JP4270748B2 - 多数プロセッサの冗長性を備える血管造影用注射器装置 - Google Patents
多数プロセッサの冗長性を備える血管造影用注射器装置 Download PDFInfo
- Publication number
- JP4270748B2 JP4270748B2 JP2000520179A JP2000520179A JP4270748B2 JP 4270748 B2 JP4270748 B2 JP 4270748B2 JP 2000520179 A JP2000520179 A JP 2000520179A JP 2000520179 A JP2000520179 A JP 2000520179A JP 4270748 B2 JP4270748 B2 JP 4270748B2
- Authority
- JP
- Japan
- Prior art keywords
- injection
- injection device
- patient
- processor
- syringe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/50—Clinical applications
- A61B6/504—Clinical applications involving diagnosis of blood vessels, e.g. by angiography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/481—Diagnostic techniques involving the use of contrast agents
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14212—Pumping with an aspiration and an expulsion action
- A61M5/14216—Reciprocating piston type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M5/1452—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons
- A61M5/14546—Front-loading type injectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16804—Flow controllers
- A61M5/16827—Flow controllers controlling delivery of multiple fluids, e.g. sequencing, mixing or via separate flow-paths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/172—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/548—Remote control of the apparatus or devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3546—Range
- A61M2205/3561—Range local, e.g. within room or hospital
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/01—Remote controllers for specific apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/04—Heartbeat characteristics, e.g. ECG, blood pressure modulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/001—Apparatus specially adapted for cleaning or sterilising syringes or needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/172—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic
- A61M5/1723—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body electrical or electronic using feedback of body parameters, e.g. blood-sugar, pressure
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S128/00—Surgery
- Y10S128/01—Motorized syringe
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S128/00—Surgery
- Y10S128/12—Pressure infusion
Description
【関連出願の相互参照】
本出願は、その双方を参考として引用し、本明細書に含めた、1995年4月20日付け出願の米国特許出願第08/426,148号の包封継続出願である、1997年10月7日付け出願の米国特許出願第08/946,293号の一部継続出願である。本出願は、また、1997年10月24日付け出願の出願第08/957,228号「二重ポート注射器(DUAL PORT SYRINGE)」、1997年11月6日付け出願の出願第08/965,583号「空圧制御装置及び方法(PNEUMATIC CONTROLLER AND METHOD)」という米国特許出願、1997年11月6日付け出願の意匠出願第29/079,623号「手持ち型の空圧制御装置(HAND−HELD PNEUMATIC CONTROL DEVICE)」の内容を参考として引用し本明細書に含めるものである。これら3つの出願は、全て、当該出願と同一の譲受人が所有するものである。
【0002】
【発明の分野】
本発明は、全体として、血管形成法、及び/又は特に、造影用コントラスト物質流体のような医療流体を生体器官内に注射する改良された注射器装置に関する。
【0003】
【発明の背景】
血管形成法は、血液が人間又は動物の身体内を流れるときに通る通路の回路網に向けて血管の異常又は狭窄症を含む、心臓血管の状態を治療するときに使用される方法である。血管形成法を行う間、放射線造影コントラスト物質はカテーテルを通じて静脈又は動脈内に注射し、次に、そのコントラスト物質は、静脈又は動脈と流体的に連通した血管構造体まで流れる。コントラスト物質が注射される身体領域をX線が通るとき、これらのX線は、コントラスト物質により吸収され、所望の血管構造体の放射線造影像を提供する。この像をフィルム又はビデオテープに記録し且つ/又は蛍光モニター上に表示する。これらの像は、例えば、診断やバルーンを血管系内に挿入し且つ狭窄部分を開放し得るように膨張させる、血管形成法のような外科的方法のような多くの目的のために使用することができる。
【0004】
コントラスト物質は、手動又は自動式の注射装置によりカテーテル内に注射することができる。コントラスト物質を注射する装置は、色々なものとすることができるが、最新の装置は、カテーテルと作用可能に接続された注射器を含む。該注射器は、コントラスト物質を保持するチャンバと、該チャンバ内にて往復運動可能に可動であるプランジャとを有している。部分的負圧を形成し得るようにプランジャがチャンバ内にて移動したとき、コントラスト物質はチャンバ内に吸引される。プランジャの方向を逆にすれば、最初に、空気がチャンバから押し出され、次に、プランジャの速度及び動きにより決定された速度及び量にてコントラスト物質がカテーテルに供給される。
【0005】
手動装置において、ユーザ又は操作者は注射器に装填し且つ注射器をカテーテルに接続する前に、チャンバから空気を追い出す。手動装置のユーザは、プランジャに加えられる手の力を変化させることにより、注射速度及び量を調節する。手動装置に対する最高の注射圧力は、通常、150p.s.i.(すなわち、人間の手で加えることのできる最大圧力)に制限され、流体の最大量は約12ccである。かかる手動装置は、通常、所定の注射パラメータ(速度及び圧力のような)外となる注射を制限し又は防止するための安全機能部分を何ら備えず、また、全体として、気泡又はその他の危険物を検知するための作用可能なセンサ又は警報装置を備えていない。
【0006】
血管造影法は、コントラスト物質以外の流体を注射することを含むことがある。例えば、塩水をフラッシングし及び/又は流体薬剤を注射することが望まれることがある。最も一般的に使用される手動の注射装置の1つは、注射器又はカテーテルに接続された流体通路内に又は流体通路外に所望の流体の流れを向け得るように操作者が選択的に開放し且つ閉じる、手動操作式の複数の弁を有する弁機構を含む。操作者がコントラスト物質流体を注射器チャンバ内に吸引し又は注射器チャンバから注射するとき、流体は、弁の相対的な位置により決定される最小抵抗の経路を通って流れる。弁の位置を変化させることで、1種以上の流体を選択的に注射することができる。
【0007】
手動注射装置に関係した難点及び危険性を解決するため多数のモータ駆動且つ自動式注射装置が当該技術分野にて開発されている。かかる自動式装置の殆どは、その動きが電子的に制御されるモータにより調節されるリニアモータと共に注射器を使用する。かかる典型的な装置の説明のため、1989年3月14日に発行された米国特許第4,812,724号、及び1989年8月8日に発行された、米国特許第4,854,324号を参照できる。かかる自動式注射装置は、全体として、装置内に供給すべきコントラスト物質の所望の一定量及び所望の一定の注射速度を表すパラメータを操作者が入力する、一定速度の注射装置である。かかる装置は、通常、コントラスト物質の全量が注射される迄、最終的な注射速度となる最初の特定の流量の増加分を含めている。注射を開始し又は停止させる場合を除いて、操作者と装置との間に、何ら相互作用的な制御は為されない。流量を少しでも変更しようとするためには、注射装置を停止させ且つパラメータを再設定しなければならない。しかしながら、かかる機械の自動式の性質は、初期の手動注射装置では利用できなかった、注射速度及び量の制御機能を追加することを可能にする。
【0008】
最適な流量は患者毎に著しく相違する可能性があるため、かかる従来技術の装置では、注射過程中、注射量を変更し得ないことは、血管造影法による検査の質が最適なものより劣る可能性がある。心臓血管系において、コントラスト物質の注射速度及び量は、注射する血管内又はその他の心臓血管室内の量及び流量によって決まる。多くの場合又は殆どの場合、これらのパラメータは、正確に把握されておらず、患者の心臓血管系の状態は、例えば、薬剤、病気又は正常な生理学的作用のような、条件に応答して変化するため、注射過程中に急速に変化する可能性がある。その結果、コントラスト物質を注射するための最初に選択した量又は流量のパラメータは、X線像にて所望の構造体の輪郭を描くのに不十分であり、これにより、もう1回注射することが必要となる。これと逆に、流量が過剰であると、注射する心臓血管系の血管を傷付け、カテーテルを患者に対して変位させたり又はコントラスト物質の過剰な注射により有害な効果(異常な心臓の律動のような)を生じる可能性がある。参考としてその全体を引用し、本明細書に含めた我々の従来技術の相互関連出願は、従来技術では、注射過程中、注射パラメータを変化させ得ないことを課題としている。
【0009】
従来の自動式装置は、血管造影用注射方法の正確さ及び信頼性を著しく向上させているが、公知の装置は、望ましい程に使い易いものではなく、治療すべき患者の生理学的条件又はその他の値に特有の注射不能なパラメータを自動的に決定する能力を備えず、また、その装置の設計に順向型の安全機能を備えていない。
【0010】
全ての自動式装置は、必然的に、装置が患者にある状態にて、注射過程を開始する前に、ある種の較正及び始動手順を行うことを必要とする。従来、かかる自動式装置は、特に使い易いものではなく、装置を使用する操作者又は担当技師がユーザマニュアルに記載された指図に従って設定及び初期化方法に従うことを要求していた。かかるマニュアルの注意及び取り扱いに関連する煩わしい事項に加えて、1つの注射のマニュアルを別の注射のマニュアルと間違ったり、又は最新の初期化方法及び/又はパラメータを含まない旧式のマニュアルを使用する可能性がある。従来の自動式装置の更なる短所は、かかる装置は、注射過程の任意の時点に存在する実際のリアルタイムの注射パラメータ、又は注射過程の開始時から現在まで患者に投与されたコントラスト物質の合計量を記録し且つ操作者に表示しないことである。従来、注射方法に関するかかる累積的な情報を収集し且つ記録することは、操作者の仕事であった。
【0011】
公知の自動式注射装置は、通常、注射すべきコントラスト物質の量、注射の流量、許容される最高注射圧力及び注射流量の変化速度(すなわち、立上り時間)という、注射パラメータの1つを入力することを必要とする流れ、量及び持続時間という3つのパラメータが関係しているため、その何れか2つが把握できれば、第3のものは計算することができる。公知の装置は、操作者が注射方法のための所望のパラメータを決定するか、又は操作者がそれ以前の過程にて装置の記憶装置内に記憶させたパラメータを操作者が呼び出すことを必要とする。かかる注射装置は、操作者が使用することのできる異なる種類の注射方法に関連するパラメータに対して記憶させた注射不能な設定値をも含んでいる。しかしながら、かかる従来技術の装置の欠点は、かかる注射不能及び記憶したパラメータの値は、任意に決定されたものであり、全体として、治療を受ける患者の独特の性質又は値或いは特徴を使用して決定されない点である。
【0012】
公知の自動式注射装置は、また、その装置の設計に順向型の安全機能も備えていない。注射器プランジャの動きを主として自動的に制御するため、従来の装置には、マイクロプロセッサが使用されているが、マイクロプロセッサの有効性をチェックするための補助的な安全装置は、順向型安全機能の性質のものではなく、安全装置か所定の注射パラメータの1つ以上から外れた状態で注射過程が行われていると決定したとき、注射を中断し又は停止する能力のみを備える型式のものである。本発明は、公知の自動式血管造影用注射装置の上記及びその他の難点を解決しようとするものである。
【0013】
【発明の概要】
本発明は、極めて可撓性で且つ使い易く、しかも、操作者に対しリアルタイムの瞬間的な注射パラメータを提供する自動式の血管造影用注射装置を提供するものである。この装置は、較正及び始動過程の間、追加的マニュアル又はハードコピーによる指図を要求することなく、その較正の手順及び始動の命令事項を操作者に表示する液晶ディスプレイスクリーンを特徴としている。ユーザと装置のマイクロプロセッサとの連絡は、視覚的ディスプレイにおけるタッチ応答型パッドを通じて容易に且つ正確に可能となる。装置のマイクロプロセッサは、常に、最新の情報を含んでいるため、旧式のマニュアルを使用する結果として、操作者が間違いをする可能性は全くない。注射過程の進行に伴い、装置のマイクロプロセッサは、瞬間的に操作者と連絡し、操作者に対し、注射パラメータの瞬間的な値及び患者に注射されたコントラスト物質の合計量を含むリアルタイムの情報を提供する。かかる情報は、防止しなければ長時間の診断又は治療手順の間連続的に注射する結果として生ずる可能性のある有害な量のコントラスト物質の注射を防止することになる。
【0014】
本発明は、注射過程の各々を開始する前に、注射不能な好ましい注射パラメータ値を計算する注射パラメータの決定方法を更に採用する。これらの注射不能な好ましい注射パラメータ値は、治療を受ける患者に特有の体重、年令、健康状態、心臓血管の特異性等のような生理学的値又は情報を使用するアルゴリズムを用いて計算する。かかる決定方法は、患者への最後の注射過程後に、患者に生じたであろう変化のファクタを決定することを可能にし、また、患者に関する以前に記憶装置に記憶された古い情報にのみ頼らない。本発明の一つの形態によれば、かかるアルゴリズムによって決定したパラメータは、コントラスト物質を患者に対し最適に供給するため自動式の一定速度又は操作者が開始した可変速度の注射作動モードの何れかにて採用される。
【0015】
本発明は、装置のセンサ及び臨界的な安全注射方法のための二重の冗長型安全機能部を同時に作動させるため、マイクロプロセッサのような能動的な情報装置を複数、内蔵する装置を更に対象としている。かかる装置は、1つのマイクロプロセッサにより誤信号が発生された場合、単に作動を停止することを必要とするものではない、能動的な冗長型の決定機能を可能にする。本発明の一つの形態によれば、多数の冗長型情報制御装置を提供するため、操作者のインターフェース機能を直ちに提供するパーソナルコンピュータ(PC)利用の作動装置と共に、検知及び機器の制御を行い得る特別な形態とされた、組み込みコア作動装置を同時に使用する注射装置が提供される。
【0016】
本発明の更なる形態によれば、商業的に利用可能なサーボ増幅器及び独特な入れ子にされた制御ループを使用することにより、コントラスト物質を注射する注射器プランジャの原動機を正確に且つ効率的に制御することが可能となる。
【0017】
本発明の一つの形態によれば、医療流体を血管造影用注射装置から患者に制御可能に供給する方法であって、(a)医療流体を患者の体内に注射する流体供給機構を有する血管造影用の注射装置を提供することと、(b)上記の流体供給機構と作用可能に接続された少なくとも2つのコンピュータにより流体供給機構からの医療流体の注射を制御することとを備える方法が提供される。本発明の一つの好ましい形態によれば、コンピュータの1つは、PC型であることが好ましく、もう一方は、組み込みコア型であることが好ましい。少なくとも2つのコンピュータによる注射過程のかかる制御は、別個の1つのコンピュータによって、供給機構の重要な作用機能を独立的に二重の冗長制御することを可能にする。
【0018】
本発明の更なる形態によれば、血管造影用注射装置であって(a)医療流体を患者の体内に注射する装置と、(b)装置が医療流体を注射し得るように該装置に作用可能に接続された駆動手段と、(c)駆動手段を作用可能に制御し得るように該駆動手段と作用可能に接続された複数のコンピュータとを備える血管造影用注射装置が提供される。本発明の更に別の特徴によれば、該コンピュータは、医療流体の流量及び容積のようなパラメータを含む、装置の重要な注射パラメータを制御し得るようにコンピュータは駆動手段を能動的に制御する。本発明の一つの好ましい形態によれば、この注射装置は、可動のピストンを有する注射器を備え、駆動手段は、ピストンを移動させるように作用可能に接続されたモータを備えている。かかる形態において、コンピュータは、装置に対して二重の冗長型安全制御回路を提供し得るようにモータ速度及びモータの電流のようなモータの作用可能なパラメータを能動的に監視する。
【0019】
本発明の更に別の形態によれば、医療流体を患者の体内に排出する注射器装置と、注射器装置が上記流体を制御可能に排出し得るように注射器装置に作用可能に接続された注射器の制御回路網とを有する型式の血管造影用注射装置と組み合わせて使用される制御装置であって、注射器装置及び注射器制御回路網の作用を監視し、注射器の制御回路網に対し制御信号を独立的に提供し得るように注射器制御回路網に作用可能に接続された独立的な情報処理機能を有する型式の少なくとも2つのコンピュータを備える制御装置が提供される。
【0020】
本発明の更に別の形態によれば、医療流体を患者の体内に注射する方法であって、(a)血管造影用注射機械を提供するステップと、(b)注射する前に、少なくとも1つの患者の値を機械に入力するステップと、(c)上記入力した患者の値に応答して機械内で少なくとも1つの注射パラメータを計算するステップと、(d)注射する前に、計算した注射パラメータを機械のユーザに表示するステップとを備える方法が提供される。本発明は、注射を行うとき機械が使用可能である、注射不能パラメータとしての値として計算した注射パラメータを機械に入力するステップと、その入力した注射パラメータを使用して、機械により実際に注射を行うステップとを更に含んでいる。好ましいアルゴリズム決定によれば、計算した注射パラメータを決定するときに使用した患者の値は、患者の体重であり、決定した注射パラメータは、医療流体の注射流量、医療流体の容積、注射流量の立上り時間及び注射過程中の医療流体の圧力限界値を含むことができる。
【0021】
本発明の更に別の形態によれば、(a)医療流体を患者に注射する装置と、(b)装置が少なくとも1つの注射パラメータに応答して、医療流体を制御可能に注射し得るように装置と作用可能に接続された制御手段と、(c)患者の生理学的値に対応する入力信号を受け取り且つその入力信号に応答して患者の値信号を提供するのに適した入力手段と、(d)患者の値信号を受け取り且つ該信号に応答して患者の関係する注射パラメータを決定し得るように作用可能に接続された計算手段と、(e)注射装置の外部にて患者に関係する注射パラメータを表示すべく計算手段と作用可能に接続された表示手段と、を備える血管造影用注射装置が提供される。かかる注射装置は、患者に関係する注射パラメータを制御手段に供給すべく計算手段及び制御手段と作用可能に接続された手段を更に備えることを意図しており、この手段においては、制御手段は少なくとも部分的に患者に関係する注射パラメータに応答して装置を制御する。
【0022】
本発明の更に別の形態によれば、(a)医療流体を患者に注射する装置と、(b)装置が医療流体を注射し得るように装置と作用可能に接続された駆動手段と、(c)装置が医療流体を制御可能に注射し得るように駆動手段を作用可能に制御する駆動手段と作用可能に接続された少なくとも1つのコンピュータと、(d)ユーザが入力信号を受け取り且つユーザに対して情報を表示するためコンピュータに作用可能に接続されたユーザインターフェースディスプレイと、(e)ユーザインターフェースディスプレイをコンピュータに作用可能に接続し、コンピュータに対し入力信号を提供し且つコンピュータからディスプレイに情報を提供する手段とを備える血管造影用注射装置が提供される。本発明の更に別の形態によれば、ユーザインターフェースディスプレイは、液晶型であることが好ましい視覚的なディスプレイスクリーンに重なり合うタッチパッドを更に備えている。本発明の一つの形態によれば、コンピュータは、ユーザに対して相互作用可能な設定スクリーンの順序を表示し得る形態とした仕方にてユーザインターフェースディスプレイに情報を提供する。該コンピュータは、また、注射中の合計注射量又は瞬間的な注射流量のような装置の注射手順に関係したリアルタイムの出力パラメータを表示するデータをも提供する。本発明の更に別の形態によれば、ユーザインターフェースディスプレイは、左冠状動脈、右冠状動脈又は左心室及び人間の解剖学的部分の大動脈部分の検査のような異なる注射手順を選択し得るようにユーザが作動可能な選択的な入力レセプタを含んでいる。この選択可能な入力レセプタは、また、異なる注射パラメータを選択し又は一定量又は可変量の注射作動モードの何れかの作動を選択するために使用することができる。本発明の更に別の形態によれば、該駆動手段は、装置を制御するサーボ増幅器装置を有するモータと、該モータを正確に作用可能に制御する入れ子式制御ループ回路とを含むことができる。
【0023】
【好ましい実施の形態の詳細な説明】
本明細書のより詳細な説明を参照することにより理解し得るように、本発明の原理は、自動式血管造影用注射装置の多くの異なる物理的な形態に適用可能である。参考として引用しその内容を本明細書に完全に含めた、上述の米国特許出願第08/426,149号により詳細に記載されているように、かかる装置の一例について全体として以下に説明する。特定の血管造影用装置について本発明の好ましい実施の形態に関して説明するが、本発明の原理は、記載した好ましい実施の形態にて使用することにのみ限定されるものではないことが理解されよう。図面を参照すると、図1には、相互作用可能な外科医の制御の下、放射線造影用コントラスト物質を血管内に注射する血管造影用注射装置10が図示されている。装置10は、主コンソール12と、携帯型の遠隔制御装置14と、注射器ホルダ16と、注射器本体18と、注射器プランジャ20と、放射線造影物質リザーバ(瓶)22と、一方向弁24と、マニホルド26と、高圧チューブ28と、カテーテル30と、患者への薬剤投与ポート32と、三方向停止コック34と、T字形コネクタ36と、圧力変換器38と、停止コック40と、チューブ42と、蠕動ポンプ44と、塩水逆止弁46と、廃物逆止弁48と、塩水バッグ50と、廃物バッグ52と、バッグ支持ラック54とを備えている。
【0024】
コンソール12は、ピストン20及び蠕動ポンプ44を駆動するモータと共に、装置10の電気的制御装置を収容している。コンソール12の前面には、ユーザインターフェース54が制御スイッチ56及びディスプレイ58を提供し、ユーザは、これらスイッチ及びディスプレイを通じて設定値を入力し且つ装置10の作動状態を監視することができる。
【0025】
主電源から電気的な安全絶縁を提供する適当な電力供給源によって、装置の全ての電気的構成部品に電力が供給される。電力供給源は、コンソール12内に配置することができるけれども、同コンソールから分離して壁上か又は取り付けカート上のどちらかに取り付けるのが好ましい。
【0026】
遠隔制御装置14は、ケーブル60によりコンソール12に接続されている(但し、その他の実施の形態では、遠隔制御装置14は、RF、赤外線光学素子又は超音波リンクのような無線接続部により接続することができる)。図1に図示した実施の形態においては、遠隔制御装置14は、持ち運び型制御装置である。該制御装置は、それぞれリセット押釦スイッチ62と、塩水押釦スイッチ64と、流量制御レバーすなわち引金部66とを有している。引金部66を握ることによりユーザは連続的に可変の注射量を提供し得るようにコンソール12に命令信号を提供することができる。
【0027】
注射器ホルダ16はコンソール12の左側部から突き出している。注射器ホルダ16は透明材料であることが好ましく、また、半円筒状の後部殻体68と、半円筒形の正面扉70(図1に開放位置にて図示)と、リザーバホルダ72とを備えている。
【0028】
注射器18は、その開口端部74がコンソール12に接続された透明又は半透明のプラスチック製シリンダである。注射器18の閉塞端部76は、上方ポート78及び下方ポート80という2つのポートを有している。
【0029】
プランジャ20は、注射器本体18内で可動である。プランジャ20は、コンソール12内に配置されたモータに接続され且つ該モータにより駆動される。
X線造影コントラスト物質リザーバ22は、一方向逆止弁24を通じて上方ポート78に接続されている。X線造影コントラスト物質は、逆止弁24及び上方ポート78を通じてリザーバ22から注射器本体18及びプランジャ20により画成された圧送チャンバ内に吸引される。逆止弁24は、空気が注射器本体18からリザーバ22内に流動するのを許容するが、X線造影コントラスト物質が注射器本体18からリザーバ22内に流動するのは許容しない重りの付いた一方向弁であることが好ましい。このことは、以下により詳細に説明するように、空気を装置から自動的に排出することを可能にする。
【0030】
注射器本体18の下方ポート80は、マニホルド26に接続されている。マニホルド26は、通常、変換器/塩水ポート82及び患者のポート84を接続するばね偏倚式のスプール弁を有している。X線造影コントラスト物質を注射すべきとき、そのX線造影材料の圧力によって、スプール弁は状態を変化させ、下方ポート80が患者のポート84に接続されるようにする。
【0031】
高圧チューブ28は、患者のポート84をカテーテル30に接続する可撓性のチューブである。三方向ストップコック34は、チューブ28の末端に配置されている。回転可能なルアロックコネクタ86がストップコック34に接続され且つカテーテル30の基端にてルアコネクタ88と嵌合している。ストップコック34は、チューブ28とカテーテル30との間の流れを遮断するか、流れを許容するか、又は薬剤ポート32をカテーテル30に接続する。
【0032】
カテーテル30を通じてX線造影材料を患者の体内に注射することに加えて、装置10は、また、その他の関係する機能を実施することも許容する。患者の薬剤を投与する装置(図1に図示せず)は、カテーテル30を通じて患者に薬剤を投与すべきとき、薬剤ポート32に接続することができる。
【0033】
カテーテル30が患者の体内の所定の位置にあり、X線造影コントラスト物質の注射が行われないとき、圧力変換器38は、カテーテル30から延びているカラン、チューブ28、患者のポート84、マニホルド26、変換器/塩水ポート82、チューブ90、T字形コネクタ36及びチューブ92内の血圧を監視する。変換器38は、これに関連するストップコック40を備えており、このストップコックは、較正中、変換器38を周囲の圧力にさらすことを許容し、また、変換器38のドームチャンバを塩水で洗い流すことができるようにするため混入した空気を除去し且つ追い出すことも可能にする。
【0034】
蠕動ポンプ44は、塩水溶液を、バッグ50から塩水逆止弁46、チューブ42、T字形コネクタ36及びチューブ90を通じて塩水ポート82まで供給する。蠕動ポンプ44が作動して、塩水溶液を供給するとき、塩水溶液は、マニホルド26を通じて患者のポート84に、次に、チューブ28を通じてカテーテル30に供給される。
【0035】
蠕動ポンプ44は、また、反対方向に作用して、流体をカテーテル30から、チューブ28、マニホルド26、チューブ90、T字形コネクタ36及びチューブ42を通じて、廃物逆止弁48まで吸引し且つ次に、廃物集めバッグ52内に入れる。
【0036】
本発明の1つの好適な実施の形態において、注射器本体18、マニホルド26、チューブ28、カテーテル30、T字形コネクタ36、チューブ42、逆止弁46、48、バッグ50、52、及びチューブ90、92は、全て使い捨て製品である。これらは、新たな患者に対して血管造影法を行う度毎に、装置10内に取り付けなければならない。ひとたび、装置10が全ての使い捨て製品が取り付けられた状態で準備されたならば、扉70を閉じて、注射器本体18にコントラスト物質を充填し、空気を除去し、ユーザ(通常は、医師)は、X線造影材料の注射に適用される安全パラメータを装置10に入力する。これらの安全パラメータは、通常、1回の注射にて注射すべきX線造影コントラスト物質の最大量、最大注射流量、注射器本体18内で発生される最大圧力、最大立ち上がり時間すなわち注射加速度を含む。コントラスト物質の注射を行うためには、ユーザは、引金部66を握ることにより遠隔制御装置14を操作する。予め設定した安全パラメータの範囲内において、装置10は、引金部66の力、すなわち移動距離が増すに伴って注射量を増加させる。
【0037】
通常、ユーザは、透視検査法又はその他の画像方法を使用して注射する構造体内へのコントラスト物質の排出量を連続的に監視することに基づいて注射されるコントラスト物質の量及び速度を計測する。装置10は、ユーザが患者の必要に応じて、コントラスト物質の注射を特別に設定し、これにより、その処置法の質を最高なものとし、安全性を向上させ、また、透視検査法を行うのに必要なコントラスト物質の量を少なくすることができる。
【0038】
図2A乃至図2Gは、装置10の7回の異なる作動中における流体流路を示す線図である。これらの過程は、コントラスト物質の充填(図2A)、空気の除去(図2B)、患者への注射(図2C)、患者への圧力(図2D)、塩水のフラッシング(図2E)、廃物の吸引(図2F)及び患者への薬剤の投与(図2G)である。
【0039】
図2Aに図示したコントラスト物質の充填過程は、リザーバ(対照媒体の供給源)22からのX線造影コントラスト物質を注射器本体18に充填することを含む。コントラスト物質の充填過程は、装置10の最初の準備の間に行われ、また、注射器本体18が放射線コントラスト物質が少ない状態で進むとき、常に、装置10が作動する間に、繰り返すことができる。
【0040】
装置10の最初の準備の間、プランジャ20は、最初に、注射器本体18の閉塞端76に隣接するその最も進んだ位置まで駆動される。このことは、注射器本体18内に存在する大部分の空気を大気中に追い出すことになる。
【0041】
次に、プランジャ20を引込め、これにより、注射器本体18内に負圧が発生し、この負圧は、コントラスト物質をリザーバ22から逆止弁24を通じて吸引し、上方ポート78を通じて注射器本体18に入れる。
【0042】
コントラスト物質の充填過程の結果、通常、多少の空気が注射器本体18内に吸引され又は注射器本体18内に残ることになる。勿論、空気がカテーテル30を通じて患者の体内に注射されるのを防止することが重要である。このことは、図2Bに図示した空気除去過程の目的である。また、異なる高さに2つのポートが位置することは、注射中の気泡を防止する点にて一層の安全性をもたらす。
【0043】
空気除去過程中、プランジャ20は、注射器本体18内に取り込んだ空気を追い出し得るように前方に進む。空気は、コントラスト物質よりも軽量であるために、注射器本体18の頂部付近に集まる。プランジャ20が前進すると、空気は、上方ポート78及び一方向弁24を通じて注射器本体18から追い出される。図2Bに図示した実施の形態において、一方向弁24は、X線造影コントラスト物質がリザーバ22から上方ポート78まで流れるのは許容するが、X線造影コントラスト物質が上方ポート78からリザーバ22まで反対方向に流れるのは許容しない、重量のある一方向弁である。しかしながら、弁24は、空気がポート78からリザーバ22まで流れるのを許容する。X線造影コントラスト物質が上方ポート78を通って弁24まで注射器本体18から流れ出始めると直ちに、弁24は、閉じて、リザーバ22に向けた更なる流れを防止する。
【0044】
弁24は、代替的な実施の形態において、コンソール12内で電気回路の制御の下、作動される電磁作動弁又はモータ被駆動弁とすることができる。その何れの場合でも、弁24は、注射過程中に加わるであろう比較的高い圧力に耐えることができる。好ましくは、弁24は、約8273.71kpa(約1200p.s.i)までの流体の静圧に耐え得るものとする。
【0045】
図2Cには、患者への注射過程が図示されている。プランジャ20は、遠隔制御装置14の引金部分66を制御するユーザの相互作用可能な制御の下、前方に進む。プランジャ20の動きは、下方ポート80及びマニホルド26を通じてコントラスト物質を注射器本体18から押し出し、高圧チューブ28を通じてカテーテル30に入れる液圧流体を発生させる。図2Cに図示するように、注射器の下方ポート80及び患者のポート84は、患者への注射過程中、流体が流れ得るように接続されている。
【0046】
マニホルド26は、患者ポート84と注射器の下方ポート80又は変換器/塩水ポート82の何れかとの間の流体接続部の経路を制御する弁を含んでいる。本発明の1つの実施の形態において、マニホルド26は、患者ポート84が、通常、変換器/塩水ポート82に接続されているようにすべく(図2A及び図2Bに図示するように)ばね偏倚されたスプール弁を備えている。プランジャ20の前進動作により、注射器の下方ポート80に圧力が蓄積すると、スプール弁に対する偏倚力を上廻り、注射器の下方ポート80は、患者のポート84に接続され、変換器/塩水ポート82は切り離され、マニホルド26内の弁は、患者への注射過程により発生された高圧力が圧力変換器38に加わらないように保護する。
【0047】
スプール弁は、注射器の下方ポート80から作用する圧力の増加に応答して、患者への注射過程中に自動的に開放する。患者への注射過程の終了時毎にプランジャ20が引込むことで僅かな負圧が作用されたとき、スプール弁は閉じて、その当初の位置に戻って患者へのポート84を変換器38に接続することを可能にする。
【0048】
1つの代替的な実施の形態において、マニホルド26内の弁は、注射器の下方ポート80又は変換器/塩水ポート82の何れか一方を患者のポート84に接続し得るように適宜な時点にて作動される、電子機械的又はモータ被駆動弁である。該アクチュエータ機構はコンソール12により制御される。この代替的な実施の形態においても、弁は圧力変換器38が高圧力に晒されないように保護する。
【0049】
図2Dには、患者への圧力過程が図示されている。装置10は、カテーテル30を通じて監視される患者の血液を読み取ることを可能にする。患者の血圧は患者への注射、塩水のフラッシング及び廃物の吸引過程の間を除いて任意の時点にて圧力変換器38を使用して監視することができる。圧力変換器38により得られた圧力の測定値はストップコック40を手動で開けて且つストップコック34を閉じることにより正常なものとすることができる。圧力変換器38を周囲圧力に露出させることができる。
【0050】
図2Eに図示した食塩水のフラッシング過程中、全ての体内チューブ、圧力変換チャンバ38、チューブ28及びカテーテル30をフラッシングするため塩水溶液が使用される。図2Eに図示するように、蠕動ポンプ44は、塩水溶液がバッグ50から逆止弁46及びチューブ42を通って塩水ポート82まで吸引する方向に作動する。マニホルド26は、塩水ポート82を患者のポート84に接続し、塩水溶液が患者のポート84からチューブ28及びカテーテル30を通じて排出されるようにする。
【0051】
廃物の吸引過程の間、患者のポート84は、再度、塩水ポート82に接続される。この過程中、蠕動ポンプ44は、塩水のフラッシング過程中の回転方向と反対方向に作動する。その結果、患者の流体は患者のポート84から塩水ポート82に吸引され、次に、チューブ42及び逆止弁48を通って廃物集めバッグ52内に吸引される。蠕動ポンプ44は、弁を把み且つ閉塞するチューブ42として機能し、また、逆止弁46、48の各々と相俟って塩水容器50及び廃物容器52への及びこれらからの逆流を防止する。
【0052】
カテーテル30が患者の体内の所定位置にあるときに、患者に薬剤を投与することが望ましい。装置10は、患者の薬剤投与ポート32を提供することによりこのオプションを可能にする。図2Gに図示するように、ストップコック34が開放したとき、ポート32に接続された薬剤供給源は患者のポート84に接続され、これによりカテーテル30に接続される。患者への薬剤投与過程中、蠕動ポンプ44及びプランジャ20は作動していない。
【0053】
図3は、血管造影用注射装置10の作動を制御する制御装置の電気的ブロック図である。電気的制御装置は、遠隔制御装置14及び正面制御盤56からインターフェース102を通じて入力信号を受け取り且つ作動データ、警告、状況の情報及びオペレータのプロンプトを表示すべく信号をディスプレイ58に提供するデジタルコンピュータ100を備えている。
【0054】
コンピュータ100は、モータ104と、モータ増幅器106と、回転計108と、電位差計110と、整流器112と、圧力検知ロードセル114と、A/D変換器160とを含むモータ駆動回路を通じてプランジャ20の動作を制御する。
【0055】
モータ増幅器106は、コンピュータ100からの制御電圧、前進/後進信号及びブレーキ信号並びに回転計108から整流器112を通じて行われる速度フィードバック信号に応答してモータ104に対し駆動信号を提供する。回転計108及び電位差計110の出力は、A/D変換器116を通じて速度モニター及び位置モニター信号としてコンピュータ100に供給される。これらは、コンピュータ100がモータ速度、モータ方向及び位置(容積は計算値)を点検することを可能にする。
【0056】
圧力センサ114は、注射器本体18内のX線造影コントラスト物質に付与される圧力を測定し得るようにモータ電流すなわちプランジャの力を感知する。この圧力の監視信号は、A/D変換器116及びインターフェース102を通じてコンピュータ100に供給される。
【0057】
蠕動ポンプ44は、ポンプモータ120、モータドライバ122、光エンコーダ124を通じてコンピュータ100の制御の下、駆動される。コンピュータ100は、モータドライバ122に対して塩水(前進)及び廃物(逆)駆動信号を提供し、塩水フラッシングのためポンプモータ120を前方向に作動させ、また、廃物吸引のため逆方向に作動させる。光エンコーダ124は、インターフェース102に対して速度方向の監視信号を提供し、該インターフェースは、ポンプモータ120の回転速度及び回転方向の双方を表示する。
【0058】
図3には、弁モータ130が使用されて、一方向弁24のような弁及びマニホルド26内の弁を作動させる、制御装置の1つの実施の形態が図示されている。この実施の形態においては、コンピュータ100は、モータドライバ132を通じて弁モータ130を制御し且つ電位差計134からの位置モニターフィードバック信号を通じて位置を監視する。この特定の実施の形態において、弁モータ130はステッパモータである。
【0059】
コンピュータ100は、温度センサ140からの温度モニター信号に基づいてコントラスト物質の温度を監視する。温度センサ140は、注射器本体18付近に配置されることが好ましい。温度センサ140により感知される温度が過度に高いならば、コンピュータ100は、作動モータ104を不作動にし、患者への注射を中断する。温度が過度に低いならば、コンピュータ100はヒータドライブ150に対し温度作動可能な駆動信号を提供し、該ヒータドライブがヒータ152を作動させる。1つの実施の形態において、ヒータ152は、注射器本体18に隣接して注射器ホルダ116内に配置された抵抗膜ヒータである。
【0060】
また、コンピュータ100は、コントラスト物質ボトルセンサ160、前進制限センサ162、逆進制限センサ164、注射器有無センサ166、チャンバ開放センサ168、コントラスト物質内の気泡検出器170及びチューブ内の気泡検出器172からフィードバック信号を受け取る。
【0061】
コントラスト物質ボトルセンサ160は、リザーバホルダ72内に配置された極小型スイッチである。センサ160からのコントラスト物質有無信号の状態は、リザーバ22がホルダ72内に有るかどうか指示する。リザーバ22が存在しないならば、コンピュータ100は充填過程を不作動にする。
【0062】
前進制限及び逆進制限センサ162は、プランジャ20の最終限界位置を感知する。プランジャ20がその前進限界位置に達したならば、プランジャ20のそれ以上の前進動作は許容されない。同様に、逆進制限センサ164が、プランジャ20がその逆進限界位置に達したと表示したとき、更なる逆進動作は許容されない。
【0063】
注射器有無センサ166は、注射器本体18が注射器ホルダ16内の所定位置に無いことを表示する極小型スイッチ又は赤外線エミッタ/検出器である。注射器本体18が所定位置に無いならば、プランジャ20がその逆進限界位置まで動くことができる(すなわち、零への戻り)動作を除く全ての動作機能が不作動とされる。
【0064】
チャンバの開放センサ168は、注射器ホルダ16の扉70が開放したことを感知する極小型スイッチ又は赤外線エミッタ/検出器である。センサ168からの信号が扉70が開放していることを表示したとき、全ての動作機能は不作動とされる。扉70が閉じ且つ係止されたときにのみ、全ての動作が許容される。扉70が閉じられていると表示され、センサ166は注射器本体18が所定位置にあると表示したならば、装置10の他の通常の機能を進めることができる。
【0065】
気泡検出器170はリザーバ22と頂部ポート78との間に配置され、また、気泡を感知する赤外線エミッタ/検出器であることが好ましい。充填過程中、リザーバ22と頂部ポート78との間の流路内に気泡が感知されたならば、新たなリザーバが接続される迄、充填過程は不作動とされる。
【0066】
気泡検出器172は、高圧チューブ28内の気泡を感知し得るように配置されている。この検出器は赤外線エミッタ/検出器型の気泡検出器であることが好ましいい。高圧チューブ28内で感知された全ての気泡は、全ての流体の押し出し機能を不作動にし、流体が蠕動ポンプ44からの塩水溶液又は注射器本体18からのコントラスト物質であるかどうかを問わずに、全ての流体の押し出し機能を不作動にする。
【0067】
また、図3の制御装置は、コンピュータ100により制御されるリレー180を通じて制御信号をX線装置に提供する機能も備えている。更に、コンピュータ100は、血圧変換器38からのデータ、及び注射装置10から分離した心電図記憶(ECG)装置からのデータを受け取る。圧力信号及びECG信号が、信号調節装置及びA/D変換器190を通じて受け取られ且つコンピュータ100に伝送される。ECG信号は1つの実施の形態において、コンピュータ100により使用され、モータ104の作動(従って、患者への注射過程)を心臓の拍動と同期化させる。
【0068】
心臓への血流は、主として心弛緩期(心臓が収縮と収縮との間にあるとき)に行われる。コントラスト物質を連続的に注射する結果、コントラスト物質は心収縮期(収縮中)に、大動脈に流れ出る。主として、心弛緩の間に注射することにより、冠状動脈内への注射の完全さを損うことなくコントラスト物質の注入量を少なくすることができる。
【0069】
1つの好適な実施の形態において、X線造影コントラスト物質の注射は、冠状動脈の血流と同期化させる。心収縮及び心弛緩の時間期間は、心電図記憶(ECG)の電気信号、動脈の血圧の波形の分析又は振動の速度に基づくその他のタイミングを使用して決定される。モータ104の速度、プランジャ20の速度、従って、その動作を制御することにより、心収縮の期間の間、コントラスト物質の注射が中断され、このことは、この時間の間、コントラスト物質の注射を少なくし又は停止させることになる。遠隔制御装置14と組み合わせて、オペレータはコンピュータ100が心臓サイクルに対してコントラスト物質の注入パルスを自動的に設定する間に、冠状動脈内へのコントラスト物質の注射量を変化させることができる。
【0070】
移動するコントラスト物質の慣性力及びコントラスト物質を保持し且つ該コントラスト物質を患者に送る容器及びチューブの膨張により、注射器本体18内でのプランジャ20の動きとカテーテル30から出て患者の体内に入るコントラスト物質の動きとの間に位相遅れが生じる可能性がある。プランジャ20の動きと患者の体内へのコントラスト物質の導入との間の位相遅れを調節するため、可変の時間的ずれを制御盤54を通じて入力し、心臓サイクルのタイミングを選択した時間だけずらすことができるようにすることができる。位相遅れの大きさは、心臓の速度の周波数に依存するため、コンピュータ100内のアルゴリズムは、コントラスト物質を注射する間の瞬間的な心臓の速度に基づいて、時間のずれの大きさを連続的に且つ自動的に調節する。
【0071】
図4には、本発明の1つの実施の形態の正面制御盤スイッチ56及びディスプレイ58を示す制御盤54の1つの実施の形態が図示されている。正面制御板制御スイッチ56は、準備/充填/終了スイッチ200と、除去スイッチ202と、吸引スイッチ204と、塩水スイッチ206と、作動OKスイッチ208と、注射量制限スイッチ210a、210bと、注射流量制限スイッチ212a、212bと、注射圧力制限スイッチ214a、214bと、立上り時間スイッチ216a、216bと、OKスイッチ218と、注射範囲トグルスイッチ220と、多量注射OKスイッチ222と、停止スイッチ224とを含む。
【0072】
準備/充填/終了スイッチ200は、瞬間的な押釦スイッチである。この押釦が最初に作動されると、ユーザには、注射器18を注射器ホルダ16内に配置するように知らされる。注射器18が注射器ホルダ16内に配置されると(このことは、センサ166によりコンピュータ100に通知される)、ユーザに対しチャンバを閉じ且つ係止するように命令が為される(すなわち、扉70を閉じる)。プランジャ20はその完全な前進位置まで前進して注射器内の全ての空気を追い出す。次に、ディスプレイ58は、オペレータに対し、コントラスト物質リザーバ22を接続するように表示する。一度、コントラスト物質リザーバ22が所定位置に配置されたならば、オペレータはOKスイッチ218を押すように要求される。この時点にて、プランジャ20は最大の注射容量に設定された程度(好ましくは、10ml/秒の流量に対応する)にて引込む。実際の速度(A/D変換器116からコンピュータ100へのフィードバックとして表示される)が設定速度よりも速いならば、装置10は停止する。
【0073】
一度、プランジャ20がその最後方位置になったならば、モータ104を作動させて、プランジャ20を前進させ、全ての気泡を除去する。圧力センサ114は、一方向弁24が閉じられ且つ圧力が注射器本体18内に蓄積し始めたときを表示する。一度、気泡の除去が完了したならば、注射した総量及び注射回数のカウンタが再リセットされる。
【0074】
また、スイッチ200の作動は、プランジャ20が引込み且つ注射器本体18から非係合状態となることも許容する。
除去スイッチ202は、保護された瞬間的な押釦スイッチである。除去スイッチ202は、作動されると、プランジャ20を前方に動かして、空気を頂部ポート78を通じて追い出す。プランジャ20の前進動作は制限され、注射器18内にて所定の圧力に達したときに停止される。この状態は、圧力センサ114により感知される。除去スイッチ202により開始される除去過程により、注射器20内の空気を追い出すことになる。また、除去スイッチ202を連続的に押し且つ保持することにより、ユーザは除去スイッチ202を使用して流体を患者のポート84を通じて除去することができる。
【0075】
吸引スイッチ204は、コンピュータ100を介して蠕動ポンプ44のポンプモータ120を作動させる瞬間的な押釦スイッチである。ポンプモータ120は作動して、設定した速度にてカテーテル30を吸引する。吸引された流体は、廃物バッグ52内に集められる。他の全ての動作機能は、吸引中に、非係合状態とされる。モータ120の実際の速度が設定した所定速度以上であるならば、コンピュータ100は、モータ120を停止させる。
【0076】
塩水スイッチ206は、1つの代替的な動作スイッチである。ポンプモータ120は、塩水スイッチ206を押すことに応答して動作され、バッグ50からの塩水の溶液は、設定した速度にてマニホルド26及びカテーテル30内に導入される。塩水の流れを停止させるため、10秒以内に、塩水スイッチ206が二回目に押されないと、コンピュータ100は、ポンプモータ120を自動的に停止させる。制限時間が満了したならば、更なる任意の動作を開始する前に、塩水スイッチ206をその最初の状態にリセットしなければならない。
【0077】
動作OKスイッチ208は、瞬間的な押釦スイッチである。ある限界値以外の注射を完了したときに不作動機能を装置が検知した後、OKスイッチ218を作動させ且つ更なる任意の機能を開始する前に、作動OKスイッチ208を作動させなければならない。
【0078】
任意の一回の注射の間に、装置が注射するであろう最大注射量を増すか又は減らすかの何れかのために、注射量制限キー210a、210bを押す。キー210aは、最大量を増し、また、キー210bは減少させる。一度、注射最大制限量が設定されたならば、測定量がその設定値に達したとき、コンピュータ100はモータ104を停止させ、また、OKスイッチ218が押される迄、再始動しない。多量の注射(すなわち、10ミリリットル以上)が選択されたならば、OKスイッチ18及び他の多量注射OKスイッチ220の双方は、その多量の注射の開始前に、再リセットしなければならない。
【0079】
注射流量制限キー212a、212bは、一回の注射にて達することのできる装置内の最大流量を医師が選択することを可能にする。測定量(回転計108及び電位差計110からのフィードバッグ信号により決定される量)が設定値に達すると、コンピュータ100は、流量を設定値に制限し得るようにモータ104を制御する。
【0080】
注射圧力制限キー214a、214bは、一回の注射にて達することのできる装置内の最大圧力を外科医が選択することを可能にする。圧力センサ114により決定された測定圧力が設定値に達すると、コンピュータ100は、圧力を注射限界圧力に制限されるようにモータ104を制御する。その結果、注速度も制限されよう。
【0081】
立上り時間キー216a、216bは、任意の一回の注射の間に流量を変化させる一方にて、装置が可能な許容する立上り時間を外科医が選択することを可能にする。コンピュータ100は、立ち上がり時間を設定値に制限し得るようにモータ104を制御する。
【0082】
別の実施の形態において、キー210a、210b、212a、212b、214a、214b、216a、216bは、数値を選択する他の装置と交換することが可能である。これらは、セレクタダイヤル、数値キーパッド及びタッチスクリーンを含む。
【0083】
OKスイッチ218は、機能及び機器センサをリセットする瞬間的な押釦スイッチである。OKスイッチ218の作動に応答して、コンピュータ100は、ディスプレイ58を制御して、正確な機能が選択されと認めるかどうかをオペレータに質問する。OKスイッチ218を作動させると、状態は準備完了にセットされる。
【0084】
注射範囲スイッチ220は、トグルスイッチである。スイッチ220が「少量」又は「多量」位置にあるかどうかに対応して、このスイッチは、次の注射のため多量又は少量注射量範囲を選択する。
【0085】
多量注射OKスイッチ222は、瞬間的な押釦スイッチである。注射範囲スイッチ220により多量注射範囲が選択されると、多量注射範囲OK押釦スイッチ222は、OKスイッチ218を作動させ得るように作動させなければならない。注射する毎に、OKスイッチ218を作動させなければならない。多量注射のとき、ユーザは、第一の多量注射OKスイッチ222を、次に、OKスイッチ218を作動させることにより、容積を確認することが必要とされる。
【0086】
停止スイッチ224は、瞬間的な押釦スイッチである。停止スイッチ224を押すと、このスイッチは、全ての機能を不作動にする。ディスプレイ58は、作動状態のままである。
【0087】
ディスプレイパネル58は、準備ディスプレイ250と、状況ディスプレイ252と、警告ディスプレイ254と、制限ディスプレイ256と、総注射回数ディスプレイ260と、総注射量ディスプレイ262と、流量ディスプレイ264と、注射量ディスプレイ266と、注射量制限スイッチ268と、注射量制限ディスプレイ270と、制限圧力ブィスプレイ272と、最小立上り時間ディスプレイ274と、多量注射ディスプレイ276と、リアルタイムクロックディスプレイ278とを含む。
【0088】
準備ディスプレイ250は、オペレータが準備過程を経るのに伴って表示される一連のメッセージを含んでいる。準備ディスプレイ250にてメッセージを表示することは、上述したように準備スイッチ200を作動させることにより開始される。
【0089】
状況ディスプレイ252は、幾つかの異なる作動状態の1つを点滅により表示する。図4に図示した実施の形態において、表示可能であるこれらの状況の状態は、「準備完了」、「準備」、「注射」、「フラッシング」及び「吸引」を含む。
【0090】
警告ディスプレイ254及び制限ディスプレイ256は、装置10が臨界的な制御パラメータに遭遇し且つ不作動にするか、又は上限値又は下限値に達して且つ制限された仕方にて作動し続けるか又は上限値又は下限値に達して且つ作動を続ける状態にあるかどうかをオペレータに知らせる。
【0091】
総注射回数ディスプレイ260は、現在の患者の場合に与えられた総注射回数(累積数)を表示する。この現在の患者の場合の間に注射された累積的な総量は、総量ディスプレイ262により表示される。
【0092】
ディスプレイ264及び266は、現在の又は過去の注射に関する情報を提供する。ディスプレイ264は、注射の間、患者に対するリアルタイムの流量のデジタル値にて示す。一度、注射が完了したならば、ディスプレイ264に表示された値は、その注射の間に達した最高流量を表す。ディスプレイ266は、直近の注射時に注射した量のデジタル値を示す。
【0093】
ディスプレイ268は、スイッチ210a、210bにより選択された最小の注射量をデジタル形態にて示す。同様に、ディスプレイ270は、スイッチ212a、212bにより選択された装置が許容する最大の流量のデジタル値を表示する。
【0094】
ディスプレイ272は、装置が注射器18内に発生することを許容する最高圧力のデジタル値を示す。圧力の限界は、スイッチ214a、214bにより選択される。
【0095】
ディスプレイ274は、流量を変化させつつ、装置が許容する最小立上り時間を示す。この最小立上り時間は、スイッチ216a、216bを通じて選択される。
【0096】
大注射ディスプレイ276は、オペレータによって大注射スケールが選択されたときを明確に表示する。
リアルタイムクロックディスプレイ278は、現在の時間を時間、分及び秒にて示す。
【0097】
図5A及び図5Bには、ユーザの手に適合する設計とされた主ハウジング300を有する遠隔制御装置14が示してある。引金部66は、ハウジング300に対して可動であり、引金部66の位置は、引金部の位置の関数である命令信号を発生する。1つの実施の形態において、引金部66は、ハウジング300内の電位差計に連結されている。命令信号は、注射量又は速度を制御する。この流量は、引金部の位置に直接比例している。
【0098】
リセットスイッチ62は、その機能がOKスイッチ218と同一である瞬間的な押釦スイッチである。これと代替的に、リセットスイッチ62は、また、「OK」と表示することもできる。
【0099】
遠隔制御装置14上に設けられた塩水スイッチ64は、オンにするときに押し且つ再度オフにするときに押す選択的動作の押釦スイッチである。塩水スイッチ62の機能は、正面操作盤54上における塩水スイッチ206の機能と同一である。
【0100】
本発明の別の実施の形態にて示すように、足踏みペダルの形態の1つの代替的な遠隔制御装置14´は、図1及び図5A、図5Bに図示した手持ち型の遠隔制御装置14に代えて使用される。足踏み遠隔制御装置14´は、命令信号を提供する足踏み式速度ペダル又は引金部66´と、リセット又はOKスイッチ62´と、塩水スイッチ64´とを有している。カバー310、312は、スイッチ62´、64´を保護し、これらのスイッチが手によってのみ作動され、偶発的に足で作動されないようにする。足踏み式遠隔制御装置14´は、ケーブル60´によりコンソール12に接続されているが、これと代替的に、無線リンクにより接続してもよい。
【0101】
図7A乃至図7D、及び図8A乃至図8Cには、コントラスト物質の充填、空気除去及び患者への注射過程中における一方向弁24及びマニホルド26の構造及び作用が示してある。
【0102】
図7A及び図8Aには、コントラスト物質の充填過程中の一方向弁又は逆止弁24と、マニホルド26と、注射器本体18と、プランジャ20とが示してある。一方向弁24の入口逆止弁は、図7A及び図7Bにおいて、弁チャンバ352内のその下方着座位置に配置された重いボール350を有している。コントラスト物質は、プランジャ20が後方に動くことにより注射器本体18内に吸引される。コントラスト物質は、ボール350の周りの通路354を通って上方ポート78内に流れる。
【0103】
マニホルド26は、スプール本体362と、軸364と、Oリング366、368、370と、偏倚ばね372と、リテーナ374とを有するばね負荷式のスプール弁360を有している。図7Aに図示するように、コントラスト物質の充填過程中、偏倚ばね372は、スプール本体362を注射器本体18に向けたその最右側位置に付勢する。この位置において、スプール本体362は、変換器の塩水ポート82を対角状通路376を通じて患者のポート84に接続する一方にて、注射器本体18の下側部分80を妨害する。一方にて、Oリング366、368、他方にて、Oリング370は、流体シールを提供し得るように対角状通路376の両側に配置されている。
【0104】
図7B及び図8Bには、空気除去過程が示してある。注射器本体18には、コントラスト流体が充填されているが、空気も取り込んでいる。プランジャ20は、上方ポート78及び逆止弁24を通って空気を注射器本体18から追い出し得るように前方に駆動される。空気の力は、逆止弁20内のボール350を僅かに持ち上げる。しかしながら、ボール350は、十分に重く、注射器本体18から且つリザーバ22に向けて後方に押し出される空気は、ボールが注射器本体18から空気の流れを遮断するであろうその最上方の着座位置までボールを持ち上げることはできない。
【0105】
空気除去過程中、スプール弁360は、図7Aに図示した位置と同一の位置にある。対角状通路376は、変換器塩水ポート82を患者のポート84と接続する。その結果、圧力変換器38による圧力の監視は、空気除去過程(また、コントラスト物質の充填過程)中に行うことができる。
【0106】
図7C及び図8Cには、空気除去過程の終了時で且つ患者への注射過程中の開始時におけるマニホルド26及び逆止弁24の状態が図示されている。
図7Cにおいて、全ての空気は、注射器本体18から追い出されている。ボール350は、X線造影.コントラスト物質上にて浮動し、このため、全ての空気を除去し且つX線造影コントラスト物質が注射器本体18から流れ出て且つ上方ポート78を通って弁チャンバ352に入り始めるとき、ボール350は、その上方の着座位置に向けて上方に動かされる。ボール350は、図7C及び図8Cに図示するように、X線造影コントラスト物質が上方への流れを続けるのを妨げる。
【0107】
図7Cに示した状態において、注射器本体18内の圧力、具体的には、下方ポート80内の圧力は、未だ、ばね372の偏倚力を上廻るレベルに達していない。その結果、スプール本体362は、未だ、左方向に動いておらず、対角状通路376は、変換器の塩水ポート82を患者のポート84と接続することを続ける。
【0108】
図7Dには、患者への注射過程が示してある。プランジャ20は、前進しており、入口逆止弁24は閉じられている。下側部分80における圧力は、ばね372の偏倚力に打ち勝つのに十分に大きくなっている。スプール本体362は、下方ポート80が患者用のポート84と接続されるように、左方向に駆動されている。これと同時に、スプール本体362は、変換器/塩水ポート82を妨害する。
【0109】
スプール弁360の作動のため、プランジャ20及び注射器本体18の動きによって発生した高圧力は、患者のポート84に直接、接続される一方、塩水ポート82及び圧力変換器38は、高圧から保護されている。作動圧力は、製造後、注射器の予負荷を増し又は減少させることにより可変とし且つ決定することができる。
【0110】
当業者は、全体的な血管造影用注射装置10の他の形態が構成可能であることが理解されよう。例えば、1997年10月24日に出願された「二重ポート注射器(Dual Port Syringe)」という名称の同時出願係属中の米国特許出願第08/957,228号に記載された、引用する血管造影用注射装置の代替的な注射器及び取り付け装置部分を採用して上記に説明したものと交換し且つ/又はその物を改変することも可能である。更に、当業者は、例えば、1997年10月24日に出願された「自動式の高圧/低圧切換え機能を備える血管造影用注射装置(Angiographic Injector System with Automatic High/Low Pressure Switching)」という名称の同時出願係属中の米国親特許出願第08/957,801号に記載されたような組立体のマニホルド部分、及び遠隔制御装置14の他の形態に関するその他の改良が理解されよう。遠隔制御組立体の幾つかの代替的な形態は、1997年11月6日に出願された「空圧制御装置及び方法(Pneumatic Controller and Method)」という名称の同時出願係属中の米国特許出願第08/965,583号、1997年11月6日に出願された「携帯型空圧制御装置(Hand−Held Pneumatic Control Device)」という名称の米国特許出願第29/079,023号及び上記の引用出願に記載されており、これら出願の全ては参考として引用し本明細書に含めてある。
【0111】
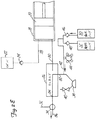
先の図面の血管造影用注射装置の一つの代替的な実施の形態は、全体として図9a及び図9bに参照番号10´で示してある。図9に示した実施の形態において、血管造影用注射装置10の構成要素の幾つかの物理的な位置は、装置の使用を容易にするため再配置されている。例えば、上記の第一の実施の形態のユーザインターフェース54、制御スイッチ56及びディスプレイ58は、単一の制御盤400内に一体化されている。図示した第二の実施の形態において、制御盤400は、最適な配置となるようにユーザが切り離し且つ再接続することが可能な旋回基部の上でコンソール又は注射装置のヘッド12´に取り付けられる。図9の形態の機械的な概略図が図10に図示されている。図9及び図10を参照すると、電源59´の回路は、コンソール12´から分離して物理的に取り付けた状態で示してある。コンソール及び電源は全体を参照番号402で示したカートに取り付けられ、該カートは、移動が容易なように車輪を含み、また、該カートは、その所期の方法にて使用されるとき安定性を提供し且つ傾きを阻止し得るような設計とされることが好ましい。このカートは、コンソール及び電源組立体を迅速に取り付け且つ取り外し、コンソール及び電源を床又は合わさる接続装置が設けられたその他の静止した装置に結合することを可能にする。図10を参照すると、手動制御装置14´は、制御盤400に作用可能に接続された状態で示してあり、蠕動ポンプ組立体44´は、コンソール12´に物理的に取り付けた状態で示してある。本発明の第一の実施の形態に関して上述した注射器を保持する組立体及び関係する構成要素は、全体として、「取り付けチャンバ」404で表示した機能ブロックにより示してある。上述し且つ「使い捨て型物品」として表示した構成要素(すなわち、注射器、注射器本体内のピストン、コントラスト物質弁、患者のマニホルド、コントラスト物質スパイク及び患者の血圧ポート)は、全体として機能ブロック406により示してある。
【0112】
血管造影用注射装置10´の第二の好ましい制御形態の電気的機能ブロック図は、図11に示してある。多数の図面(図11a、図11b)は、全体として、血管造影用注射装置10´の電気的制御回路網を備えている。図11の回路網の説明を容易にするため、第一の実施の形態の比較可能な電気的構成要素について以前に使用した番号は必ずしも図11の同様の機能の制御構成要素の説明に使用してされているわけではない。図11を参照すると、制御装置は、各々注射装置の監視及び制御機能に対する知能を有する2つの別個のコンピュータ装置を含んでいる。以前の実施の形態と同様に、コンピュータ装置は、全体として、制御盤400から入力信号を受け取り且つデータ、警報、状況の情報及び操作者プロンプトを表示するための信号を提供する。好ましい実施の形態において、コンピュータ装置は2つのマイクロコンピュータを備えている。全体として参照番号410で示したPCプロセッサは、制御装置のマスタープロセッサとして機能し、全体として参照番号412で示した組み込み式プロセッサはスレーブプロセッサとして機能する。一般に、マスタープロセッサは、組み込み式プロセッサに対し命令を実行するように指図するが、その双方のプロセッサは行われた動作を監視する。その双方のプロセッサは安全のため動作の独立的なモニタとして機能する。注射装置のモータの動作及び蠕動モータの動作のような重要な機能は、双方のマイクロコンピュータにより監視される。好ましい実施の形態において、PCプロセッサ410は、386DOS中央処理装置を備え、組み込みコア型プロセッサ412は、HC16ビットの中央処理装置を備えている。本発明の精神及び目的の範囲内でその他の型式のマイクロプロセッサを使用することも可能であることが理解されよう。
【0113】
図11を参照すると、PCプロセッサ410は、第一の通信バス414により装置の全体に亙って電気的構成要素と連通し、組み込みコア型プロセッサ412は、第二の通信バス416により装置の全体に亙って電気的回路と連通することが理解されよう。2つのプロセッサは、そのそれぞれのバス及び全体として参照番号417、418で示した一対の通信レジスタにより互いに連通している。全体的な「監視/電源停止/リセット」機能は機能ブロック419で示してあり、ECGで獲得した情報は、その双方のマイクロプロセッサで処理し得るように機能ブロック420により先入れ先出し基準に基づいて集めることができる。一般に、装置の色々な電気的機能ブロックと2つのバス414、416の間の連通の型式は、それぞれの電気的機能ブロックと関係した図11の個々の信号流路及びこれら信号流路内の信号の流れ符号により示してある。
【0114】
図11を参照すると、取り付けチャンバ404と関係した色々な電気的機能及び検知機能は、次のものを含む。すなわち、使い捨て型の注射器を取り付けチャンバ内に装填するために使用される前側装填チャンバが閉じたときを表示する「チャンバ閉」という名称のセンサ(422)と、瓶ホルダ内に配置され、瓶内に流体が存在するかどうかを表示する「コントラスト物質空」により表示されるコントラスト物質瓶センサ(423)と、患者のマニホルド弁及びコントラスト物質の弁の状態を決定すべくコンピュータが使用する「上方及び下方弁センサ」と表示された2つの弁センサ(424)と、注射器及び使い捨て物品内の気泡の検知を容易にする「ELバックライト」という名称のエレクトロルミネッセントバックライト(425)と、注射器本体に隣接して注射器ホルダ内に配置された「コントラスト物質ヒータ」と表示された加熱要素(426)と、コントラスト物質を比較的一定の温度に保ち得るようにコントラスト物質ヒータを制御する信号を提供すべく注射器本体付近に配置された「RTD温度センサ」と表示された一対の温度センサ(427)と、患者に圧送された流体に泡又は空気コラムが存在しないかどうか監視する高圧管内の空気を検知するように配置され、「泡検知」と表示された空気コラム検知センサ(428)とを含む。図11に図示するように、ELバックライト425を除いて、取り付けチャンバ内のセンサの各々が双方のプロセッサと連通する。
【0115】
一般に、制御盤400は、アームライト430と、スピーカ431と、タッチスクリーン432と、ディスプレイ433と、非常用スイッチ434とを含んでいる。アームライト430は、注射装置が注射を行う準備が完了したときに点灯する。スピーカ431は、ユーザに対して可聴のインターフェース通信を提供することのできるオプション的な機能部分である。ディスプレイ433は、好ましい実施の形態において、装置の作動状態を表示するために使用される液晶(LCT)パネルである。タッチスクリーン432は、LCDパネルに重ねられ且つ以下に更に詳細に説明するように、装置を制御するためユーザが使用するものである。制御盤の全ての機能はPCプロセッサ410と直接的に連通している。非常用スイッチ434は、通信バス414、416と、及び以下に説明する遮断リレー及び注射装置のモータのソリッドステートリレーと直接的に連通する。
【0116】
手動制御機能ブロック14´は、手動の遠隔制御装置の回路機能を含んでいる。上述したように、手動制御装置は、ユーザが作動させたとき、手動制御装置の変位量に比例する電気信号を出力する仕方にて血管造影用注射ポンプを制御するために使用される装置である。該制御装置は、図11に図示するように、マイクロプロセッサの双方と連通する能動的な電子機械的装置である。手動制御装置は、対象物の位置を遠方から決定することができ、また、制御装置の手操作可動部分の作用可能な移動距離及び配置位置を決定するために使用される一対の密封した接触センサを含んでいる。センサは、「アナログホール効果」(440)及び「デジタルホール効果スクィーズ」(441)として表示された2つの機能ブロックにより表示されている。塩水リセット機能は、「塩水リセット釦」(442)により表示され、「制御型且つ接続」と表示された機能ブロック(443)は、手動制御装置を通じてマイクロプロセッサに対し装置が「一定量」又は「可変量」の注射を行うために使用されているかどうかに関して設定状態を表示する。可変量作動モードのとき、操作者は、所定の最大流量まで手動制御装置により瞬間的な注射量を変化させることが可能である。一定の作動モードにおいて、操作者が手動制御装置のアクチュエータを握ると、注射過程の前に、制御装置に入力した所定の一定の流量にてコントラスト物質を注射するだけで制御装置は応答する。
【0117】
蠕動ポンプ44´は、マイクロプロセッサの制御の下、ポンプモータ及びモータ駆動体により駆動される。全体として、「PWN制御回路」(450)で表示したモータ駆動体は、蠕動ポンプモータに対しパルス幅変調した制御信号を提供する。コンピュータは、モータ駆動体に対して前進(塩水)及び逆進(廃物)駆動信号の双方を提供し、ポンプモータを塩水フラッシングのため前進方向に作動させ且つ廃物の吸引のため逆方向に作動させる。好ましい実施の形態の蠕動ポンプは、「過速度/過トルク」センサ451及び「遮断リレー」452を有している。過速度/過トルクセンサ451は、ポンプ駆動回路450を介して蠕動ポンプの速度を正確に制御すべくマイクロプロセッサにフィードバック信号を提供する。遮断リレー452は、マイクロプロセッサ又は非常用停止スイッチ434の何れかにより作動させることができる。
【0118】
注射装置モータ460は、注射器内のピストン又はワイパーを動かし得るように作用可能に接続され、また、「モータ制御装置」の増幅器(461)により制御される。好ましい実施の形態において、モータ駆動体461は、以下に説明する入れ子式ループ制御の形態により正確に制御することのできるオフザシェルフサーボ増幅器である。全体として、モータ増幅器は、制御電圧に応答してモータに駆動信号を提供する。前進、逆進及び中断信号は、コンピュータから送られ、光エンコーダからの速度フィードバック信号を使用して速度を制御する。モータの状態の監視は、全体として、「モータ状態過速度/過トルク」という名称の機能ブロック(462)及び「エンコーダ」機能ブロック(463)により表示されたモータ速度及び位置を検知する独立的な光エンコーダセンサによって表示される。モータの絶対的な「位置」を表示する組み込み式マイクロプロセッサにバックアップ信号を提供するため電位差計が使用される。この電位差計は、「絶対位置ポット」機能ブロック(464)としてブロック図内に示してある。光エンコーダ及び電位差計の出力は、プロセッサに対し速度モニタ信号及び位置モニタ信号として供給され、コンピュータがモータ速度、モータの方向及び位置を確認することを可能にする。一対の前進及び逆進限界センサが注射器のピストンの端部限界位置を検知し、「F/Rリミットスイッチ」(465)という名称の機能ブロックにより表示される。ピストンがその前進限界位置に達すると、更なる前進動作は許容されない。同様に、逆進限界センサがピストンがその逆進限界位置に達したことを表示したとき、更なる逆進動作は許容されない。また、注射装置のモータ制御装置は、プロセッサ又は非常用スイッチ434の何れかからの命令の下、注射装置のモータを不作動にするソリッドステートリレー(470)も含んでいる。
【0119】
電源59´は、装置に全ての電力を提供し、また、110乃至120ボルトAC又は220乃至240ボルトACの何れかへの電源の接続を選択することを可能にする、外部から選択可能な電圧範囲スイッチ59a´を含んでいる。好ましい実施の形態において、通常電源電圧作動周波数は、47乃至63Hzの範囲にあることを要し、通常電源電圧は10アンペアの電流を運び得ることを要する。該電源は、電力インジケータライト59b´と、オン/オフスイッチ59c´と、シャーシ12´内の回路に達するケーブル用のコネクタを提供するケーブルコネクタ59d´とを更に含んでいる。
【0120】
注射装置モータ460を制御する好ましい入れ子式制御ループの形態に対するより詳細な電気的機能ブロック回路の回路網が図12に図示されている。この図を参照すると、注射装置モータ460は、好ましい実施の形態において、サーボ増幅器回路網の回路461により制御されるブラシレス直流モータである。好ましい実施の形態において、サーボ増幅器回路網461は、ブラシレス直流モータを高スイッチング周波数にて駆動し得るよう指定されたBE30AシリーズPWMブラシレスサーボ増幅器モデルBE25A20である。好ましい実施の形態において、サーボ増幅器は、速度制御のため直交(quadrature)エンコーダフィードバック入力信号を使用する。サーボ増幅器は、全体として参照番号461aで示した出力駆動ポートと、フィードバック信号入力ポート461bと、速度制御信号入力ポート461cと、一対のアナログ出力信号ポート461d、461eとをそれぞれ有している。出力ポート461dは、増幅器内で発生され、モータ460の圧力又はトルクに比例する電圧信号を運び、「アナログ電流」ラインと称される出力フィードバックラインに信号を提供する。出力ポート461eはサーボ増幅器内で発生され、モータ460の速度に比例する電圧信号を運び、「アナログ速度」と表示されたラインに対し信号を提供する。光直交エンコーダ(図12に図示せず)が注射装置モータ460の出力駆動体に作用可能に接続され(図11に参照番号463で表示)、サーボ増幅器461のフィードバック入力ポート461bに対しパルス列フィードバック信号を供給して戻し、サーボ増幅器461を通じてモータ460の速度を正確に制御する。このループは、図面にて第一のループ又は「サーボループ」として表されている。好ましい実施の形態において、サーボ増幅器461は、この標準的なサーボループ形態を通じて注射装置のモータ460の速度を極めて正確に制御し、しかも更なる制御を殆ど必要としないオフザシェルフ増幅器である。また、直交エンコーダ信号は、参照番号472で示した信号調整デコード回路を通じて一対のカウンタ473、474に供給して戻され、該一対のカウンタ473、474は、それぞれ組み込み式プロセッサ412及びPCプロセッサ410にそれぞれ合計カウント信号を提供する。サーボ増幅器461の出力ポート461d、461eからのアナログ電流及びアナログ速度信号は、組み込み式プロセッサ412への入力信号として直接、供給され、それぞれ、「モータ状態過速度/過トルク」機能ブロック462の比較器462a、462bの第一の信号入力にそれぞれ付与される。比較器462a、462bに対する基準信号入力は、「基準トルク」及び「基準速度」入力信号に対応するPCプロセッサ410から入力信号を受け取り得るように接続されている。
【0121】
比較器462a、462bは、それぞれ、サーボ増幅器461から受け取ったフィードバック信号をPCプロセッサ410から受け取った基準電圧信号と比較し、図12に図示するように、組み込み式プロセッサ412及びPCプロセッサ410の双方に、それぞれ「過トルク」及び「過速度」を表す信号出力を提供する。
【0122】
注射過程中、マスターPCプロセッサ410は、組み込み式プロセッサ412に対し注射を行うように命令する。この命令の一部として、組み込み式プロセッサには、PCプロセッサにより、所望の流量及び許容される最大圧力が知らされる。PCプロセッサが注射命令を発する直前に、該プロセッサは、2つの比較器462a、462b内で基準電圧値を設定し、その一方は、組み込み式プロセッサが実現することが可能な最大流量を表し、もう一方は、許容可能な最大圧力を表す。注射中、サーボ増幅器461からの「アナログ電流」及び「アナログ速度」フィードバック信号は、比較器462a、462bにフィードバックされる。これらフィードバック信号の何れかが比較器のそれぞれの基準電圧を上廻るならば、作動された比較器によって適当な出力信号がプロセッサの双方に提供される。何れかのプロセッサが比較器から一方又は双方の信号を受け取るならば、プロセッサは、注射装置モータ460への電力を遮断し、注射を直ちに停止させる。
【0123】
注射中、組み込み式プロセッサ412は、デジタルエンコーダ463を使用してラム又は注射器ピストンの現在の位置を決定する。好ましい実施の形態において、注射されたコントラスト物質の各ミリメートル当たり、エンコーダ463から1,317のカウント値を受け取る。ピストンが注射中に移動すると、組み込み式プロセッサが各10ミリ秒毎にラム又はピストンの現在の位置を確認する。次に、組み込み式プロセッサは、簡単な不等辺四辺形状の移動に基づいて、ラムの理論的な位置を計算する。現在の位置が実際の位置と所定のミリメートル以上相違するならば、注射を停止させ、誤差を報告する。
【0124】
「アナログ位置」信号を提供する電位差計454は、同様の方法で使用されるが、その製造許容公差はより大きい。ラム又はピストンの移動を較正する間、装置は、ミリメートル当たりの移動毎のオーム数を表す定数を計算する。注射中、組み込み式プロセッサが同一の理論的な不等辺四辺形状の動作を使用して、ピストンの理論的位置を決定する。デジタルエンコーダの方法の場合と同様に、ラムの現在の位置が実際のアナログ位置の測定値から所定のオーム以上、相違するならば、注射が停止され、誤差が報告される。
【0125】
従って、入れ子式ループ制御回路網が設定され、この場合、モータ460の直接的な主サーボフィードバックループ制御はデコーダ回路472及びカウンタ473を通じてフィードバックされたエンコーダ信号及び組み込み式プロセッサ412を通じて提供された「誤ループ」制御により補充されて、サーボ増幅器461の信号入力端子461cに戻される。第一のすなわち「サーボループ」は、比例積分を使用する標準的な速度制御ループである一方、外側の「誤ループ」は、サーボループがモータ速度を正確に制御することを確実にするためサーボループ制御を単に定期的に点検する位置制御ループである。モータ460のギヤトレーンの出力に作用可能に接続された電位差計は、単に、エンコーダループに対するバックアップとして機能する絶対位置センサである。同様に、カウンタ474を通じてPCプロセッサ410へフィードバックするエンコーダは、プロセッサ412がその所定の方法にて、二次的な「誤ループ」を通じて速度補正信号を提供する作動をしなかった場合、組み込み式プロセッサ412を通じて主誤ループ制御に対する冗長的バックアップとして機能する。
【0126】
上記に簡単に説明したように、多数のプロセッサが利用可能であることは、その双方の検知回路中の情報を使用する真の多数の冗長検知機能を提供することになる。更に、二重又は多重プロセッサの特徴は、注射モータの動き及び蠕動ポンプの動きといったような装置の重要な機能を冗長制御し且つ安全機能を監視する能力を提供することになる。これら状態の双方は、上述し且つ図11及び図12に図示するように、双方のマイクロプロセッサによって能動的に監視される。例えば、注射モータに対する「過速度安全回路」は、デコーダ回路472及び一対のカウンタ473、474を通じて2つのプロセッサに信号を供給する直交エンコーダ463により提供される。エンコーダの情報を受け取るため独立的な2つのプロセッサを使用することは、流量を感知する安全回路として機能する。その理由は、組み込み式プロセッサ及びPCプロセッサの双方がパルスを計数して、注射流量を決定するからである。上述したように、個々のカウント値は、特定の時間間隔に亙って合計して平均速度を計算する。安全機能は、過速度状態のとき、何れかのプロセッサがそれ自体の決定能力に基づいて注射装置のモータを独立的に停止させることができることによって、提供される。
【0127】
同様に、過速度安全回路を提供するために使用したものと同一のハードウェアにより、「過剰量の安全回路」が提供される。エンコーダからカウンタ473、474を通って組み込み式プロセッサ及びプPCプロセッサに提供されたパルスは、その双方のプロセッサがパルスを独立的に計数して、注射量を決定することを可能にする。過剰量の状態のとき、一方のプロセッサは、注射装置のモータを独立的に停止させることができる。
【0128】
多数のプロセッサを必要としない更なる二重安全の特徴は、電位差計464から受け取った「アナログ位置」信号により提供され、この信号は、組み込み式プロセッサが電位差計からのアナログ電圧値の変化を読み取ることによりその量を点検することを可能にする。電位差計を四分エンコーダに対するバックアップとして提供することにより、注射量を感知するための更なる二重の冗長安全性が提供される。
【0129】
注射装置のモータの「過電流」及び「過速度」状態について上述したように、二重冗長のモータ安全回路が提供される。これらの回路は、比較器462a、462bに関して上述した。比較器462aは、サーボ増幅器461からの「アナログ電流」フィードバック信号を使用して、組み込み式プロセッサ及びPCプロセッサの双方に二重の入力信号を提供して、プロセッサ電流測定の安全回路を二重に感知することを可能にする。同様に、比較器426bは、サーボ増幅器461からの「アナログ速度」信号の結果としてプロセッサの双方に二重入力信号を提供し、注射装置のモータ速度を二重に冗長感知することを可能にする。
【0130】
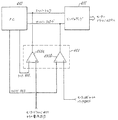
蠕動ポンプ44´を制御するため同様の安全回路が設けられている。図11に図示するように、該蠕動ポンプは、過速度/過トルク回路網451も備えている。好ましい実施の形態において、蠕動ポンプ44´は、注射装置モータのようなブラシレスモータではなく、PWM制御回路450からパルス幅変調入力信号を受け取る。ポンプモータ44´は、モータドライバ回路450からの出力電流と共に検知され且つフィードバック信号として使用することのできる後方EMFを発生させる。この蠕動ポンプの安全回路の電気ブロック図が図13により詳細に図示されている。この図面を参照すると、PCプロセッサ及び組み込み式プロセッサは、それぞれ参照番号410、412で示してある。図13に図示した安全回路は、実質的に、注射装置のモータの速度及び電流を感知するために使用される回路と同一である。過速度/過トルク回路網451の一対の比較器451a、451bが注射装置のモータの安全回路に関して上述した比較器462a、462bと同様の方法で使用される。比較器451aは、プロセッサの双方に対し過トルク出力信号を提供し、比較器451bは、双方のプロセッサに過速度入力信号を提供する。比較器451は、PCプロセッサ410からトルクの基準電圧信号を受け取り、比較器451bは、プロセッサ410から速度基準電圧信号を受け取る。比較器451aは、モータドライバ回路網450からの電流出力信号を監視し、その監視した電流出力信号がプロセッサ410から提供されたトルク基準信号を上廻る時、常に、出力信号を提供する。比較器451bは、モータ44´からの後方EMF信号を監視し、後方EMF信号がプロセッサ410より供給される速度基準電圧信号を上廻る時、常に、出力信号を提供する。組み込み式プロセッサ412は、モータドライバ450に対し主駆動制御信号を提供する。
【0131】
図9に図示した本発明の実施の形態において、電源の作動及び非常用停止スイッチの作動を除いて、装置と操作者/ユーザの全てのインターフェースは制御盤を介して行われる。装置の1つ又は複数のプロセッサとの通信は、ディスプレイ433に重なり合うタッチスクリーン432におけるスイッチを通じて行われる。コンピュータはディスプレイに色々なスクリーンを発生させ、タッチスクリーンのタッチパッドと整合した適当なシミュレート型スイッチインジケータを有し、このことは、操作者がタッチスクリーンを通じてマイクロプロセッサと通信することを可能にする。装置に通電すると、制御盤のディスプレイは、ユーザに対し、装置がそれ自身の診断試験を行っていることを知らせる。診断及び較正試験の後、ディスプレイは操作者に対し一連の命令を提供する色々な設定ウィンドウを提供し、この設定ウィンドウは、全体として、注射器の装填、係止及び充填、処分可能な接続及び洗滌を含むステップバイステップの設定手順を通じて操作者を案内することになる。
【0132】
PCプロセッサにより発生され且つ始動、較正及び自己診断機能についてユーザに表示されるサンプルスクリーンは、図14乃至図17に図示されている。これら図面を参照すると、最初の始動装置が図14に図示されている。このスクリーンは、全ての機能が適正に作用しているかどうかを確認するため装置が内部の診断チェックを行っている間、見える状態を保つ。次に、この装置は、設定及び較正を自動的に開始する。図15のスクリーンは、注射器ラムが後方位置まで動くときに現れ、その後、操作者に対し注射器組立体を装填する方法を教える図16のスクリーンが現れる。注射器の装填手順が完了すると、操作者は、図16のタッチスクリーンの「完了」パッドを押す。これで、装置は、「設定」手順を開始する用意が整い、注射器ラムがその前方位置まで動く間に、図17のスクリーンを表示する。
【0133】
「設定」命令は、図18のスクリーンによって開始する。この図を参照すると、操作者には、装置のチューブ組立体部分を装填するステップバイステップの方法が命令される。操作者は、図18に示したステップを完了すると、「完了」スイッチを押してタッチスクリーンを作動させ、図19のスクリーンに表示されたステップへと進む。図19のスクリーンは、圧力ドーム、マニホルド及び流体管の洗滌作業を含む。これらのステップが完了し、また、「完了」スイッチが作動されると、図20の設定命令スクリーンが表示される。スクリーン20は、装置の圧力変換器及びポンプ組立体を取り付ける命令を発する。図20のスクリーンの項目及び「完了」スイッチの作動が完了すると、図21のスクリーンの設定命令が表示される。図21のステップは、設定命令を完了し、また、操作者が図21のスクリーンの「完了」スイッチを作動させると、装置は、注射器を充填する用意が整う。図18乃至図21のスクリーンに表示した全ての設定ステップの間、操作者は、スクリーンの「戻る」スイッチ領域を押すことにより、以前のスクリーンに戻るオプションが可能である。
【0134】
装置が注射器の充填を行う前に、設定命令を完了したならば、操作者は、図22のスクリーンの「OK」スイッチを作動させなければならない。この「OK」スイッチを作動させると、装置は、自動的な充填及びパージング工程に進む。注射器の位置を注射器の後部まで引き戻して、コントラスト物質を注射器内に吸引するならば、図23のスクリーンが表示されよう。次に、ピストンが方向を逆にし、前方に動き始めると、注射器の上方ポートから空気が排除され、その間、図24のスクリーンが表示されよう。この注射器のピストンは、患者のマニホルド内の下方弁が動く前に、自動的に停止する。注射器のパージ作業後、図25のスクリーンが表示されて、注射器の下方ポートから装置の高圧管への管のパージングを進める方法について操作者に命令を与える。管をパージするためには、操作者は、図25のスクリーンの「パージ」スイッチを押し且つ保持し、また、空気及び泡が注射器と患者のマニホルドとの間の管から、また、患者のマニホルドの先端/突端から高圧管内に押し出されるとき、そのパージング作業を眼で観察しなければならない。この手順が完了すると、操作者は、「パージ」スイッチを放し、図25のスクリーンの「完了」スイッチを作動させる。操作者が「パージ」スイッチに触れている間、図26のスクリーンが現れよう。操作者が「パージ」スイッチとの接触を放すと、図25のスクリーンが再度、現れよう。図25の「完了」スイッチを作動させた後、図27のディスプレイスクリーンが表示されよう。
【0135】
図27のプロセスステップは、最終的な塩水洗滌方法に関するものである。操作者が図27のスクリーンの「洗滌」スイッチに触れると、装置は、塩水バッグから停止コックまでの管を洗滌し、その管内に気泡が全く存在しないことを確実にする。操作者が図27のスクリーンの「洗滌」スイッチに触れている限り、図28のスクリーンが表示されよう。最終的な塩水洗滌手順が完了すると、操作者は、「洗滌」スイッチを放し、図27のスクリーンの「完了」スイッチに触れ、これによって、図29のディスプレイスクリーンが表示される。図29のスクリーンは、最終的な設定スクリーンである。図29のスクリーンの命令を完了した後、操作者は、ディスプレイの「完了」スイッチを作動させ、設定手順を完了し、これで、装置は、カテーテルへ接続する用意が整う。
【0136】
上述した設定手順が成功裡に完了したならば、この装置は、全体として、図30に図示したメインスクリーンを表示する。その好ましい実施の形態の制御盤のメインディスプレイスクリーンは、図30に図示する部分に分割されている。ディスプレイスクリーンに対する全てのフォーマットは、PCマイクロプロセッサ410により且つその制御の下で提供される。図30を参照すると、スクリーンの右側に沿って垂直に整合され且つ「注射」(500);「塩水」(501);「吸引」(502);「パージ」(503)と表示された4つの「ファンクションキー」がある。これら4つのソフトなファンクションキーに対するアイコンは、タッチスクリーン432の適当なスイッチパッドと整合されており、このため、操作者は、ファンクションキーの選択した1つを押し且つその選択した機能に対する状況ウィンドウを現わす。この状況ウィンドウは、参照番号505で表示されており、インジケータウィンドウは、参照番号506で表示されている。状況ウィンドウは、装置のメッセージを表示し且つユーザに対し装置の作動状況に関するフィードバックを提供するために使用される。この状況インジケータウィンドウ506は、作動可能であるとき、重要な装置のセンサを表示する。
【0137】
LCA(左冠状動脈)508、RCA(右冠状動脈)509及びLV/Ao(左心室/大動脈)510として表示された「注射型式」又は「注射選択」キーは、ファンクションキーの上方に配置されて、行われるであろう注射手順の型式に関する操作者入力を提供する。この注射型式は、これら3つの型式の釦の1つを押すだけで変更することができる。新しい型式が選択されたならば、その選択した型式に対する注射不能パラメータの値が計算され且つパラメータキーに表示される。好ましい実施の形態において(以下に、より詳細に説明するように)、注射パラメータは、治療すべき患者の体重のような実際の値に基づいて計算される。選択した注射キーの文字による表示がディスプレイスクリーンの極く頂部に表示される。図30に図示したサンプルスクリーンにおいて、LCAキーが選択され且つ「左冠状」という関係した表示がスクリーンの頂部に表示される。
【0138】
次のパラメータ、すなわち、流量、注射量、注射圧力及び「立上り時間」は、注射状況ウィンドウが開いている間、又は設定手順中、所望のパラメータのアイコン押すことにより変更することができる。注射パラメータ/制限キーは、ディスプレイスクリーンの頂部に沿って配置されている。
【0139】
「流量」ウィンドウ512は、手動遠隔制御装置を完全に押した時に得ることのできる最大の流量を表示する。流量の単位はml/secである。「注射量」パネル513は、1回の注射にて注射することのできる全量限界値を表示する。このパラメータの単位はmlである。「注射圧力」ウィンドウ512は、1回の注射中に許容される注射器内の最高圧力を表示する。この圧力に達したならば、警報ランプが点灯し、注射流量は表示された圧力に制限される。圧力の単位はpsiである。「立上り時間」ウィンドウ515は、1回の注射中に許容される最大の立上り時間を表示する。この立上り時間の単位はsecである。
【0140】
この装置は、1997年10月7日付けで出願された、「自動的高/低圧力切換え機能を有する血管造影用注射装置(Angiographic Injector System with Automatic High/Low Pressure Switching)」という名称の、同時出願係属中の特許出願第08/946,293号に記載されたような、注射器を自動的に又は手動で再充填する特徴的な機能を備えている。「再充填」キーは、ディスプレイスクリーン最下方部分に配置され、ディスプレイスクリーンの「オプション」部分を含んでいる。全体として参照番号517で表示した再充填キーは、所望のアイコンを押すだけでその場合又はその手順中任意の時点にて再設定することができる。
【0141】
全体として「流量型」キーとして表示された第二のオプションキーは参照番号518で示してあり、遠隔の手動制御装置14´によりリアルタイムにて制御することのできる「一定」量又は「可変」量の何れかとして注射手順を選択することを可能にする。
【0142】
プロセッサは、注射過程中に存在する瞬間的な状態に関するリアルタイムの情報をユーザに提供する。これらの状態は、図31のサンプルスクリーン上に表示したように、状況ウィンドウ505に表示される。また、このディスプレイパネルは、「最後の注射」ウィンドウ520にて、最後の注射の結果も表示する。最後の注射の結果は、最後に行った注射の「総量」及び「最大流量」を含む。また、このディスプレイパネルは、「コントラスト物質の総量」ディスプレイウィンドウ522に表示された、現在の場合に患者に注射したコントラスト物質の合計量をも示す。最後の注射及びコントラスト物質の総量ディスプレイウィンドウは、ディスプレイスクリーンの下左側部分付近に配置されている。コントラスト物質の総量ディスプレイは、その場合の過程は、注射器の多くの充填手順を含むため、注射過程中に瞬間的に利用可能となる重要な情報を提供する。更に、かかる充填手順は、注射器の充填の総量又はその一部分の量の何れかを現わすこともできる。従来の技術は、連続的な注射コースに亙って患者に投与されたコントラスト物質の総量の日誌を操作者/ユーザが記録することに基づくものであった。注射したコントラスト物質の量の合計量を正確に記録しそこなったならば、患者に対し過剰な投与量の材料が注射される可能性がある。
【0143】
好ましい実施の形態において、「患者の体重」として表示されたディスプレイウィンドウ/キーは、参照番号524にて示してある。好ましい実施の形態において、このディスプレイウィンドウは、現在の患者の体重を表示する。このキーを選択することで、ユーザは、患者の体重をkg単位にて装置に入力することができる。注射量の値及び限界値を計算するために患者の体重が使用される(以下に、より詳細に説明)。
【0144】
ディスプレイパネルにおける最後のキーは、ディスプレイパネルの右下部分付近に配置された「ケース終了」キー526である。このキーを操作するならば、装置を停止させる前、又は新たなケースを開始する前に、ユーザが適正なステップを行うように指令が表示される。
【0145】
非常釦又はスイッチ434(図11)は、制御盤の右上部分に物理的に配置されている。これは、ディスプレイスクリーン上に配置されていない唯一のファンクションスイッチである(電源スイッチ以外)。非常スイッチは、続行中の全ての機能を不作動にし且つ非常釦を押した旨のメッセージを状況ウィンドウに表示する。非常用釦又はスイッチは、交互動作型スイッチである。押したとき、釦は点灯する。スイッチを切るためには、ユーザは、再度、釦を押さなければならない。
【0146】
所望のパラメータのキー(512乃至515)を押すことにより、注射限界量を変更することができる。注射(キー518)が「定」モードに設定されたならば、状況ウィンドウ内にてユーザにキーパッドが呈示されよう。この状態は、図32に図示されている。次に、新たな値を入力することができる。プロセッサは、選択した注射型式に対して許容可能な範囲内にあるかどうかを確認するため、この新たな値をチェックする。その入力値が許容可能な範囲外であるならば、この旨をユーザに知らせるメッセージが表示されよう。「キャンセル」キーを押したならば、その以前に設定した値はその設定した状態を保つ。注射オプション(キー518)を「可変」モードに設定したならば、ユーザが選択し得るように、状況ウィンドウには、選択すべき6つの異なる値が表示される。この状況に対応するサンプルのディスプレイウィンドウが図33に図示されている。「キャンセル」キーを押した場合、それ以前に設定された値は、その設定した状態を保つ。
【0147】
「注射」釦又はキー500を押すことにより、注射が開始される。LA/Ao(多量注射釦)を選択したならば、ユーザには、これを確認するため質問される。LA/Ao注射手順がコントラスト物質の最大の使用量を表す一方、RCA注射手順は、最小量のコントラスト物質を使用する。次に、ユーザには、注射の「準備」OKであるかどうかがディスプレイ上のプロンプトにより質問が為される。ユーザは、状況ウィンドウ内の「OK」スイッチを押さなければならない。この時点にて、必要とされる注射を行うのに十分なコントラスト物質が注射器内にないならば、装置は、再充填を行うように指令することになる。この再充填は、「再充填」オプションキー517の状況に依存して、自動式又は手動式とする。量のレベルが正確であるならば、ユーザは、注射手順を開始するため、手動制御装置14´を作動させるように指令されよう。
【0148】
注射した量が限界値の10%以下であるならば、注射回数は増やさず、手動制御装置は、準備状態に保つ。「多量」注射は、再度の注射が許容される前に、ユーザは再度、「多量OK」釦を押さなければならない。ユーザは、スクリーン上の任意の釦を押すことにより、注射機能から出る。
【0149】
「塩水」キー501を押すことにより開始させた塩水洗滌機能は、塩水を塩水バッグから吸引し、使い捨て器具及び管接続部を洗滌する。この機能が開始されると、「塩水洗滌」状況ウィンドウが「洗滌」キー及び「完了」キーによって表示される。「洗滌」キーを押すと、10秒以内又はユーザがキーを押すのを止める迄、使い捨て器具を塩水にて洗滌する。このウィンドウ内の「完了」釦を押すと、洗滌過程は終了し、ユーザは、「メイン」スクリーンに戻る。
【0150】
吸引機能は、流体をカテーテルから使い捨て器具を通じて廃物バッグ内に吸引する。この機能は、管内にて検知された気泡を除去するために使用することができる。この吸引機能は、ディスプレイパネル上の「吸引」釦又はキー502を選択することにより開始する。スクリーン上に「吸引」状況ウィンドウは表示されよう。「吸引」キーを押すと、その「吸引」キーが押されている限り、10秒以内に、管の流体を使い捨て型器具を通じて廃物バッグ内に吸引することになる。「完了」釦を押すと、ユーザは、「メイン」スクリーンに戻る。
【0151】
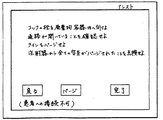
使い捨て器具から気泡をフラッシングするため、手動のパージ機能が使用される。パージングするとき、注射器のパージ、及び管のパージという2つの選択が可能である。注射器のパージは、注射器から空気を排除することを含み、空気が注射器から排除され且つ流体が注射器を押して逆止弁を閉じ状態にするときに停止する。管のパージは、空気を注射器から患者のマニホルドを通って停止コックまで排除する。この方法は、コントラスト物質を使い捨て器具を通して送り、また、気泡の検知装置を非係合状態にさせる。このパージは、注射器と患者のマニホルドとの接続部、及び患者のマニホルド弁の正面から空気を排出し得るように、装置の始動時に行われる。この手順中、吸引器のフラッシング手順が試みられた後、気泡が使い捨て器具内に残るとき、管のパージを行うこともできる。「パージ」機能を作動させるためには、「パージ」キー503を「メイン」スクリーンから選択する。「パージ」状況ウィンドウが表示される。「注射器」、「キャンセル」、「管」という3つのオプションがスクリーン上に表示される。「キャンセル」を選択すると、「メイン」スクリーンに戻る。「管」を選択すると、ユーザには、患者を切り離すように警告が為される。ユーザは、「オーケー」キーを押すことにより、これを確認しなければならない。この時点にて、「注射器」を選択したならば、「パージ」キー及び「完了」キーがウィンドウに表示される。「パージ」キーは、押し・保持キーであり、このキーは、ユーザがキーを放す迄、10秒以内、管又は注射器を通じてパージングを開始し且つ続行する。空気が完全に排除され且つコントラスト物質の弁がうまく閉じたならば、パージングは自動的に停止されよう。弁が閉じる前に、ユーザがパージングを停止させると、パージングは完全でない旨のメッセージが表示されよう。スクリーン上の「完了」キー又は任意の他のキーを押すと、パージング機能から出る。手動のパージング機能のサンプルスクリーンは、図34に図示されている。
【0152】
キー517により自動的な再充填オプションが選択されたならば、注射器は、所望の注射限界量に対して十分なコントラスト物質が注射器内に存在しないならば、自動的に110mlまで再充填する。このことは、注射時、自動的に行われる。手動の再充填が選択されたならば、「再充填」状況ウィンドウが表示されよう。「パージ」キー、「完了」キー及び「再充填」キーがこのウィンドウ内で作用可能である。「再充填」キーを押し且つその押した状態を保つと、プランジャを後方に引き込んで、注射器を充填する。注射器内の現在のコントラスト物質の量は、充填するに伴って表示される。「再充填」釦を放すと、再充填作用が中断する。「パージ」キーを押すと、その「パージ」キーが押されている限り、空気及び流体が注射器外に排除される。「完了」釦を押すと、ユーザは「メイン」スクリーンに戻る。依然として、注射限界量を満足させるのに十分なコントラスト物質が注射器内にないならば、「再充填」状況ウィンドウが注射の時点で再度、開放する。手動の再充填操作のサンプルスクリーンは図35に図示されている。
【0153】
そのケースを終了させるには、「ケース終了」釦526を押す。「キャンセル」キー及び「終了」キーが状況ボックス内に表示される。「キャンセル」キーを選択すると、ユーザは「メイン」スクリーンに戻る。「終了」キーを選択すると、ケース終了順序が開始する。高圧管が切り離され、コントラスト物質容器が受け具から除去されると、「コントラスト物質無し」インジケータが現れよう。次に、「完了」釦を押し又は選択すると、プランジャは注射器本体から自動的に引き出され、チャンバを非係止状態にし且つ開放することにより、注射器を装置から除去することができる。
【0154】
従来の装置は、治療すべき患者の値又は特徴に直接的に関係した注射不能パラメータを自動的に測定することができない。かかる特徴は、体重、年齢、個人の健康状態、血管の丈夫さ、カテーテルの寸法等のような事項を含むと考えられる。例えば、従来の装置は、外科医が特定の患者に対し記憶させることのできる保存した注射パラメータの値を呼出し又は保存したパラメータが外科医が典型的に選択する注射パラメータを表す特定の手順を呼出す記憶呼出し機能を備えている。本発明は、注射手順の直前に、この注射パラメータの値は治療すべき患者の値又は状態に直接的に関係する、示唆された注射不能パラメータの値を測定する自動的な方法を提供する。この方法の好ましい実施の形態において、注射不能パラメータの値は患者の「体重」を使用して計算する。しかしながら、上述したように、その他の患者に特有のファクタを使用して注射不能の値の計算を行ってもよい。患者の体重に基づいて注射不能パラメータを測定する1つの好ましい実施の形態の場合、装置により行うことのできる3つの異なる型式(すなわち、LCA、RCA又はLV/Ao)の注射に対応する3つの異なる組みの等式又はアルゴリズムが使用される。LCA(左冠状血管処置法)の場合、4つの注射不能パラメータの値を決定するために使用される等式は、次の通りである。
【0155】
LCA流量限界値=3.5Ln(体重)−7.6 等式1
LCA量限界値=5.17Ln(体重)−11 等式2
LCA立上り時間=(流量+10)/100 等式3
LCA圧力限界値=(流量+20)25 等式4
表1には、選択された患者の体重に対して等式1乃至4により決定された注射不能パラメータの計算値が掲げてある。

RCA流量限界値=2.1Ln(体重)−4.8 等式5
RCA量限界値=2.7Ln(体重)−6 等式6
RCA立上り時間=(流量+10)/100 等式7
RCA圧力限界値=(流量+15)25 等式8
表2には、選択された患者の体重に対して等式5乃至8により決定された4つの注射不能パラメータの計算値が掲げてある。
LV/Ao流量限界値=7Ln(体重)−16 等式9
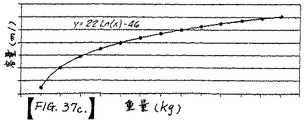
LV/Ao量限界値=22Ln(体重)−46 等式10
LV/Ao立上り時間=(流量+10)/100 等式11
LV/Ao圧力限界値=60(流量)+200 等式12
表3には、選択された患者の体重に対して等式9乃至12により決定された注射不能パラメータの計算値が掲げてある。
【0156】
図37には、体重が10乃至130kgの患者に対する左冠状血管、右冠状血管及び左心室/大動脈の機能について、それぞれ等式2、6、10により計算した限界量の注射不能パラメータ値の比較グラフが示してある。
【0157】
患者に特有の特徴(体重のような)に基づいて注射不能パラメータ値を自動的に決定することは、1人の特定の患者に対する適正な注射不能パラメータを選択することに伴う推定因子を最小にし、注射手順の間における患者の状態の変化に対応する注射不能パラメータを決定する方法を提供し、また、注射手順を監視する外科医又は操作者が適正な注射不能パラメータの値を選択し又は決定するためにさもなければ頼らなければならないであろう補助的な図表を不要にするものである。
【0158】
従って、特定の注射手順に対する一組みの注射不能パラメータ値を決定するためには、ユーザは、選択釦508乃至510により提供された3つの注射セレクタの1つを選択して、患者の体重ウィンドウ524にて患者の体重をkg単位で入力するだけでよい。この過程のフローチャートは、図38に図示されている。図38を参照すると、行うべき注射型式の最初の選択(ブロック530)を含む最初の設定過程後、操作者は、患者の体重を入力する(ブロック531)。マイクロプロセッサは、選択された注射手順(すなわち、LCA、RCA又はLV/Ao)及びディスプレイパネルを介して装置に入力した患者の体重に従って適当なアルゴリズムを使用することにより注射不能パラメータを自動的に決定する(ブロック532)。次に、その計算した注射不能パラメータ値をメインスクリーン上に表示し(ブロック533)、その過程を完了する。操作者は、決定された値を変更するオプションを有するが、殆どの適用例において、その注射不能値を変更する必要はないであろう。
【0159】
以上、本発明の好ましい実施の形態及び適用例について説明したが、上記の説明を参照することにより、当業者により、本明細書に開示し又は記載しなかったその他の改変例が案出されよう。この説明は、本発明及びその作用原理を明確に開示する好ましい実施の形態、構造体、方法、アルゴリズム及び適用例の特定例を提供することを目的とするものである。従って、本発明は、任意の特別な実施の形態又はその構成部品にのみ限定されるものではない。特許請求の範囲の精神及び広い範囲に属する本発明の全ての代替例、改変例及び変更例が包含される。
【0160】
図面を参照すると、幾つかの図面の全体に亙って同様の部品は同様の参照番号で表示してある。
【図面の簡単な説明】
【図1】 本発明の血管造影用注射装置の好ましい実施の形態を示す斜視図である。
【図2】 2Aは、図1の装置の作動状態を示す線図である。
2Bは、図1と異なる作動状態を示す線図である。
2Cは、図1と異なる作動状態を示す線図である。
2Dは、図1と異なる作動状態を示す線図である。
2Eは、図1と異なる作動状態を示す線図である。
2Fは、図1と異なる作動状態を示す線図である。
2Gは、図1と異なる作動状態を示す線図である。
【図3】 図1の注射装置の制御装置の電気的ブロック図である。
【図4】 本発明の注射装置の好ましい実施の形態の正面制御盤の制御装置及びディスプレイの図である。
【図5】 5Aは、図1の装置の遠隔制御装置の側面図である。
5Bは、図1の装置の遠隔制御装置の部分平面斜視図である。
【図6】 足踏み操作型遠隔制御装置の斜視図である。
【図7】 7Aは、コントラスト物質充填中の入口逆止弁及びマニホルドの作動状態を示す図である。
7Bは、空気パージ中の入口逆止弁及びマニホルドの作動状態を示す図である。
7Cは、患者への注射操作中の入口逆止弁及びマニホルドの作動状態を示す図である。
7Dは、図7Cと異なる患者の注射操作中の入口逆止弁及びマニホルドの作動状態を示す図である。
【図8】 8Aは、入口逆止弁の作動状態の詳細を示す図である。
8Bは、入口逆止弁の作動状態の詳細を示す図である。
8Cは、入口逆止弁の作動状態の詳細を示す図である。
【図9】 9Aは、本発明の血管造影用注射装置の第二の実施の形態を示す斜視図である。
9Bは、図9Aと異なる形態を示す斜視図である。
【図10】 図9に図示した装置の部分の取り付け形態を示す機械的ブロック図である。
【図11】 11Aは、図9及び図10の制御装置及び電気的機能の電気的ブロック図である。
11Bは、図11Aと異なる機能を示す制御装置及び電気的機能の電気的ブロック図である。
11Cは、図11Aと異なる機能を示す制御装置及び電気的機能の電気的ブロック図である。
11Dは、図11Aと異なる機能を示す制御装置及び電気的機能の電気的ブロック図である。
【図12】 図11の制御装置の注射装置におけるモータ制御部分の電気的ブロック図である。
【図13】 図11の制御装置の蠕動ポンプにおけるモータ制御部分と関係した安全回路の電気的ブロック図である。
【図14】 図11の装置のディスプレイのパワーアップスクリーンの図である。
【図15】 図11の装置のディスプレイの後方較正スクリーンの図である。
【図16】 図11の装置のディスプレイのチェックスクリーンの図である。
【図17】 図11の装置のディスプレイの前方較正スクリーンの図である。
【図18】 図11の装置のディスプレイの第一の始動命令スクリーンの図である。
【図19】 図11の装置のディスプレイの第二の始動命令スクリーンの図である。
【図20】 図11の装置のディスプレイの第三の始動命令スクリーンの図である。
【図21】 図11の装置のディスプレイの第四の始動命令スクリーンの図である。
【図22】 図11の装置のディスプレイの注射器充填準備完了スクリーンの図である。
【図23】 図11の装置のディスプレイの注射器充填通知スクリーンの図である。
【図24】 図11の装置のディスプレイのパージング通知スクリーンの図である。
【図25】 図11の装置のディスプレイの管パージ命令スクリーンの図である。
【図26】 図11の装置のディスプレイの管パージング通知スクリーンの図である。
【図27】 図11の装置のディスプレイの最終的な塩水洗滌命令スクリーンの図である。
【図28】 図11の装置のディスプレイの塩水洗滌通知スクリーンの図である。
【図29】 図11の装置のディスプレイの最終的な始動スクリーンの図である。
【図30】 図11の装置の主ディスプレイスクリーンの図である。
【図31】 注射モードにおける装置を示す、図30の主ディスプレイスクリーンの図である。
【図32】 一定量作動モードが選択されたときに表示されるキーパットを示す、図30の主ディスプレイスクリーンの図である。
【図33】 可変量作動モードが選択されたときに表示されるキーパットを示す、図30の主ディスプレイスクリーンの図である。
【図34】 手動パージングモードにおける作動状態を示す、図30の主ディスプレイスクリーンの図である。
【図35】 手動再充填モードにおける作動を示す、図30の主ディスプレイスクリーンの図である。
【図36】 36Aは、患者の体重に関して本発明のアルゴリズムにより決定された流量限界値に対する注射不能パラメータ値の比較グラフである。
36Bは、図36Aと同様の比較グラフである。
36Cは、図36Aと同様の比較グラフである。
【図37】 37Aは、患者の体重に関して本発明のアルゴリズムにより決定された量限界値に対する注射不能パラメータ値の比較グラフである。
37Bは、図37Aと同様の比較グラフである。
37Cは、図37Aと同様の比較グラフである。
【図38】 図36及び図37の患者に関係した注射不能パラメータを決定するために使用される方法を示す概略図的なフローチャートである。
Claims (15)
- 医療流体を患者の体内に注射する装置と当該装置と作用可能に接続された駆動手段(460,461)とを備えた血管造影液注射装置(10)において、
ユーザーインターフェースを作動させるように最適化され且つユーザーからの1以上の流体注射設定を受け取るような構造とされた第一のプロセッサ(410)と、
前記第一のプロセッサから1以上の注射を行うという命令を受け取り且つ当該命令を実行するために前記駆動手段に向けて制御信号を発する構造とされた第二のプロセッサ(412)とを備え、
前記第一及び第二のプロセッサ(410,412)が、各々、1以上の安全性パラメータについて1以上のセンサ(461d,461e,462,463,464)を監視し、前記第一及び第二のプロセッサの片方又は両方が、前記駆動手段に向けて安全制御命令を発することができるようになされている血液造影液注射装置。 - 請求項1に記載の注射装置において、
前記医療流体を患者の体内に注射する装置が、前記第一のプロセッサから所定レベルの1以上の安全性パラメータを受け取る少なくとも1つの比較回路(461a,461b,462)を更に備え、
前記比較回路は、前記1以上の安全性パラメータを監視し且つ1つの安全性パラメータが所定レベルを外れたときに前記第一及び第二のプロセッサのうちの片方又は両方に信号を付与する構造とされている、注射装置。 - 請求項1に記載の注射装置において、
前記第一のプロセッサがPCタイプのコンピュータ(410)である、注射装置。 - 請求項1に記載の注射装置において、
前記第二のプロセッサが組み込み型プロセッサである、注射装置。 - 請求項1乃至4のうちのいずれか一の項に記載の注射装置において、
前記流体注射設定が所望の注射流量である、注射装置。 - 請求項1又は2に記載の注射装置において、
前記安全性パラメータが駆動手段のトルクである、注射装置。 - 請求項1又は2に記載の注射装置において、
前記安全性パラメータが駆動手段の速度である、注射装置。 - 請求項1又は2に記載の注射装置において、
前記第一及び第二のプロセッサ(410,412)のうちの片方又は両方が、前記1以上の安全性パラメータの監視に従って、サーボ増幅器(461)を制御する構造とされている、注射装置。 - 請求項1に記載の注射装置において、
前記第一及び第二のプロセッサ(410,412)のうちの片方又は両方が、遠隔制御装置(14)から1以上の命令信号を受け取る構造とされている、注射装置。 - 請求項9に記載の注射装置において、
前記第一のプロセッサ(410)への命令信号をデジタル信号とすることができ、前記第二のプロセッサ(412)への命令信号をアナログ信号とすることができる、注射装置。 - 請求項1に記載の注射装置において、
前記1以上の流体注射設定の各々が患者の値を示す信号を含んでいる、注射装置。 - 請求項11に記載の注射装置において、
前記第一のプロセッサが、前記患者の値を示す信号を受け取り且つ患者に関連する注射パラメータを計算するようになされた、注射装置。 - 請求項12に記載の注射装置において、
前記第二のプロセッサが、前記患者に関する注射パラメータを受け取り且つ少なくとも部分的に当該注射パラメータに応答して前記駆動手段を制御するようになされた、注射装置。 - 請求項1に記載の注射装置において、
前記第一のプロセッサが第一のバスを介して種々の装置の構成要素と通信し、前記第二のプロセッサが第二のバスを介して種々の装置の構成要素と通信するようになされた、注射装置。 - 請求項14に記載の注射装置において、
前記第一及び第二のプロセッサが、前記第一及び第二のバスの各々に接続されている一組のレジスタを介して相互に通信するようになされた、注射装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/966,088 US7267666B1 (en) | 1995-04-20 | 1997-11-07 | Angiographic injector system with multiple processor redundancy |
| US08/966,088 | 1997-11-07 | ||
| PCT/US1998/023736 WO1999024095A2 (en) | 1997-11-07 | 1998-11-05 | Angiographic injector system with multiple processor redundancy |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001522660A JP2001522660A (ja) | 2001-11-20 |
| JP4270748B2 true JP4270748B2 (ja) | 2009-06-03 |
Family
ID=25510896
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000520179A Expired - Fee Related JP4270748B2 (ja) | 1997-11-07 | 1998-11-05 | 多数プロセッサの冗長性を備える血管造影用注射器装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7128729B2 (ja) |
| EP (3) | EP1607112B1 (ja) |
| JP (1) | JP4270748B2 (ja) |
| AT (3) | ATE420682T1 (ja) |
| CA (1) | CA2308418A1 (ja) |
| DE (3) | DE69831596T2 (ja) |
| ES (1) | ES2252871T3 (ja) |
| WO (1) | WO1999024095A2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101001894B (zh) * | 2004-08-04 | 2010-11-10 | 旭硝子株式会社 | 含氟弹性共聚物、其组合物及交联橡胶 |
| JP2016221350A (ja) * | 2009-07-24 | 2016-12-28 | バイエル メディカル ケア インコーポレーテッド | 多流体医療用注入器システムおよび操作方法 |
Families Citing this family (86)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU6570600A (en) | 1999-08-05 | 2001-03-05 | Map Medizin-Technologie Gmbh | Device for supplying a respiratory gas, humidifying device, respiratory gas tube, and connecting device therefor |
| US6641591B1 (en) | 1999-08-26 | 2003-11-04 | John H. Shadduck | Instruments and techniques for controlled removal of epidermal layers |
| US6626862B1 (en) * | 2000-04-04 | 2003-09-30 | Acist Medical Systems, Inc. | Fluid management and component detection system |
| DE10030620A1 (de) * | 2000-06-28 | 2002-01-17 | Karlsruhe Forschzent | Vorrichtung zur Injektion von medizinischen Präparaten unter CT-/MRT-Kontrolle |
| US7740623B2 (en) * | 2001-01-13 | 2010-06-22 | Medtronic, Inc. | Devices and methods for interstitial injection of biologic agents into tissue |
| US20040138621A1 (en) * | 2003-01-14 | 2004-07-15 | Jahns Scott E. | Devices and methods for interstitial injection of biologic agents into tissue |
| US7628780B2 (en) * | 2001-01-13 | 2009-12-08 | Medtronic, Inc. | Devices and methods for interstitial injection of biologic agents into tissue |
| US7044933B2 (en) * | 2001-03-01 | 2006-05-16 | Scimed Life Systems, Inc. | Fluid injection system for coronary intervention |
| JP3809114B2 (ja) * | 2001-11-05 | 2006-08-16 | スーガン株式会社 | 流路切替装置およびその装置に用いる造影剤注入用チューブ |
| US7597679B2 (en) * | 2002-03-27 | 2009-10-06 | Novo Nordisk A/S | Safety system for an electrically driven medical delivery device and a computer-readable medium |
| US6929619B2 (en) * | 2002-08-02 | 2005-08-16 | Liebel-Flarshiem Company | Injector |
| US9956377B2 (en) | 2002-09-20 | 2018-05-01 | Angiodynamics, Inc. | Method and apparatus for intra-aortic substance delivery to a branch vessel |
| JP4731795B2 (ja) * | 2003-02-18 | 2011-07-27 | 株式会社根本杏林堂 | 薬液注入装置 |
| EP1596905A2 (en) * | 2003-02-21 | 2005-11-23 | Smith and Nephew, Inc. | Spinal fluid introduction |
| AU2003903139A0 (en) * | 2003-06-20 | 2003-07-03 | Resmed Limited | Breathable gas apparatus with humidifier |
| CN105194774B (zh) | 2003-06-20 | 2018-06-01 | 瑞思迈有限公司 | 带有加湿器的可吸入气体设备 |
| US8491636B2 (en) | 2004-03-23 | 2013-07-23 | Medtronic Cryopath LP | Method and apparatus for inflating and deflating balloon catheters |
| US7727228B2 (en) | 2004-03-23 | 2010-06-01 | Medtronic Cryocath Lp | Method and apparatus for inflating and deflating balloon catheters |
| US9555223B2 (en) | 2004-03-23 | 2017-01-31 | Medtronic Cryocath Lp | Method and apparatus for inflating and deflating balloon catheters |
| EP1812101A4 (en) | 2004-11-16 | 2014-04-23 | Medrad Inc | MODELING PHARMACEUTICAL DISSIPATION |
| JP5232473B2 (ja) | 2004-11-24 | 2013-07-10 | メドラッド インコーポレーテッド | 注入処理中に生成される圧力をモデル化するためのシステム及び装置 |
| EP1853332B1 (en) * | 2005-02-21 | 2008-11-19 | Novo Nordisk A/S | A method for ensuring constant speed of a motor in an injection device |
| CN101115517A (zh) * | 2005-02-23 | 2008-01-30 | 诺和诺德公司 | 用于使注射设备中的活塞杆回动的方法和设备 |
| US20070060834A1 (en) * | 2005-08-23 | 2007-03-15 | Odland Rick M | Catheter control console |
| WO2007033103A1 (en) | 2005-09-14 | 2007-03-22 | Acist Medical Systems, Inc. | Medical fluid injection system |
| DE102005046784A1 (de) * | 2005-09-29 | 2007-04-05 | Siemens Ag | Verfahren und Vorrichtung zur Überprüfung von Parametern |
| CN103550836B (zh) | 2005-11-21 | 2018-02-06 | 阿西斯特医疗系统有限公司 | 医用流体注射系统 |
| US8048089B2 (en) | 2005-12-30 | 2011-11-01 | Edge Systems Corporation | Apparatus and methods for treating the skin |
| US9566088B2 (en) | 2006-03-29 | 2017-02-14 | Edge Systems Llc | Devices, systems and methods for treating the skin |
| US10172644B2 (en) | 2006-03-29 | 2019-01-08 | Edge Systems Llc | Devices, systems and methods for treating the skin |
| JPWO2008018385A1 (ja) * | 2006-08-07 | 2009-12-24 | 株式会社根本杏林堂 | X線ctシステム、薬液注入装置およびctスキャナ |
| EP1920793A1 (de) * | 2006-11-10 | 2008-05-14 | F.Hoffmann-La Roche Ag | Optische Postitionserkennung des Stopfens einer Ampulle |
| EP3376504A1 (en) | 2006-12-29 | 2018-09-19 | Bayer Healthcare, LLC | Patient-based parameter generation systems for medical injection procedures |
| US8365726B2 (en) | 2007-06-07 | 2013-02-05 | Resmed Limited | Tub for humidifier |
| EP2170165B1 (en) | 2007-07-17 | 2018-12-05 | Bayer Healthcare LLC | Systems for determination of parameters for a procedure, for estimation of cardiopulmonary function and for fluid delivery |
| JP4960180B2 (ja) * | 2007-08-31 | 2012-06-27 | 株式会社根本杏林堂 | 薬液注入装置及び薬液注入システム |
| EP2283883B1 (en) * | 2007-11-19 | 2012-07-18 | Mallinckrodt LLC | Fluid delivery system with multi-dose fluid source |
| JP5815241B2 (ja) * | 2007-11-19 | 2015-11-17 | リーベル−フラーシャイム カンパニー エルエルシー | 状態メッセージングを有するパワーインゼクタ |
| WO2009067492A1 (en) * | 2007-11-20 | 2009-05-28 | Mallinckrodt Inc. | Power injector with flow rate assessment |
| US9078961B2 (en) | 2007-11-20 | 2015-07-14 | Liebel-Flarsheim Company Llc | Power injector with ram retraction |
| ES2386917T3 (es) * | 2007-11-20 | 2012-09-05 | Mallinckrodt Llc | Inyector motorizado con retracción del empujador |
| WO2009088884A1 (en) | 2008-01-04 | 2009-07-16 | Edge Systems Corporation | Apparatus and method for treating the skin |
| US9056193B2 (en) | 2008-01-29 | 2015-06-16 | Edge Systems Llc | Apparatus and method for treating the skin |
| DE102008051163B4 (de) * | 2008-10-10 | 2014-04-24 | Fresenius Kabi Deutschland Gmbh | Vorrichtung zum Öffnen einer Leitung |
| US8812082B2 (en) * | 2008-10-30 | 2014-08-19 | Acist Medical Systems, Inc. | Automatically supplying a pressurizing unit of a medical injection device with fluid |
| US9421330B2 (en) | 2008-11-03 | 2016-08-23 | Bayer Healthcare Llc | Mitigation of contrast-induced nephropathy |
| JP2012510315A (ja) * | 2008-11-28 | 2012-05-10 | マリンクロッド エルエルシー | 医療用流体送達システムのためのワークフローにより駆動されるユーザインターフェース |
| US8343098B2 (en) | 2009-06-29 | 2013-01-01 | Acist Medical Systems, Inc. | Method and system for removing air from a flow path of a fluid injection device |
| EP2451367B1 (en) | 2009-07-08 | 2020-01-22 | Edge Systems Corporation | Devices for treating the skin using time-release substances |
| CA2736841C (en) | 2010-04-15 | 2014-02-18 | Teneo Innovations Inc. | Device and electronic controller for syringe piston control |
| US8612055B2 (en) * | 2010-04-16 | 2013-12-17 | Medtronic, Inc. | System and method for delivering a therapeutic agent according to default infusion schedule |
| WO2011163578A2 (en) | 2010-06-24 | 2011-12-29 | Medrad, Inc. | Modeling of pharmaceutical propagation and parameter generation for injection protocols |
| US9940440B2 (en) | 2011-04-28 | 2018-04-10 | Medtronic, Inc. | Detecting and responding to software and hardware anomalies in a fluid delivery system |
| WO2013043881A1 (en) | 2011-09-21 | 2013-03-28 | Medrad. Inc. | Continuous multi-fluid pump device, drive and actuating system and method |
| US9949704B2 (en) | 2012-05-14 | 2018-04-24 | Bayer Healthcare Llc | Systems and methods for determination of pharmaceutical fluid injection protocols based on x-ray tube voltage |
| EP2854649B1 (en) | 2012-05-25 | 2018-07-11 | Acist Medical Systems, Inc. | Fluid flow measurement systems and methods |
| EP2897673B1 (en) | 2012-09-24 | 2020-01-22 | Medline Industries, Inc. | Power injector device and method of use |
| US8915399B1 (en) | 2012-11-06 | 2014-12-23 | Acist Medical Systems, Inc. | Simulated contrast injection medium |
| US11369739B2 (en) | 2013-01-21 | 2022-06-28 | Medline Industries, Lp | Method to provide injection system parameters for injecting fluid into patient |
| US9555379B2 (en) | 2013-03-13 | 2017-01-31 | Bayer Healthcare Llc | Fluid path set with turbulent mixing chamber, backflow compensator |
| US10238812B2 (en) | 2013-03-15 | 2019-03-26 | Edge Systems Llc | Skin treatment systems and methods using needles |
| EP3437575B1 (en) | 2013-03-15 | 2021-04-21 | Edge Systems LLC | Devices and systems for treating the skin |
| EP4324414A2 (en) | 2014-12-23 | 2024-02-21 | HydraFacial LLC | Devices and methods for treating the skin using a rollerball or a wicking member |
| US10179229B2 (en) | 2014-12-23 | 2019-01-15 | Edge Systems Llc | Devices and methods for treating the skin using a porous member |
| EP3242649A4 (en) | 2015-01-09 | 2019-01-09 | Bayer Healthcare LLC | MULTIPLE FLUID DISPENSING SYSTEM WITH MULTI-PURPOSE DISPOSABLE ASSEMBLY AND CHARACTERISTICS OF THE SAME |
| US10108269B2 (en) | 2015-03-06 | 2018-10-23 | Align Technology, Inc. | Intraoral scanner with touch sensitive input |
| JP2018527052A (ja) | 2015-07-08 | 2018-09-20 | エッジ システムズ エルエルシー | 育毛を促進するための装置、システムおよび方法 |
| DE202016100531U1 (de) | 2016-02-03 | 2016-02-22 | H & B Electronic Gmbh & Co. Kg | Injektionsvorrichtung |
| WO2017152036A1 (en) | 2016-03-03 | 2017-09-08 | Bayer Healthcare Llc | System and method for improved fluid delivery in multi-fluid injector systems |
| CA2981018A1 (en) * | 2016-11-18 | 2018-05-18 | Becton, Dickinson And Company | Use of infrared light absorption for vein finding and patient identification |
| EP3378403A1 (en) * | 2017-03-20 | 2018-09-26 | Koninklijke Philips N.V. | Contrast injection imaging |
| TWM552818U (zh) * | 2017-07-11 | 2017-12-11 | 益寵生醫股份有限公司 | 醫療注射抽吸裝置 |
| WO2019046299A1 (en) | 2017-08-31 | 2019-03-07 | Bayer Healthcare Llc | FLUID PATH IMPEDANCE ASSESSMENT FOR IMPROVING FLUID DISTRIBUTION PERFORMANCE |
| CA3067740A1 (en) | 2017-08-31 | 2019-03-07 | Bayer Healthcare Llc | Method for drive member position and fluid injection system mechanical calibration |
| US11598664B2 (en) | 2017-08-31 | 2023-03-07 | Bayer Healthcare Llc | Injector pressure calibration system and method |
| CN110869071B (zh) | 2017-08-31 | 2023-05-02 | 拜耳医药保健有限公司 | 流体注入器系统中的动态压力控制的方法 |
| CN110809482B (zh) | 2017-08-31 | 2023-03-07 | 拜耳医药保健有限公司 | 流体注入器系统体积补偿系统和方法 |
| EP3797399A1 (en) | 2018-05-23 | 2021-03-31 | ACIST Medical Systems, Inc. | Flow measurement using image data |
| US11679205B2 (en) | 2018-07-13 | 2023-06-20 | Zyno Medical Llc | High precision syringe with removable pump unit |
| WO2020021060A1 (en) * | 2018-07-27 | 2020-01-30 | CSL Behring Lengnau AG | Infusion device having a syringe plunger control comprising a joystick |
| US11698059B2 (en) | 2018-12-29 | 2023-07-11 | Biosense Webster (Israel) Ltd. | Disposable dual-action reciprocating pump assembly |
| US11730882B2 (en) * | 2018-12-29 | 2023-08-22 | Biosense Webster (Israel) Ltd. | Dual-action irrigation pump with variable speed to provide constant fluid flow |
| EP4117754A4 (en) * | 2020-03-10 | 2024-03-27 | Zyno Medical Llc | HIGH PRECISION SYRINGE WITH REMOVABLE PUMP UNIT |
| US11633534B2 (en) * | 2020-08-18 | 2023-04-25 | Acist Medical Systems, Inc. | Angiogram injections using electrocardiographic synchronization |
| EP4240972A1 (en) * | 2020-11-09 | 2023-09-13 | Hydrocision, Inc. | System, apparatus, and method for a pump motor failsafe |
| USD1016615S1 (en) | 2021-09-10 | 2024-03-05 | Hydrafacial Llc | Container for a skin treatment device |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4624661A (en) * | 1982-11-16 | 1986-11-25 | Surgidev Corp. | Drug dispensing system |
| US4854324A (en) | 1984-01-31 | 1989-08-08 | Medrad, Inc. | Processor-controlled angiographic injector device |
| US4812724A (en) | 1984-11-13 | 1989-03-14 | Liebel-Flarsheim Corporation | Injector control |
| US4908017A (en) * | 1985-05-14 | 1990-03-13 | Ivion Corporation | Failsafe apparatus and method for effecting syringe drive |
| DE3905350A1 (de) * | 1989-02-22 | 1990-09-06 | Braun Melsungen Ag | Medizintechnisches geraet mit redundant aufgebauter steuereinheit zur infusionstherapie oder blutbehandlung |
| US5383858B1 (en) | 1992-08-17 | 1996-10-29 | Medrad Inc | Front-loading medical injector and syringe for use therewith |
| US5254101A (en) | 1992-11-27 | 1993-10-19 | Medrad, Inc. | Fluid presence indicator for rotatable syringe |
| US5515851A (en) | 1993-07-30 | 1996-05-14 | Goldstein; James A. | Angiographic fluid control system |
| US5569181A (en) | 1993-10-28 | 1996-10-29 | Medrad, Inc. | Sterility assurance for contrast delivery system |
| EP0650738B1 (en) | 1993-10-28 | 2003-05-02 | Medrad, Inc. | Multi-patient fluid dispensing |
| EP1258262A3 (en) | 1993-10-28 | 2002-12-18 | Medrad, Inc. | Total system for contrast delivery |
| US5494036A (en) | 1993-11-26 | 1996-02-27 | Medrad, Inc. | Patient infusion system for use with MRI |
| EP0692766B1 (en) | 1994-07-12 | 2002-05-08 | Medrad, Inc. | Closed loop information path for medical fluid delivery systems |
| US5840026A (en) * | 1994-09-21 | 1998-11-24 | Medrad, Inc. | Patient specific dosing contrast delivery systems and methods |
| US6397098B1 (en) | 1994-09-21 | 2002-05-28 | Medrad, Inc. | Data communication and control for medical imaging systems |
| US5685844A (en) * | 1995-01-06 | 1997-11-11 | Abbott Laboratories | Medicinal fluid pump having multiple stored protocols |
| EP1380261B1 (en) * | 1995-04-20 | 2008-03-05 | ACIST Medical Systems, Inc. | Radiographic contrast material injector |
| US5947935A (en) | 1996-11-12 | 1999-09-07 | Medrad, Inc. | Syringes, syringe plungers and injector systems |
| US5873861A (en) | 1996-11-12 | 1999-02-23 | Medrad, Inc. | Plunger systems |
| US5916197A (en) | 1997-02-14 | 1999-06-29 | Medrad, Inc. | Injection system, pump system for use therein and method of use of pumping system |
| US5808203A (en) | 1997-05-12 | 1998-09-15 | Medrad, Inc. | Fluid pressure measurement devices |
| US6096011A (en) | 1998-01-29 | 2000-08-01 | Medrad, Inc. | Aseptic connector and fluid delivery system using such an aseptic connector |
| US6743202B2 (en) | 1998-06-15 | 2004-06-01 | Medrad, Inc. | Encoding of syringe information |
| US6317623B1 (en) | 1999-03-12 | 2001-11-13 | Medrad, Inc. | Apparatus and method for controlling contrast enhanced imaging procedures |
| US6339718B1 (en) | 1999-07-30 | 2002-01-15 | Medrad, Inc. | Programmable injector control |
| US6673033B1 (en) | 1999-11-24 | 2004-01-06 | Medrad, Inc. | Injectors, injector systems and injector control |
| US6520930B2 (en) | 1999-11-24 | 2003-02-18 | Medrad, Inc. | Injectors, injector systems and injector control |
| WO2001041835A2 (en) | 1999-12-07 | 2001-06-14 | Medrad, Inc. | Syringes, syringe tubing and fluid transfer systems |
| US6652489B2 (en) | 2000-02-07 | 2003-11-25 | Medrad, Inc. | Front-loading medical injector and syringes, syringe interfaces, syringe adapters and syringe plungers for use therewith |
| US6471674B1 (en) | 2000-04-21 | 2002-10-29 | Medrad, Inc. | Fluid delivery systems, injector systems and methods of fluid delivery |
| US7902397B2 (en) | 2007-10-11 | 2011-03-08 | Celanese International Corporation | Method and apparatus for making acetic acid with improved productivity |
-
1998
- 1998-11-05 CA CA002308418A patent/CA2308418A1/en not_active Abandoned
- 1998-11-05 EP EP05076973A patent/EP1607112B1/en not_active Expired - Lifetime
- 1998-11-05 AT AT05076974T patent/ATE420682T1/de not_active IP Right Cessation
- 1998-11-05 AT AT98960163T patent/ATE304378T1/de active
- 1998-11-05 DE DE69831596T patent/DE69831596T2/de not_active Expired - Lifetime
- 1998-11-05 DE DE69840488T patent/DE69840488D1/de not_active Expired - Lifetime
- 1998-11-05 EP EP98960163A patent/EP1037682B1/en not_active Expired - Lifetime
- 1998-11-05 ES ES98960163T patent/ES2252871T3/es not_active Expired - Lifetime
- 1998-11-05 DE DE69839165T patent/DE69839165T2/de not_active Expired - Lifetime
- 1998-11-05 EP EP05076974A patent/EP1611911B1/en not_active Expired - Lifetime
- 1998-11-05 JP JP2000520179A patent/JP4270748B2/ja not_active Expired - Fee Related
- 1998-11-05 AT AT05076973T patent/ATE386562T1/de active
- 1998-11-05 WO PCT/US1998/023736 patent/WO1999024095A2/en active IP Right Grant
-
2002
- 2002-06-14 US US10/172,674 patent/US7128729B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101001894B (zh) * | 2004-08-04 | 2010-11-10 | 旭硝子株式会社 | 含氟弹性共聚物、其组合物及交联橡胶 |
| JP2016221350A (ja) * | 2009-07-24 | 2016-12-28 | バイエル メディカル ケア インコーポレーテッド | 多流体医療用注入器システムおよび操作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20030018252A1 (en) | 2003-01-23 |
| ATE420682T1 (de) | 2009-01-15 |
| EP1611911A1 (en) | 2006-01-04 |
| ES2252871T3 (es) | 2006-05-16 |
| EP1037682B1 (en) | 2005-09-14 |
| DE69839165D1 (de) | 2008-04-03 |
| WO1999024095A2 (en) | 1999-05-20 |
| ATE386562T1 (de) | 2008-03-15 |
| EP1037682A2 (en) | 2000-09-27 |
| CA2308418A1 (en) | 1999-05-20 |
| ATE304378T1 (de) | 2005-09-15 |
| DE69840488D1 (de) | 2009-03-05 |
| DE69839165T2 (de) | 2009-02-19 |
| US7128729B2 (en) | 2006-10-31 |
| EP1611911B1 (en) | 2009-01-14 |
| DE69831596T2 (de) | 2006-06-22 |
| EP1607112A1 (en) | 2005-12-21 |
| WO1999024095A3 (en) | 1999-08-19 |
| JP2001522660A (ja) | 2001-11-20 |
| DE69831596D1 (de) | 2005-10-20 |
| EP1607112B1 (en) | 2008-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4270748B2 (ja) | 多数プロセッサの冗長性を備える血管造影用注射器装置 | |
| US7662124B2 (en) | System and method for multiple injection procedures on heart vessels | |
| US8082018B2 (en) | System and method for multiple injection procedures on heart vessels | |
| JP5897060B2 (ja) | 電動薬液注入システムのユーザーに設定情報を提供する方法 | |
| US20030028145A1 (en) | Angiographic injector system with multiple processor redundancy | |
| US8882702B2 (en) | Medical fluid injection system | |
| EP0821566B1 (en) | Angiographic injector | |
| WO2007133942A2 (en) | Air purge in a fluid injection system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090210 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090224 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130306 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130306 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140306 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |