JP4528097B2 - Endoscope device - Google Patents
Endoscope device Download PDFInfo
- Publication number
- JP4528097B2 JP4528097B2 JP2004334524A JP2004334524A JP4528097B2 JP 4528097 B2 JP4528097 B2 JP 4528097B2 JP 2004334524 A JP2004334524 A JP 2004334524A JP 2004334524 A JP2004334524 A JP 2004334524A JP 4528097 B2 JP4528097 B2 JP 4528097B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- bending
- rotating
- bending portion
- transmission mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
本発明は、挿入部の先端側に湾曲部を備えた内視鏡装置に関するものである。 The present invention relates to an endoscope apparatus including a bending portion on the distal end side of an insertion portion.
従来より、体腔内に挿入部を挿入することにより体腔内の臓器を観察したり、必要に応じて処置具チャンネル内に挿入した処置具等を用いて各種治療処置を行う内視鏡が広く利用されている。また工業用分野においても、ボイラ、タービン、エンジン、及び化学プラント等の内部の傷や腐食等を観察したり検査する工業用内視鏡が広く利用されている。このような内視鏡の挿入部の先端側には湾曲部が設けられている。下記特許文献1〜3には、湾曲部に線状部材を接続し、その線状部材を電動モータ等による駆動力によって引くことで湾曲部を上下方向及び左右方向のそれぞれに湾曲する技術の一例が開示されている。
ところが、上記従来技術には以下の課題が存在する。
上記特許文献1に開示されている技術は、2つのモータ及びそれらモータに対応するギアユニット及びプーリを備えた構成であるため、装置の巨大化及び大重量化を招き、操作者に負荷をかける。
However, the following problems exist in the above-described conventional technology.
Since the technique disclosed in
また、上記特許文献2に開示されている技術は、モータ及びギアユニットを挿入部の途中に設けずに床置き式の本体部内に設け、湾曲操作は本体部に接続されている軽量のリモコンで行う構成であるため、挿入時や検査観察時の作業性の劣化は回避されているが、湾曲部とモータとの距離が離れるため、モータと湾曲部とを連結するワイヤが長くなり、摺動抵抗の増加やワイヤの弛みによりモータの駆動力を効率良く湾曲部へ伝達することができなくなる虞がある。その場合、湾曲角度の低下を招くなど望みの湾曲角度を得ることができなかったり、モータの駆動力を上げるためにモータを大型化する必要があるなどの不都合を招く。
The technique disclosed in
また、上記特許文献3に開示されている技術は、レバーの角度でモータの傾斜角度を変えるというメカ的な構造であるため、傾斜角度を保持することが困難となる可能性がある。更に、ローラを摩擦面に押し付ける時間や力量によって湾曲角度が変わってしまう虞があるため、過剰な湾曲あるいは湾曲不足が発生し、湾曲操作等が困難となる可能性がある。 Moreover, since the technique disclosed in Patent Document 3 has a mechanical structure in which the inclination angle of the motor is changed by the lever angle, it may be difficult to maintain the inclination angle. Furthermore, there is a possibility that the bending angle may change depending on the time and force of pressing the roller against the friction surface, so that excessive bending or insufficient bending may occur, and the bending operation may become difficult.
本発明は、このような事情に鑑みてなされたものであって、装置をコンパクト化できるとともに、湾曲部の湾曲性能の劣化を防ぎ、良好な作業性を維持できる内視鏡装置を提供することを目的とする。 The present invention has been made in view of such circumstances, and provides an endoscope apparatus that can downsize the apparatus, prevent deterioration of the bending performance of the bending portion, and maintain good workability. With the goal.
上記の課題を解決するため、本発明の内視鏡装置は、挿入部の先端側に湾曲部を備えた内視鏡装置において、前記湾曲部にその一部を接続し、他部を回転体に接続した線状部材と、駆動源より発生した駆動力を前記回転体に伝達し、前記回転体を回転することにより前記線状部材を駆動して前記湾曲部を湾曲する伝達機構とを備え、前記伝達機構は、前記回転体を第1及び第2の方向の双方に回転可能であるとともに、前記回転体の回転方向を切り替え可能な切替機構を備えたことを特徴とする。 In order to solve the above-described problems, an endoscope apparatus according to the present invention is an endoscope apparatus including a bending portion on a distal end side of an insertion portion, a part of which is connected to the bending portion, and the other portion is a rotating body. And a transmission mechanism that transmits a driving force generated from a driving source to the rotating body and drives the linear member by rotating the rotating body to bend the bending portion. The transmission mechanism includes a switching mechanism capable of rotating the rotating body in both the first and second directions and switching the rotating direction of the rotating body.
本発明によれば、駆動源より発生した駆動力を伝達機構を介して回転体に伝達することができ、切替機構による切り替え動作によって回転体の回転方向を切り替えることができるので、装置のコンパクト化を図りつつ、回転体の回転動作の伴う湾曲部の湾曲動作を良好な作業性で得ることができる。 According to the present invention, the driving force generated from the drive source can be transmitted to the rotating body via the transmission mechanism, and the rotation direction of the rotating body can be switched by the switching operation by the switching mechanism, so that the apparatus can be made compact. Thus, the bending operation of the bending portion accompanying the rotation operation of the rotating body can be obtained with good workability.
本発明の内視鏡装置において、前記湾曲部は、前記回転体の回転方向に応じた方向に湾曲する構成を採用することができる。これにより、切替機構によって回転体の回転方向を切り替えるだけで、回転体の回転方向に応じた方向に湾曲部を湾曲させることができる。 In the endoscope apparatus according to the present invention, the bending portion may be configured to bend in a direction corresponding to a rotation direction of the rotating body. Accordingly, the bending portion can be bent in a direction corresponding to the rotation direction of the rotating body only by switching the rotation direction of the rotating body by the switching mechanism.
本発明の内視鏡装置において、前記線状部材及び該線状部材に対応する前記回転体は、前記湾曲部の目標湾曲方向に応じて複数設けられており、前記伝達機構は、前記駆動源より発生した駆動力を前記複数の回転体のそれぞれに分配する構成を採用することができる。これにより、1つの駆動源によって複数の回転体を回転することができ、装置のコンパクト化を図ることができるとともに、回転体の数に応じた任意の方向に湾曲部を湾曲させることができる。 In the endoscope apparatus according to the present invention, a plurality of the linear members and the rotating bodies corresponding to the linear members are provided according to a target bending direction of the bending portion, and the transmission mechanism includes the drive source A configuration in which the generated driving force is distributed to each of the plurality of rotating bodies can be employed. Thereby, a plurality of rotating bodies can be rotated by one driving source, the apparatus can be made compact, and the bending portion can be bent in an arbitrary direction according to the number of rotating bodies.
本発明の内視鏡装置において、前記湾曲部を上下方向及び左右方向のそれぞれに湾曲可能なように、前記線状部材及び該線状部材に対応する前記回転体は少なくとも2組設けられている構成を採用することができる。これにより、湾曲部を少なくとも上下方向及び左右方向に湾曲させることができる。 In the endoscope apparatus of the present invention, at least two sets of the linear member and the rotating body corresponding to the linear member are provided so that the bending portion can be bent in the vertical direction and the horizontal direction, respectively. A configuration can be employed. Thereby, the bending part can be bent at least in the vertical direction and the horizontal direction.
本発明の内視鏡装置において、前記伝達機構は、前記複数の回転体のそれぞれを略同時に回転可能である構成を採用することができる。これにより、湾曲部を複数の回転体に応じた複数の方向に湾曲させることができる。 In the endoscope apparatus according to the present invention, the transmission mechanism can employ a configuration in which each of the plurality of rotating bodies can be rotated substantially simultaneously. Thereby, the bending part can be bent in a plurality of directions according to the plurality of rotating bodies.
本発明の内視鏡装置において、前記伝達機構は、前記複数の回転体のうち第1の回転体を第1の方向に回転しているときに、第2の回転体を第1又は第2の方向のいずれか一方に回転可能である構成を採用することができる。これにより、湾曲部を、第1の回転体の第1の方向への回転及び第2の回転体の第1の方向への回転に基づく湾曲方向、及び第1の回転体の第1の方向への回転及び第2の回転体の第2の方向への回転に基づく湾曲方向の双方に湾曲させることができる。 In the endoscope apparatus according to the present invention, when the transmission mechanism rotates the first rotating body among the plurality of rotating bodies in the first direction, the transmission mechanism moves the first rotating body to the first or second. It is possible to adopt a configuration that can rotate in either one of the directions. As a result, the bending portion is moved in the bending direction based on the rotation of the first rotating body in the first direction and the rotation of the second rotating body in the first direction, and the first direction of the first rotating body. And the bending direction based on the rotation of the second rotating body in the second direction can be curved.
本発明の内視鏡装置において、前記駆動源はモータを含み、前記伝達機構はギアを含む構成を採用することができる。これにより、モータで発生した駆動力をギアを介して回転体に良好に伝達することができる。 In the endoscope apparatus according to the present invention, it is possible to adopt a configuration in which the drive source includes a motor and the transmission mechanism includes a gear. Thereby, the driving force generated by the motor can be satisfactorily transmitted to the rotating body via the gear.
本発明の内視鏡装置において、前記切替機構は複数のクラッチを含み、前記複数のクラッチのうち特定のクラッチを介して前記駆動力を前記回転体に伝達する構成を採用することができる。これにより、クラッチの操作を行うのみといった簡単な構成で、回転体に対して駆動力を伝達するか否かを選択することができる。そして、特定のクラッチを介して伝達された駆動力(回転力)に応じた方向に回転体を回転することができる。 In the endoscope apparatus according to the present invention, the switching mechanism may include a plurality of clutches, and may adopt a configuration in which the driving force is transmitted to the rotating body via a specific clutch among the plurality of clutches. Thereby, it is possible to select whether or not to transmit the driving force to the rotating body with a simple configuration in which only the operation of the clutch is performed. And a rotary body can be rotated in the direction according to the driving force (rotational force) transmitted via the specific clutch.
本発明の内視鏡装置において、前記回転体を第1の方向に回転するための第1のクラッチと、第2の方向に回転するための第2のクラッチとを有し、前記伝達機構は、前記回転体を第1又は第2の方向のいずれか一方に回転するために、前記第1又は第2のクラッチのいずれか一方を介して前記駆動力を前記回転体に伝達する構成を採用することができる。これにより、第1及び第2のクラッチの一方を選択し、その選択されたクラッチを介して回転体に駆動力を伝達することで、回転体を第1の方向又は第2の方向のいずれか一方に回転することができる。 In the endoscope apparatus according to the present invention, the endoscope includes a first clutch for rotating the rotating body in a first direction and a second clutch for rotating in the second direction, and the transmission mechanism In order to rotate the rotating body in either the first or second direction, a configuration is adopted in which the driving force is transmitted to the rotating body via either the first or second clutch. can do. As a result, one of the first and second clutches is selected, and the driving force is transmitted to the rotating body via the selected clutch, so that the rotating body is either in the first direction or the second direction. Can rotate to one side.
本発明の内視鏡装置において、前記回転体の回転を規制するブレーキを備えた構成を採用することができる。これにより、回転体の回転動作に伴う湾曲部の湾曲動作を規制し、その姿勢を維持することができる。 In the endoscope apparatus according to the present invention, a configuration including a brake that restricts rotation of the rotating body can be employed. Thereby, the bending operation of the bending part accompanying the rotation operation of the rotating body can be restricted, and the posture can be maintained.
本発明の内視鏡装置において、前記回転体の回転角度を検出する検出装置を備えた構成を採用することができる。これにより、回転体の回転角度に応じた湾曲部の湾曲状態を把握することができる。 In the endoscope apparatus of the present invention, it is possible to employ a configuration including a detection device that detects the rotation angle of the rotating body. Thereby, the bending state of the bending part according to the rotation angle of the rotating body can be grasped.
本発明の内視鏡装置において、前記検出装置の検出結果に基づいて、前記回転体の回転角度を制御する制御系を備えた構成を採用することができる。これにより、回転体の回転に伴う湾曲部の湾曲状態を制御することができる。 In the endoscope apparatus of the present invention, it is possible to employ a configuration including a control system that controls the rotation angle of the rotating body based on the detection result of the detection apparatus. Thereby, the bending state of the bending part accompanying rotation of a rotary body is controllable.
本発明によれば、湾曲部の湾曲性能の劣化を防ぎつつ、装置全体をコンパクト化することができ、良好な作業性を維持することができる。 According to the present invention, the entire apparatus can be made compact while preventing deterioration of the bending performance of the bending portion, and good workability can be maintained.
以下、本発明の実施形態について図面を参照しながら説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
<第1の実施形態>
図1は本発明に係る内視鏡装置の第1の実施形態を示す概略構成図である。なお図1においては、内視鏡装置の湾曲機構に係る部分のみを抽出して示しており、その光学系等の図示は省略してある。
<First Embodiment>
FIG. 1 is a schematic configuration diagram showing a first embodiment of an endoscope apparatus according to the present invention. In FIG. 1, only the part related to the bending mechanism of the endoscope apparatus is extracted and shown, and the optical system and the like are not shown.
図1において、内視鏡装置1は、挿入部2と、挿入部2の先端側に設けられた湾曲部10と、湾曲部10を駆動する駆動装置3とを備えている。駆動装置3は、挿入部2の基端側に設けられている。駆動装置3はユニバーサルコード4を介して本体装置(制御系)5に接続されている。本体装置5は、湾曲部10の湾曲動作を制御する制御系を構成しており、制御基板21、電源22、モニタ23、及びドライブ基板24等を備えている。また、制御基板21には、操作リモコン7で構成された操作部6が接続されている。操作リモコン7には湾曲部10の湾曲動作を遠隔操作する操作スイッチ8が設けられている。
In FIG. 1, the
挿入部2は、基端側の可撓管部9と、可撓管部9の先端側に設けられた湾曲部10とを備えており、これらは互いに連結されている。そして、湾曲部10の先端部11には、複数のワイヤ(線状部材)12(12a、12b)、13(13a、13b)のそれぞれの一端部が接続されている。ワイヤ12a、12bの一端部は、湾曲部10の先端部11の端面(先端面)において、互いに対向するように固定されている。本実施形態においては、ワイヤ12a、12bの一端部は、上下方向に並ぶように先端部11に固定されている。また、ワイヤ13a、13bの一端部も、湾曲部10の先端部11において、互いに対向するように固定されている。ワイヤ13a、13bの一端部は、左右方向に並ぶように先端部11に固定されている。すなわち、先端部11において、ワイヤ12a、12bの並び方向とワイヤ13a、13bの並び方向とは互いに略直交している。
The
ワイヤ12a、12bはシース14a、14bの内側に配置された状態で、湾曲部10及び可撓管部9の内側に配置されている。そして、ワイヤ12a、12bの他端部は、プーリによって構成された回転体15に接続されている。具体的には、ワイヤ12a、12bの他端側は回転体15に巻き取られて接続(固定)されている。同様に、ワイヤ13a、13bもシース14c、14dの内側に配置された状態で、湾曲部10及び可撓管部9の内側に配置されている。そして、ワイヤ13a、13bの他端部は、プーリからなる回転体16に接続されている。
The
駆動装置3は、上記回転体15、16と、駆動源であるモータ18と、モータ18より発生した駆動力を回転体15、16に伝達し、回転体15、16を回転することによってワイヤ12a、12b、13a、13bを駆動して湾曲部10を湾曲する伝達機構(ギアユニット)17とを備えている。モータ18はユニバーサルコード4を介して本体装置5のドライブ基板24に接続されている。操作スイッチ8より入力された湾曲のための信号は、制御基板21を介してドライブ基板24に入力される。ドライブ基板24は、入力された信号に応じてモータ18を駆動する。モータ18で発生した駆動力は、伝達機構17を介して回転体15、16に伝達される。回転体15、16は、伝達機構17を介して伝達されたモータ18の駆動力に基づいて回転する。伝達機構17を含む駆動装置3の動作は、制御系としての本体装置5に制御されるようになっている。また、伝達機構17を含む駆動装置3は、電源22を備える本体装置5から供給される電力によって駆動する。また、伝達機構17を含む駆動装置3は、操作部6から入力された入力信号に基づいて動作する。
The driving device 3 transmits the driving force generated by the rotating
本体装置5の制御の下で、回転体15が回転すると、その回転体15に巻き付けられて固定されているワイヤ12a、12bが駆動される。具体的には、回転体15が回転すると、ワイヤ12a及びワイヤ12bのいずれか一方は回転体15に引かれ、他方は回転体15より繰り出される。例えばワイヤ12a、12bのうちワイヤ12aが引かれると、そのワイヤ12aの先端部に接続されている湾曲部10も引かれてワイヤ12a側に湾曲する。一方、ワイヤ12bが引かれると、そのワイヤ12bの先端部に接続されている湾曲部10も引かれてワイヤ12b側に湾曲する。同様に、回転体16が回転すると、その回転体16に巻き付けられて固定されているワイヤ13a、13bのいずれか一方は回転体16に引かれ、他方は回転体16より繰り出される。例えばワイヤ13a、13bのうちワイヤ13aが引かれると、そのワイヤ13aの先端部に接続されている湾曲部10も引かれてワイヤ13a側に湾曲する。一方、ワイヤ13bが引かれると、そのワイヤ13bの先端部に接続されている湾曲部10も引かれてワイヤ13b側に湾曲する。
When the
ここで、上述したように、ワイヤ12a、12bの一端部は、湾曲部10の先端部11において上下方向に並んで設けられているため、ワイヤ12aが引かれると湾曲部10は上方向Uに湾曲し、ワイヤ12bが引かれると湾曲部10は下方向Dに湾曲する。同様に、ワイヤ13aが引かれると湾曲部10は右方向Rに湾曲し、ワイヤ13bが引かれると湾曲部10は左方向Lに湾曲する。このように、湾曲部10の目標湾曲方向(上下方向及び左右方向)に応じて、ワイヤ及びそのワイヤに対応する回転体は複数(本実施形態では2組)設けられている。本実施形態においては、内視鏡装置1は、湾曲部10を上下方向に湾曲可能なワイヤ12(12a、12b)及びそのワイヤ12に対応する回転体15と、湾曲部10を左右方向に湾曲可能なワイヤ13(13a、13b)とそのワイヤ13に対応する回転体16とを備えた構成となっている。
Here, as described above, the one end portions of the
図2は、駆動装置3を示す構成図である。モータ18は、1方向のみに回転可能なモータであり、伝達機構17に接続されている。伝達機構17は、モータ18に接続された回転軸30と、複数のギア31(31a、31b)〜38(38a、38b)と、クラッチ39(39a、39b)、40(40a、40b)と、ブレーキ41(41a、41b)とを備えている。伝達機構17は、複数のギアによって、モータ18より発生した回転力を回転体15、16に伝達するとともに、回転数を減遠させてトルクを増大させており、小型モータで大きな回転力を得られるように構成されている。モータ18の駆動やクラッチ39、40の駆動(接続・離間)、ブレーキ41の動作は、本体装置5の制御の下で行われる。また、モータ18、クラッチ39、40、ブレーキ41は、本体装置5から供給される電力によって駆動する。
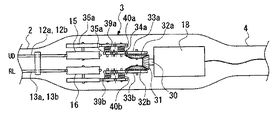
FIG. 2 is a configuration diagram showing the driving device 3. The
伝達機構17は、モータ18より発生した駆動力を、湾曲部10を上下方向に湾曲させるための回転体15と、左右方向に湾曲させるための回転体16とのそれぞれに分配するように設けられている。モータ18が駆動してそのモータ18に接続している駆動軸30が回転すると、モータ18の回転力は、ギア31a〜38aを介して回転体15に伝達されるとともに、ギア31b〜38bを介して回転体16に伝達される。
The
図3は、各クラッチ39a、39b、40a、40bの接続・離間状態と回転体15、16の回転方向と湾曲方向を示す図である。以下、4つのクラッチ39a、39b、40a、40bの接続・離間状態と湾曲部10の湾曲方向との関係を説明する。クラッチ39a、39b、40a、40bは、回転体15、16の回転方向を切り替える切替機構として機能し、本実施形態においては、複数のクラッチ39a、39b、40a、40bのうち、特定のクラッチを介してモータ18より発生した駆動力を回転体15、16に伝達することにより、湾曲部10を湾曲する。
FIG. 3 is a diagram showing the connected / separated state of each of the
上述したように、モータ18は1方向のみ回転可能なモータである。したがって、モータ18が回転すると、そのモータ18に接続している駆動軸30が回転し、その駆動軸30を回転中心としてギア31が図2の矢印で示すように決まった方向に回転し、そのギア31の回転に伴って、各ギア32a、32b、33a、33b、34a、34b、35a、35bが、図2の矢印で示すように決まった方向(+θ)に回転する。
As described above, the
例えば、モータ18の駆動によって駆動軸30に固定されたギア31が図2中、+θ方向に回転すると、そのギア31aの回転に伴って、ギア32a及びそのギア32aよりも小径なギア33aが−θ方向に回転する。そのギア33aの回転に伴って、ギア34aが+θ方向に回転するとともに、そのギア34aにかみ合っているギア35aが−θ方向に回転する。
For example, when the
ギア34aにはクラッチ40aの原動軸が固定されており、クラッチ40aの原動軸側と従動軸側とが接続すると、従動軸に固定されているギア37aがギア34aの回転に伴って+θ方向に回転する。このとき、クラッチ39aは離間している。そのギア37aの回転に伴って、回転体15の回転軸15Aに固定されているギア36aが、小径のギア38aの回転を介して、+θ方向に回転する。そして、ギア36aの回転に伴って、回転体15は+θ方向に回転する。すなわち、クラッチ40aが接続すると、回転体15は+θ方向に回転する。一方、クラッチ40aの原動軸側と従動軸側との接続が解除(すなわち離間)されると、ギア34aの回転力はギア37aには伝達されない。
The driving shaft of the clutch 40a is fixed to the
同様に、ギア35aにはクラッチ39aの原動軸が固定されており、クラッチ39aの原動軸側と従動軸側とが接続すると、従動軸に固定されているギア36aがギア35aの回転に伴って−θ方向に回転する。このとき、クラッチ40aは離間している。そのギア35aの回転に伴って、回転体15の回転軸15Aに固定されているギア36aが、−θ方向に回転する。そして、ギア36aの回転に伴って、回転体15は−θ方向に回転する。すなわち、クラッチ39aが接続すると、回転体15は−θ方向に回転する。一方、クラッチ39aの原動軸側と従動軸側との接続が解除(すなわち離間)されると、ギア35aの回転力はギア37aには伝達されない。
Similarly, the driving shaft of the clutch 39a is fixed to the
このように、クラッチ39a、40aのうち、クラッチ39aのみを接続させた場合には、ギア36aは35aと同じ方向に回転し、したがって回転体15がa方向(−θ方向)に回転する。すなわちクラッチ39aは、回転体15をa方向に回転するためのクラッチを構成している。その回転体15のa方向への回転に伴って、ワイヤ12aが引かれ、そのワイヤ12aの移動に伴って、湾曲部10は上方向Uに湾曲する。一方、クラッチ39aの接続を解除し、クラッチ40aのみを接続させると、回転体15がb方向(+θ方向)に回転する。すなわちクラッチ40aは、回転体15をb方向に回転するためのクラッチを構成している。その回転体15のb方向への回転に伴って、ワイヤ12bが引かれ、そのワイヤ12bの移動に伴って、湾曲部10は下方向Dに湾曲する。
Thus, when only the clutch 39a is connected among the
このように、伝達機構17は、回転体15をa方向及びb方向のそれぞれに回転可能であるとともに、クラッチ39a、40aの接続・離間を行うことで、回転体15の回転方向を切り替えることができる。そして、伝達機構17が、回転体15をa方向又はb方向のいずれか一方に回転するために、クラッチ39a又はクラッチ40aのいずれか一方を介して、モータ18より発生した駆動力を回転体15に伝達することにより、湾曲部10は、回転体15の回転方向に応じた方向に湾曲することができる。
As described above, the
同様に、伝達機構17は、回転体16を図2中、c方向及びd方向の双方に回転可能であるとともに、クラッチ39b、40bの接続・離間によって、回転体16の回転方向を切り替え可能となっている。すなわち、クラッチ39bが接続すると、回転体16(回転軸16A)はc方向に回転し、その回転体16のc方向への回転に伴って、ワイヤ13aが引かれ、湾曲部10は右方向Rに湾曲する。一方、クラッチ40bが接続すると、回転体16はd方向に回転し、その回転体16のd方向への回転に伴って、ワイヤ13bが引かれ、湾曲部10は左方向Lに湾曲する。
Similarly, the
また、伝達機構17は、本体装置5の制御の下で、4つのクラッチ39a、39b、40a、40bのそれぞれを互いに独立して接続・離間可能であり、回転体15、16を同時に回転可能である。そして、例えばクラッチ39aとクラッチ39bを同時に接続し、回転体15をa方向に回転しているときに、回転体16をc方向に回転することで、湾曲部10を右上方向に湾曲させることができる。あるいは、クラッチ39aとクラッチ40bを同時に接続し、回転体15をa方向に回転しているときに、回転体16をd方向に回転することで、湾曲部10を左上方向に湾曲させることができる。
Further, the
また、それぞれのクラッチ39a、39bと回転体15、16の間、具体的には回転軸15A、16Aには、回転体15、16の回転を規制するためのブレーキ41(41a、41b)が設けられている。ブレーキ41a、41bは電磁ブレーキによって構成されており、本体装置5から供給される電力で駆動し、本体装置5によりその駆動を制御される。湾曲部10を目標湾曲角度に湾曲させてその湾曲状態を維持したい場合、電磁ブレーキ41a、41bにより回転体15、16の回転を規制(ロック)することで、湾曲部10の湾曲状態(湾曲角度)を保持することができる。また、ある湾曲状態から、回転体15、16のうちどちらか一方の回転体だけを回転させたい場合にも、回転させたくない他方の回転体の回転を電磁ブレーキで規制(ロック)することができる。このように、ブレーキによって湾曲部10の湾曲状態を保持することができ、ブレーキとクラッチとの切り替えを電動で瞬時に行うことにより、湾曲角度の微小調整も可能となる。
Further, a brake 41 (41a, 41b) for restricting the rotation of the
また、本実施形態においては、クラッチ39a、39bと回転体15、16との間、具体的には回転軸15A、16Aには、回転体15、16の回転角度を検出するためのポテンショメータ42(42a、42b)が設けられている。ポテンショメータ42a、42bにより、回転体15、16の絶対回転角度を検出することができる。ポテンショメータ42a、42bの検出結果は本体装置5に出力される。湾曲部10の湾曲角度は回転体15、16の回転角度に基づいて規定されるため、本体装置5は、ポテンショメータ42a、42bの検出結果に基づいて、湾曲部10の湾曲状態を把握することができる。また、ポテンショメータ42a、42bの検出結果に基づいて、本体装置5が回転体15、16の回転角度を制御することにより、湾曲部10の湾曲角度を強制的にセンタリングさせたり、必要以上に湾曲をさせないように湾曲角度制限を設けたり、数値入力で湾曲角度を設定することができる。
In the present embodiment, a potentiometer 42 (for detecting the rotation angle of the
以上説明したように、1台のモータ18で、しかも1方向のみに回転するモータ18によって湾曲部10を上下方向、左右方向、更には傾斜方向(右上方向や左上方向など)へ湾曲することができる。そして、伝達機構17を含む駆動装置3をコンパクト化することができ、挿入部2の基端側に小型の駆動装置3を設ける構成を採用することも可能となる。また、装置の巨大化・大重量化に伴う作業性の劣化等を抑制することができるので、操作者は、内視鏡装置1を使った作業を長時間良好に行うことができる。また、モータ18を1台にしたことで、騒音を減少できる効果を得ることもできる。
As described above, the bending
また、本実施形態においては、回転体15、16の回転制御を電動で行っており、しかもその制御を回転体15、16のそれぞれに対して独立して行っているので、湾曲部10を望みの方向に望みの角度で円滑に素早く湾曲することができ、湾曲部10(挿入部2)を被検体に挿入するときの作業性を格段に向上することができる。更に、本体装置5と駆動装置3とを分けた構成であるため、不必要にワイヤが長くならず、望みの湾曲角度を得ることができる。また、湾曲部10の湾曲状態の制御を電動で行っているため、操作者が操作部6の操作スイッチ8を押す力の加減を気にしたり、微小角度の調整がし難い等といった不都合を抑え、高い操作性を得ることができる。
Further, in the present embodiment, the rotation control of the
更に、伝達機構17は、クラッチとブレーキとを備えているので、湾曲部10の湾曲状態を保持するとき、モータ18に電力を供給し続けなくても、湾曲状態を保持することができる。したがって、低消費電力化を図ることができる。また、挿入部2を被検体に挿入中に異常事態が発生した場合、湾曲部10の湾曲状態を開放することが必要となる場合があるが、異常事態が発生したときには、クラッチの接続やブレーキによるロックを解除するだけで、湾曲部10をフリー状態にすることができ、従来の電動湾曲式モータ動作で行っていた予備電力で湾曲を戻すといった制御を必要としないため、非常時用の充電コンデンサを回路内に搭載しておく必要も無くなる。
Furthermore, since the
<第2の実施形態>
図4は第2の実施形態に係る駆動装置3を上方から見た図、図5は図4の側断面図である。なお、以下の説明において、上述した第1の実施形態と同一又は同等の構成部分については同一の符号を付し、その説明を簡略もしくは省略する。図4及び図5において、モータ18には細径のものが用いられており、ギアにはかさ歯車が用いられている。このような構成を採用することにより、挿入部2の外径と同等もしくは若干太めになる程度で駆動装置3(伝達機構17)を構成することができる。そして、駆動装置3と挿入部2の基端とを近づけることができるので、ワイヤを短くし、摺動抵抗やワイヤの弛みを最小限に抑えることができるため、モータ18の駆動力は小さくて済む。また、モータ18を小型化し、あるいは減速ギアを省略することで、駆動装置3(伝達機構17)全体のコンパクト化を図ることができる。
<Second Embodiment>
4 is a view of the driving device 3 according to the second embodiment as viewed from above, and FIG. 5 is a side sectional view of FIG. In the following description, the same or equivalent components as those in the first embodiment described above are denoted by the same reference numerals, and the description thereof is simplified or omitted. 4 and 5, the
1…内視鏡装置、2…挿入部、3…駆動装置、5…本体装置(制御系)、10…湾曲部、11…先端部、12(12a、12b)…ワイヤ(線状部材)、13(13a、13b)…ワイヤ(線状部材)、15…回転体、16…回転体、17…伝達機構、18…モータ(駆動源)、31〜38(31a〜38a)…ギア、39(39a、39b)、40(40a、40b)…クラッチ(切替機構)、41(41a、41b)…ブレーキ、42(42a、42b)…ポテンショメータ(検出装置)
DESCRIPTION OF
Claims (5)
前記湾曲部にその一部を接続し、他部を回転体に接続した線状部材と、
駆動源より発生した駆動力を前記回転体に伝達し、前記回転体を回転することにより前記線状部材を駆動して前記湾曲部を湾曲する伝達機構とを備え、
前記伝達機構は、前記回転体を第1及び第2の方向の双方に回転可能であるとともに、前記回転体の回転方向を切り替え可能な切替機構を備えたことを特徴とする内視鏡装置。 In an endoscope apparatus provided with a bending portion on the distal end side of the insertion portion,
A linear member having a part connected to the curved part and the other part connected to the rotating body;
A transmission mechanism that transmits a driving force generated from a drive source to the rotating body, drives the linear member by rotating the rotating body, and curves the bending portion;
The transmission mechanism, together with the rotating body is rotatable in both the first and second directions, the endoscope apparatus characterized by comprising a possible switching mechanism switches the rotational direction of the rotating body.
前記伝達機構は、前記駆動源より発生した駆動力を前記複数の回転体のそれぞれに分配することを特徴とする請求項1又は2に記載の内視鏡装置。 A plurality of the linear members and the rotating bodies corresponding to the linear members are provided according to a target bending direction of the bending portion,
The transmission mechanism, the endoscope apparatus according to claim 1 or 2, characterized in that for distributing the driving force generated from the driving source to each of the plurality of rotating bodies.
The endoscope apparatus according to claim 3 or 4 , wherein the transmission mechanism is capable of rotating each of the plurality of rotating bodies substantially simultaneously.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004334524A JP4528097B2 (en) | 2004-11-18 | 2004-11-18 | Endoscope device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004334524A JP4528097B2 (en) | 2004-11-18 | 2004-11-18 | Endoscope device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006141624A JP2006141624A (en) | 2006-06-08 |
| JP2006141624A5 JP2006141624A5 (en) | 2008-01-10 |
| JP4528097B2 true JP4528097B2 (en) | 2010-08-18 |
Family
ID=36621961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004334524A Expired - Fee Related JP4528097B2 (en) | 2004-11-18 | 2004-11-18 | Endoscope device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4528097B2 (en) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8439828B2 (en) | 2006-01-13 | 2013-05-14 | Olympus Medical Systems Corp. | Treatment endoscope |
| US8617054B2 (en) | 2006-01-13 | 2013-12-31 | Olympus Medical Systems Corp. | Medical treatment endoscope |
| US9289112B2 (en) | 2006-01-13 | 2016-03-22 | Olympus Corporation | Medical treatment endoscope having an operation stick formed to allow a procedure instrument to pass |
| US9173550B2 (en) | 2006-01-13 | 2015-11-03 | Olympus Corporation | Medical apparatus |
| US9308049B2 (en) | 2006-01-13 | 2016-04-12 | Olympus Corporation | Medical treatment endoscope |
| US8556805B2 (en) * | 2006-01-13 | 2013-10-15 | Olympus Medical Systems Corp. | Rotational force transmission mechanism, force-attenuating apparatus, medical device, and medical instrument-operation mechanism |
| JP2007333601A (en) * | 2006-06-15 | 2007-12-27 | Nuclear Fuel Ind Ltd | Fuel inspection device |
| EP2820999A4 (en) * | 2012-02-27 | 2015-11-25 | Olympus Corp | Endoscope |
| WO2014133180A1 (en) | 2013-02-27 | 2014-09-04 | Olympus Corporation | Manipulator |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3093804B2 (en) * | 1991-02-12 | 2000-10-03 | オリンパス光学工業株式会社 | Endoscope |
| JP3673157B2 (en) * | 2000-09-05 | 2005-07-20 | オリンパス株式会社 | Electric angle type electronic endoscope device |
| JP4311994B2 (en) * | 2002-09-30 | 2009-08-12 | オリンパス株式会社 | Electric bending endoscope |
-
2004
- 2004-11-18 JP JP2004334524A patent/JP4528097B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006141624A (en) | 2006-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10085624B2 (en) | Manipulator and manipulator system | |
| US10085612B2 (en) | Manipulator and manipulator system | |
| CN104755041B (en) | Self-antagonistic drive for medical instruments | |
| EP2671499B1 (en) | Endoscope | |
| EP2229868B1 (en) | Endoscope | |
| CN101610709B (en) | Multi-joint bending mechanism and multi-joint medical device with multi-joint bending mechanism | |
| JP6064100B1 (en) | Manipulator and manipulator system | |
| EP3103374A1 (en) | Traction balance adjustment mechanism, manipulator, and manipulator system | |
| JP5331507B2 (en) | Endoscope | |
| EP2098159A1 (en) | Endoscope | |
| US9550293B2 (en) | Manipulator | |
| US20070004967A1 (en) | Endoscope | |
| JP4528097B2 (en) | Endoscope device | |
| EP3263291A1 (en) | Operation input device and medical manipulator system | |
| JP2003325437A (en) | Tractive member operating device | |
| US10194786B2 (en) | Insertion device | |
| JP2021502156A (en) | Endoscopy system | |
| US12121314B2 (en) | Manipulator system, and control method of manipulator system | |
| JP2006061176A (en) | Bending device | |
| JP3176671B2 (en) | Electric curved endoscope device | |
| JP5049824B2 (en) | Endoscope | |
| US20210100430A1 (en) | Driving force transmission mechanism for endoscope and endoscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100506 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100604 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4528097 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |