JP4326663B2 - 船舶の海上位置保持装置及び方法 - Google Patents
船舶の海上位置保持装置及び方法 Download PDFInfo
- Publication number
- JP4326663B2 JP4326663B2 JP2000071214A JP2000071214A JP4326663B2 JP 4326663 B2 JP4326663 B2 JP 4326663B2 JP 2000071214 A JP2000071214 A JP 2000071214A JP 2000071214 A JP2000071214 A JP 2000071214A JP 4326663 B2 JP4326663 B2 JP 4326663B2
- Authority
- JP
- Japan
- Prior art keywords
- resistance plate
- wind
- ship
- hull
- propulsion means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Landscapes
- Other Liquid Machine Or Engine Such As Wave Power Use (AREA)
Description
【発明の属する技術分野】
本発明は、船舶を定点保持する船舶の海上位置保持装置(DPS:Dynamic Positioning System)及び方法に関する。
【0002】
【従来の技術】
上記海上位置保持装置は、例えば水深が比較的深い海洋上における資源探査等において、係留することなく、風や波あるいは潮流の影響を排除して回転式のスラスタ等の推進手段の推力によって船舶を定点保持するためのものである。このような海上位置保持装置を装備した船舶は、通常、大出力のスラスタを多数装備し、各スラスタが発生する推力の総合推力によって船舶を定点保持する。
【0003】
【発明が解決しようとする課題】
ところで、上記スラスタは、応答性能を確保するために電動機によって駆動されている。上述した海上位置保持装置を装備した船舶は、このような電動機駆動の大出力のスラスタを多数装備しているので、動力供給源として必然的に大容量の発電機を必要とする。スラスタの起動時には、通常駆動時に比べて大きな電力を消費する。上記発電機は、このスラスタ起動時に十分な電力をスラスタに供給することが求められる。
【0004】
しかし、このような大容量の発電機を船舶に備えることは、コスト的にも、また設置スペース的にも好ましくない。また、この種の船舶では、発電機の設置に比較的大きなスペースを必要とするために、船舶を小型化できなかったという問題点もある。したがって、この発電機の容量を低減して、海上位置保持装置に必要とされるコストの低減が強く要望されていた。また、発電機の場合、容量の低減は小型化と同義であり、容量を低減することによって船舶内の設置スペースの削減を図ることが可能である。
【0005】
本発明は、上述する問題点に鑑みてなされたもので、以下の点を目的とするものである。
(1)海上位置保持装置を装備した船舶の動力削減を図る。
(2)海上位置保持装置を装備した船舶のコスト低減を図る。
(3)海上位置保持装置を装備した船舶における動力源の設置スペースの削減を図る。
(4)海上位置保持装置を装備した船舶の小型化を図る。
【0006】
【課題を解決するための手段】
上記目的を達成するために、本発明では、船舶の海上位置保持装置に係わる第1の手段として、推進手段の推力によって洋上における船舶の位置を定点保持する海上位置保持装置において、風検出部と、船体から水中に突出して設けられる抵抗板と、該抵抗板の向きを設定する角度設定部と、風検出部の風検出信号に基づいて、風向に対して抵抗板を直交させる直交指示信号を角度調節部に出力する補助動力制御部とを具備する手段を採用する。
【0007】
また、船舶の海上位置保持装置に係わる第2の手段として、上記第1の手段において、補助動力制御部は、推進手段が停止している状態において風を検知すると、推進手段が作動するまでの間のみ直交指示信号を角度調節部に出力するという手段を採用する。
【0008】
船舶の海上位置保持装置に係わる第3の手段として、上記第2の手段において、補助動力制御部は、推進手段が作動すると、抵抗板が推進手段の負荷とならない向きとさせる解除指示信号を角度調節部に出力するという手段を採用する。
【0009】
一方、本発明では、船舶の海上位置保持方法に係わる第1の手段として、推進手段の推力によって洋上における船舶の位置を定点保持する方法において、船体から水中に突出する抵抗板を設け、該抵抗板の向きを洋上の風向きと直交するように設定するという手段を採用する。
【0010】
船舶の海上位置保持方法に係わる第2の手段として、上記第1の手段において、推進手段が停止している状態において風を検知すると、推進手段が作動するまでの間のみ抵抗板の向きを洋上の風向と直交する向きとするという手段を採用する。
【0011】
船舶の海上位置保持方法に係わる第3の手段として、上記第2の手段において、推進手段が作動すると、抵抗板の向きを推進手段の負荷とならない向きとするという手段を採用する。
【0012】
【発明の実施の形態】
以下、本発明に係わる船舶の海上位置保持装置及び方法の一実施形態について、図面を参照して説明する。
【0013】
図1は、本実施形態に係わる海上位置保持装置のシステム構成図である。この図において、符号1は船体、2は風向計(風検出部)、3は補助動力制御部、4は角度設定部、5は抵抗板、6はGPSアンテナ、7は本体制御装置、8A,8Bはスラスタである。これら各構成要素のうち、風向計2、補助動力制御部3、角度設定部4、抵抗板5、GPSアンテナ6、本体制御装置7及びスラスタ8A,8Bは、本実施形態の海上位置保持装置を構成するものである。また、風向計2、補助動力制御部3、角度設定部4及び抵抗板5は、本実施形態の特徴部分を構成するものである。
【0014】
風向計2は、洋上の風の発生とその風向を検出し、風検出信号aとして補助動力制御部3及び本体制御装置7に出力するものである。補助動力制御部3は、上記風検出信号a及び本体制御装置7から入力されるスラスタ作動信号bに基づいて直交指示信号c及び解除指示信号dを生成し、該直交指示信号cあるいは解除指示信号dを角度設定部4に出力することにより当該角度設定部4を制御するものである。
【0015】
角度設定部4は、直交指示信号c及び解除指示信号dに基づいて抵抗板5の水平面内における角度(向き)を設定するものである。この角度設定部4は、例えばサーボ機能を備えたモータであり、回転軸の回転によって当該回転軸に取り付けられた抵抗板5の角度を設定するものである。抵抗板5は、船体1の船底部から垂直状態で水中に突出するように設けられた平板であり、上記角度設定部4を介して船体1に支持されている。すなわち、この抵抗板5は、その平面が船底部の船体外板に垂直する状態で船体1に支持されたものであり、当該平面の船体外板に平行な面内における角度は、上記角度設定部4によって設定されるようになっている。
【0016】
GPSアンテナ6は、周知のGPS(Global Positioning System)衛星が発信する電波を受信するためのものであり、そのGPS受信信号eを本体制御装置7に出力するものである。本体制御装置7は、本海上位置保持装置を統括的に制御すると共に、上記GPS受信信号eに基づいて所定のタイムインターバルで船体1の洋上位置(緯度及び経度)を算出し、その計算結果に基づいてスラスタ8A,8Bを作動させることによって船体1の洋上位置を定点維持させるものである。なお、この本体制御装置7は、スラスタ8A,8Bを作動の有無をスラスタ作動信号bとして補助動力制御部3に出力するように構成されている。
【0017】
スラスタ8A,8Bは、電動機によって駆動される周知の回転式の推進手段であり、回転によって設定された方向に推力を発生することにより船体1を定点維持させるものである。なお、図1では、船首近傍の船底部及び船尾近傍の船底部にそれぞれスラスタ8Aとスラスタ8Bとを設けた状態を示しているが、推進手段の個数や設置場所は、これに限定されるものではない。
【0018】
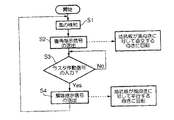
次に、このように構成された本海上位置保持装置の動作について、図2に示すフローチャートに沿って詳説する。なお、このフローチャートは、補助動力制御部3の処理手順を示すものである。
【0019】
まず、船体1が係留することなく所望位置Aに停止している状態では、風や潮流あるいは波浪等の影響によって、船体1の位置は所望位置Aから徐々に移動する。本体制御装置7は、この移動をGPSアンテナ6のGPS受信信号eから算出した洋上位置Bに基づいて検知し、スラスタ8A,8Bを作動させることにより船体1を上記所望位置Aに復帰させて定点保持させる。このような動作は、従来の海上位置保持装置においても同様であるが、本実施形態の海上位置保持装置では、上記特徴部分の以下のような動作によって、スラスタ8A,8Bの作動タイミングを従来よりも遅らせることが可能であり、またスラスタ8A,8Bの起動時における出力を従来よりも抑えることができる。
【0020】
すなわち、補助動力制御部3は、所定のタイムインターバルで風検出信号aを取り込み、該風検出信号aに基づいて洋上に風が吹き始めたことを検知すると(ステップS1)、風検出信号aに基づいて風向きさらに検知し、直交指示信号cを角度設定部4に出力する(ステップS2)。この直交指示信号cは、抵抗板5を風向きに対して直交させることを角度設定部4に指示するものである。このような直交指示信号cが入力されると、角度設定部4は、抵抗板5を風向きに対して直交させるべく、抵抗板5を所定角度だけ回転させる。
【0021】
ここで、補助動力制御部3は、風検出信号aに基づいて風の吹き始めを検知して直交指示信号cを角度設定部4に出力するので、抵抗板5は、風の影響によって船体1が所望位置Aから移動する前段階で風向きに対して直交する状態に角度設定されることになる。これに対して、本体制御装置7によってスラスタ8A,8Bが作動されるタイミングは、所望位置Aと洋上位置Bとの間に予め決められた一定の差異が生じた時点であり、すなわち風の影響によって当該差異だけ船体1が所望位置Aから移動した時点である。したがって、抵抗板5は、風の影響によって船体1が所望位置Aから移動する前段階、つまりスラスタ8A,8Bが作動する前に風向きに対して直交する状態に角度設定される。
【0022】
例えば、図3に示すように船体1に風による外力F1が作用する。これに対して、抵抗板5は、この風の向きつまり外力F1の向きに対して直交するように角度設定されるので、抵抗板5の形状に応じた水(例えば海水)の抗力F2が外力F1とは逆向きに発生する。すなわち、この抗力F2は外力F1に対向する力であり、当該抗力F2によって外力F1が減じられるため、船体1は、当該抗力F2が生じない場合に比較して所定の単位時間に移動する量が小さくなり、容易に移動し難くなる。
【0023】
したがって、本実施形態では、このような抵抗板5の作用によって、従来に比較してスラスタ8A,8Bの作動タイミングを送らせる、あるいはスラスタ8A,8Bの起動時における出力を抑えることが可能であり、これによってスラスタ8A,8Bの作動に必要な動力(すなわち電力)を削減することが可能である。また、このようにして動力を削減することによりスラスタ8A,8Bの動力源である発電機の容量を小さくすることが可能であり、よって船舶のコスト低減、発電機の設置スペースの削減、また船舶の小型化を図ることが可能となる。
【0024】
一方、補助動力制御部3は、直交指示信号cを角度設定部4に出力した後、スラスタ8A,8Bが作動したことを示すスラスタ作動信号bが入力されると(ステップS3)、解除指示信号dを角度設定部4に出力する(ステップS4)。この解除指示信号dは、抵抗板5を風向きに対して平行にさせることを角度設定部4に指示するものである。
【0025】
このような解除指示信号dが入力されると、角度設定部4は、抵抗板5を風向きに対して平行にさせるべく、抵抗板5を90度だけ回転させる。この結果、抵抗板5に作用する水の抗力がスラスタ8A,8Bの負荷となることを防止することができる。なお、抵抗板5によってスラスタ8A,8Bの負荷が増大すると、その分だけスラスタ8A,8Bの消費電力が増大するので、発電機の容量を小さくすることができない。
【0026】
〔抵抗板の形状の設定方法〕
上記抵抗板5に作用する抗力F2は、抵抗板5の平面の形状に応じた値となる。以下では、この抵抗板5の形状の設定方法の一例について説明する。
【0027】
まず、図4に示すように船体1及び抵抗板5の各部寸法を定義する。すなわち、Bは船幅、Lbpは有効船長、Dは船底から甲板までの高さ、dは喫水の深さ、aは抵抗板5の高さ、bは抵抗板5の横幅である。周知のように風を受けた船舶に作用する力は様々な形で整理されているが、ここでは、OCIMF(Oil Companies Marine Forum)によって整理されたものを適用する。
【0028】
また、このような船体1について、図5に示すx-y-z直交座標系を用いるものとする。すなわち、船体1の長手方向がX軸方向に該当し、また船幅方向がY軸方向に該当し、船体1の高さ方向がZ軸に該当するように各座標軸を設定する。このようなx-y-z直交座標系内に位置する船体1に対して、船首から右舷側に角度θの方向を風の向き(風向)とする。
【0029】
OCIMFでは、風(Wing)によって船舶に作用するX軸方向の力FXW及びY軸方向の力FYWは下式(1),(2)によって表される。
【0030】
【数1】

ここで、CXWはX軸方向の風圧力抵抗係数、CYWはY軸方向の風圧力抵抗係数、ρWは空気の密度、VWは風速、ATはX軸方向の投影面積、ALはY軸方向の投影面積である。OCIMFによれば、各方向の上記風圧力抵抗係数CXW,CYWは、図6のように与えられる。
【0032】
また、OCIMFによれば、潮流(Current)によって船舶に作用するX軸方向の力FXC及びY軸方向の力FYCは下式(3),(4)によって与えられる。
【0033】
【数2】
ここで、CXCはX軸方向の潮流力抵抗係数、CYCはY軸方向の潮流力抵抗係数、ρCは海水の密度、VCは潮流速度、(d・Lbp)は投影面積の代表値である。OCIMFによれば、各方向の上記潮流力抵抗係数CXC,CYCは、図7のように与えられる。この潮流による力FXC,FYCは、風によって水上を流される船体1が水から受ける抗力(横流れ抵抗力)に該当するものである。
【0035】
上記風によって船舶に作用する各力FXW,FYWを風向θの方向に合成した力FW1(風外力)は式(5)によって与えられる。
【0036】
【数3】
同様にして、風によって水上を流される船舶が水から受ける横流れ抵抗力FXC,FYCを風向θの方向に合成すると、式(6)となる。
【0038】
【数4】
該風外力FWと横流れ抵抗力FCとは釣り合い、下式(7)が成立する。
【0040】
【数5】
したがって、上式(5)〜(7)に基づいて船体1の横流れ速度VC(上記潮流速度)を求めると、下式(8)のように表される。
【0042】
【数6】
一方、抵抗板5の抵抗力Fは、上記船体1の横流れ速度VCを用いて下式(9)のように表される。ここで、CDは、抵抗板5の抵抗係数である。
【0044】
【数7】
このような抵抗板5を備えた船体1では、上記抵抗板5の抵抗力Fと横流れ抵抗力FCとの和が風外力FWとなるので、上述した式(7)は、下式(10)のように修正される。
【0046】
【数8】
この結果、当該式(10)に基づいく横流れ速度VC’は、下式(11)のように表される。
【0048】
【数9】
したがって、抵抗板5の存在に起因する横流れ速度VC’の減速効果(VC’/VC)は、下式(12)のように表される。
【0050】
【数10】
以上の理論的考察から、一例として風速50m/s、Lbp=200(m)、B=20(m)、D=20(m)、d=10(m)、a/b=10及びCD=1.22の条件の下で、抵抗板5が存在する場合の横流れ速度VC’及びその減速効果(VC’/VC)を風向θをパラメータとして算出すると、図8のようになる。この条件下で、例えば減速効果(VC’/VC)を30%程度とすると、抵抗板5の最適寸法は、a=4(m)、b=40(m)となる。また、横流れ速度VC’は最大で0.1(m/s)、抵抗板5にかかる力は最大で0.1(t)となる。この力は、一般船の舵にかかる力よりもかなり小さい値であり、十分に実現可能な値である。
【0052】
例えば、抵抗板5がない状態において横流れ速度VC=0.4(m/s)で3分間漂流すると、船体1は72(m)移動するが、抵抗板5を設けた状態で横流れ速度VC’=0.1(m/s)で3分間漂流すると船体1は18(m)、つまり抵抗板5がない状態に対して1/4の距離しか移動しないことになる。そして、風がない状態で船体1を10秒間で元の位置に戻すことを考えると、抵抗板5がない場合は、72/10=7.2(m/s)の移動速度が必要となり、抵抗板5を備える場合には18/10=1.8(m/s)の移動速度でよい。
【0053】
ここで、船体1はスラスタ8A,8Bの作動によって元の位置つまり所望位置Aに戻され、この際、抵抗板5は、解除指示信号dに基づく角度設定部4の作動によって風向に対して平行状態に設定される。したがって、船体1を所望位置Aに戻す際の水の抗力は、抵抗板5を設けた場合と設けない場合とでほぼ同等である。風がない状態で船体1を所望位置Aに戻す際に当該船体1に作用する抗力は、周知のように移動速度の2乗に比例するので、抵抗板5がない場合には例えば440(t)、これに対して抵抗板5が存在する場合には27(t)つまり抵抗板5がない場合に対して約1/16となる。
【0054】
スラスタ8A,8Bの仕事率は、上記抗力に移動速度を乗じて計算されるので、抵抗板5がない場合は例えば31000(kW)(≒440×7.2×9.8)、これに対して抵抗板5が存在する場合には480(kW)(≒27×1.8×9.8)となり、約2桁の差が生じる。スラスタ8A,8Bにおける仕事率と消費電力との関係は周知のようにほぼ比例関係にあるので、98.5(%)={(31000−480)/31000×100}、つまり最大で98.5(%)の電力を節約することができる。
また、上述したように、平均で30(%)の減速効果(VC’/VC)を得ようとする場合には、65.7(%)(=1/0.73×100)の電力を節約することが可能である。
【0055】
なお、上記実施形態では、スラスタ8A,8Bが作動すると、抵抗板5を風向に対して平行な向きとなるように回転させたが、抵抗板5を船体1内に収納する収納装置を別途備え、当該収納装置を上記スラスタ作動信号bに基づいて作動させるようにしても良い。このような収納装置を設けることにより、抵抗板5が船体1から全く突出しない状態を実現することができるので、抵抗板5がスラスタ8A,8Bに対して全く負荷とならないばかりか、船体1の通常航行時に抵抗板5が航行負荷となることをも防止することが可能である。
【0056】
【発明の効果】
以上説明したように、本発明に係わる船舶の海上位置保持装置及び方法によれば、以下のような効果を奏する。
【0057】
(1)請求項1及び4の発明によれば、推進手段の推力によって洋上における船舶の位置を定点保持するにあたり、船体から水中に突出する抵抗板を設け、該抵抗板の向きを洋上の風向きと直交するように設定するので、当該抵抗板に作用する水の抗力によって、船体が風による外力によって容易に流されないようにすることができる。すなわち、船体が一定時間ある強さの風を受けても、抵抗板に作用する水の抗力によって船体の移動量が抑えられる。この種の船舶では、船体が所定距離移動すると、推進手段を作動させて船体を所望位置に復帰させるが、抵抗板に作用によって船体が移動し難くなるので、推進手段を作動させるタイミングを従来よりも遅らせるあるいは推進手段の推力を低めに設定することが可能であり、よって推進手段の動力を削減することが可能である。さらに、この動力の削減の実現によって、動力源の容量を小さくすることが可能であり、よってこの種の船舶のコスト低減、動力源の設置スペースの削減、また船舶の小型化を実現することが可能である。
【0058】
(2)請求項2及び5の発明によれば、推進手段が停止している状態において風を検知すると、推進手段が作動するまでの間のみ抵抗板の向きを洋上の風向と直交する向きとするので、当該抵抗板に作用する水の抗力によって、風が吹き始めてから推進手段が作動するまでの間だけ船体が風による外力によって容易に流されないようにすることができる。したがって、推進手段を作動させるタイミングを従来よりも遅らせるあるいは推進手段の推力を低めに設定することが可能であり、よって推進手段の作動時における推進手段の動力を低減させることが可能である。
【0059】
(3)請求項3及び6の発明によれば、推進手段が作動すると、抵抗板の向きを推進手段の負荷とならない向きとするので、推進手段の定常作動に必要とされる動力が抵抗板の存在によって上昇することを防止することができる。
【図面の簡単な説明】
【図1】 本発明の一実施形態に係わる海上位置保持装置のシステム構成図である。
【図2】 本発明の一実施形態に係わる海上位置保持装置の動作を示すフローチャートである。
【図3】 本発明の一実施形態における抵抗板の作用を説明するための説明図である。
【図4】 本発明の一実施形態における抵抗板の形状の設定方法を説明するための船体形状図である。
【図5】 本発明の一実施形態における抵抗板の形状の設定方法を説明するための座標系である。
【図6】 本発明の一実施形態における抵抗板の形状の設定方法を説明するための風向−風圧力抵抗係数のグラフである。
【図7】 本発明の一実施形態における抵抗板の形状の設定方法を説明するための風向−横流れ抵抗係数のグラフである。
【図8】 本発明の一実施形態における抵抗板の形状の設定方法を説明するための風向−減速効果のグラフである。
【符号の説明】
1……船体
2……風向計
3……補助動力制御部
4……角度設定部
5……抵抗板
6……GPSアンテナ
7……本体制御装置
8A,8B……スラスタ
a……風検出信号
b……スラスタ作動信号
c……直交指示信号
d……解除指示信号
e……GPS受信信号
F1……外力
F2……抗力
Claims (6)
- 推進手段(8A,8B)の推力によって洋上における船舶の位置を定点保持する海上位置保持装置であって、
風検出部(2)と、
船体(1)から水中に突出して設けられる抵抗板(5)と、
該抵抗板(5)の向きを設定する角度設定部(4)と、
前記風検出部(2)の風検出信号に基づいて、風向に対して抵抗板(5)を直交させる直交指示信号を角度調節部(4)に出力する補助動力制御部(3)と、
を具備することを特徴とする船舶の海上位置保持装置。 - 補助動力制御部(3)は、推進手段(8A,8B)が停止している状態において風を検知すると、推進手段(8A,8B)が作動するまでの間のみ直交指示信号を角度調節部(4)に出力することを特徴とする請求項1記載の船舶の海上位置保持装置。
- 補助動力制御部(3)は、推進手段(8A,8B)が作動すると、抵抗板(5)が推進手段(8A,8B)の負荷とならない向きとさせる解除指示信号を角度調節部(4)に出力することを特徴とする請求項2記載の船舶の海上位置保持装置。
- 推進手段(8A,8B)の推力によって洋上における船舶の位置を定点保持する方法であって、
船体(1)から水中に突出する抵抗板(5)を設け、該抵抗板(5)の向きを洋上の風向きと直交するように設定することを特徴とする船舶の海上位置保持方法。 - 推進手段(8A,8B)が停止している状態において風を検知すると、推進手段(8A,8B)が作動するまでの間のみ抵抗板(5)の向きを洋上の風向と直交する向きとすることを特徴とする請求項4記載の船舶の海上位置保持方法。
- 推進手段が作動すると、抵抗板(5)の向きを推進手段(8A,8B)の負荷とならない向きとすることを特徴とする請求項5記載の船舶の海上位置保持方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000071214A JP4326663B2 (ja) | 2000-03-14 | 2000-03-14 | 船舶の海上位置保持装置及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000071214A JP4326663B2 (ja) | 2000-03-14 | 2000-03-14 | 船舶の海上位置保持装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001260989A JP2001260989A (ja) | 2001-09-26 |
| JP4326663B2 true JP4326663B2 (ja) | 2009-09-09 |
Family
ID=18589832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000071214A Expired - Lifetime JP4326663B2 (ja) | 2000-03-14 | 2000-03-14 | 船舶の海上位置保持装置及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4326663B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103092077A (zh) * | 2013-01-06 | 2013-05-08 | 中国海洋石油总公司 | 动力定位系统的推力分配方法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4638163B2 (ja) * | 2004-03-19 | 2011-02-23 | 三菱重工業株式会社 | 風車装置 |
| JP4750881B2 (ja) * | 2009-08-31 | 2011-08-17 | 三井造船株式会社 | 舶用エンジン制御システムおよび方法 |
| KR101067343B1 (ko) | 2010-12-27 | 2011-09-23 | 송경진 | 선박 추진장치 |
| CN103399576A (zh) * | 2013-08-02 | 2013-11-20 | 哈尔滨工程大学 | 打捞救助船动力定位控制系统及定位控制方法和救助船测距跟踪方法 |
| US9227703B2 (en) * | 2013-08-30 | 2016-01-05 | Jurong Shipyard Pte Ltd. | Buoyant structure for petroleum drilling, production, storage and offloading |
| CN107499486B (zh) * | 2017-07-28 | 2023-05-30 | 安徽工程大学 | 一种定位用智能水上移动平台及其定位方法 |
| CN107554721A (zh) * | 2017-09-15 | 2018-01-09 | 南通如港船舶配套机械有限公司 | 一种船舶动力定位方法 |
| JP7204575B2 (ja) * | 2019-05-09 | 2023-01-16 | 深田サルベージ建設株式会社 | 石基礎の構築方法 |
-
2000
- 2000-03-14 JP JP2000071214A patent/JP4326663B2/ja not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103092077A (zh) * | 2013-01-06 | 2013-05-08 | 中国海洋石油总公司 | 动力定位系统的推力分配方法 |
| CN103092077B (zh) * | 2013-01-06 | 2016-03-09 | 中国海洋石油总公司 | 动力定位系统的推力分配方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001260989A (ja) | 2001-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210166568A1 (en) | Collision avoidance systems and methods | |
| JP2926533B2 (ja) | 船舶の自動定点復帰制御方法 | |
| JP4326663B2 (ja) | 船舶の海上位置保持装置及び方法 | |
| JP2016512802A (ja) | 海洋モニタリングのための自律式セイルボート | |
| JP2007532408A5 (ja) | ||
| CN107416127A (zh) | 一种“鱼型”半潜式无人艇 | |
| CN108069011B (zh) | 船用驱动装置和用于运行船用驱动装置的方法 | |
| KR101380722B1 (ko) | 부유식 해양 구조물의 동적 위치 유지 시스템 및 방법 | |
| US7918696B2 (en) | System and method for dynamic energy recovery in marine propulsion | |
| Bowker et al. | Experimental analysis of submerged flapping foils; implications for autonomous surface vehicles (ASVs) | |
| US8858277B2 (en) | System and method for dynamic energy recovery in marine propulsion | |
| Wang et al. | Design of an autonomous surface vehicle used for marine environment monitoring | |
| JP2018171939A (ja) | 雑音制御装置、船舶、雑音制御方法及びプログラム | |
| US20200010151A1 (en) | Omni direct modular multi-hull hydrofoil vessel integrated with renewable-energy sources | |
| CN206719471U (zh) | 一种“鱼型”半潜式无人艇 | |
| JP2004182096A (ja) | 船舶、船舶の航行装置、船舶の舵角制御装置および船舶の舵角制御方法 | |
| KR20150026411A (ko) | 예인 제어 시스템 및 그의 위치 제어 방법 | |
| US11767090B2 (en) | Systems and methods for integrated wave power charging for ocean vehicles | |
| US20060196403A1 (en) | Stable, high-speed marine vessel | |
| CN114179961A (zh) | 姿态自适应式水面双体无人平台 | |
| JP3975090B2 (ja) | 船舶 | |
| KR102227893B1 (ko) | 스러스터를 이용한 예인 안정성 부가시스템 | |
| Minami et al. | Investigation into underwater fin arrangement effect on steady sailing characteristics of a sail assisted ship | |
| WO2019229633A1 (en) | An autonomous surface vessel | |
| CN113439055B (zh) | 控制装置、具备该控制装置的船舶以及船舶的控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20070130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090602 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090610 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120619 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4326663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120619 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130619 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130619 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130619 Year of fee payment: 4 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |