1.5x) that determines the maximum limit of the amount by which the image blur correction optical system is moved for image blur correction in the first embodiment of the present invention.
FIG. 15 is a diagram showing a data table for an extender (0.8x) that determines the maximum limit of the amount by which the image blur correction optical system is moved for image blur correction in the first embodiment of the present invention.
FIG. 16 is a flowchart showing an outline of operation control in the first embodiment of the present invention;
FIG. 17 is a diagram illustrating a data table that defines the maximum limit of the detection angle of vibration that causes image blurring in the second exemplary embodiment of the present invention.
FIG. 18 is a flowchart showing an outline of operation control in the second embodiment of the present invention;
[Explanation of symbols]
F Focus lens group
V Variator
C Compensator
R relay lens group
IS image stabilization optical system
IE Focal length conversion optical system (extender)
1. Anti-vibration zoom lens device
2 Video camera
3 Image stabilization optical system
5,15 Voice coil motor
6 Pitch position detection sensor
16 Yaw position detection sensor
8 Pitch angular velocity sensor
18 Yaw angular velocity sensor
24 Focus optical system
25 Focus position sensor
26 Zoom optical system
27 Zoom position sensor
28, 40 CPU
29 ROM
31 First Extender (1x)
32 Second Extender (2x)
33 Third Extender (1.5x)
34 Fourth Extender (0.8x)
35 Drive amplifier
36 motor
37 Extender position detection sensor
38 Image circle selector switch
39 Extender control switch
41 CCD
Claims (3)
前記撮影光軸上に挿入される前記焦点距離変換光学系の有無を検出する検出手段を備え、
前記制御系が、検出された前記焦点距離変換光学系の有無に応じて像ぶれ補正の可能な最大振動角を変化させており、
前記制御系が、前記焦点距離変換光学系の変換倍率をk、前記焦点距離変換光学系が挿入されていない時の像ぶれ補正可能な最大振動角をθMAX、前記焦点距離変換光学系挿入時の像ぶれ補正可能な最大振動角をθMAXieとしたとき、
0.8≦(k×tanθMAXie)/(tanθMAX)≦1.2
を満足するように、前記像ぶれ補正光学系を制御することを特徴とする防振ズームレンズ装置。 A zoom optical system, the image blur correction optical system, a control system for controlling said image blur correction optical system, and the focal-length-changing optical system that is removably inserted into the shooting optical axis, a vibration damping zoom lens device comprising ,
A detection means for detecting the presence or absence of the focal length conversion optical system that is inserted into the photographing optical axis,
The control system changes the maximum vibration angle capable of image blur correction depending on the presence or absence of the detected focal length conversion optical system ,
The control system sets the conversion magnification of the focal length conversion optical system to k, the maximum vibration angle that can correct image blur when the focal length conversion optical system is not inserted, θMAX, and the insertion time of the focal length conversion optical system. When the maximum vibration angle that can correct image blur is θMAXie,
0.8 ≦ (k × tan θMAXie) / (tan θMAX) ≦ 1.2
The image stabilization zoom lens apparatus controls the image blur correction optical system so as to satisfy the above.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000237599A JP4585664B2 (en) | 2000-08-04 | 2000-08-04 | Anti-vibration zoom lens device and camera system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000237599A JP4585664B2 (en) | 2000-08-04 | 2000-08-04 | Anti-vibration zoom lens device and camera system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002049071A JP2002049071A (en) | 2002-02-15 |
| JP2002049071A5 JP2002049071A5 (en) | 2007-09-13 |
| JP4585664B2 true JP4585664B2 (en) | 2010-11-24 |
Family
ID=18729429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000237599A Expired - Fee Related JP4585664B2 (en) | 2000-08-04 | 2000-08-04 | Anti-vibration zoom lens device and camera system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4585664B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4838557B2 (en) * | 2005-09-12 | 2011-12-14 | キヤノン株式会社 | Zoom lens and imaging apparatus having the same |
| JP5530105B2 (en) * | 2009-01-30 | 2014-06-25 | パナソニック株式会社 | Zoom lens system, interchangeable lens device, and camera system |
| JP6101074B2 (en) * | 2012-12-27 | 2017-03-22 | キヤノン株式会社 | Optical apparatus, image blur correction apparatus, imaging apparatus, control method therefor, program, and storage medium |
| JP6137879B2 (en) * | 2013-03-07 | 2017-05-31 | キヤノン株式会社 | Image blur correction device, lens barrel, optical device, and imaging device |
| JP6168827B2 (en) * | 2013-04-15 | 2017-07-26 | キヤノン株式会社 | Image stabilization apparatus and optical apparatus |
| JP6529215B2 (en) * | 2013-11-12 | 2019-06-12 | キヤノン株式会社 | Zoom lens and imaging device having the same |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0566450A (en) * | 1991-09-06 | 1993-03-19 | Canon Inc | Image blurring correction device |
| JPH06133211A (en) * | 1992-10-19 | 1994-05-13 | Canon Inc | Optical device with picture fluctuation correction function |
| JPH07295004A (en) * | 1994-04-28 | 1995-11-10 | Nikon Corp | Shake correction camera |
| JPH07294994A (en) * | 1994-04-28 | 1995-11-10 | Canon Inc | Optical device |
| JPH086087A (en) * | 1994-06-15 | 1996-01-12 | Canon Inc | Controller for preventing image shake |
| JPH11284900A (en) * | 1998-03-30 | 1999-10-15 | Fuji Photo Optical Co Ltd | Shake prevention device for television camera |
-
2000
- 2000-08-04 JP JP2000237599A patent/JP4585664B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0566450A (en) * | 1991-09-06 | 1993-03-19 | Canon Inc | Image blurring correction device |
| JPH06133211A (en) * | 1992-10-19 | 1994-05-13 | Canon Inc | Optical device with picture fluctuation correction function |
| JPH07295004A (en) * | 1994-04-28 | 1995-11-10 | Nikon Corp | Shake correction camera |
| JPH07294994A (en) * | 1994-04-28 | 1995-11-10 | Canon Inc | Optical device |
| JPH086087A (en) * | 1994-06-15 | 1996-01-12 | Canon Inc | Controller for preventing image shake |
| JPH11284900A (en) * | 1998-03-30 | 1999-10-15 | Fuji Photo Optical Co Ltd | Shake prevention device for television camera |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002049071A (en) | 2002-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4217990B2 (en) | Zoom lens and imaging device | |
| JP4324878B2 (en) | Zoom lens system and imaging apparatus | |
| JP2552861B2 (en) | Zoom lens | |
| CN100429548C (en) | Zoom lens system and image pick-up apparatus including same | |
| WO2006090660A1 (en) | Zoom lens system, imaging apparatus and camera | |
| JP3814406B2 (en) | Variable magnification optical system having anti-vibration function and camera having the same | |
| JP2002244037A (en) | Variable power optical system having vibrationproof function and optical equipment using it | |
| JP2560377B2 (en) | Variable magnification optical system with anti-vibration function | |
| WO2010079751A1 (en) | Zoom lens and image pickup apparatus including the zoom lens | |
| JP2007004020A (en) | Zoom lens and imaging apparatus | |
| US11800226B2 (en) | Control apparatus, image pickup apparatus, lens apparatus, control method, and storage medium, that provide an image-stabilization driving amount for a predetermined image point position | |
| CN109844603B (en) | Variable magnification optical system and optical device | |
| JPH01191113A (en) | Variable power optical system with vibration isolating function | |
| JP2621280B2 (en) | Variable power optical system with anti-vibration function | |
| JP4447706B2 (en) | Variable magnification optical system having anti-vibration function and optical apparatus including the same | |
| JP4829445B2 (en) | Zoom lens and optical apparatus having the same | |
| JP4585664B2 (en) | Anti-vibration zoom lens device and camera system | |
| EP2015122A1 (en) | Zoom lens and optical device with the same | |
| JP4095131B2 (en) | Variable magnification optical system having anti-vibration function and imaging apparatus having the same | |
| JP7277288B2 (en) | ZOOM LENS AND IMAGING DEVICE HAVING THE SAME | |
| JP2005148437A (en) | Variable power optical system | |
| CN107544130B (en) | Attachment optical system, image capturing optical system, and image capturing apparatus | |
| JP3927730B2 (en) | Variable magnification optical system with anti-vibration function | |
| JPH10206732A (en) | Switching type variable power optical system | |
| CN112368624A (en) | Variable magnification optical system, optical apparatus, and method for manufacturing variable magnification optical system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070727 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070727 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100608 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100831 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100906 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130910 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |