JP4551192B2 - 振子式レベル検出装置 - Google Patents
振子式レベル検出装置 Download PDFInfo
- Publication number
- JP4551192B2 JP4551192B2 JP2004332767A JP2004332767A JP4551192B2 JP 4551192 B2 JP4551192 B2 JP 4551192B2 JP 2004332767 A JP2004332767 A JP 2004332767A JP 2004332767 A JP2004332767 A JP 2004332767A JP 4551192 B2 JP4551192 B2 JP 4551192B2
- Authority
- JP
- Japan
- Prior art keywords
- blade
- magnetic pole
- electromagnetic coil
- case
- pendulum type
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 81
- 238000005192 partition Methods 0.000 claims description 11
- 230000033001 locomotion Effects 0.000 claims description 7
- 238000009825 accumulation Methods 0.000 claims 2
- 238000000638 solvent extraction Methods 0.000 claims 1
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 6
- 238000012360 testing method Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000000843 powder Substances 0.000 description 4
- 239000011435 rock Substances 0.000 description 4
- 244000145845 chattering Species 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 229910052742 iron Inorganic materials 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000007789 sealing Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 230000001186 cumulative effect Effects 0.000 description 2
- 239000008187 granular material Substances 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 229920001342 Bakelite® Polymers 0.000 description 1
- 241000209140 Triticum Species 0.000 description 1
- 235000021307 Triticum Nutrition 0.000 description 1
- 239000004637 bakelite Substances 0.000 description 1
- 239000004568 cement Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 239000008188 pellet Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images





Landscapes
- Measurement Of Levels Of Liquids Or Fluent Solid Materials (AREA)
Description
しかも、前記駆動機が、磁極体と、前記磁極体との間で磁気力による相対的な揺動運動を発生させる電磁コイルとを有し、前記磁極体と前記電磁コイルとが電気的に絶縁されて機械的に非連結である。この構成によれば、駆動機は、電磁コイルに通電することにより発生する磁界と磁極体との間の磁気的な吸引力および反発力による相対的な揺動運動により羽根を揺動させるので、従来のレベル検出装置が有しているモータおよび比較的多数のギヤを噛み合わせてなる減速機構などを設ける場合に比較して、構造が格段に簡素化され、それに伴って故障の確率が低くなる。
3 被測定物
4 ケース
9 回転軸
11 羽根
14 駆動機
18A〜18H 磁極体
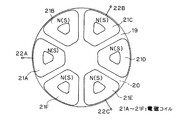
21A〜21F 電磁コイル
29 隔壁
32 レベル検出回路
33 メモリ
34 表示器
θ 揺動角度
Claims (6)
- 揺動中心の回りに揺動する羽根と、
前記羽根を180°未満の揺動角度で揺動させる駆動機と、
前記羽根の揺動角度が所定値以下となったことを検知して羽根に接触する被測定物のレベルを検出するレベル検出回路とを備え、
前記駆動機は、磁極体と、前記磁極体との間で磁気力による相対的な揺動運動を発生させる電磁コイルとを有し、前記磁極体と前記電磁コイルとが電気的に絶縁されて機械的に非連結である、振子式レベル検出装置。 - 請求項1において、前記羽根は、その一端部に前記揺動中心を有している振子式レベル検出装置。
- 請求項1または2において、前記揺動中心に位置して回動する回転軸を有し、
前記回転軸はケースに回動自在に支持され、
前記回転軸における前記ケースから外方に突出した外方部に前記羽根が固定され、
前記回転軸における前記ケースの内方に位置する内端部に前記磁極体が固定されている振子式レベル検出装置。 - 請求項3において、前記ケース内に、前記電磁コイルが配置され、前記磁極体と前記電磁コイルとの間に、前記ケース内の空間を仕切る隔壁が設けられている振子式レベル検出装置。
- 請求項1から4のいずれか一項において、揺動動作の累積時間もしくは累積回数、または前記レベルの検出回数を記憶するメモリと、これらを表示する表示器とを備えた振子式レベル検出装置。
- 請求項1から5のいずれか一項において、前記駆動機の電磁コイルは、パルス信号による制御に基づいて励磁される振子式レベル検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004332767A JP4551192B2 (ja) | 2004-11-17 | 2004-11-17 | 振子式レベル検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004332767A JP4551192B2 (ja) | 2004-11-17 | 2004-11-17 | 振子式レベル検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006145265A JP2006145265A (ja) | 2006-06-08 |
| JP2006145265A5 JP2006145265A5 (ja) | 2007-10-04 |
| JP4551192B2 true JP4551192B2 (ja) | 2010-09-22 |
Family
ID=36625146
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004332767A Active JP4551192B2 (ja) | 2004-11-17 | 2004-11-17 | 振子式レベル検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4551192B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016164560A (ja) * | 2015-03-05 | 2016-09-08 | アンドリッツ インコーポレーテッド | 固体レベル表示器 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110530457B (zh) * | 2018-11-09 | 2024-09-17 | 湖南信量电子有限公司 | 一种用于物体检测的动作机构及物体检测装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2510880Y2 (ja) * | 1992-04-08 | 1996-09-18 | 新生精機株式会社 | 回転翼式レベル計 |
| JP2000287427A (ja) * | 1999-03-31 | 2000-10-13 | Matsushita Electric Ind Co Ltd | ブラシレスモータ |
| JP2001311644A (ja) * | 2000-05-01 | 2001-11-09 | Kansai Ootomeishiyon Kk | 回転式レベル検出装置 |
| JP2004251823A (ja) * | 2003-02-21 | 2004-09-09 | Nohken:Kk | 振動式レベルセンサ |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5447679A (en) * | 1977-09-21 | 1979-04-14 | Hosokawa Micron Kk | Powder level detector |
| JPS618827U (ja) * | 1984-06-20 | 1986-01-20 | 株式会社松井製作所 | 空気制御式レベル計 |
| JPS62123665U (ja) * | 1986-01-28 | 1987-08-06 | ||
| JP2887320B2 (ja) * | 1989-01-24 | 1999-04-26 | 松下電器産業株式会社 | ブラシレスモータの起動方法及び起動装置 |
| JPH10290557A (ja) * | 1997-04-14 | 1998-10-27 | Seiko Instr Inc | 揺動モータ |
-
2004
- 2004-11-17 JP JP2004332767A patent/JP4551192B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2510880Y2 (ja) * | 1992-04-08 | 1996-09-18 | 新生精機株式会社 | 回転翼式レベル計 |
| JP2000287427A (ja) * | 1999-03-31 | 2000-10-13 | Matsushita Electric Ind Co Ltd | ブラシレスモータ |
| JP2001311644A (ja) * | 2000-05-01 | 2001-11-09 | Kansai Ootomeishiyon Kk | 回転式レベル検出装置 |
| JP2004251823A (ja) * | 2003-02-21 | 2004-09-09 | Nohken:Kk | 振動式レベルセンサ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016164560A (ja) * | 2015-03-05 | 2016-09-08 | アンドリッツ インコーポレーテッド | 固体レベル表示器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006145265A (ja) | 2006-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009147778A (ja) | パルス信号発生装置、回転機、制御装置およびパワーウィンド制御装置 | |
| EP2797210A1 (en) | Motor, motor system, and motor encoder | |
| JP2018135908A (ja) | 電動弁 | |
| CN102244449A (zh) | Dc无刷马达 | |
| JP4551192B2 (ja) | 振子式レベル検出装置 | |
| WO2021044758A1 (ja) | 回転検出器及びそれを備えたモータ | |
| CN110955298A (zh) | 便携式电子设备中的磁场传感器 | |
| JP2009168782A5 (ja) | ||
| CN110215972A (zh) | 一种自控速球磨装置及控制方法 | |
| KR102368821B1 (ko) | 전원 모드에 따른 위치 검출 장치 및 이를 이용한 모터 장치 | |
| JP4902032B1 (ja) | 管内移動体探知用の発信器、管内移動体および管内移動体探知システム | |
| TWI428571B (zh) | 擺動式位準偵測裝置 | |
| JP2001141096A (ja) | 電動機およびこれを用いた流体制御弁 | |
| CN101042305B (zh) | 振子式高度水平检测装置 | |
| JP2017143597A (ja) | モータ駆動装置 | |
| JP5184915B2 (ja) | 流量計測装置 | |
| US3820047A (en) | Magnetic annunciator or signal device for control panels | |
| JP4407392B2 (ja) | インパクト工具 | |
| JP2007037230A (ja) | メータ装置のムーブメント | |
| JP4690710B2 (ja) | 減速機構付き電動モータ | |
| JP4273938B2 (ja) | 磁気式エンコーダの位置合わせ装置及び方法 | |
| JP2000221069A (ja) | 流量検出装置 | |
| JP2010025841A (ja) | 流量計測装置 | |
| US20240085072A1 (en) | Control method, control apparatus, and electronic expansion valve | |
| JP2006015286A (ja) | 磁性粒体吸着量検知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070816 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100310 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100603 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100706 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100709 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4551192 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140716 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |