JP4426784B2 - 方位測定装置 - Google Patents
方位測定装置 Download PDFInfo
- Publication number
- JP4426784B2 JP4426784B2 JP2003194736A JP2003194736A JP4426784B2 JP 4426784 B2 JP4426784 B2 JP 4426784B2 JP 2003194736 A JP2003194736 A JP 2003194736A JP 2003194736 A JP2003194736 A JP 2003194736A JP 4426784 B2 JP4426784 B2 JP 4426784B2
- Authority
- JP
- Japan
- Prior art keywords
- azimuth
- error
- calculated
- measurement error
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005259 measurement Methods 0.000 claims description 74
- 238000001514 detection method Methods 0.000 claims description 11
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000005415 magnetization Effects 0.000 description 2
- ORQBXQOJMQIAOY-UHFFFAOYSA-N nobelium Chemical compound [No] ORQBXQOJMQIAOY-UHFFFAOYSA-N 0.000 description 1
Images


Landscapes
- Measuring Magnetic Variables (AREA)
Description
【発明の属する技術分野】
本発明は、地磁気の方位を測定する方位測定装置に関する。
【0002】
【従来の技術】
従来から、方位を測定するために方位測定装置が利用されている。方位測定装置は、地磁気を検出するために直交配設された2つの磁気センサ(X磁気センサ、Y磁気センサ)を有しており、前記2つの磁気センサの合成出力は、水平状態で回転させたときに実際に得られる軌跡は楕円であるが、方位算出を行う際の演算処理を簡単に行えるように、前記磁気センサの合成出力が真円(方位円)となるように調整されている。
地磁気以外の装置などから発生する磁場が、たとえわずかであっても変動(着磁)すると、前記調整された方位円は変動のあった方向にオフセットされ、大きな測定誤差が発生する。また、地域により伏角が異なり、方位円の大きさも異なってくる。そのため多くの磁気検出装置には、磁場変動や地域差を補正する手段が備わっている(例えば、特許文献1参照)。
【0003】
しかし、使用する側にとってみると、今どのくらいの測定誤差があり、またいつ補正を行わなければならないかを明確に判断することができない(測定結果に異常があることを検出できたとしても、どの程度異常であるかを判断することができない。)。
また、方位の検出が正しく行われたか否かを判別するようにした方位測定装置も開発されている(例えば、特許文献2〜4参照)。
【0004】
【特許文献1】
特開平3−131712号公報(第1頁)
【特許文献2】
実開平3−127215号公報(第1頁)
【特許文献3】
特開平5−312575号公報(第1頁)
【特許文献4】
実開昭63−79517号公報(第1頁)
【0005】
【発明が解決しようとする課題】
しかしながら、補正直後でなければ、測定されている方位が正しいと信用することができない(補正前に測定された方位が正しかったかどうかは判断できない)。また、補正後、補正前はいったいどのくらいの測定誤差があり補正による効果がどのくらいあったかがわからないという問題がある。
【0006】
本発明は、測定した方位がどの程度の誤差を含んでいるのかを容易に判別することが可能な方位測定装置を提供することを課題としている。
【0007】
【課題を解決するための手段】
本発明によれば、地磁気を検出して対応する検出信号を出力する磁気センサと、前記磁気センサからの検出信号に基づいて方位を算出する方位算出手段と、前記方位算出手段で算出した方位を表示する表示手段とを有する方位測定装置において、前記方位算出手段で算出した方位を記憶する方位記憶手段と、前記方位記憶手段に記憶した前回算出の方位に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差または測定誤差範囲を算出する誤差算出手段とを備え、前記表示手段は前記誤差算出手段で算出した誤差を表示することを特徴とする方位測定装置が提供される。
誤差算出手段は、方位記憶手段に記憶した前回算出の方位に基づいて、今回算出の方位の誤差を算出する。表示手段は、前記誤差算出手段で算出した最大測定誤差または測定誤差範囲を表示する。
【0008】
ここで、前記誤差算出手段は、前記方位記憶手段に記憶した方位に基づく方位円と、今回の測定で得た方位に基づく方位円とのシフト量に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差または誤差範囲を算出するように構成してもよい。
また、前記誤差算出手段は、複数の測定点のデータに基づいて前記方位円の中心位置を算出し、該中心位置のシフト量に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差または測定誤差範囲を算出するように構成してもよい。
また、測定結果に含まれる可能性のある最大測定誤差が所定範囲外であると前記誤差算出手段が判断したとき、前記表示手段は、前記測定誤差が許容範囲外である旨の表示を行うように構成してもよい。
【0009】
【発明の実施の形態】
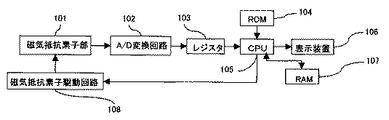
図1は、本発明の実施の形態に係る方位測定装置のブロック図である。
図1において、方位測定装置は、磁気センサを構成する磁気抵抗素子部101、アナログ/デジタル(A/D)変換回路102、レジスタ103、中央処理装置(CPU)105、CPU105が実行するプログラム等をあらかじめ記憶した読み出し専用メモリ(ROM)104、表示手段を構成する表示装置106、方位を記憶する方位記憶手段を構成するランダムアクセスメモリ(RAM)107、磁気抵抗素子部101を駆動する磁気抵抗素子駆動回路108を備えている。
磁気抵抗素子部101は、従来と同様に、相互に直交配設された2つの磁気抵抗素子(X磁気センサ、Y磁気センサ)を有している。CPU105は、後述するように、ROM104に記憶したプログラムを実行することにより、磁気抵抗素子部101からの検出信号に基づいて方位を算出する方位算出手段および前記方位算出手段で算出した方位に含まれる可能性のある最大測定誤差または測定誤差範囲を算出する誤差算出手段を構成する。
【0010】
図2は、本実施の形態に係る方位測定装置の処理を示すフローチャートであり、CPU105がROM104に予め記憶したプログラムを実行することによって行われる処理である。
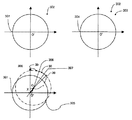
図3及び図4は、本実施の形態に係る方位測定装置の動作を説明するための説明図であり、同一部分には同一符号を付している。図3及び図4において、方位円301は前回方位θを測定した際の真円であり、方位円305は今回方位θを測定した際の真円である。
【0011】
以下、図1〜図4を用いて本発明の実施の形態の動作を説明する。
先ず、方位θの測定動作及び該測定した方位θの表示動作について説明すると、CPU105は、磁気抵抗素子部101からの検出信号に基づいて、公知の手法により、方位θの測定を行う。前記方位θの測定処理では、CPU105は、磁気抵抗素子駆動回路108を制御して、磁気抵抗素子部101を駆動させる。磁気抵抗素子部101は、そのXセンサ及びYセンサによって地磁気を検出して対応するアナログ信号の検出信号を出力する。A/D変換回路102は前記検出信号をデジタル信号に変換して、レジスタ103に記憶する。CPU105は、レジスタ103に記憶したデジタル形式の検出信号に基づいて、測定した点の方位θを算出してRAM107に順次記憶すると共に該算出した方位θを表示装置106に表示する。
【0012】
次に、測定した方位θに含まれる可能性のある最大測定誤差δまたは測定誤差範囲+δ〜−δの算出動作及び前記最大測定誤差δまたは測定誤差範囲+δ〜−δの表示動作について説明する。
CPU105は、図2のステップS201において、前述した方位θの測定処理を行い、方位θに対応するX座標データ及びY座標データを算出してRAM107に記憶する。ステップS201は方位算出手段を構成している。図3(a)に、このようにして測定した今回の測定点302を示している。尚、表示装置106に表示される方位θは、前回測定した方位円301の中心O’を基準とする方位である。
【0013】
CPU105は、前記方位測定処理を所定回数(本実施の形態では3回)行い(ステップS203)、各測定処理で得た測定点のX座標データ及びY座標データをRAM107に順次記憶する。その結果、図3(b)、(c)に示すように、測定点302〜303のXY座標が得られる。尚、この場合も、表示装置106に表示される方位θは、前回測定した方位円301の中心O’を基準とする方位である。
次に、CPU105は、ステップS203において、前記方位測定を所定回数(本実施の形態では3回)行ったと判断すると、RAM107に記憶した最新の3点の測定点302〜304のX座標データ及びY座標データを用いて、垂直2等分線306、307の交点Oを算出する(ステップS204)。即ち、測定点302、303の2等分線306と、測定点303、304の2等分線307との交点Oを算出する。
【0014】
次に、CPU105は、交点Oと各測定点302〜304の距離rを算出する(ステップS205)。測定点302〜304は同一円上に位置するように調整されているため、交点Oと各測定点302〜304までの距離rは等しい。交点Oを中心として、各測定点302〜304を通る真円305が今回測定した方位の方位円である。
次に、CPU105は、前回得られた方位円301の中心O’と前記垂直2等分線の交点Oとの距離(シフト量)Xを算出する(ステップS206)。尚、交点Oは、各測定点302〜304における正しい方位を算出する際の中心となる点であり、交点Oを基準とする方位が各測定点の正しい方位θである。しかしながら、表示装置106に表示される方位θは、前回測定した方位円301の中心O’を基準とする方位であるため、これにはシフト量Xに応じた測定誤差が含まれていることになる。
【0015】
次に、CPU105は、距離Xがr以下か否かを判断し(ステップS207)、距離Xがrを越える場合には、測定誤差が許容範囲外であると判断して、表示装置106に測定誤差が許容範囲外である旨の表示、例えば、方位針の校正を求める表示を行う(ステップS208)。即ち、CPU105は、測定誤差が、RAM107に予め記憶した所定範囲外になると判断した場合には、表示装置106は、測定誤差が許容範囲外である旨の表示を行う。これにより、使用者は、再度方位を測定し直す等の対応をとることが可能になる。
ステップS207において、距離Xがr以下の場合には、X=rsinδより、方位測定結果に含まれる可能性のある最大の測定誤差δ(=arcsin(X/r))を算出する(ステップS209)。
【0016】
図4は、最大の測定誤差δを算出するための説明図である。図4(a)において、方位円301は前回測定して得た円であり、方位円305は着磁によりシフトした円であり、点Aの正確な方位θは、方位円305を基準として算出する必要があるにも拘わらず、円301を基準として算出されるため誤差を含んだ方位θ’が得られる。
着磁によりずれた円305の中心Oを基準として、測定点Aの座標を(cosθ,sinθ)として、円305の中心Oを基準にcosδを求めると、cosδ=(1+xcosθ)/√(x2+2xcosθ+1)となり、測定誤差の絶対値|δ|は、同図(b)の位置で最大となる。また、δが0〜πの間はマイナス側のずれとなり又、δがπ〜2πの間は+側のずれとなる。尚、ステップS202〜S209は誤差算出手段を構成している。
次に、CPU105は、得られた測定誤差の範囲(+δ〜−δ)を表示装置106に表示する(ステップS210)。ステップS210は表示装置106とともに表示手段を構成している。これにより、利用者は、表示装置106に表示された方位の最大測定誤差を知ることが可能になる。
【0017】
以上述べたように、本発明の実施の形態に係る方位測定装置は、地磁気を検出して対応する検出信号を出力する磁気抵抗素子部101と、磁気抵抗素子部101からの検出信号に基づいて方位を算出する方位算出手段(CPU105の処理ステップS201)と、前記方位算出手段で算出した方位を表示する表示装置106とを有する方位測定装置において、前記方位算出手段で算出した方位を記憶するRAM107と、RAM107に記憶した前回算出の方位に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差を算出する誤差算出手段(CPU105の処理ステップS202〜S209)とを備え、前記表示手段は前記誤差算出手段で算出した誤差を表示することを特徴としている。
【0018】
ここで、前記誤差算出手段は、前記方位記憶手段に記憶した方位に基づく方位円301と、今回の測定で得た方位に基づく方位円305とのシフト量Xに基づいて、今回算出の方位に含まれる可能性のある最大測定誤差δまたは測定誤差範囲+δ〜−δを算出するように構成している。
また、前記誤差算出手段は、複数の測定点のデータ302〜304に基づいて前記方位円301、305の中心位置を算出し、該中心位置301、305のシフト量Xに基づいて、今回算出の方位に含まれる可能性のある最大測定誤差δまたは測定誤差範囲+δ〜−δを算出するように構成している。
【0019】
したがって、方位測定装置の使用者は、測定した方位がどの程度の誤差を含んでいるのかを容易に知ることが可能になる。これにより、方位検出装置を補正する時期を容易に知ることができ、補正を必要としていないのに無駄に補正を行うといったことを防止することが可能になる。また、現在までに測定した結果の測定誤差範囲を知ることができ、測定結果を信頼できるかどうかを判断することが可能になる。また、補正後に補正前の測定誤差範囲を知ることにより、補正による効果を実感することができ、快く補正を行うことができる。
尚、前記実施の形態では、磁気センサとして磁気抵抗素子の例をあげたが、ホール素子など、種々の磁気センサを使用することが可能である。
【0020】
【発明の効果】
本発明に係る方位測定装置によれば、測定した方位がどの程度の誤差を含んでいるのかを容易に判別することが可能になる。
【図面の簡単な説明】
【図1】 本発明の実施の形態に係る方位測定装置のブロック図である。
【図2】 本発明の実施の形態に係る方位測定装置の処理を示すフローチャートである。
【図3】 本発明の実施の形態に係る方位測定装置の動作を説明するための説明図である。
【図4】 本発明の実施の形態に係る方位測定装置の動作を説明するための説明図である。
【符号の説明】
101・・・磁気センサを構成する磁気抵抗素子部
102・・・アナログ/デジタル変換回路
103・・・レジスタ
104・・・ROM
105・・・方位算出手段及び誤差算出手段を構成する中央処理装置(CPU)
106・・・表示手段を構成する表示装置
107・・・方位記憶手段を構成するRAM
108・・・磁気抵抗素子駆動回路
Claims (4)
- 地磁気を検出して対応する検出信号を出力する磁気センサと、前記磁気センサからの検出信号に基づいて方位を算出する方位算出手段と、前記方位算出手段で算出した方位を表示する表示手段とを有する方位測定装置において、
前記方位算出手段で算出した方位を記憶する方位記憶手段と、前記方位記憶手段に記憶した前回算出の方位に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差を算出する誤差算出手段とを備え、前記表示手段は前記誤差算出手段で算出した最大測定誤差または測定誤差範囲を表示することを特徴とする方位測定装置。 - 前記誤差算出手段は、前記方位記憶手段に記憶した方位に基づく方位円と、今回の測定で得た方位に基づく方位円とのシフト量に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差または測定誤差範囲を算出することを特徴とする請求項1記載の方位測定装置。
- 前記誤差算出手段は、複数の測定点のデータに基づいて前記方位円の中心位置を算出し、該中心位置のシフト量に基づいて、今回算出の方位に含まれる可能性のある最大測定誤差または測定誤差範囲を算出することを特徴とする請求項2記載の方位測定装置。
- 測定に含まれる可能性のある最大測定誤差が所定範囲外であると前記誤差算出手段が判断したとき、前記表示手段は、前記測定誤差が許容範囲外である旨の表示を行うことを特徴とする請求項1乃至3のいずれか一に記載の方位測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003194736A JP4426784B2 (ja) | 2003-07-10 | 2003-07-10 | 方位測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003194736A JP4426784B2 (ja) | 2003-07-10 | 2003-07-10 | 方位測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005030845A JP2005030845A (ja) | 2005-02-03 |
| JP4426784B2 true JP4426784B2 (ja) | 2010-03-03 |
Family
ID=34205793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003194736A Expired - Fee Related JP4426784B2 (ja) | 2003-07-10 | 2003-07-10 | 方位測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4426784B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6099275B2 (ja) * | 2014-07-15 | 2017-03-22 | たかい食品株式会社 | 分解組成物及びその製造方法 |
-
2003
- 2003-07-10 JP JP2003194736A patent/JP4426784B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005030845A (ja) | 2005-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20120078562A1 (en) | Geomagnetic sensing device | |
| JPWO2005003683A1 (ja) | 方位角計測装置及び方位角計測方法 | |
| FI120276B (fi) | Kompassilaite ja menetelmä kompassilaitteita varten | |
| FI126012B (fi) | Menetelmä ja laite suunnan määrittämiseksi magneettikentässä | |
| KR20140093111A (ko) | 지자기 센서 오차 보정 장치 및 지자기 센서 오차 보정 방법 | |
| US11448527B2 (en) | Magnetic encoder, method, system for detecting absolute electrical angle, and readable storage medium | |
| KR101024286B1 (ko) | 자이로 센서와 수준센서가 구비된 롤 간 평행 및 수평도 정밀 측정장치 및 이를 이용한 롤 얼라이먼트 측정방법 | |
| JP2009505062A5 (ja) | ||
| JP4941199B2 (ja) | ナビゲーション装置 | |
| US7805277B2 (en) | Step number measuring apparatus | |
| EP1754020B1 (en) | System, method, device and computer program for improving the readability of an electronic compass | |
| EP3211380B1 (en) | Rotation detection device | |
| TWI452263B (zh) | Geomagnetic detection device | |
| JP4426784B2 (ja) | 方位測定装置 | |
| CN102183232B (zh) | 定向传感器 | |
| JP5168629B2 (ja) | 方位角計測装置及び方位角計測方法 | |
| JP6550906B2 (ja) | 傾斜度測定方法及び装置並びに電子機器及びプログラム | |
| CN104101337A (zh) | 用于电子罗盘的校正方法 | |
| JPWO2007020702A1 (ja) | センサ装置 | |
| JP5070428B2 (ja) | 電子コンパス及び方位測定方法 | |
| TW201139996A (en) | Method of automatic orientation detection | |
| EP2535683B1 (en) | Electronic level | |
| JP4551661B2 (ja) | 電子方位計、記録媒体および方位演算プログラム | |
| CN101253387A (zh) | 传感器装置 | |
| WO2008026330A1 (en) | Electronic compass |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090515 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091208 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091211 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4426784 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121218 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131218 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |