JP4320409B2 - 磁気軸支電気駆動装置 - Google Patents
磁気軸支電気駆動装置 Download PDFInfo
- Publication number
- JP4320409B2 JP4320409B2 JP50349299A JP50349299A JP4320409B2 JP 4320409 B2 JP4320409 B2 JP 4320409B2 JP 50349299 A JP50349299 A JP 50349299A JP 50349299 A JP50349299 A JP 50349299A JP 4320409 B2 JP4320409 B2 JP 4320409B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- winding
- windings
- rotor
- electric drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 103
- 238000004804 winding Methods 0.000 claims description 73
- 230000005284 excitation Effects 0.000 claims description 10
- 229910052751 metal Inorganic materials 0.000 claims description 5
- 239000002184 metal Substances 0.000 claims description 5
- 239000011248 coating agent Substances 0.000 claims description 2
- 238000000576 coating method Methods 0.000 claims description 2
- 238000012544 monitoring process Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 13
- 238000009826 distribution Methods 0.000 description 7
- 230000001419 dependent effect Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 230000005294 ferromagnetic effect Effects 0.000 description 3
- 230000005415 magnetization Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- AZDRQVAHHNSJOQ-UHFFFAOYSA-N alumane Chemical group [AlH3] AZDRQVAHHNSJOQ-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000003749 cleanliness Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229940127554 medical product Drugs 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000007788 roughening Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/0493—Active magnetic bearings for rotary movement integrated in an electrodynamic machine, e.g. self-bearing motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/02—Details
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/09—Structural association with bearings with magnetic bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2380/00—Electrical apparatus
- F16C2380/26—Dynamo-electric machines or combinations therewith, e.g. electro-motors and generators
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
駆動系における回転部の速度、寿命、清浄度及び気密性に関して極めて高いレベルの要求事項に対応しようとする機械および装置構造の応用分野が、磁気を用いた軸支技術によって切り開かれた。この応用分野は、従来の軸支技術を用いては実質的に実現不可能な、あるいは実現が非常に困難なものであった。例えば、磁気軸受を既に備えた例として、高速フライス盤や研削盤の主軸、ターボ圧縮機、真空ポンプ、あるいは高純度の化学製品や医療製品用のポンプ等、様々な実施例が挙げられる。
従来の磁気軸支電気機械(図1)には、機械ユニット1に加えて、2つの各ラジアル磁気軸受2および3、アキシャル磁気軸受4、2つの各機械式遮断軸受5および6、またモータや磁気軸受巻線を励磁するための合計13個の出力制御装置7、8、9及び10が必要である。
機械とラジアル磁気軸受を磁気固定子ユニットに一体化するための方法が添付資料(図2)に提案されている。駆動巻線及び軸支巻線用として、2つの分離式巻線系11及び12が固定子溝に多層構造の状態で導入されている。両巻線系は3つのループを有し、磁極対の数において一つ異なる。これらのコイルは、複数の溝にまたがって配置されている。図2に挙げた例は、以下のことを示す。
− 4磁極機械巻線11(外側)は、第1のループ13、第2にループ14、第3のループ15を含み、
− 2磁極軸支持巻線12(内側)は、第1のループ16、第2のループ17、第3のループ18を含む。
回転子から固定子、或いは固定子から回転子方向の矢印(参照符号無し)は、4つの磁気回転子部の磁化方向(例えば、半径方向すなわち直径方向への磁化)を示す。
剛性軸回転子の案内が必要でない用途、例えば換気装置、送風機、ポンプ或いは混合機等の用途においては、アキシャル磁気軸受及び第2のラジアル磁気軸受は、機械磁気軸受を一体化した本実施例からは除かれている。これに対する必要条件として、回転子の直径に対して長手方向の長さが短い寸法を有する円板形状の回転子(図3)の実施例がある。このように、固定子39と回転子40間に生じる磁気力41によって、軸方向及び傾斜方向における回転子位置が安定化される。
しかしながら、多くの場合、磁気軸支技術の利用に際しては、複雑で高価なシステム構造および、それに伴うより高い製造コストが障害となる。従って、本発明の目的は、機械及び磁気軸受ユニットの機械的構造の簡略化から成るが、これは、この目的に適する電子的励起方法を考慮した上でのものである。
本発明のこの目的は、独立請求項の特長によって達成される。好適な実施例の変形例は、従属請求項の特長によって特徴付けられる。本発明の目的を達成することにより得られる特有の利点としては、固定子或いは回転子の構造を各々大きく簡略化できること、また従来から知られている解決策に対応した磁気軸受機械の巻線構造を有すること、また電源制御装置を削減できることである。例えば、磁気軸受単相モータには3つのループ及び6つのコイルのみがあれば充分である。
本発明の実施例について、図面を参照して以下に説明する。図面に示す内容は以下の通りである。
図1は、従来の磁気軸支電気機械の実施例を示す図である。
図2は、機械とラジアル磁気軸受が磁気固定子ユニットに一体化された、従来の磁気軸支電気機械の実施例を示す図である。
図3は、軸方向および傾斜方向の受動的な安定化の可能性を示す図である。
図4は、本発明に基づく磁気軸支電気駆動装置の固定子の実施例を示す図である。
図5は、外側回転子に対して巻線を技術的に変更した、本発明に基づく電気駆動装置の一実施例を示す図である。
図6は、複数の分散型コイルを有する電気駆動装置の一実施例を示す図である。
図7は、電気駆動装置の励起のために用い得るブリッジ回路の一実施例を示す図である。
図8は、筋の入った同心円状の巻線および突極磁極と補助磁極を有する、本発明に基づく磁気軸支駆動装置の一実施例を示す図である。
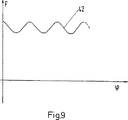
図9は、非正弦波固定子電流層分布および空隙中での非正弦波励起場分布における角度に依存する力の変動を示す図である。
図10は、巻線磁極領域において、非対称シートメタルカットを有する、本発明に基づく駆動装置の一実施例を示す図である。
図11は、交流場でのモータ動作において、その始動を確実に行うための補助磁石を有する、本発明に基づく駆動装置の一実施例を示す図である。
図12は、固定子磁極において回転子の回転による下方揺れの制御性を示す図である。
図13は、固定子磁極の片側に取り付けた短絡用リングを有する、本発明に基づく駆動装置の一実施例を示す図である。
図14は、空隙中において、正弦波励起場分布を実現するために、特別な形状に仕上げた磁石セグメントを有する、本発明に基づく駆動装置の一実施例を示す図である。
図15は、機械およびラジアル軸受の両者において、回転磁場を生成することができる、本発明に基づく磁気軸支駆動装置の固定子の一実施例を示す図である。
本機械は、用途によって、モータまたは発電機として動作させることが可能である。図4は、高密度直径巻線および突極磁極を有する機械磁気軸受装置(固定子は、例えば、さらに冷却効果を高めるためにアルミニウムリングまたはアルミニウムシリンダに各々嵌合される)の一実施例を示す。ここで、高密度巻線とは、コイルが磁極部に分散されないと同時に(磁気的に有効な方法で)互いの位置がずれている巻線のことである。従って、コイル34及び35は、それぞれ高密度であると考えられる。突極磁極とは、高密度巻線に囲まれた強磁性体の磁極またはエアコイル磁極のことである。この分類に含まれるものは、例えば、高密度巻線に囲まれているリム磁極99、或いは高密度コイル36によって磁気的に閉塞される99及び100など単独のあるいは複数に分割された磁極等がある。この巻線はまた、ピッチに端数が生じても良い。つまり、磁極部より巻線幅が小さくても、また大きくても良い。図8に、この場合の一実施例を示す。ピッチにかなりの端数が生じる場合、磁極幅を強磁性補助磁極86で狭めることによって生じる磁極ギャップを閉じる方向の状態に置かれる。二つの巻線系、つまり単ループ4磁極機械巻線及び2ループ磁気軸受巻線によって、図4及び図8における構成において、駆動力或いは軸支力を発生させる機能が実現できる。
機械ループは、コイル30,31,32、及び33で形成され、第1の磁気軸受ループは、コイル34及び35で構成され、また第2の磁気軸受ループはコイル36及び37で形成される。機械ループの高密度コイルによって、強磁性材料による突極磁極(ここではリム磁極)が形成される。要求されに内容に基づき、これらは互いに直列に或いは並列に接続され、また、交流電流による励起の際、例えば、4磁極永久磁石回転子に駆動力を発生させるのに充分な4磁極の回転磁場を生じせしめる。第1及び第2の磁気軸受ループは、互いに角度が90°となるように配置される。2磁極の回転磁場は、半径方向軸支力の振幅及び位相を設定するための磁気軸受ループの、対応する電流励起を介して形成される。図4の機械または磁気軸受ループのコイルは、直列或いは並列に接続される。磁気軸受コイル34及び35および/または36及び37は、各場合に応じて、適宜、単一コイルに組み合わされ、高密度巻線を形成する。
図5は、同様に、単一ループの四磁極機械巻線67,68,69,70、および二ループの第1ループ71,72及び第2ループ73,74を有する二極磁気軸受巻線を有する外側回転子駆動装置用巻線の技術的な変形例を示し、これは、後者に対して垂直に配置される。磁気軸受巻線の2つのループは、45°回転することも可能であり、また図4の結果に類似した構造となるように機械巻線の溝に設けられる。さらにコイル71,72、及び73,74は、場合によっては、1つのコイルを形成するように組み合わせることができる。機械ループに関しては、例えば68及び70のように、互いに反対側に布設された二つのコイルが無くても良い。図5に示す構造の外側回転子は、四磁極のリング或いは鐘状とするのが良い。
図4及び図5の構造に対するもう一つの選択肢として、機械巻線或いは磁気軸受巻線を、複数(図では2つ)の分散型コイル75,76(図6)で形成することもできる。このように、図6においては、第1のループ接続77及び第2のループ接続78、或いは、各々、反対の巻線方向で隣接する巻線磁極とさらに次に接続される状態を示す。
個別のループ電流は、例えば回転子位置および回転速度に対する所望の指定値及び実際の値、すなわち、アナログ回路或いは高速コンピュータユニットによって、回転子の位置及び回転子の回転角用検出器信号を評価した後、回転子の回転角或いは駆動力を考慮することにより決定される。決定された信号は、電力電子回路によって増幅され、クロックで同期を取ったスイッチ或いはアナログ電力増幅器を介して3つのループに供給される。これに応用可能なブリッジ回路を図7に示す。機械ループは24によって示され、2つの磁気軸受ループは25及び26によって示す。制御経路の特徴を考慮して、電流を印加する代わりに電圧を印加することも可能である。
特に交流磁場の代わりに回転磁場を介して機械の操作を実施する場合は、この機械の回転子の種類は、自由に選択することが可能である。例えば、永久磁石回転子、短絡ケージ回転子、短絡ケージの代わりに高導電性の金属被覆を有するさ回転子、或いは角度依存性の空隙変動を有するリラクタンス回転子を用いることが可能である。
各々、ピッチに生じる端数が十分でない場合或いは分布が不充分な巻線の場合、また非正弦波励起磁場分布の場合、例として図9に示すように、角度依存性のある半径方向の力の変動42は、回転子が回転した際の定電流振幅を示す図4,5或いは8に基づき、半径方向の軸受巻線ループの電流励磁における空隙磁場の高調波成分によって生じる。この効果は、良好な動作状況を達成するために巻線の電流励磁の際に考慮されるべきである。
正弦波が充分維持された励磁場分布は、例えば、図14に基づき、回転子と固定子84間の角度依存性の空隙を有する形状82によって、永久磁石回転子85を用いることによって達成できる。永久磁石の直径方向の磁化もまた、正弦波磁場分布に関しては好ましい方向に作用する。回転子の強磁性後部端子或いはヨークは、83によって示される。しかしながら、コストの観点から、高密度巻線及び半径方向すなわち直径方向に磁化した、特別な形状を必要としない磁石を用いることも有利な方法である。
図4或いは図5に各々示す磁気軸支機械においては、機械の操作には交流磁場しか利用できないため、適宜、始動時点での不感帯を克服するために補助駆動力を備える必要がる。このことは、例えば、巻線磁極(図10)部の非対称形のシート状金属板カット38によって実行可能である。もう一つの提案された解決手段(図11)には、1つ或いはそれ以上の補助磁石43が備えられており、この補助磁石43は、回転子に対して軸方向または半径方向に配置されており、また、この補助磁石43によって、例えば、四磁極永久磁石回転子50は、磁石の引付け力の結果、角度φで好ましい始動位置44に移動する。磁石磁極の境界位置45において、始動駆動力は任意の大きい電流でゼロになる。巻線磁極は、46,47,48及び49によって示す。引付け力を補助するために、補助磁石に鉄ヨークを追加することが可能である。
磁気軸受部によって制御される固定子磁極65の空隙の終端において、回転子66が回転し下方に揺れる(図12)ことによって、磁石の磁極位置に変化を起こすことも可能である。直径が異なる結果、駆動力が増加できない不感帯外で回転子が回転できるように、下方への回転揺れ発生時、磁石と固定子磁極間の角度のずれが増大することになる。下方への回転揺れ発生時における回転子の中間点の動きを67で表す。下方への揺れの運動中、回転子と固定子間ですべりが発生しないように、回転子及び/或いは固定子の周辺に手段を講じる必要がある(例えば、摩擦係数が大きい材料を用いたり、表面を粗したり、歯形を設ける等)。
さらに提案された一解決手段を図13に示す。固定子磁極の片側に短絡リング52を設けることにより、短絡電流の結果として、交流磁場の代わりに、楕円形の強い回転磁場が空隙中に発生する。
図4,5,8及び10は、駆動力及び軸支力に関する磁極対の数に対する、また、2巻線からなるループの数の両方に対する実施例であると考えられる。磁極対の数を変更することもまた可能であるが、そのためには、機械動作のための磁極大数PMと、磁気軸受動作のための磁極対数PMLとの間にPM=PML±1という条件が成り立つことが必要である。ループ数及び電源電子回路におけるブリッジ分岐の数を増やすことにより、交流磁場機械の代わりに回転磁場機械を、本発明に基づき、磁気軸支駆動装置に一体化することも可能である。
これに対して可能と思われる実施例を図15に示す。固定子は、コイル87、89,91,93及び88,90,92,94から成る2つの4磁極駆動巻線を含み、これらのコイルは、直列或いは並列に接続される。駆動力を発生させるための電機子回転磁場を、駆動力ギャップを有しない4磁極回転子により形成することができるように、機械ループは、互いに電気的に90°ずらす。従って、この構成には、前述した例とは対照的に、始動の補助を必要としない。
直径コイル95及び97は、ラジアル磁気軸受の2ループを形成し、90°ずれている。ここで、回転磁場を発生させることが可能である。利用可能な巻線スペースをより有効に利用するために、さらに2つのコイル96及び98を導入することができ、例えば、コイル96はコイル95に接続することができ、またコイル98はコイル97に接続することができ、それぞれにおいて単ループを形成する。
もう一つの構造的な変形例として、磁極対の数による場合と同様に、2磁極回転子によって、二つ及び一つの固定子巻線を実現することも可能である。このために、単数或いは複数のループを有する機械巻線を選択し2磁極とすることになり、また複数のループを有する磁気軸受巻線を選択し4磁極とすることになる。
すでに説明した側面とは全く独立なものであるが、本発明のさらなる本質的な側面は、本発明に基づく電気駆動装置の磁気軸支機械の固定子或いは回転子に、駆動力及び軸支力生成用の分離式巻線を実装することができ、また、これにより単ループ内で機械ループを形成できるという認識に最終的には基づいている。
Claims (9)
- 磁気軸支電気機械と、前記磁気軸支機械に対して、制御、調整、監視および励起を行うためのアナログまたはデジタル電子回路とを備え、前記磁気軸支電気機械が永久磁石、短絡ケージまたは高伝導性金属被膜を有する回転子と、駆動力および軸支力を生成するために機械巻線および磁気軸受巻線が挿入される固定子とを含む、磁気軸支電気駆動装置であって、前記磁気軸支機械の固定子は、駆動力生成用の磁極対数PMを有する単一の位相巻線または複数の位相巻線(30,31,32,33)および軸支力生成用の磁極対数PML=PM±1を有する分離式単一の位相巻線または複数の位相巻線(34,35,36,37)を備え、前記巻線の少なくとも一つを、突極巻線磁極を有する高密度巻線として形成したことを特徴とする磁気軸支電気駆動装置。
- 前記軸支力生成用の磁気軸受巻線(34,35,36,37)が、回転磁場生成のために複数の位相巻線として形成されることを特徴とする請求項1に記載の電気駆動装置。
- 前記駆動力生成用の機械巻線(30,31,32,33)が、回転磁場生成のために複数の位相巻線として、または交流磁場生成のために単一の位相巻線として形成されることを特徴とする請求項1に記載の電気駆動装置。
- 前記高密度巻線は、全節巻線として形成されることを特徴とする請求項1に記載の電気駆動装置。
- 前記高密度巻線は、磁極部よりも小さいまたは大きいコイル間幅が生じるように部分的に配置されていることを特徴とする請求項1に記載の電気駆動装置。
- 前記磁気軸受巻線は、二つの位相巻線(34、35;36,37)として形成され、また前記モータ巻線は、一つの位相巻線(30、31、32、33)として形成され、さらに、前記磁気軸受巻線(34、35;36,37)の磁極対の数および前記モータ巻線(30、31、32、33)の数が、その順番に拘わらず、一つおよび二つになることを特徴とする請求項1乃至5のいずれか1項に記載の電気駆動装置。
- 単一位相機械巻線の場合、始動の信頼度を高めるための始動補助であって、特に、非対称の固定子金属シートカット(38)、一つ以上の補助磁石(43)、または一つ以上の短絡リング(52)からなる始動補助を備えることを特徴とし、または、前記回転子の好ましい始動位置は、前記回転子と対向する固定子面における前記回転子の回転による下方への揺れ(67)によって、前記磁気軸受巻線の対応する励起を介して設定されることを特徴とする請求項1乃至6のいずれか1項に記載の電気駆動装置。
- 前記回転子(40)および好ましくは固定子(39)の磁気的に有効な部分は、前記磁気空隙磁場の力による作用(41)の結果として、軸方向および回転軸に対する二つの傾斜方向に、前記回転子の安定した、動作に必要な受動的磁気軸支を生じるように、半径方向の寸法に対して軸方向の寸法が短い円板、リングまたは、鐘状に形成されていることを特徴とする請求項1乃至7のいずれか1項に記載の電気駆動装置。
- 全ての巻線、すなわち、前記機械巻線および前記磁気軸受巻線の両者が、高密度巻線として形成されていることを特徴とする請求項1乃至8のいずれか1項に記載の電気駆動装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19726352A DE19726352A1 (de) | 1997-06-21 | 1997-06-21 | Magnetgelagerter elektrischer Antrieb mit konzentrierten Wicklungen |
| DE19726352.6 | 1997-06-21 | ||
| PCT/CH1998/000268 WO1998059407A1 (de) | 1997-06-21 | 1998-06-19 | Magnetgelagerter elektrischer antrieb |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002505067A JP2002505067A (ja) | 2002-02-12 |
| JP4320409B2 true JP4320409B2 (ja) | 2009-08-26 |
Family
ID=7833214
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP50349299A Expired - Lifetime JP4320409B2 (ja) | 1997-06-21 | 1998-06-19 | 磁気軸支電気駆動装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6465923B2 (ja) |
| EP (1) | EP0990297B1 (ja) |
| JP (1) | JP4320409B2 (ja) |
| DE (2) | DE19726352A1 (ja) |
| WO (1) | WO1998059407A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10034662A1 (de) * | 2000-07-16 | 2002-01-24 | Wolfgang Amrhein | Aufwandsamer elektrischer Antrieb zur Erzeugung von Tragkräften und Drehmomenten |
| JP4750965B2 (ja) * | 2001-04-25 | 2011-08-17 | 養二 岡田 | 磁気浮上型電動機 |
| JP2003092863A (ja) * | 2001-09-20 | 2003-03-28 | Nissan Motor Co Ltd | 永久磁石埋込同期モータ |
| US6727618B1 (en) * | 2002-06-10 | 2004-04-27 | The United States Of America, As Represented By The Administrator Of National Aeronautics And Space Administration | Bearingless switched reluctance motor |
| US7250734B1 (en) * | 2003-05-27 | 2007-07-31 | Synchrony, Inc. | High performance switched reluctance machine |
| US20060152100A1 (en) * | 2005-01-07 | 2006-07-13 | Visteon Global Technologies, Inc. | Vehicle alternator having reduced windings |
| US20060275155A1 (en) * | 2005-01-28 | 2006-12-07 | Robert Thibodeau | Rotational apparatus |
| JP4440275B2 (ja) * | 2007-02-02 | 2010-03-24 | 三菱電機株式会社 | 三相回転電機 |
| US7832922B2 (en) | 2007-11-30 | 2010-11-16 | Levitronix Gmbh | Mixing apparatus and container for such |
| DE102009014308A1 (de) * | 2009-03-25 | 2010-09-30 | Gerhard Geiger Gmbh & Co. | Antriebsvorrichtung mit Motorbremse |
| US8008827B1 (en) * | 2010-02-18 | 2011-08-30 | Tesla Motors, Inc. | Triple layer winding pattern and methods of manufacturing same |
| AT512040B1 (de) | 2011-10-27 | 2013-05-15 | Linz Ct Of Mechatronics Gmbh | Elektrische maschine, insbesondere bürstenloser torquemotor |
| CN104362825A (zh) * | 2014-10-31 | 2015-02-18 | 国网安徽凤台县供电有限责任公司 | 绕线式无轴承异步电机及制造方法 |
| CN107044484B (zh) * | 2016-11-11 | 2019-04-23 | 浙江大学 | 一种径向两自由度混合磁悬浮轴承 |
| JP7285620B2 (ja) * | 2017-10-31 | 2023-06-02 | ダイキン工業株式会社 | 電動機およびターボ圧縮機 |
| FR3078585B1 (fr) * | 2018-03-01 | 2024-01-05 | Leroy Somer Moteurs | Rotor ou stator bobine et procede de fabrication |
| US12341405B2 (en) * | 2022-09-09 | 2025-06-24 | Wisconsin Alumni Research Foundation | Bearingless rotating electric machine with field weakening |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3572854A (en) * | 1968-01-05 | 1971-03-30 | Gordon T Danby | Electromagnetic suspension and positioning device with inherent dynamical stability in three dimensions |
| US5036235A (en) | 1990-07-25 | 1991-07-30 | Xerox Corporation | Brushless DC motor having a stable hydrodynamic bearing system |
| JP2670986B2 (ja) | 1995-02-09 | 1997-10-29 | 明 千葉 | 電磁回転機械 |
| WO1996035257A1 (fr) * | 1995-03-30 | 1996-11-07 | Nikkiso Company Limited | Machine rotative a reluctance commutee |
| US5818137A (en) | 1995-10-26 | 1998-10-06 | Satcon Technology, Inc. | Integrated magnetic levitation and rotation system |
-
1997
- 1997-06-21 DE DE19726352A patent/DE19726352A1/de not_active Withdrawn
-
1998
- 1998-06-19 JP JP50349299A patent/JP4320409B2/ja not_active Expired - Lifetime
- 1998-06-19 WO PCT/CH1998/000268 patent/WO1998059407A1/de active IP Right Grant
- 1998-06-19 EP EP98925374A patent/EP0990297B1/de not_active Expired - Lifetime
- 1998-06-19 DE DE59810632T patent/DE59810632D1/de not_active Expired - Lifetime
- 1998-06-19 US US09/446,221 patent/US6465923B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6465923B2 (en) | 2002-10-15 |
| JP2002505067A (ja) | 2002-02-12 |
| DE59810632D1 (de) | 2004-02-26 |
| US20020093263A1 (en) | 2002-07-18 |
| WO1998059407A1 (de) | 1998-12-30 |
| DE19726352A1 (de) | 1999-01-07 |
| EP0990297A1 (de) | 2000-04-05 |
| EP0990297B1 (de) | 2004-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4189037B2 (ja) | 磁気軸支電気駆動装置 | |
| JP4320409B2 (ja) | 磁気軸支電気駆動装置 | |
| JP5192629B2 (ja) | 経済的な非摩耗電気駆動装置 | |
| US6995494B2 (en) | Axial gap brushless DC motor | |
| US6177746B1 (en) | Low inductance electrical machine | |
| US5723928A (en) | Induction motor and method of adjusting power factor of the same | |
| JPS60500517A (ja) | 改良式ブラシレス直流モ−タ | |
| JP2002354767A (ja) | 磁気浮上電動機 | |
| JP2001078389A (ja) | 磁気浮上型電動機 | |
| WO2001029955A1 (en) | Low inductance electrical machine | |
| JP2001224154A (ja) | マルチポール磁気浮上回転方法およびその装置 | |
| US5059884A (en) | Variable reluctance motor providing holding torque | |
| JP2955221B2 (ja) | 回転アセンブリ | |
| JP3710547B2 (ja) | ディスク型磁気浮上回転機械 | |
| JPH1023690A (ja) | 電動機 | |
| JPH03103091A (ja) | 3相リラクタンス型電動機 | |
| JP3742697B2 (ja) | ホモポーラ型リラクタンスモータ | |
| JP2004088852A (ja) | 電動機およびそれを用いた圧縮機 | |
| JPH0921420A (ja) | 高速回転機械の磁気軸受装置 | |
| JPH048154A (ja) | 有鉄心形単相ブラシレスモータ | |
| JPH09312958A (ja) | モータ | |
| JP7359738B2 (ja) | シングルアキシャルギャップ型回転機 | |
| Sugimoto et al. | Design consideration for performance improvement in one-axis actively positioned single-drive bearingless motor | |
| JP2009065746A (ja) | キャンドモータ駆動システム | |
| JP2000050605A (ja) | 軸方向空隙型ブラシレスファンモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071127 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080226 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080909 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090428 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090511 |
|
| A72 | Notification of change in name of applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A721 Effective date: 20090511 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120612 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130612 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |