JP4477909B2 - 眼鏡装用シミュレーションシステム、および画像生成方法 - Google Patents
眼鏡装用シミュレーションシステム、および画像生成方法 Download PDFInfo
- Publication number
- JP4477909B2 JP4477909B2 JP2004079399A JP2004079399A JP4477909B2 JP 4477909 B2 JP4477909 B2 JP 4477909B2 JP 2004079399 A JP2004079399 A JP 2004079399A JP 2004079399 A JP2004079399 A JP 2004079399A JP 4477909 B2 JP4477909 B2 JP 4477909B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- optical system
- simulation
- observation optical
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000004088 simulation Methods 0.000 title claims description 124
- 238000000034 method Methods 0.000 title claims description 55
- 239000011521 glass Substances 0.000 title claims description 8
- 230000003287 optical effect Effects 0.000 claims description 155
- 238000012545 processing Methods 0.000 claims description 59
- 230000006870 function Effects 0.000 claims description 21
- 230000004075 alteration Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 7
- 230000000750 progressive effect Effects 0.000 claims description 7
- 230000004418 eye rotation Effects 0.000 claims description 2
- 238000013461 design Methods 0.000 description 16
- 210000001508 eye Anatomy 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000012360 testing method Methods 0.000 description 4
- 201000009310 astigmatism Diseases 0.000 description 2
- 239000000872 buffer Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 241000226585 Antennaria plantaginifolia Species 0.000 description 1
- 238000012935 Averaging Methods 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 201000010041 presbyopia Diseases 0.000 description 1
Images




Landscapes
- Eyeglasses (AREA)
- Eye Examination Apparatus (AREA)
Description
x'=f(x'',y'')・・・(1)
y'=g(x'',y'')・・・(2)
(1)、(2)の各関数を逆関数化することにより、以下の関数(3)、(4)が導出される。
x''=F(x',y')・・・(3)
y''=G(x',y')・・・(4)
x'=H(x,y)・・・(5)
y'=I(x,y)・・・(6)
x''=F(H(x,y)、I(x,y))・・・(7)
y''=G(H(x,y)、I(x,y))・・・(8)
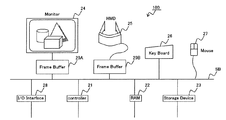
21 コントローラ
22 RAM
50 画像処理システム
L 眼鏡レンズ
100 眼鏡装用シミュレーションシステム
Claims (18)
- 仮想の眼鏡レンズを装用したときに観察し得る像を、画像表示装置を介して被験者に疑似体験させる眼鏡装用シミュレーションシステムにおいて、
前記仮想レンズに関する複数のパラメータを入力する第一の入力手段と、
前記仮想レンズに関する複数のパラメータに基づいて、前記仮想レンズの光学データを生成する第一の光学データ生成手段と、
前記観察光学系に関する複数のパラメータを入力する第二の入力手段と、
前記観察光学系に関する複数のパラメータに基づいて、前記像に対応するシミュレーション画像を観察するために用いられる観察光学系の光学データを生成する第二の光学データ生成手段と、
前記仮想レンズの光学データおよび前記観察光学系の光学データに基づいて、原画像に、前記仮想レンズの持つ歪みを付与し、前記観察光学系の持つ歪みを打ち消すような画像処理を施して前記シミュレーション画像を生成する画像生成手段と、
を有することを特徴とする眼鏡装用シミュレーションシステム。 - 請求項1に記載の眼鏡装用シミュレーションシステムにおいて、
前記画像生成手段は、前記シミュレーション画像を形成する全ての画素について、前記観察光学系に関する光線追跡と前記仮想レンズに関する光線追跡を行うことにより、各画素の位置に対応する原画像の位置を検出する検出手段を有し、
前記原画像の位置における輝度値を各画素の輝度値として設定することにより、前記シミュレーション画像を生成することを特徴とする眼鏡装用シミュレーションシステム。 - 請求項1に記載の眼鏡装用シミュレーションシステムにおいて、
前記画像生成手段は、前記シミュレーション画像を形成する画素のうち、基準となる複数の画素について、前記観察光学系に関する光線追跡と前記仮想レンズに関する光線追跡を行い、該光線追跡の結果から得られた、前記シミュレーション画像内の像と前記原画像内の像との位置関係を表す所定の関数を用いて、各画素に対応する前記原画像の位置を算出し、被験者が各画素の位置で見ることになる原画像の輝度値を各画素の輝度値として設定することにより、前記シミュレーション画像を生成することを特徴とする眼鏡装用シミュレーションシステム。 - 請求項1に記載の眼鏡装用シミュレーションシステムにおいて、
前記観察光学系は、単焦点レンズであり、
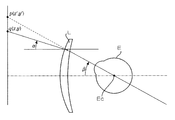
前記画像生成手段は、前記仮想レンズに起因する歪みを持つ画像に、眼の回旋角、前記観察光学系により屈折すると視線と一致する光線と光軸がなす角、および前記仮想レンズの屈折力によって規定される前記観察光学系の歪曲収差を打ち消すような画像処理を施すことにより、前記シミュレーション画像を生成することを特徴とする眼鏡装用シミュレーションシステム。 - 請求項1から請求項4のいずれかに記載の眼鏡装用シミュレーションシステムにおいて、
前記観察光学系は、前記画像表示装置内に設けられた光学系を含むことを特徴とする眼鏡装用シミュレーションシステム。 - 前記観察光学系に関する複数のパラメータの一つに、前記画像表示装置において、前記被験者に対応して実行された視度調整に関する設定値を含むことを特徴とする請求項1から請求項5のいずれかに記載の眼鏡装用シミュレーションシステム。
- 前記観察光学系は、被験者が現在装用中の眼鏡光学系を含むことを特徴とする請求項1から請求項6のいずれかに記載の眼鏡装用シミュレーションシステム。
- 請求項1から請求項7のいずれかに記載の眼鏡装用シミュレーションシステムにおいて、
前記観察光学系に関する形状を測定する形状測定手段をさらに有し、
前記第二の光学データ生成手段は、測定された前記観察光学系に関する形状に基づいて、前記観察光学系の光学データを生成することを特徴とする眼鏡装用シミュレーションシステム。 - 請求項1から請求項8のいずれかに記載の眼鏡装用シミュレーションシステムにおいて、
前記仮想の眼鏡レンズは、累進屈折力レンズであることを特徴とする眼鏡装用シミュレーションシステム。 - 仮想の眼鏡レンズを装用したときに観察し得る像を、画像表示装置を介して被験者に疑似体験させる眼鏡装用シミュレーションシステムにおける画像生成方法であって、
前記仮想レンズに関する複数のパラメータを入力する第一の入力工程と、
前記仮想レンズに関する複数のパラメータに基づいて、前記仮想レンズの光学データを生成する第一の光学データ生成工程と、
前記観察光学系に関する複数のパラメータを入力する第二の入力工程と、
前記観察光学系に関する複数のパラメータに基づいて、前記像に対応するシミュレーション画像を観察するために用いられる観察光学系の光学データを生成する第二の光学データ生成工程と、
前記第一、前記第二の各光学データ生成工程で生成された前記第一、前記第二の各光学データに基づいて、原画像に、前記仮想レンズの持つ歪みを付与するとともに、前記観察光学系の持つ歪みを打ち消すような画像処理を施して画像を生成する画像生成工程と、
を有することを特徴とする画像生成方法。 - 請求項10に記載の画像生成方法において、
前記画像生成工程は、
前記シミュレーション画像における画素について、前記観察光学系に関する光線追跡と前記仮想レンズに関する光線追跡を行うことにより、該画素の位置に対応する原画像の位置を検出する検出工程と、
前記検出工程により検出された前記原画像の位置における輝度値を前記画素の輝度値として設定する設定工程と、を有し、
前記シミュレーション画像における全ての画素について、前記検出工程と前記設定工程を行うことにより、前記シミュレーション画像を生成する画像生成方法。 - 請求項10に記載の画像生成方法において、
前記画像生成工程は、
前記シミュレーション画像を形成する画素のうち、基準となる複数の画素について、前記観察光学系に関する光線追跡と前記仮想レンズに関する光線追跡を行うことにより、該画素の位置に対応する原画像の位置を検出する検出工程と、
前記検出工程の検出結果に基づき、前記シミュレーション画像内の像と前記原画像内の像との位置関係を表す所定の関数を生成する関数生成工程と、
前記関数生成工程により生成された前記所定の関数を用いて、各画素に対応する前記原画像の位置を算出する位置算出工程と、を含み、
各画素の位置に対応する原画像の位置での輝度値を各画素の輝度値として設定することにより、前記シミュレーション画像を生成する画像生成方法。 - 請求項10に記載の画像生成方法において、
前記画像生成工程は、前記仮想レンズに起因する歪みを持つ画像に、眼の回旋角、前記観察光学系により屈折すると視線と一致する光線と光軸がなす角、および前記仮想レンズの屈折力によって規定される前記観察光学系の歪曲収差を打ち消すような画像処理を施すことにより、前記シミュレーション画像を生成する画像生成方法。 - 請求項10から請求項13のいずれかに記載の画像生成方法において、
前記観察光学系は、前記画像表示装置内に設けられた光学系を含む画像生成方法。 - 請求項10から請求項14のいずれかに記載の画像生成方法において、
前記観察光学系に関する複数のパラメータの一つに、前記画像表示装置において、前記被験者に対応して実行された視度調整に関する設定値を含む画像生成方法。 - 請求項10から請求項15のいずれかに記載の画像生成方法において、
前記観察光学系は、被験者が現在装用中の眼鏡光学系を含む画像生成方法。 - 請求項10から請求項16のいずれかに記載の画像生成方法において、
前記観察光学系に関する形状を測定する形状測定工程をさらに有し、
前記第二の光学データ生成工程において、測定された前記観察光学系に関する形状に基づいて、前記観察光学系の光学データを生成する画像生成方法。 - 請求項10から請求項17のいずれかに記載の画像生成方法において、
前記仮想の眼鏡レンズは、累進屈折力レンズである画像生成方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004079399A JP4477909B2 (ja) | 2004-03-19 | 2004-03-19 | 眼鏡装用シミュレーションシステム、および画像生成方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004079399A JP4477909B2 (ja) | 2004-03-19 | 2004-03-19 | 眼鏡装用シミュレーションシステム、および画像生成方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005261690A JP2005261690A (ja) | 2005-09-29 |
| JP4477909B2 true JP4477909B2 (ja) | 2010-06-09 |
Family
ID=35086827
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004079399A Expired - Lifetime JP4477909B2 (ja) | 2004-03-19 | 2004-03-19 | 眼鏡装用シミュレーションシステム、および画像生成方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4477909B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014030403A1 (ja) | 2012-08-20 | 2014-02-27 | Hoya株式会社 | シミュレーション装置、シミュレーションシステム、シミュレーション方法及びシミュレーションプログラム |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1862110A1 (en) | 2006-05-29 | 2007-12-05 | Essilor International (Compagnie Generale D'optique) | Method for optimizing eyeglass lenses |
| JP5341462B2 (ja) * | 2008-10-14 | 2013-11-13 | キヤノン株式会社 | 収差補正方法、画像処理装置および画像処理システム |
| WO2010044383A1 (ja) * | 2008-10-17 | 2010-04-22 | Hoya株式会社 | 眼鏡の視野画像表示装置及び眼鏡の視野画像表示方法 |
| JP5632245B2 (ja) * | 2010-09-27 | 2014-11-26 | Hoya株式会社 | 眼鏡の視野画像表示装置 |
| WO2015007878A1 (en) * | 2013-07-18 | 2015-01-22 | Essilor International (Compagnie Generale D'optique) | A method for determining a visual effect of an ophthalmic lens |
| JP6220627B2 (ja) * | 2013-10-17 | 2017-10-25 | 株式会社ニコン・エシロール | 計測方法、眼鏡レンズ選択方法、眼鏡レンズ設計方法、眼鏡レンズ製造方法および計測装置 |
| JP2022073094A (ja) * | 2020-10-30 | 2022-05-17 | セイコーエプソン株式会社 | 光学モジュール及び虚像表示装置 |
| CN116300094B (zh) * | 2023-03-17 | 2025-07-29 | 浙江炽云科技有限公司 | 一种用于抬头显示装置的可视化分析方法及相关设备 |
-
2004
- 2004-03-19 JP JP2004079399A patent/JP4477909B2/ja not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014030403A1 (ja) | 2012-08-20 | 2014-02-27 | Hoya株式会社 | シミュレーション装置、シミュレーションシステム、シミュレーション方法及びシミュレーションプログラム |
| US9364142B2 (en) | 2012-08-20 | 2016-06-14 | Hoya Corporation | Simulation device, simulation system, simulation method and simulation program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005261690A (ja) | 2005-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6230591B2 (ja) | 眼鏡レンズの設計システム、供給システム、設計方法及び製造方法 | |
| JP6276691B2 (ja) | シミュレーション装置、シミュレーションシステム、シミュレーション方法及びシミュレーションプログラム | |
| JP5967597B2 (ja) | 画像表示装置および画像表示方法 | |
| JP6332392B2 (ja) | 眼鏡レンズの設計方法、眼鏡レンズの製造方法、眼鏡レンズ選択装置および眼鏡レンズ選択方法 | |
| CN113678055B (zh) | 眼镜镜片的至少一个光学参数的确定 | |
| CN105705982B (zh) | 用于确定渐进式眼镜片的至少一个光学设计参数的方法 | |
| JP5589060B2 (ja) | ぼやけ知覚に合わせてカスタマイズされたメガネレンズの製造方法 | |
| JP2012508895A (ja) | 乱視屈折を補正するための眼鏡レンズの最適化及び形成 | |
| JP4477909B2 (ja) | 眼鏡装用シミュレーションシステム、および画像生成方法 | |
| JP4846985B2 (ja) | 光学特性補間方法、眼鏡装用シミュレーション画像処理方法、眼鏡装用シミュレーション画像処理装置、眼鏡レンズの評価方法、眼鏡レンズの評価装置 | |
| KR20220002280A (ko) | 자연스럽게 바라보는 자세로 있는 대상자의 머리에 대한 유향 3d 표현을 구현하는 방법 | |
| US11747654B2 (en) | Computer-implemented method for generating data in order to produce at least one spectacle lens, and method for producing a pair of spectacles | |
| US20230243717A1 (en) | Method and system for determining at least one optical parameter of an optical lens | |
| CN113474719A (zh) | 用于在生产眼镜镜片的方法中使用的数据记录 | |
| CN111587397B (zh) | 图像生成装置、眼镜片选择系统、图像生成方法以及程序 | |
| JP2013226397A (ja) | 近業目的距離測定装置、並びに近業目的距離測定装置を用いた眼鏡レンズの製造方法及び製造システム | |
| JP3347514B2 (ja) | 眼光学系のシミュレーション装置 | |
| JP6364517B2 (ja) | 眼鏡レンズ設計方法および眼鏡レンズ製造方法 | |
| JP7710708B2 (ja) | 眼鏡レンズの設計方法及び評価方法 | |
| US20240115126A1 (en) | A device and method for automatically evaluating visual equipment | |
| JP2014112153A (ja) | パラメータ測定装置、パラメータ測定方法、眼鏡レンズ設計方法、眼鏡レンズ製造方法および眼鏡レンズ | |
| JP2014112154A (ja) | 眼鏡レンズ設計方法、眼鏡レンズ製造方法および眼鏡レンズ | |
| JP2016080746A (ja) | レンズ装着情報の算出方法、同算出方法を実行するための電子システム及び同電子システムに使用するプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070216 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20080611 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080917 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100309 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4477909 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |