JP4343317B2 - 磁気共鳴イメージング装置 - Google Patents
磁気共鳴イメージング装置 Download PDFInfo
- Publication number
- JP4343317B2 JP4343317B2 JP09519899A JP9519899A JP4343317B2 JP 4343317 B2 JP4343317 B2 JP 4343317B2 JP 09519899 A JP09519899 A JP 09519899A JP 9519899 A JP9519899 A JP 9519899A JP 4343317 B2 JP4343317 B2 JP 4343317B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic resonance
- image
- signal
- resonance imaging
- small receiving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
Description
【発明の属する技術分野】
本発明は、被検体中の水素や燐等からの核磁気共鳴(以下、「NMR」という)信号を測定し、核の密度分布や緩和時間分布等を映像化する磁気共鳴イメージング(MRI)装置に関する。
【0002】
【従来の技術】
MRI装置では、RFコイルから被検体に電磁波を照射したときに被検体に生じるNMR信号を受信プローブ(受信コイル)で受信し、その信号にフーリエ変換等の演算処理を施すことにより画像を再構成する。この受信用のRFコイルとして、「マルチプルRFコイル」と呼ばれる高感度コイルが近年多用されている(例えば、特表平2-500175号など)。マルチプルコイルでは、相対的に高感度な小型受信コイル(以下、単に小型コイルという)を複数個並べて、各小型コイルで受信した信号を合成することにより、小型コイルの高い感度を保ったまま視野を拡大し高感度化を図ることができる。
このようなマルチプルコイルで受信した信号から画像再構成するには、まずマルチプルコイルを構成する個々の小型コイルの受信感度に基づき信号合成用の重みマップを作成し、その重みマップに基づき各小型コイルからの信号に重み付けし合成する。
【0003】
【発明が解決しようとする課題】
しかしマルチプルコイルを用いて連続撮影する場合には、連続した画像間で体動等による感度分布の変化を考慮し、画像毎に重み付けマップを作成する必要がある。このことを図9により説明する。
図9(a)、(b)は4つの小型コイル5021〜5024からなるマルチプルコイルを用いて腹部を連続撮像する場合を示したものである。各小型コイル5021〜5024で取得した信号を合成する場合、各小型コイルの感度分布6011〜6014から信号合成用の重みマップWi(x,y)(x,yはそれぞれ実空間の座標を表す)を作成し、フーリエ変換後の信号にこの重みマップに基づく重み付けをした後、合成し画像を得る。この連続撮影中に同図(b)に示すように呼吸運動等により被検体が動くと、小型コイル5021、5022の感度分布6011、6012は矢印で示すようにシフトし、それぞれの重なりも変化してしまうため同図(a)に示す感度分布から求めた重みマップを使用することはできない。
【0004】
このようにマルチプルコイルを用いた連続撮影では画像毎に重み付けマップを作成する処理を必要とするために、高性能の演算機や並列処理を要していた。また演算時間が多いため、画像取得の時間間隔の短縮が制限されるという問題があった。
そこで本発明は、マルチプルコイルを用いたMRI装置において連続撮影の際の画像取得時間の短縮をはかることができ、もってリアルタイム性のある画像を表示することが可能なMRI装置を提供することを目的とする。
【0005】
【課題を解決するための手段】
上記目的を達成する本発明のMRI装置は、複数の小型受信コイルからなる受信プローブと、受信プローブを用いて被検体からの核磁気共鳴信号の計測を制御する計測制御手段と、小型受信コイルの各々で受信した核磁気共鳴信号から小型受信コイル毎の画像を作成し、該小型受信コイル毎の画像を重み付けて合成し、合成画像を得る信号処理手段と、被検体の体動情報を検出する体動情報検出手段と、を有し、体動情報に基づいて、小型受信コイル毎の画像を合成する際の重みを更新することを特徴とすることを特徴とする。
或いは、核磁気共鳴信号に基づいて前記小型受信コイルの各々の位置変化情報を検出する位置変化情報検出手段を有し、受信プローブを用いた核磁気共鳴信号の計測と、位置変化情報の検出と、合成画像の作成と、を繰り返す場合に、位置変化情報に基づいて、小型受信コイル毎の画像を合成する際の重みを更新することを特徴とする。
【0006】
本発明において受信プローブを構成する小型受信コイルとしては、フェイズドアレイコイルのような構造的に組合されたコイルの他、カテーテル等に固定され、他の小型受信コイルと組合せて信号処理される小型受信コイルも含む。
体動或いは小型受信コイル自体の動きによって複数のコイルの位置が変化したことを検出したときのみ重みマップを更新するようにしたので、画像処理演算量を大幅に減らすことができ、連続画像のリアルタイム性を向上することができる。
【0007】
またコイルの位置を検出する手段は、計測した信号の変化から動きを検出するものであり、体動補正のために用いられるナビゲーションエコーを利用することができる。ナビゲーションエコーは一般に1枚の画像のための信号取得の間に体動があった場合にそれを補正する手段として用いられているものであり、本発明のMRI装置ではこのナビゲーションエコーをコイルの位置変化の検出手段として利用することにより、ナビゲーションエコーを用いて画像の体動補正を行ないつつ、必要なときのみ重みマップの更新をすることができる。
【0008】
【発明の実施の形態】
以下、本発明を図面に示す実施例を参照して説明する。
図1は、本発明が適用されるMRI装置の全体構成を示す図で、このMRI装置は、被検体1の周囲の広がりのある空間に静磁場を発生する磁石2と、この空間に傾斜磁場を発生する傾斜磁場コイル3と、この空間に高周波磁場を発生するRFコイル4と、被検体1が発生するNMR信号を検出するRFプローブ(受信プローブ)5を備えている。また制御・信号処理系として傾斜磁場電源9、RF送信部10、信号検出部6、信号処理部7、制御部11および表示部8を備えている。被検体1はベッドに横たわった状態で静磁場磁石内の計測空間に運ばれる。
【0009】
傾斜磁場コイル3は、X、Y、Zの3方向の傾斜磁場コイルで構成され、傾斜磁場電源9からの信号に応じてそれぞれ傾斜磁場を発生する。RFコイル4はRF送信部10の信号に応じて高周波磁場を発生する。
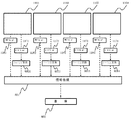
RFプローブ5は、図2に示すように4つの小型コイル502とそれぞれに接続されたプリアンプ503からなるマルチプルコイル501であって、各小型コイル502からの信号は、信号検出部6のA/D変換器および直交検波器で検出され、信号処理部7で信号処理され、また計算により画像信号に変換される。
【0010】
画像は表示部8で表示される。傾斜磁場電源9、RF送信部10、信号検出部6は一般にパルスシーケンスと呼ばれるタイムチャートに従い制御部11で制御される。
信号処理部7における信号処理は、各小型コイルからの信号に基づく感度分布計算、感度分布に基づく重みマップ作成、各小型コイルからの信号の重み付け合成、各小型コイルからの信号について体動の有無の検出、体動の有無の検出結果に基づく体動補正及び重みマップの更新を含む。
【0011】
以下、上記構成のMRI装置を用いた連続撮影、特に信号処理系における信号処理の手順の一実施例を図3〜図6を参照して説明する。
図3は信号処理系7における処理の一実施例を示すフローで、まずナビゲーションエコーの取得を含むパルスシーケンスを実行して被検体の所定の領域を撮影し、1枚の画像再構成に必要なエコー信号の組み106を取得する(処理107)。連続撮影で採用するパルスシーケンスは特に限定されないが、エコー計測毎の体動を検出するために少なくとも1つのナビゲーションエコーの計測が含まれるシーケンスが好ましい。このようなパルスシーケンスの一例を図4に示す。図4に示すパルスシーケンスは一般的なスピンエコー法によるパルスシーケンスであるが、本計測エコー403の他に位相エンコードしないナビゲーションエコー303を発生させ取得するステップ304を含んでいる。ナビゲーションエコー303は、スライス選択RFパルス401および反転RFパルス402を印加後、位相エンコードを付与することなく反転読み出し傾斜磁場301を用いて発生させ、サンプリング時間302に計測する。その後位相エンコード傾斜磁場407、読み出し傾斜磁場408を印加してスピンエコー(本計測エコー)403を取得する。
RFパルス401から本計測エコー403までのステップ410を繰り返し、図5に示すように1枚の画像再構成に必要なエコー信号の組み1051を得る。繰り返し回数は通常128、256などである。エコー信号の組み1051には繰り返し回数と同数のナビゲーションエコー102(1021,1022,1023・・・)と本計測エコー106(1061,1062,1063・・・)が含まれる。
【0012】
これら本計測エコー106を同じ繰り返し内で計測されたナビゲーションエコー102を用いて体動補正する(図1、処理103、104)。即ち、まずエコー信号の組み1051に含まれるナビゲーションエコーのうちのーつ(例えば最初に取得したナビゲーションエコー1021)を体動補正の基準ナビゲーションエコー1011とする。この基準ナビゲーションエコー1011に対し、各繰り返しで計測したナビゲーションエコー102(1021、1022、1023…)の信号変化を検出し(処理103)、この変化量105に基づき同じ繰り返し内で計測したエコー106(1061,1062,1063・・・)を補正し(処理104)、補正後の信号S'1(n,t)を得る。尚、tは読み出し方向の点を表し、例えば0≦t≦256を満たす整数である。nは繰り返し番号であり、例えば0≦n≦256を満たす整数である。nが同じ場合は、同一の繰り返し内で取得した信号であることを示す。
【0013】
ナビゲーションエコーを用いた体動検出(処理103)は、例えばナビゲーションエコーの信号の位相変化やナビゲーンョンエコーを1次元フーリエ変換したデータの位置変化を用いて行うことができる。体動補正(処理104)は、複素差分により本計測エコー信号の位相変化を取り除く方法等によって行うことができ、計測した空間(計測空間)や、信号を1次元フーリエ変換した空間(ハイブリッド空間)で行ってもよい。さらに、プリスキャン時に取得したナビゲーションエコーを基準として、動き検出や体動補正を行なってもよい。
【0014】
連続撮影では、図4に示すパルスシーケンスを繰り返すことによって図5に示すようなエコー信号の組み1052、1053・・・が順次得られるので、これらについて上記処理103、104と繰り返し、それぞれの画像についてエコー間の動きが補正された信号108(S'i(n,t))(iはコイル番号を表す。この実施例では1≦i≦4である。以下同じ)を得る。
このようなエコー信号の組み108は、4つの小型コイルについてそれぞれ得られ、各々を重み付けした後合成し、1枚の画像を再構成する。このために重み付けに用いる重みマップ115を4つの小型コイルから得られた信号の組みを用いて計算する。重みマップ計算部111の処理は、主としてエコー信号108にローパスフィルタをかける処理112、ローパスフィルタをかけた後の信号をフーリエ変換する処理113およびフーリエ変換後のデータを元に重み計算する処理114からなり、画像データにかける重みを小型コイルの座標毎に求めた重みマップWi(x,y)を作成する。尚、計測開始時に用いる重みマップ115は、予め計測したコイルの感度分布に基づき計算したものであってもよい。
【0015】
重みマップ115は、1枚の画像のためのエコー信号取得から次の画像のためのエコー信号取得までの間(画像間)に動きがない場合には、次の画像の合成にも前の画像合成に用いた重みマップがそのまま使用されるが
、画像間に動きが検出された場合には、新たに取得された信号108を用いて更新される。
この画像間の動き検出には、エコー間の動きを補正するために取得されたナビゲーションエコーを利用する。即ち、図5に示す各エコー信号の組み1051、1052、1053・・・に含まれるナビゲーションエコーのうち1つのナビゲーションエコー、例えば体動補正の基準としたナビゲーションエコー101(1011,1012,1013・・・)を画像間で生じた被検体等の動きを検出するために使用する。
【0016】
画像間の動きを検出するために、各信号の組みのナビゲーションエコー1011、1012、1013・・・のうちの一つ、例えば最初のエコー信号の組み1051に含まれるナビゲーションエコー1011を画像間の動きを検出するための基準ナビゲーションエコー109とする。この基準ナビゲーションエコー109とナビゲーションエコー1011、1012、1013・・・との信号変化を検出する(処理110)。この信号変化を検出する処理110は、前述の体動検出処理103と基本的には同じであるが、この場合その後の補正処理を伴わないので、信号の位相変化のみからでも判断できる。そして、例えば基準ナビゲーションエコー109とナビゲーションエコー1012との信号に所定の変化があった場合にはエコー信号の組み1051の取得とエコー信号1052の組み取得との間に被検体の位置が変化したと判断し、重みマップ計算(処理111)を行ない、重みマップ115を新たに計算されたものに更新する。
【0017】
このように連続撮影を行ないながら画像間の動きをモニターし、動きがある時には重みマップ115を更新し、動きが検出されない場合にはそのまま従前の重みマップを使用する。
重みマップ115を用いた信号合成および画像再構成の処理を図6に示す。図中、符号1161〜1164は4つの小型コイルについての図3の処理を表し、これら処理1161〜1164により、各々小型コイルで取得され且つ体動補正された信号1171〜1174と各小型コイルについての重みマップ1181〜1184が出力される。信号1171〜1174はフーリエ変換された後(処理8011〜8014)、信号合成される(処理802)。こうして画像803が得られる。なお、信号合成104は、「マルチプルコイルによる頭頚部MRIの広視野高感度化(MEDICAL IMAGING TECHNOLOGY, Vol. 15, Mp. 6, November 1997)」に記載される技術を適用してもよい。
【0018】
このように連続撮影において、体動補正に用いるナビゲーションエコーを利用して画像間の動きを検出し、動きの生じたときだけ重みマップを更新するようにしたことにより、重みマップ計算量を大幅に削減することができ、連続画像形成の間隔を短縮することができる。
【0019】
以上の実施例では4つの小型コイルからなるマルチプルコイルを用いた場合を説明したが、小型コイルの数は上記実施例に限定されない。また本発明は複数の小型コイルからの信号を合成して画像を再構成するMRI装置であれば適用でき、例えば小型コイルの一部が他の小型コイルとは物理的に独立して設置可能なものであってもよい。またコイルの絶対位置が被検体の体動により変化する場合を説明したが、コイル自体が動くことにより絶対位置が変化する場合にも本発明を適用することができる。
【0020】
図7に、本発明の第2の実施例として4個の小型コイル5021〜5024と、カテーテル701の先に装着された小型コイル5025とを用いた場合を示す。この場合、被検体602に動きが無くても、カテーテル701が被検体602内部を移動するのに伴い、画像内でコイルの位置が変化する。即ち、カテーテルは図7(a)に示す位置から図7(b)に移動し、このカテーテルの移動に伴い、先端に装着したコイル5025が移動し、感度分布702も変化する。
【0021】
この実施例でも各小型コイル5021〜5025の感度分布6011〜6014、702から重みマップを計算し、信号を合成して画像を得る点は前述の実施例と同様であり、コイル5025について計測したナビゲーションエコーの変化から動きがあったことを検出し(図3、処理110)、重みマップ計算を行う(処理111)。但し、この場合、小型コイル5021〜5024は移動していないため、感度分布6011〜6014に基づく重みマップは前に計算したものをそのまま使用し、小型コイル5025についてのみ新たな重みマップに更新する。
尚、図7に示す実施例において、カテーテルの動きが連続している場合には、カテーテルに装着された小型コイルについて常に重みマップを更新することとし、小型コイル5021〜5024についてのみ図3の処理110、111を行なうようにしてもよい。即ち、図3の処理は複数の小型コイルの一部について行なうこともできる。
【0022】
以上、本発明を図面に示す実施例に基づき説明したが、本発明はこれら実施例に限定されず本発明の特許請求の範囲内に記載される範囲で種々の変更が可能である。例えば撮像シーケンスとしては図4に示すスピンエコーシーケンスの他、ファーストスピンエコー法やエコープラナー(EPI)法によるシーケンスなど任意のシーケンスを採用することができる。またナビゲーションエコーについても読み出し方向のナビゲーションエコーのみならず3Dイメージングのスライスエンコード方向、2Dイメージングの位相エンコード方向のナビゲーションエコーやオービタルナビゲーションエコーを用いてもよい。またナビゲーションエコーは2軸以上について発生させてもよい。
【0023】
さらに図3に示す実施例では、各繰り返し毎にナビゲーションエコーを発生させて繰り返し毎に本計測エコーの体動補正することとし、その体動補正用のナビゲーションエコーを画像間の動きの検出に用いた場合を説明したが、このような体動補正処理を行なわない場合であっても本発明を適用することが可能である。即ち、図8に示すように1つの画像を構成するエコー信号の組み毎に少なくとも1つのナビゲーション101を発生するパルスシーケンスを実行し、このナビゲーションエコーの基準ナビゲーションエコーに対する信号変化から画像間の動きを検出し、動きがあったときに重みマップ115の計算を行なうようにする。
図8の実施例はEPIシーケンスのように1回の繰り返しで1枚の画像に必要なエコー信号の組みを計測できるシーケンスを採用し、エコー間で体動補正する必要のない場合に特に好適である。
【0024】
【発明の効果】
本発明によれば、複数の小型受信コイルを用いたMRI装置の連続撮影において小型受信コイルの絶対位置に変化があったときのみ信号合成用の重みマップを計算するようにしたので、信号処理における装置的負担を軽減するとともに計算量が少なくなることにより画像表示のリアルタイム性を向上することができる。
【図面の簡単な説明】
【図1】本発明が適用されるMRI装置の概要を示すブロック図。
【図2】図1のMRI装置の受信プローブおよび信号処理系を示す図。
【図3】本発明のMRI装置における信号処理の一実施例を示す図。
【図4】撮像のためのパルスシーケンスの一例を示す図。
【図5】本発明のMRI装置における信号処理を説明する図。
【図6】本発明のMRI装置における信号処理を説明する図。
【図7】本発明が適用されるマルチプルコイルの他の実施例を示す図。
【図8】本発明のMRI装置における信号処理の他の実施例を示す図。
【図9】マルチプルコイルを用いた連続撮影を説明する図。
【符号の説明】
1 被検体
2 静磁場磁石
3 傾斜磁場コイル
4 コイル
5 プローブ
6 信号検出部
7 信号処理部
8 表示
11 制御部
Claims (8)
- 複数の小型受信コイルからなる受信プローブと、
前記受信プローブを用いて被検体からの核磁気共鳴信号の計測を制御する計測制御手段と、
前記小型受信コイルの各々で受信した核磁気共鳴信号から小型受信コイル毎の画像を作成し、該小型受信コイル毎の画像を重み付けて合成し、合成画像を得る信号処理手段と、
前記被検体の体動情報を検出する体動情報検出手段と、
を備えた磁気共鳴イメージング装置において、
前記受信プローブを用いた前記核磁気共鳴信号の計測と、前記体動情報の検出と、前記合成画像の作成と、を繰り返す場合に、
前記信号処理手段は、前記体動情報に基づいて、前記小型受信コイル毎の画像を合成する際の重みを更新することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記信号処理手段は、前記合成画像の作成を繰り返す際に、前記被検体の体動が検出された場合に前記重みを更新して用い、前記被検体の体動が検出されない場合に前記重みを更新せずに直前に求めた重みを用いることを特徴とする磁気共鳴イメージング装置。 - 請求項2記載の磁気共鳴イメージング装置において、
前記計測制御手段は、前記小型受信コイル毎に、画像の再構成に必要な複数の前記核磁気共鳴信号の計測を制御し、
前記体動情報検出手段は、前記小型受信コイル毎に、複数の前記体動情報を検出し、
前記信号処理手段は、前記複数の体動情報の一つを基準情報とし、該基準情報と他の体動情報との差異に基づいて、前記画像の再構成に必要な複数の核磁気共鳴信号を補正することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記体動情報検出手段は、複数の前記体動情報を検出し、
前記信号処理手段は、前記複数の体動情報の一つを基準情報とし、該基準情報と他の体動情報との合成画像間の差異に基づいて、前記重みを更新することを特徴とする磁気共鳴イメージング装置。 - 複数の小型受信コイルからなる受信プローブと、
前記受信プローブを用いて被検体からの核磁気共鳴信号の計測を制御する計測制御手段と、
前記小型受信コイルの各々で受信した核磁気共鳴信号から小型受信コイル毎の画像を作成し、該小型受信コイル毎の画像を重み付けて合成し、合成画像を得る信号処理手段と、
を備えた磁気共鳴イメージング装置において、
前記核磁気共鳴信号に基づいて前記小型受信コイルの各々の位置変化情報を検出する位置変化情報検出手段を有し、
前記受信プローブを用いた前記核磁気共鳴信号の計測と、前記位置変化情報の検出と、前記合成画像の作成と、を繰り返す場合に、
前記信号処理手段は、前記位置変化情報に基づいて、前記小型受信コイル毎の画像を合成する際の重みを更新することを特徴とする磁気共鳴イメージング装置。 - 請求項5記載の磁気共鳴イメージング装置において、
前記小型受信コイルの一つは、被検体に挿入されたカテーテルに配置された受信コイルであり、
前記信号処理手段は、前記カテーテルが移動した場合に、前記カテーテルに配置された受信コイルに対応する前記重みを更新することを特徴とする磁気共鳴イメージング装置。 - 請求項1乃至6のいずれか一項に記載の磁気共鳴イメージング装置において、
前記信号処理手段は、前記小型受信コイルで計測された前記核磁気共鳴信号に基づいて、該小型受信コイルに対応する重みを求めることを特徴とする磁気共鳴イメージング装置。 - 請求項7に記載の磁気共鳴イメージング装置において、
前記信号処理手段は、前記小型受信コイルで計測された前記核磁気共鳴信号にローパスフィルタを施した後にフーリエ変換したデータに基づいて、前記重みを求めることを特徴とする磁気共鳴イメージング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09519899A JP4343317B2 (ja) | 1999-04-01 | 1999-04-01 | 磁気共鳴イメージング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09519899A JP4343317B2 (ja) | 1999-04-01 | 1999-04-01 | 磁気共鳴イメージング装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000287949A JP2000287949A (ja) | 2000-10-17 |
| JP2000287949A5 JP2000287949A5 (ja) | 2006-05-25 |
| JP4343317B2 true JP4343317B2 (ja) | 2009-10-14 |
Family
ID=14131064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP09519899A Expired - Fee Related JP4343317B2 (ja) | 1999-04-01 | 1999-04-01 | 磁気共鳴イメージング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4343317B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7988715B2 (en) | 2003-05-14 | 2011-08-02 | Spectracure Ab | System and method for therapy and diagnosis comprising translatory distributor for distribution of radiation |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6876201B2 (en) * | 2001-02-23 | 2005-04-05 | Hitachi Medical Corporation | Magnetic resonance imaging apparatus and method |
| JP4443079B2 (ja) | 2001-09-13 | 2010-03-31 | 株式会社日立メディコ | 磁気共鳴イメージング装置及び磁気共鳴イメージング装置用rf受信コイル |
| JP4047628B2 (ja) * | 2002-05-16 | 2008-02-13 | 株式会社日立メディコ | カテーテルrfアンテナを用いた磁気共鳴イメージング装置 |
| US7282917B1 (en) * | 2006-03-30 | 2007-10-16 | General Electric Company | Method and apparatus of multi-coil MR imaging with hybrid space calibration |
| JP5337406B2 (ja) * | 2008-05-23 | 2013-11-06 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| JP5601678B2 (ja) * | 2009-09-30 | 2014-10-08 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 磁気共鳴イメージング装置 |
| JP5733490B2 (ja) * | 2010-05-27 | 2015-06-10 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 磁気共鳴イメージング装置およびプログラム |
| WO2013144791A1 (en) * | 2012-03-26 | 2013-10-03 | Koninklijke Philips N.V. | Through-plane navigator |
| US9416652B2 (en) | 2013-08-08 | 2016-08-16 | Vetco Gray Inc. | Sensing magnetized portions of a wellhead system to monitor fatigue loading |
-
1999
- 1999-04-01 JP JP09519899A patent/JP4343317B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7988715B2 (en) | 2003-05-14 | 2011-08-02 | Spectracure Ab | System and method for therapy and diagnosis comprising translatory distributor for distribution of radiation |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000287949A (ja) | 2000-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10444315B2 (en) | MRI with motion correction using navigators acquired using a dixon technique | |
| JP6998218B2 (ja) | 動き検出を用いるmr撮像 | |
| JP5198859B2 (ja) | 位相マッピングと、位相基準として用いる基準媒体が関係するmri温度測定 | |
| JP6084573B2 (ja) | マルチポイントディクソン技術を用いるmr撮像 | |
| US7372269B2 (en) | Magnetic resonance imaging method and apparatus | |
| JP3869337B2 (ja) | 磁気共鳴撮影装置 | |
| RU2580189C2 (ru) | Интервенционная мр-томография с компенсацией движения | |
| US7768264B1 (en) | Method and apparatus for MR image reconstruction using correlation values | |
| JP2000229073A (ja) | 磁気共鳴画像装置 | |
| JPH11113878A (ja) | 磁気共鳴イメージング方法 | |
| JP2004527301A (ja) | 連続的テーブル移動を使用して大視野からmriデータを取得する方法 | |
| JPH08243088A (ja) | Mr方法および該方法を実施するためのmr装置 | |
| JP2013509904A (ja) | ナビゲータを使用するmrイメージング | |
| JP4072879B2 (ja) | 核磁気共鳴撮影装置 | |
| JP4343317B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2017529960A (ja) | アーチファクト抑制を有するプロペラmrイメージング | |
| JP2004000593A (ja) | 画像再構成するための方法及び装置 | |
| JP2002301044A (ja) | 磁気共鳴画像診断装置 | |
| JP5722212B2 (ja) | 磁気共鳴イメージング装置及び方法 | |
| JP2005040416A (ja) | 磁気共鳴イメージング装置 | |
| JP2952228B1 (ja) | 連続mri画像再構成方法及び装置 | |
| JP4391214B2 (ja) | 磁気共鳴イメージング装置 | |
| JP3977067B2 (ja) | 磁気共鳴イメージング装置 | |
| JP5421600B2 (ja) | 核磁気共鳴イメージング装置および核磁気共鳴イメージング装置の作動方法 | |
| JP3573570B2 (ja) | 磁気共鳴イメージング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060329 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090706 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090709 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130717 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |