JP4386354B2 - 磁気共鳴撮像装置 - Google Patents
磁気共鳴撮像装置 Download PDFInfo
- Publication number
- JP4386354B2 JP4386354B2 JP2004204791A JP2004204791A JP4386354B2 JP 4386354 B2 JP4386354 B2 JP 4386354B2 JP 2004204791 A JP2004204791 A JP 2004204791A JP 2004204791 A JP2004204791 A JP 2004204791A JP 4386354 B2 JP4386354 B2 JP 4386354B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- space
- data
- straight line
- gradient magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
Description
M. Deimling, O. Heid, "Magnetization Prepared True FISP Imaging" Proc., SMRM, 2nd Annual Meeting, 495(1994)
本発明は、シーケンス繰り返し時間TRの実質的な延長をすることなく、1つのエコー信号から従来のほぼ2倍のk空間データを取得することが可能であり、これによって高いSNRを実現できるMRI装置を提供することを目的とする。
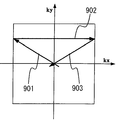
一つの態様として、閉ループの第1の直線部は、前記k空間の原点を通り、前記第2及び第3の直線部と重なる直線上にあり、制御手段は前記閉ループを構成する直線と座標軸とがなす角度を変えながら前記パルスシーケンスを繰り返しk空間データを取得する。
この場合、制御手段は、前記閉ループの第1の直線部が前記k空間の一の座標軸と平行であるとき及び前記閉ループの第1の直線部が前記k空間の他の座標軸と平行であるときに、それぞれk空間データを取得し、それぞれのk空間データを加算して画像再構成するように信号処理手段を制御するものとしてもよい。
閉ループの第1の直線部が、k空間の原点を通り、第2及び第3の直線部と重なる直線上にあり、制御手段が閉ループを構成する直線と座標軸とがなす角度を変えながらパルスシーケンスを繰り返しk空間データを取得することにより、k空間データを放射状に取得する、いわゆるラディアルスキャンとなり、体動の影響を受けにくい等のラディアルスキャンの効果が得られると共に、1回の計測で通常のラディアルスキャンの2倍のデータを取得することができる高いSNRを実現できる。
図1は本発明が適用されるMRI装置の全体概要を示すブロック図である。
このMRI装置は、被検体101が挿入される空間に静磁場を発生する磁石102と、この空間に傾斜磁場を発生する傾斜磁場コイル103と、被検体の撮像領域に高周波磁場を発生するRFコイル104と、被検体101が発生する核磁気共鳴(MR)信号を検出するRFプローブ105と、静磁場空間に被検体101を挿入するためのベッド112を備えている。
信号処理部107は、信号検出部106から送出されるディジタル信号をk空間データとして収集し、必要に応じて補間、加算、補正係数計算などの処理を行うとともにフーリエ変換を行い被検体の画像を再構成し、表示部108に表示させる。
また以上の実施形態も三次元撮影にも適用することが可能である。
Claims (7)
- 静磁場中に置かれた被検体に高周波磁場及び傾斜磁場を所定のパルスシーケンスに従い印加する磁場印加手段と、前記被検体から発生する核磁気共鳴信号をk空間データとして計測する計測手段と、前記k空間データを用いて前記被検体の画像を再構成し表示する信号処理手段と、前記磁場印加手段、計測手段及び信号処理手段を制御する制御手段とを備えた磁気共鳴撮像装置において、
前記制御手段は、前記高周波磁場印加から核磁気共鳴信号計測終了までに印加される傾斜磁場を制御し、前記k空間の原点を通る閉ループであって、第1の直線部と、前記第1の直線部の一端と前記k空間の原点を通る第2の直線部と、前記第1の直線部の他端と前記k空間の原点を通る第3の直線部とを含む軌跡上のデータを、前記高周波磁場の印加による1回の励起で取得することを特徴とする磁気共鳴撮像装置。 - 前記閉ループの第1の直線部は、前記k空間の原点を通り、前記第2及び第3の直線部と重なる直線上にあり、前記制御手段は前記閉ループを構成する直線と座標軸とがなす角度を変えながら前記パルスシーケンスを繰り返しk空間データを取得することを特徴とする請求項1記載の磁気共鳴撮像装置。
- 前記閉ループの第1の直線部は、k空間の座標軸と平行であり、前記制御手段は、前記k空間の座標軸から前記第1の直線までの距離を変えながら前記パルスシーケンスを繰り返しk空間データを取得することを特徴とする請求項1記載の磁気共鳴撮像装置。
- 前記制御手段は、前記閉ループの第1の直線部が前記k空間の一の座標軸と平行であるとき及び前記閉ループの第1の直線部が前記k空間の他の座標軸と平行であるときに、それぞれk空間データを取得し、それぞれのk空間データを加算して画像再構成するように信号処理手段を制御することを特徴とする請求項3記載の磁気共鳴撮像装置。
- 静磁場中に置かれた被検体に高周波磁場及び傾斜磁場を所定のパルスシーケンスに従い印加する磁場印加手段と、読み出し方向の傾斜磁場印加次に所定の時間内で前記被検体から発生する核磁気共鳴信号を計測する計測手段と、前記核磁気共鳴信号を用いて前記被検体の画像を再構成し表示する信号処理手段と、前記磁場印加手段、計測手段及び信号処理手段を制御する制御手段とを備えた磁気共鳴撮像装置において、
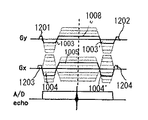
前記磁場印加手段は、高周波磁場を繰り返し印加し、1の高周波磁場印加と次の高周波磁場印加の間に、2度の極性の反転を含み対称的な印加パターンを有する傾斜磁場パルスを印加するとともに1のエコー信号を計測するパルスシーケンスを実行し、
前記制御手段は、前記核磁気共鳴信号の計測を、前記対称的な印加パターンを有する傾斜磁場パルスの1度目の反転の前から開始し、2度目の反転後に終了するように前記計測手段を制御し、前記1のエコー信号から、k空間の原点を通る閉ループであって、第1の直線部と、前記第1の直線部の一端と前記k空間の原点を通る第2の直線部と、前記第1の直線部の他端と前記k空間の原点を通る第3の直線部とを含む軌跡上のデータを取得することを特徴とする磁気共鳴撮像装置。 - 前記制御手段は、前記対称的な印加パターンを有する傾斜磁場パルスの前後に、極性が異なる付加的傾斜磁場パルスを印加して、前記閉ループに加えてk空間の低空間周波数領域のデータも計測することを特徴とする請求項5記載の磁気共鳴撮像装置。
- 前記磁場印加手段が実行するパルスシーケンスは、trueFISPシーケンス、ラディアルスキャンシーケンス及び高速スピンエコーシーケンスから選択されるいずれか又はこれらの組み合わせである請求項5又は6に記載の磁気共鳴撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004204791A JP4386354B2 (ja) | 2004-07-12 | 2004-07-12 | 磁気共鳴撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004204791A JP4386354B2 (ja) | 2004-07-12 | 2004-07-12 | 磁気共鳴撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006025845A JP2006025845A (ja) | 2006-02-02 |
| JP2006025845A5 JP2006025845A5 (ja) | 2007-08-02 |
| JP4386354B2 true JP4386354B2 (ja) | 2009-12-16 |
Family
ID=35892883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004204791A Expired - Fee Related JP4386354B2 (ja) | 2004-07-12 | 2004-07-12 | 磁気共鳴撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4386354B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4443079B2 (ja) | 2001-09-13 | 2010-03-31 | 株式会社日立メディコ | 磁気共鳴イメージング装置及び磁気共鳴イメージング装置用rf受信コイル |
| JP5230967B2 (ja) * | 2007-06-04 | 2013-07-10 | 株式会社日立メディコ | 核磁気共鳴イメージング装置 |
| US9594142B2 (en) | 2011-05-20 | 2017-03-14 | Hitachi, Ltd. | Magnetic resonance imaging apparatus and echo signal measurement method |
| CN105334321B (zh) * | 2014-07-31 | 2017-07-18 | 西门子(深圳)磁共振有限公司 | 磁共振成像方法和系统 |
| JP7123595B2 (ja) * | 2017-03-29 | 2022-08-23 | キヤノンメディカルシステムズ株式会社 | 磁気共鳴イメージング装置および医用処理装置 |
-
2004
- 2004-07-12 JP JP2004204791A patent/JP4386354B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006025845A (ja) | 2006-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110869790B (zh) | 使用具有可变对比度的星形堆叠采集进行的mr成像 | |
| RU2611082C2 (ru) | Магнитно-резонансная (mr) визуализация с в1-отображением | |
| CN104345289B (zh) | 用于确定水的t1时间和脂肪的t1时间的方法和磁共振设备 | |
| CN109814058B (zh) | 磁共振系统和在其中生成检查对象的磁共振图像的方法 | |
| US10302729B2 (en) | Method and magnetic resonance apparatus for speed-compensated diffusion-based diffusion imaging | |
| JP2004526491A (ja) | 拡散強調された磁気共鳴画像化データの取得方法および装置 | |
| US10247798B2 (en) | Simultaneous multi-slice MRI measurement | |
| JPH07171122A (ja) | Epi及びgrase mriにおける読み出し傾斜磁界極性の補正方法 | |
| JP2011024926A (ja) | 磁気共鳴イメージング装置 | |
| CN105005011A (zh) | 在三维快速自旋回波中的混合采集的磁共振成像方法 | |
| EP3060116B1 (en) | Mr imaging with temperature mapping | |
| JP2020522344A (ja) | 並列マルチスライスmr撮像 | |
| JP7023954B2 (ja) | プロペラmrイメージング | |
| JP4386354B2 (ja) | 磁気共鳴撮像装置 | |
| US20060125476A1 (en) | Eddy current compensation with N-average SSFP imaging | |
| EP3185029A1 (en) | Mr imaging using propeller acquisition with t2 decay correction | |
| CN108431625A (zh) | 具有对运动引起的扩散梯度不一致性的修正的dti | |
| CN116908759A (zh) | 用于使用t2制备的反转同时标定定量mri参数的方法和系统 | |
| JP4566039B2 (ja) | 磁気共鳴イメージング装置 | |
| EP3736593A1 (en) | Dual echo steady state mr imaging using bipolar diffusion gradients | |
| JP2021104198A (ja) | 磁気共鳴撮像装置及びその制御方法 | |
| JP2002306454A (ja) | 磁気共鳴映像装置 | |
| US7148687B2 (en) | Method for the acquisition of moving objects through nuclear magnetic resonance tomography | |
| WO2024236314A1 (en) | Method of image generation by mri using epi | |
| JP2591405B2 (ja) | Mrイメージング装置のバイポーラグラジェントの調整法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090924 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090925 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121009 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121009 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131009 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |