JP4187553B2 - 移動体通信システムおよび通信制御装置 - Google Patents
移動体通信システムおよび通信制御装置 Download PDFInfo
- Publication number
- JP4187553B2 JP4187553B2 JP2003081548A JP2003081548A JP4187553B2 JP 4187553 B2 JP4187553 B2 JP 4187553B2 JP 2003081548 A JP2003081548 A JP 2003081548A JP 2003081548 A JP2003081548 A JP 2003081548A JP 4187553 B2 JP4187553 B2 JP 4187553B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- communication
- communication device
- controller
- mobile communication
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images































Landscapes
- Mobile Radio Communication Systems (AREA)
Description
【発明の属する技術分野】
本発明は、互いに離れて配置される複数の通信機と、それら通信機に対して相対的に移動する通信機とを含む移動体通信システムに関する。
【0002】
【従来の技術】
従来、種々の用途に合わせた移動体通信システムが提案されている。例えば、列車と固定通信局との間の通信に関して、従来は音声等の簡単な通信が一般的であった。しかし、セキュリティへの関心が高まる中、列車にも監視カメラを設けることが適当と考えられ、これに伴い、監視カメラで得られる画像を送れるだけの能力をもった通信システムが必要になる。
【0003】
従来より知られている列車用の通信システムとしては、特許文献1に記載のものが挙げられる。同文献のシステムでは、列車上の通信機が、線路に沿って適当な距離をおいて配置された複数の固定通信局と接続される。
【0004】
【特許文献1】
特開2000−115193号公報(第4ページ、図1)
【0005】
【発明が解決しようとする課題】
上記特開2000−115193号公報に記載のシステムでは、送信権を表す信号を含むパケットを固定局から固定局へと送信することにより、固定局間で送信権が移され、これにより固定局間のデータの衝突が回避される。
【0006】
しかし、送信権の移動のためのパケット送信はオーバーヘッドの要因となり、通信システムにとって不利である。そして、列車のような移動体の通信システムにおいては、簡単かつ確実に1台の移動通信機と線路沿いの複数の通信機との間の通信、すなわち1対多の通信を実現することが望まれる。
【0007】
なお、上述では、電車を取り上げて本発明の背景を説明したが、上記背景は、電車に限らず、他の移動体にも当てはまり得る。
【0008】
本発明は上記課題に鑑みてなされたものであり、その目的は、比較的簡単に1対多の移動体通信を実現できる技術を提供することにある。
【0009】
【課題を解決するための手段】
上記課題を解決するため、本発明の移動体通信システムは、互いに離れて配置される複数の制御側通信機と、前記複数の制御側通信機に対して相対的に移動する移動通信機と、前記複数の制御側通信機を制御する制御機とを含み、前記制御機は、前記複数の制御側通信機の一つである代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせる。
【0010】
この構成によれば、複数の制御側通信機を制御する制御機が設けられ、この制御機により代表通信機が選択され、代表通信機が移動通信機と双方向通信を行い、残りの制御側通信機は、移動通信機が発する信号を受信する一方向通信を行うので、複数の制御側通信機の存在を移動通信機が考慮せずともよく、1対多の移動体通信が比較的簡単に実現でき、このシステムを利用して画像等の送信も可能になる。
【0011】
また、前記制御機は、前記複数の制御側通信機の各々の通信状態に基づいて前記代表通信機を選択する。本発明において、受信状態は、通信状態の一種と考えてよい。受信状態は例えばパケット受信比で表される。
【0012】
この構成によれば、代表受信機を通信状態に基づいて選択することで、より確実な通信を行える代表受信機を選択できる。
【0013】
また、前記制御機は、前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得する。
【0014】
この構成によれば、複数の制御側通信機で、移動通信機から送信される一連のパケットが受信され、複数の移動通信機から得られるパケット群を用いて、元の一連のパケットが再構成されるので、一連のパケットを確実に得ることができる。本発明のように移動通信機が制御側通信機に対して移動する構成では、マルチパス等の影響で、制御側通信機が一つであると、一部のパケットが抜け落ちる可能性があるのに対して、本発明によれば、パケットが抜けるのを比較的簡易な構成で、効果的に防止できる。
【0015】
また、前記制御機は、前記複数の制御側通信機により受信されるパケット群に複数の同一パケットが含まれるとき、前記複数の同一パケットの各々を受信した制御側通信機の通信状態に基づいて、前記複数の同一パケットの一つを選択する。
【0016】
この構成によれば、通信状態に基づいてパケットを選択するので、良好な通信状態で受信されたパケットを採用することができ、画像等のデータの品質を確保できる。
【0017】
また、前記制御機は、所定の期間内に前記複数の制御側通信機が受信したパケット群から、前記一連のパケットを取得する。
【0018】
この構成により、異なる一連のデータのパケットの混同が避けられる。そして、混同を防止するための処理が不要なので、処理の簡素化を図れる。
【0019】
また、本発明においては、前記制御機と前記複数の制御側通信機により、前記複数の制御側通信機が網羅する通信領域をもつ単位通信網が構成され、通信領域が隣接するように複数の単位通信網が設けられる。
【0020】
この構成により、列車等の細長い区間を移動する移動体システムに対して、本発明の移動通信システムを好適に適用可能である。
【0021】
また、本発明のシステムは、前記複数の単位通信網のそれぞれ設けられた複数の制御機を制御する上位制御手段を有し、前記上位制御手段は、前記移動通信機の位置情報を取得し、前記位置情報に基づいて、前記移動通信機と通信すべき単位通信網を切り替える制御を行う。
【0022】
この構成によれば、位置情報に基づくことで、移動体の移動に伴う単位通信網の切替が好適に行われる。そして、上位制御手段から上の構成が上位制御手段以下の構成を制御する必要を無くすことができ、制御システムが簡素でよくなる。
【0023】
また、本発明においては、前記複数の単位通信網のそれぞれ設けられた複数の制御機を制御する上位制御手段を有し、前記上位制御手段は、隣接する各単位制御網の制御機から、各単位通信網の制御側通信機の通信状態の情報を取得して、取得された通信状態の情報に応じて、前記移動通信機と通信すべき単位通信網を切り替える制御を行う。
【0024】
この構成によれば、通信状態に応じて、移動体の移動に伴う単位通信網の切替が好適に行われる。また、ここでも、上位制御手段から上の構成が上位制御手段以下の構成を制御する必要を無くすことができ、制御システムが簡素でよくなる。
【0025】
また、本発明においては、隣接する単位通信網の通信領域が部分的に重複するように、隣接する異なる単位制御網を構成する複数の制御側通信機が近傍または同一箇所に配置されている。
【0026】
この構成によれば、隣接する異なる単位制御網を構成する複数の制御側通信機を近傍または同一箇所に配置することにより、ハンドオーバを行うのに十分な時間を取ることができる。例えば、画像の切替をスムーズに行える。
【0027】
また、本発明では、前記移動通信機が周期的に発する信号に応じて前記複数の制御側通信機と前記移動通信機との同期が制御される。
【0028】
この構成によれば、移動通信機が同期制御を行っており、同期のための信号を複数の制御側通信機で受けるので、例えば、移動通信機に近い制御側通信機がマルチパスの影響で同期の信号を受信できないときでも、他の制御側通信機が受信できる可能性があり、したがって同期をより確実にとれる。
【0029】
また、本発明のシステムは、前記移動通信機を搭載する移動体の移動初期に移動体識別情報が発生するときに、前記移動通信機に固有の移動通信機固有識別情報を前記移動通信機から通信で取得する初期設定登録通信機と、前記移動通信機固有識別情報を前記移動体識別情報と共に登録し、それら識別情報を前記移動体が移動するあいだ管理し、各単位通信網に位置する移動通信機との通信のために前記移動通信機固有識別情報を提供する識別情報データベースとを含む。
【0030】
この構成によれば、初期設定登録通信機が設けられ、この初期設定登録通信機が、移動体識別情報の発生時に移動通信機固有識別情報を取得する。この情報が識別情報データベースに登録され、各単位通信網での通信のために提供される。このようにして、各単位通信網で、そこに位置する移動体上の移動通信機と円滑に通信が行える。
【0031】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置に関する。この通信制御装置は、前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせる。
【0032】
この態様によれば、既に述べたように、1対多の移動体通信が比較的簡単に実現できる。
【0033】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機と、前記複数の制御側通信機に対して相対的に移動する移動通信機と、前記複数の制御側通信機を制御する制御機と、を含み、前記複数の制御側通信機の各々は、前記移動通信機が一連のパケットを送信したとき、受信されたパケットを前記制御機へ出力し、前記制御機は、前記複数の制御側通信機から得られるパケット群から、前記一連のパケットを取得する。
【0034】
この構成によれば、既に説明したように、複数の移動通信機から得られるパケット群を用いて、元の一連のパケットが再構成されるので、一連のパケットを確実に得ることができる。
【0035】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置であって、前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得し、前記複数の制御側通信機により受信されるパケット群に複数の同一パケットが含まれるとき、前記複数の同一パケットの各々を受信した制御側通信機の通信状態に基づいて、前記複数の同一パケットの一つを選択する。この構成によっても、既に説明したように、一連のパケットを確実に得ることができる。すなわち、この構成によれば、複数の制御側通信機で、移動通信機から送信される一連のパケットが受信され、複数の移動通信機から得られるパケット群を用いて、元の一連のパケットが再構成されるので、一連のパケットを確実に得ることができる。本発明のように移動通信機が制御側通信機に対して移動する構成では、マルチパス等の影響で、制御側通信機が一つであると、一部のパケットが抜け落ちる可能性があるのに対して、本発明によれば、パケットが抜けるのを比較的簡易な構成で、効果的に防止できる。さらに、この構成によれば、通信状態に基づいてパケットを選択するので、良好な通信状態で受信されたパケットを採用することができ、画像等のデータの品質を確保できる。
【0036】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置であって、前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得し、所定の期間内に前記複数の制御側通信機が受信したパケット群から、前記一連のパケットを取得する。この構成によっても、既に説明したように、一連のパケットを確実に得ることができる。さらに、この構成により、異なる一連のデータのパケットの混同が避けられる。そして、混同を防止するための処理が不要なので、処理の簡素化を図ることができる。
【0037】
また、本発明の別態様の移動体通信システムは、互いに離れて配置される複数の制御側通信機と、前記複数の制御側通信機に対して相対的に移動する移動通信機と、前記複数の制御側通信機を制御する制御機と、を含み、さらに、前記移動通信機を搭載する移動体の移動初期に移動体識別情報が発生するときに、前記移動通信機に固有の移動通信機固有識別情報を前記移動通信機から通信で取得する初期設定登録通信機と、前記移動通信機固有識別情報を前記移動体識別情報と共に登録し、それら識別情報を前記移動体が移動するあいだ管理し、各単位通信網に位置する移動通信機との通信のために前記移動通信機固有識別情報を提供する識別情報データベースとを含む。
【0038】
この構成によれば、既に説明したように、各単位通信網で、そこに位置する移動体上の移動通信機と円滑に通信が行える。
【0039】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機と通信を行わせる通信制御方法に関する。本方法は、前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせる。
【0040】
この構成によれば、既に説明したように、1対多の移動体通信が比較的簡単に実現できる。
【0041】
本発明の別の態様は、互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機と通信を行わせる制御機にて実行される通信制御プログラムである。このプログラムは、前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせる処理を前記制御機に実行させることを特徴とする通信制御プログラム。また、本発明の別の態様は、上記の通信制御プログラムが格納された、コンピュータにて読取可能な記録媒体である。
【0042】
これら構成によれば、既に説明したように、1対多の移動体通信が比較的簡単に実現できる。
【0043】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を参照して説明する。
【0044】
図1は、本実施の形態の移動体通信システムの全体構成を示しており、図2は、移動体通信システムが設けられる移動システムを示している。
【0045】
まず、図2を参照すると、本実施の形態では、移動体が電車(列車)Tである。各列車Tには、運行ダイヤ上での識別情報である列車番号(以下、列番という)が付けられる。電車の路線は、複数の閉塞区間Dへと分割されている。各閉塞区間Dには一つの列車Tが存在するように列車の運行が制御される。図2の例では、閉塞区間Dが、駅で区切られる区間と一致しているが、本発明はこれに限定されない。また、本発明の移動体は電車に限定されない。このように、閉塞区間Dは単位制御領域の一例であり、列番は移動体の識別情報の一例である。
【0046】
次に、図1を参照すると、本実施の形態では、電車の線路に沿って並ぶように複数の単位通信網Nが設けられている。本実施の形態では、各単位通信網Nは閉塞区間Dに対応しているが、本発明はこれに限定されなくてもよい。
【0047】
各単位通信網Nは、複数の制御側通信機Sと、それらを制御する制御機Cで構成される。複数の制御側通信機Sは、線路に沿って、適当な間隔を開けて配置されており、列車Tに搭載される移動通信機Mとの間で通信を行う。
【0048】
また、各移動通信機Mは、固有のシステムIDを有する。このシステムIDは、移動通信機Mを識別するための移動通信機固有識別情報の一例である。前述の列番(移動体識別情報)は運行スケジュールによって決まり、同じ車両でも運行スケジュールに応じて列番は変化する。これに対して、システムID(移動通信機識別情報)は、運行スケジュールには関係しない。
【0049】
複数の制御機Cは、さらに、上位制御機Csにより制御される。制御機Csは、監視センタMCおよび指令所DCと接続されている。上位制御機Cs、監視センタMCおよび指令所DCが、複数の制御機C(複数の単位通信網N)を制御する上位の制御手段として機能するともいえる。
【0050】
本実施の形態の移動体通信システムは、電車内の監視カメラで得られた映像および音声を通信するために用いられる。映像および音声は、移動通信機Mから送信され、制御側通信機Sで受信される。この観点で、以下の説明では、移動通信機Mを送信機、制御側通信機Sを受信機と呼ぶ。ただし、上述の説明から明らかなように、送信機、受信機ともに、送信と受信の両方の通信機能を有する。
【0051】
図3は、図1の移動体通信システムをより詳細に示している。図3に示すように、閉塞区間D1には、唯一の1編成の列車T1が走行している。そして、列車T1の列番はTN1であり、また、列車T1には送信機M1が搭載されている。同様に、閉塞区間D2には列番TN2の列車T2が走行しており、列車T2に送信機M2が搭載されている。
【0052】
閉塞区間D1には、複数の受信機Si(i=1〜n)が間隔を開けて配置されている。受信機Siは、送信機M1から送信される画像データ等を送受信する。そして、閉塞区間D1の複数の受信機Siを制御するための制御機C1が設けられており、制御機C1は複数の受信機Siから画像データ等を受信する。複数の受信機Siおよび制御機C1で構成される通信網を、前述のように、単位通信網Nと呼ぶ。
【0053】
別の閉塞区間D2にも同様の構成が見られる。すなわち、複数の受信機Siと制御機C2が設けられており、複数の受信機Siは、制御機C2の制御下で送信機M2と通信する。
【0054】
さらに、複数の制御機C1、C2、、、を制御するために、上位制御機Csが設けられている。これらの送信機、受信機、制御機および上位制御機の系を無線網WNと呼ぶ。無線網WNは、上述の説明から明らかなように、複数の単位通信網Nで構成される。
【0055】
上位制御機Csは、監視センタMCおよび指令所DCと接続される。監視センタMCは、モニタにて車内を監視する。また、指令所DCは、列番・閉塞区間データベースDB1と列番・システムIDデータベースDB2(本発明の識別情報データベースに対応)を有する。列番・閉塞区間データベースDB1は列番と閉塞区間番号を管理し、列番・システムIDデータベースDB2は列番とシステムIDを管理する。
【0056】
次に、図3を参照し、監視センタMC、指令所DC、無線網WNで構成される本システムの全体的な動作を説明する。無線網WNからは、常に閉塞区間毎の画像および音声が監視センタMCのスイッチャに入力される(S31)。また、初期設定で列番とシステムIDが指令所DCのデータベースに登録される(S32)。この登録動作は、車両が閉塞区間を跨ぐ場合にも、同様に実行される。
【0057】
監視センタMCでモニタの画像を切り替えるとき、監視者は、カメラ切替卓を操作して、見たい列番を指定する。これに応えて、列番が、カメラ切替卓から指令所DCの列番・閉塞区間データベースDB1に送られる(S33)。
【0058】
列番・閉塞区間データベースDB1は、それぞれの列番を付された列車がどの閉塞区間に位置しているかの情報を記憶している。電車の運行管理システムは、列車を円滑に走行させるために、どの閉塞区間にどの列車がいるのかの情報を取得し、この情報をデータベースに記憶させており、これにより、各列車の位置する閉塞区間を常時把握している。この運行管理システムのデータベースが、本システムの列番・閉塞区間データベースDB1として利用される。
【0059】
そして、列番を監視センタMCから受け取ると、列番・閉塞区間データベースDB1では、列番に対応する閉塞区間番号が検索される。そして、検索された閉塞区間番号がスイッチャに通知される(S34)。スイッチャには、各閉塞区間毎の画像、音声データが入力されている。スイッチャは、指定の閉塞区間番号の画像、音声データに切り替えて、画像および音声をモニタに出力する。
【0060】
以上が本実施の形態のシステムの全体的な動作である。本システムでは、閉塞区間毎の画像および音声データが監視センタに入力されてくる。そこで、複数の閉塞区間に位置する複数の列車の画像、例えば、閉塞区間D1の列番TN1の画像と閉塞区間D2の列番2の画像とを両方同時にモニタすることができる。
【0061】
また、本実施の形態では、閉塞区間ごとに単位通信網が設けられ、単位通信網の制御機から、上位制御機および監視センタへと、単位通信網の複数の受信機で入手されたデータが送られてくる。したがって、監視センサおよび上位制御機といった上位の構成は、単位通信網(閉塞区間)を制御の単位とすればよい。すなわち、単位通信網を構成する複数の受信機の配置が考慮されなくてもよく、また、一つ一つの受信機の受信状態(通信状態に概念的に含まれる)が考慮されなくてもよい。これにより、制御が簡素化している。この点は、以下の各構成の詳細な説明により、さらに明らかになる。
【0062】
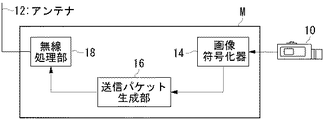
図4は、各列車に搭載される送信機Mの構成を示すブロック図である。送信機Mは、車載のカメラ10およびアンテナ12と接続されている。送信機Mは、カメラ10からの画像データを符号化する画像符号化器14と、画像符号化器14から出力される画像データを送信するための送信パケットを生成する送信パケット生成部16と、無線の送信を行う無線処理部18とで構成される。
【0063】
カメラ10から撮影された画像データが送信機Mに入力され、画像符号化器14で符号化される。次に、送信パケット生成部16が、符号化された画像データから、受信機Sに対して送信するための送信先アドレス、送信元アドレス等のヘッダ情報を送信データに付加した送信パケットを生成する。生成した画像パケットが、無線処理部18にてアンテナ12を利用して送信される。音声データも同様にしてパケットデータのかたちで送信される。
【0064】
図5は、受信機Sの構成を示すブロック図である。受信機Sはアンテナ20を有する。そして、受信機Mは、無線処理部22とパケット受信比算出部24で構成される。
【0065】
無線処理部22は、アンテナ20を使って無線の受信を行う。無線処理部22が送信機Mからパケットを受信すると、パケット受信比算出部24が、受信したパケットからパケット受信比を算出する。パケット受信比は、「パケット受信比=(受信パケット数)/(理想受信パケット数)」で定義される。理想受信パケット数とは、データ伝送レートから設計される値である。この式に従ってパケット受信比算出部24によりパケット受信比が算出されると、受信機Sは制御機Cへ受信パケットと算出したパケット受信比を出力する。
【0066】
図6は制御機Cの構成を示すブロック図である。制御機Cは、複数のパケット受信処理部26および複数のパケット受信比受信部28を有する。図示のように、これら複数のパケット受信処理部26および複数のパケット受信比受信部28は、複数の制御機Si(i=1〜n)にそれぞれ対応して設けられている。制御機Cは、さらに、パケット受信処理部30、パケット合成部32、制御部34、受信時間計測部36およびタイマ管理部38を有する。
【0067】
制御機Cの動作を説明すると、まず、受信機Si(i=1〜n)から制御機Cにパケット受信比とパケットが入力されてくる。各受信機Siのパケット受信比およびパケットは、対応するパケット受信比受信部28およびパケット受信処理部26に入力される。
【0068】
複数のパケット受信比受信部28はパケット受信比をパケット受信比処理部30に送る。パケット受信比処理部30は、各受信機Siから得られるパケット受信比を、所定のパケット受信比しきい値E0と比較する。パケット受信比がしきい値E0以上であることが、後段のパケット採用の条件になる。パケット受信比処理部30は、この条件が満たされているか否か、すなわち、パケット受信比がしきい値E0以上であるか否かを判定する。パケット受信比処理部30は、上記の条件が満たされている受信機のパケット受信比を制御部34へ出力する。
【0069】
一方、各パケット受信処理部26は、各受信機Siからのパケットをパケット合成部32へ出力する。また、タイマ管理部38は、制御機Cの全体のシステム時間を管理している。受信時間計測部36では、各受信機Siからパケットを受信する時に、パケット毎に受信割り込みが発生し、最も早く受信した時間t1からタイマが仕掛けられる。そして、所定の時間t2が経過すると、タイマ管理部38からタイムアウトが入力される。続いて、タイムアウトがパケット合成部32に通知される。
【0070】
制御部34は、上述したように、パケット受信比がしきい値E0以上という条件を満たす受信機を示す情報をパケット受信比処理部30から取得する。この情報は、制御部34からパケット合成部32に通知される。パケット合成部32は、このパケット受信比の条件を満たす受信機Siから入力されたパケットを用いて、パケット合成を行う。この際、タイムアウト前に取得されたパケットが、パケット合成で使われる。パケット合成については、後段にてさらに説明する。パケット合成で得られたデータは、上位制御機Csへと出力される。
【0071】
図7は、上位制御機Csの構成を示すブロック図である。上位制御機Csは、複数の閉塞区間にそれぞれ設けられた複数の制御機Ci(i=1〜n)を制御する。上記制御機Csは、複数の制御機Ciにそれぞれ対応する複数の受信処理部40を有する。さらに、上位制御機Csは、受信データ解析部42と、複数の同期データ送信処理部44と、非同期データ送信処理部46を有する。複数の同期データ送信処理部44は、複数の制御機Ciにそれぞれ対応して設けられている。
【0072】
上位制御機Csには、制御機Ci(i=1〜n)から同期データ、非同期データが入力される。同期データは、画像および音声データである。また、非同期データは、画像およぼ音声以外のデータであり、例えば、システムID等の制御関連のデータである。同期データおよび非同期データは、各制御機Ciに対応する受信処理部40に入力され、受信データ解析部42に提供される。
【0073】
受信データ解析部42は、受信データが同期データか非同期データかを判別する。同期データは上述のように画像および音声データである。受信データが同期データであれば、受信データ解析部42は、受信データを同期データ送信処理部44に出力する。このとき、制御機番号に対応する同期データ送信処理部44へと受信データが出力される。例えば、制御機C1から受信処理部40が受信した同期データは、制御機C1に対応する同期データ送信処理部44へ出力される。同期データ送信処理部44は、同期データを監視センタMCへ出力する。これにより、単位通信網毎、すなわち閉塞区間毎の同期データが監視センタMCへ出力される。
【0074】
一方、受信データがシステムIDや閉塞区間番号の非同期データであれば、受信データ解析部42は、そのデータを非同期データ送信処理部46に出力する。非同期データ送信処理部46は、閉塞区間番号およびシステムIDを指令所DCへ出力する。
【0075】
図8は、監視センタMCの構成を示すブロック図である。監視センタMCには、図8の構成を実現するコンピュータシステムが設置されている。監視センタMCは複数の同期データ受信処理部48を有し、さらに、非同期データ受信処理部50、同期データスイッチ部42、制御部54およびカメラ切替卓56を有する。同期データスイッチ部42は、図3のスイッチャに相当する。
【0076】
複数の同期データ受信処理部48は、上位制御機Csの複数の同期データ送信処理部44に対応している。そして、上位制御機Csの複数の同期データ送信処理部44は、前述のように、複数の単位通信網にそれぞれ対応しており、すなわち、複数の閉塞区間にそれぞれ対応している。これにより、複数の同期データ受信処理部48は、複数の閉塞区間からの同期データ(画像および音声)をそれぞれ受信する。
【0077】
入力された同期データは、同期データスイッチ部52に出力される。そして、同期データスイッチ部52で選択された閉塞区間の同期データがモニタに出力される。
【0078】
同期データスイッチ部52での閉塞区間の選択は、以下のようにして、監視を行う監視者の指示に従って行われる。監視者は、カメラ切替卓56を操作して、所望の閉塞区間を選択する。例えば、各閉塞区間に付された閉塞区間番号が選択される。入力された閉塞区間の指示は、カメラ切替卓56から、制御部54を介して、同期データスイッチ部52へ伝えられる。同期データスイッチ部52は、指示された閉塞区間の同期データをモニタへ出力するように動作する。
【0079】
監視者は、カメラ切替卓56を操作して、所望の列番を入力してもよい。列番は、制御部54に伝達され、制御部54から指令所DCへ出力される。これにより、入力された列番の列車が位置する閉塞区間が問い合わされる。指令所DCは、前述のように、閉塞区間とそこに位置する列番を管理する列番・閉塞区間データベースDB1を有する。この列番・閉塞区間データベースDB1が検索され、列番に対応する閉塞区間番号が求められ、監視センタMCへ返される。
【0080】
この応答は、非同期データ受信処理部50に入力される。入力された閉塞区間番号は同期データスイッチ部52に出力される。同期データスイッチ部52では、入力された閉塞区間番号の同期データがモニタへと出力される。
【0081】
図9は、指令所DCの構成を示すブロック図である。指令所DCには、図9の構成を実現するコンピュータシステムが設置されている。指令所DCのコンピュータシステムは、監視センタMCのコンピュータシステムと一体に設けられてもよい。さらに、上位制御機Csも、監視センタMCおよび指令所DCの一方または両方と同じ場所に設けられてもよい。指令所DCは、2つの非同期データ受信処理部58、60を有し、さらに、閉塞区間番号検索部62、データベース制御部64および非同期データ送信処理部66を有する。
【0082】
前述のように、監視センタMCは、指令所DCへ、閉塞区間を問い合わせるための列番を送る。この列番が、非同期データ受信処理部58に入力される。この列番の情報は、閉塞区間番号検索部62に送られる。閉塞区間番号検索部62は、列番・閉塞区間データベースDB1を参照して、列番に対応する閉塞区間番号、すなわち、得られた列番の列車が位置する閉塞区間の番号を検索する。検索結果は、非同期データ送信処理部66から監視センタMCに送信される。監視センタMCでは、前述のように、閉塞区間番号に基づいて、該当する閉塞区間の同期データがモニタに出力される。
【0083】
もう一つの非同期データ受信処理部60には、初期設定時に、上位制御機CsからシステムIDが入力される。システムIDは、前述のように、列車に搭載される送信に固有の識別情報である。システムIDは、例えば列車が始発駅を出るとき、すなわち、列車に列番が付与されるときに、入力される。システムIDは、非同期データ受信処理部60からデータベース制御部64に出力される。データベース制御部64は、システムIDを、列番・システムIDデータベースDB2に登録する。
【0084】
また、列車が閉塞区間を跨ぐ毎に、新たなシステムIDが非同期データ受信処理部60へ入力されてくる。このシステムIDはデータベース制御部64へ出力される。そして、データベース制御部64は、システムIDを用いて、列番・システムIDデータベースDB2から、システムIDに対応する列番を検索する。そして、この検索結果の列番を用いて、列番・閉塞区間データベースDB1が更新される。
【0085】
以上に、本実施の形態における通信システムの典型的な構成例を説明した。次に、他の構成例を説明する。
【0086】
図10は、別の構成例を示すブロック図である。図3のシステムでは、列番・閉塞区間データベースDB1が指令所DCに設けられていたのに対して、図10のシステムでは、列番・閉塞区間データベースDB1が監視センタMCに設けられている。図10の他の構成は、図3のシステムと同様である。以下、既に説明した事項は省略する。
【0087】
図10に示されるように、本実施の形態では、無線網WN(図3と同様)から画像および音声のパケットデータが監視センタMCに入力される(S101)。監視センタにて監視者がモニタの画像を切り替えるとき、監視者は、まず、カメラ切替卓を操作して、表示させたい列車の列番を指定する。列番が入力されると、列番・閉塞区間データベースDB1を用いて、列番に対応する閉塞区間番号が検索される(S102)。そして、カメラ操作卓は、検索結果として受け取った閉塞区間番号をスイッチャに渡す(S103)。スイッチャは、指定された閉塞区間番号の画像、音声データをモニターに出力する。
【0088】
また、前述した図3のシステムの動作と同様に、初期設定時に列番とシステムIDが列番・システムIDデータベースDB2に登録される(S104)。さらに、車両が閉塞区間を跨ぐ毎に、列番・閉塞区間データベースDB1に登録が行われる(S105)。
【0089】
図11は、もう一つの構成例を示すブロック図である。図3のシステムと異なり、図11のシステムでは、列番・システムIDデータベースDB2が上位制御機Csに設けられている。図10の他の構成は、図3のシステムと同様であり、以下、既に説明した事項は省略する。
【0090】
図示のように、本実施の形態では、上位制御機Csに列番・システムIDデータベースDB2が繋がっている。そして、初期設定時に、システムIDと列番が列番・システムIDデータベースDB2に登録される(S111)。
【0091】
画像および音声データは、閉塞区間を動的に割り当てられた状態で、監視センタMCに送られる(S112)。この動的割当てに対応して、画像および音声データとともに列番の情報が送られる。画像および音声データは、監視センタMCのスイッチャに入力される。
【0092】
監視センタにて監視者がモニタの画像を切り替えるとき、監視者は、まず、カメラ切替卓を操作して、表示させたい列車の列番を指定する。カメラ切替卓は、指定された列番を用いて、指令所DCにある列番・閉塞区間データベースDB1から、列番に対応する閉塞区間番号を検索する(S113)。ここでは、カメラ切替卓の図示しない制御部が、カメラ切替卓に入力された列番を指令所DCへ送る。そして、指令所DCから送られた検索結果がカメラ切替卓の制御部に取得される。
【0093】
カメラ切替卓は、検索結果として受け取った閉塞区間番号をスイッチャに渡す(S114)。スイッチャは、指定された閉塞区間番号の画像、音声データをモニタに出力する。
【0094】
また、列車が閉塞区間を跨ぐ毎に列番と閉塞区間番号が、指令所DCにある列番・閉塞区間データベースDB1に登録される(S115)。さらに、上述のように、列番とシステムIDは、初期設定時に、上位制御機Csに繋がっている列番・システムIDデータベースDB2に登録される。
【0095】
以上、本実施の形態について、主として全体的な構成と動作を説明し、さらにその変形例(図10、図11)を説明した。次に、本実施の形態のシステムのより詳細な動作について説明する。以下の説明では、主として図3の構成例を想定する。
【0096】
「パケット合成」
前述したように、図3の制御機C1は、配下の複数の受信機S1、S2、、、から得られるパケットを使ってパケット合成を行う。制御機C2も同様のパケット合成を行う。以下、このパケット合成について、図を参照して説明する。
【0097】
ここでは、まず、図12を参照し、パケット受信比に基づくパケット合成を説明する。そして、次に、図13を参照し、パケット受信比に加えて、遅延時間を考慮したパケット合成を説明する。なお、図3のシステムの受信機は、図6を参照して説明したように、タイムアウトまでの経過時間を管理しており、図13のパケット合成に対応している。
【0098】
また、ここでは、説明を分かりやすくするために、画像データのパケットのみについて説明する。しかし、音声データのパケットも同様に合成される。
【0099】
図12を参照すると、制御機は、受信機Si(i=1〜n)から画像パケットを受信する。また、同時に、制御機は、受信機Siのパケット受信比Ei(i=1〜n)を受信する。
【0100】
図12の例において、周期先頭から次の周期先頭までの周期時間はTであり、同期制御は、後述するように、送信機により行われている。制御機は、時間t1にて、受信機S1から最初のパケットV[0]を受信する。続いて、制御機は、受信機S1から、1つのフレームを構成する画像パケットを、V[3]を除いてすべて受信する。1フレームがn個のパケットで構成されているとすると、制御機は、受信機S1から、パケットV[3]が落ちているn−1個のパケットを受信する。
【0101】
同様に、制御機は、受信機S2からは、パケットV[4]、V[5]、V[m]が落ちているn−3個のパケットを受信する。また、制御機は、受信機S3からは、パケットV[0]、V[3]〜V[m]を受信し、受信機S4からは、パケットV[0]のみを受信する。さらに、制御機は、受信機S5〜Snからはパケットを全く受信できないとする。
【0102】
制御機は、パケット受信比Eiを所定のしきい値E0と比較する。そして、パケット受信比Eiがしきい値E0以上であれば(Ei≧E0)、対応する受信機Siのパケットが、パケット合成に使われるための条件を満たしている。図12の例の場合、受信機S1、S2、S3のパケット受信比E1、E2、E3がしきい値E0以上であり、かつ、E0≦E3≦E2≦E1の関係があるとする。一方、受信機S4〜Snのパケット受信比E4〜Enはしきい値E0未満であるとする。
【0103】
この場合、受信機S1、S2、S3が受信したパケットが、パケット合成の対象になる。制御機は、パケットV[0]からパケットV[n]まで順番に、受信機S1、S2、S3が受信したパケットを選択していく。複数の受信機で同一のパケットが受信されている場合には、制御機は、パケット受信比の高い受信機からのパケットを採用する。例えば、パケットV[0]は、受信機S1、S2、S3のすべてで選択されているが、パケット受信比が最も高い受信機S1のパケットが採用される。制御機は、こうして選択されたパケットを合成して、1フレームの画像データを生成する。
【0104】
このような処理の結果、図12に示されるように、合成されたデータは、受信機S1から得られたパケットV[0]〜パケットV[2]、受信機S2から得られたパケットV[3]および受信機S1から得られたパケットV[4]〜V[n]で構成される。
【0105】
図13は、さらに遅延時間を考慮したパケット合成処理を示している。図13の例では、制御機は、複数の受信機Si(i=1〜n)から出力される画像パケットを、一定の時間(t2−t1)の間、受け付ける。すなわち、最初に受信機からパケットを受信した時間t1から、時間t2が経過するまで、パケットが受け付けられ、受け付けられたパケット群を用いてパケット合成が行われる。
【0106】
ここで、時間t1は、複数の受信機Si(i=1〜n)から送信されるパケット群の中で、最初のパケットが受信された時間である。時間t1は、制御機のソフトウェアに受信割り込みが上がってきた一定時間で定義される周期時間Tの先頭からの経過時間を示す。
【0107】
時間t2は、最大で時間t1から周期時間Tが経過するまでの間の適当な長さに予め設定される。周期時間Tは、制御機が管理する一定時間で定義される。t1、t2およびTは、t2<t1+Tの関係にある。
【0108】
実際の設計としては、t2は以下のように設定される。t1時間は周期時間Tと比べて十分に小さい値である。画像データが送信機から受信機に到達する時間は、周期時間Tの半分とマージンを加えた時間とすると良い。例えば、画像データが送信機から受信機に到達する時間を、周期時間Tの半分であるT/2と考える。そして、時間t2を、画像データが受信機に到達する時間にT/4時間の余裕を加えた時間と設計する。即ち、t2=3T/4時間と設定すれば良い。
【0109】
この例のように時間t2を設定すると、複数の受信機Siが受信するパケットを集めれば、一連のデータを構成する全パケットが高い確率で揃う。しかも、異なる一連のデータのパケットが混ざり、処理が複雑化するのを回避できる。図13の画像の例では、1フレームを構成するパケットを集めることができ、また、異なるフレームのパケットが混ざらないように図ることができる。
【0110】
パケット合成は、以下のようにして行われる。制御機は、上記の時間t2を用いて、時間t2の経過前に受信されたパケットを合成処理に使う。また、パケット受信比については、制御機は、前述の例と同様の処理を行う。すなわち、制御機は、パケット受信比がしきい値E0以上の受信機から得られたパケットを合成処理に使う。同一のパケットが異なる受信機から得られているときは、パケット受信比が高い受信機から得られたパケットが採用される。
【0111】
図13の例を具体的に説明する。図13では、受信機S2で最初にパケットが受信される。この受信時間がt1である。受信機S2では、パケットV[3]〜V[m−1]が受信されないが、残りの全パケットが受信される。
【0112】
また、受信機S1は、パケットV[2]を除く全パケットを受信する。しかし、パケットV[m]以降のパケットは、時間t2が経過した後に送られてきたパケットである。そのため、タイムアウトの判定に従い、制御機では、パケットV[m]以降のパケットは破棄される。
【0113】
受信機S3は、パケットV[0]のみを受信している。このパケットV[0]は、時間t2より前に受信されている。受信機S4〜Snは、パケットを受信していない。
【0114】
また、パケット受信比については、受信機S1、S2のパケット受信比E1、E2がしきい値E0以上であり、E1≦E2である。残りの受信機のパケット受信比はしきい値E0未満である。そこで、受信機S1、S2からのパケットのみがパケット合成で使われる。そして、同じパケットが両受信機S1、S2で受信されるときは、受信機S2が受信したパケットが採用される。図13の例では、V[0]、V[1]は、受信機S1、S2で受信されているが、受信機S2の受信したパケットが採用される。
【0115】
このような処理の結果、図示のように、パケットV[0]〜V[2]は、受信機S2から採用され、パケットV[3]〜V[m−1]は、受信機S1から採用され、パケットV[m]〜V[n]は、受信機S2から採用されている。
【0116】
以上に説明したように、本実施の形態では、複数の受信機で、送信機から送信される一連のパケットを受信する。そして、複数の受信機から得られるパケット群を用いて、元の一連のパケットを再構成する。これにより、一連のパケットを確実に得ることができる。
【0117】
特に、本実施の形態のように送信機が受信機に対して移動する構成では、マルチパス等の影響で、受信機が一つであると、一部のパケットが抜け落ちる可能性がある。これに対して、本発明によれば、パケットが抜けるのを、比較的簡易な構成で、効果的に防止できる。
【0118】
また、本実施の形態では、パケット受信比を用いて、高いパケット受信比で受信されたデータを採用するので、画質等のデータの品質を確保できる。本実施の形態ではパケット受信比を用いたが、本発明はこれに限定されない。受信状態または通信状態を示す他のパラメータ、例えば、電界強度RSSI値が用いられても良い。
【0119】
また、本実施の形態では、所定の時間が経過する間に受信されたパケットが、合成処理に使用される。これにより、前述したように、異なる一連のデータのパケットの混同が避けられる。混同を防止するための処理が不要なので、処理の簡素化も図れる。
【0120】
「代表受信機の選択」
次に、単位通信網における代表受信機の選択について説明する。また、ここでは、本システムにおける、送信機による同期制御についても説明される。
【0121】
図1〜図3を用いて既に説明したように、本実施の形態のシステムにおいて、単位通信網は、複数の受信機Si(i=1〜n)で構成される。本システムでは、複数の受信機Siの一つが制御機Cにより代表受信機として選択される。この代表受信機が、列車に搭載される送信機と双方向通信を行う。残りの受信機は、送信機能をマスクされる。この送信マスクにより、残りの受信機は、送信機から送信されるデータの受信のみを行う。代表受信機の選択制御は、以下のようにして、行われる。
【0122】
図14を参照すると、列車上の送信機Mが網同期を行う。すなわち、送信機Mが所定の周期時間Tを刻む。送信機Mは、周期先頭がきたときに、複数の受信機Si(i=1〜n、図14の例ではn=4)に対して、音声パケットおよび画像パケットから構成される同期パケットを送信する(S141)。送信機Mは受信機Siの状態に関わらず、一定時間毎にパケットを送信する。
【0123】
各受信機Siは、同期データを受信し始めてから、送信機M側と同じ所定の周期時間Tを刻む。すなわち、各受信機Siは、列車が近づいて、同期データを受信し始めると、周期時間Tに従う制御を開始する。
【0124】
上述のように、送信機Mが同期データとしてパケットを送信すると(S141)、複数の受信機Siの各々は、パケットを受信して、パケット受信比を算出する(S142)。パケット受信比は、既に説明したように、これら受信機Siを制御する制御機C(図3)へと送られる。制御機Cは、複数の受信機Siから送られたパケット受信比Eiに基づいて、1台の受信機を、代表受信機として選択する。
【0125】
本実施の形態では、制御機Cは、最大のパケット受信比をもつ受信機を選択する。図14の例では、E2≧E1≧E3≧E4の関係があるので、受信比E2をもつ受信機S2が選択される。制御機Cは、選択した受信機S2に対して、周期時間Tの経過する間、制御信号「High」を出力する。また、残りの受信機S1、S3、S4に対して、制御信号「Low」を出力する。これにより、代表受信機以外の受信機は、送信マスク状態におかれる。代表受信機は、双方向通信により、制御のための通信を行う。
【0126】
上記の例では、最大のパケット受信比をもつ受信機が選択されたが、本発明はこれに限定されない。例えば、制御機Cは、所定のしきい値以上のパケット受信比を持つ受信機の中で、最も進行方向寄りの受信機1台を選択してもよい。この構成によれば、より長い間、代表受信機を変更しないでよいという利点が得られる。
【0127】
図15は、代表受信機の選択と、それに応じた制御のタイミングを説明する図である。図15のように、受信機Siは、送信機Mからパケットを受信後(S151)、(T1+T2)時間後までにパケット受信比を算出する(S152)。次に、制御機Cへ画像データおよび音声データの同期パケットを出力し終えてから(S153)、算出したパケット受信比をコントローラに対して非同期データで送信する(S154)。このパケット受信比が制御機Cに到達する時間をT2時間後とすると(S155)、制御機にパケット受信比が到達するのは、送信機Mが同期パケットを送信してから(T1+2×T2)時間後となる。ここで、例えば、周期時間Tと比較して、(T1+2×T2)時間がT/2となるように設定すれば、周期Tの残り時間(T−(T1+2×T2))で、各受信機に対して図14の制御信号を出力するのに十分な時間が確保される。この制御信号に従って、各受信機は制御信号がHighであれば送信可能となる。制御信号がLowであれば、送信不可となり、送信がマスクされる。
【0128】
以上に説明したように、本実施の形態では、代表受信機が選択され、代表受信機が送信機と双方向通信を行う。残りの受信機は、一方向通信を行う。これにより、送信機は、複数の受信機の存在を考慮しなくてよい。したがって、移動体通信が簡素な構成で行われる。本実施の形態は、電車の例で示したように、配列された複数の受信機で移動体と通信する場合に、一つの受信機にだけ双方向通信を行うことで、通信システムを簡素化でき、有利である。
【0129】
また、本実施の形態では、代表受信機をパケット受信比の大きさに基づいて選択することで、より確実な通信を行える代表受信機を選択できる。また、進行方向寄りの受信機を代表受信機に選ぶことで、より長い間、代表受信機を変更しないでよいという利点が得られる。
【0130】
また、本実施の形態では、送信機Mが同期制御を行っている。これは、以下の点で有利である。仮に、複数の受信機の一つが同期制御を行ったとする。この場合、同期をとるための受信機の信号が送信機に届かないことがあり得る。例えば、マルチパスの影響で、信号が届かない場合がある。これに対して、送信機が同期のための信号を送る場合、複数の受信機が信号を受けるので、少なくとも一つの受信機が信号を受け取れる可能性が高い。例えば、マルチパスの影響で列車近くの受信機が信号を受け取れないようなときでも、別の受信機が信号を受け取れる。この点で、送信機が同期制御を行うと、同期を確実にとれるという利点がある。
【0131】
また、本実施の形態では、パケット受信比を用いたが、本発明はこれに限定されない。受信状態または通信状態を示す他のパラメータ、例えば、電界強度RSSI値が用いられても良い。この点は、上述のパケット合成の処理と同様であり、また以下の処理でも同様である。
【0132】
「初期化シーケンス」(システムIDの登録、無線チャネル通知)
次に、本システムの初期化シーケンスを説明する。ここでは、システムIDのデータベースへの登録と、無線チャネル通知が行われる。
【0133】
既に説明したように、各列車は、固有の列車番号(列番)を有している。一編成の列車の列番は、始発駅を列車が発車するときに湧き出す(初期設定)。列番は、運行スケジュールであらかじめ設定されている番号である。例えば、xx時xx分発の列車の列番はxxと、ダイヤ上で予め決められている。
【0134】
列番が湧き出すとき、すなわち列車が始発駅を発車するとき、本システムでは、以下のようにして、システムIDが列番・システムIDデータベースDB2に登録される。また、無線チャネルが以下のようにして初期化される。
【0135】
図16を参照すると、本実施の形態では、始発駅に初期設定登録用専用受信機S0が設置されている。初期設定登録用専用受信機S0は、最初の閉塞区間の制御機Cに接続されている。図16では、上位制御機Csは省略されている。また、指令所DCは監視センタMCに一体化されており、指令所DCも図から省略されている。
【0136】
列番の湧出しは、上述のように、駅に停車中の列車が動き出す時である。図16に示されるように、駅Aに停車中の電車に電源が投入されると、列車の送信機Mは、システムIDを無線で初期設定登録用専用受信機S0に対して送信する(S161)。初期設定登録用専用受信機S0は、制御機Cに対して有線でシステムIDを送信する(S162)。制御機Cは、監視センタMCに対して、システムIDに加えて閉塞区間番号を送信する(S163)。監視センタMCに一体化された指令所DCでは、列番・システムIDデータベースDB2にシステムIDが登録される。すなわち、システムIDが取得されると、そのシステムIDが、湧き出した列番とともに列番・システムIDデータベースDB2に記録される。
【0137】
なお、湧出した列番は、監視センタMCでは、運行管理システムにより把握されている。運行管理システムは、運行スケジュールに従って発車する列車の列番を検出する。この列番の情報は、列番・閉塞区間データベースDB1にも登録される。
【0138】
また、登録されたシステムIDは、単位通信網を構成する受信機に通知される。通知対象は、図16に示されるパターン1またはパターン2の受信機である。この処理については後述する。
【0139】
次に、図17は、初期設定における無線チャネル通知のシーケンスを示している。
【0140】
まず、送信機Mが搭載されている車両の電源が投入され、送信機Mは、出発信号を検出する。この出発信号により送信機Mは、初期設定登録用専用受信機S0にポーリング信号AsPOLLを送信する(S171)。また、これとは別に、監視センタMCは制御機Cからのポーリング信号AsPOLLに従って、制御機Cに対して無線チャネル通知を送信する(S172)。制御機Cは、初期設定登録用専用受信機S0からのポーリング信号AsPOLLに従って、初期設定登録用専用受信機S0へ無線チャネル通知を送信する(S173)。次に、送信機Mからのポーリング信号AsPOLLに従って、初期設定登録用専用受信機S0は送信機Mに対して無線チャネル通知を送信する(S174)。その後、送信機M、初期設定登録用専用受信機S0、共に無線チャネルを変更して、一定時間Taが経過するのを待つ。以上の動作で無線チャネルの設定が行われる。
【0141】
一定時間Taの設定は、送信機M、初期設定登録用専用受信機S0が共に独自で同一時間の周期Tを刻んでいるので、この周期時間Tの整数倍とすればよい。例えば、通常は、時間Taを1T時間に設定し、伝送エラーが発生している時には、時間Taを3T時間から4T時間に設定すれば十分である。
【0142】
次に、図18は、システムID登録のシーケンスを示している。まず初めに列番湧出しが起こり、図17の動作が行われた後に、図18のシーケンスに移る。送信機Mは、システムIDを無線で初期設定登録用専用受信機S0に対して送信する(S181)。初期設定登録用専用受信機S0は、システムIDの受信後に、システムIDを受け取ったことを示すACK信号を返送する(S182)。続いて初期設定登録用専用受信機S0、制御機Cに対して有線でシステムIDを送信する(S182)。同様に制御機CはACK信号を返す。次に、制御機Cは監視センタMCに対して、受信したシステムIDに加えて閉塞区間番号を合わせて送信する(S183)。監視センタMCはACK信号を返す(S184)。その後、監視センタMCは、受信したシステムIDを、列番・システムIDデータベースDB2に登録する(S184)。また、列番・閉塞区間データベースDB1でも湧き出した列番が登録される。
【0143】
その後、制御機Cから任意のタイミングでポーリング信号AsPOLLが送信されてくる。監視センタMCは、列番・閉塞区間データベースDB1、列番・システムIDデータベースDB2への登録が完了していれば、システムIDの登録完了を示す信号を返す(S185)。同様に、制御機Cには、初期設定登録用専用受信機S0からも任意のタイミングでポーリング信号AsPOLLが送信されてくる。監視センタMCからシステムID登録完了の通知が返ってきた後にポーリング信号AsPOLLを受信したとき、制御機Cは、初期設定登録用専用受信機S0に対してシステムID登録完了を返す(S186)。次に、初期設定登録用専用受信機S0は、送信機Mからのポーリング信号AsPOLLに従って、送信機Mに対してシステムID登録完了を返す(S187)。以上のようにしてシステムID登録完了を送信機Mが受け取った時点で、初期設定が完了となる。
【0144】
ここで、一定時間Tbが経過するまでにS187のシステムID登録完了が返ってこない場合、タイムアウトとなり、送信機Mは図17のAへ、初期設定登録用専用受信機S0は図17のBへ戻る。
【0145】
一定時間Tbの設定については、送信機Mおよび初期設定登録用専用受信機S0が共に独自に同一時間の周期Tを刻んでいるので、一定時間Tbは周期時間Tの整数倍とすればよい。例えば、通常は、時間Tbを1T時間に設定し、伝送エラーが発生している時には、時間Tbを3T時間から4T時間に設定すれば十分である。
【0146】
また、上記の説明では、送信機と受信機の間の通信、受信機と制御機の間の通信、制御機と監視センタの間の通信では、同一の送信要求信号AsPOLL、ACK信号が用いられているが、同一の信号が用いられなくてもよい。
【0147】
次に、監視センタMCから各受信機に対してシステムIDを通知する処理について説明する。システムIDは、監視センタMCから制御機Cを経由して受信機に通知される。
【0148】
ここでは、通知に関して2つのパターンを説明する。図8を参照すると、第1のパターンは、パケット合成のために選択される受信機に対してシステムIDを通知する。前述のパケット合成の説明で述べたように、パケット合成では、パケット受信比に基づき、パケット採用条件を満たす受信機が選択される。この情報が第1のパターン1で利用される。一方、第2のパターンでは、閉塞区間(駅間)のすべての受信機に対して同じシステムIDが通知される。
【0149】
図19を参照し、上記の第1のパターン(図16)におけるシステムの動作を説明する。制御機Cは、監視センタMCに対してシステムID要求を出す。これを受信すると、監視センタMCは、列番・システムIDデータベースDB2と列番・閉塞区間データベースDB1を検索して、制御機Cに対してシステムIDの通知を行う(S191)。制御機Cに制御される閉塞区間に対応する列番が検索され、その列番に対応するシステムIDが検索される。
【0150】
制御機Cは、パケット合成で説明したように、各受信機から得られるパケット受信比の情報を基に、パケットの採用条件を満たす受信機を選択している。前述の例では、パケット受信比がしきい値以上であるとき、採用条件が満たされ、そのような受信機が受信したパケットを使って合成処理が行われる。この合成のために選択された受信機へと、制御機CからシステムIDが通知される(S192)。この通知は、受信機Sからのポーリング信号AsPOLLに応えて行われる。
【0151】
次に、第2のパターン(図16)におけるシステムの動作を説明する。列車の運行は、ある閉塞区間では、必ず1編成の列車が運行されるように設定されている。これを利用して、制御機Cは、閉塞区間のすべての受信機に対して同一のシステムIDを通知する。第2のパターンにおける通知のシーケンスは、図19と同様である。
【0152】
次に、図20を参照し、システムIDの通知に関する別の構成を説明する。前述の処理では、監視センタMCから制御機Cを介して受信機にシステムIDが通知された。図20のシーケンスでは、監視センタMCからではなく、制御機CからシステムIDが通知される。この例では、列番・システムIDデータベースDB2は制御機Cにより管理される。
【0153】
図20は、列番・システムIDデータベースDB2にシステムIDを登録するためのシーケンスを示している。送信機Mは、初期設定登録用専用受信機S0に対してシステムIDを送信する(S201)。続いて、初期設定登録用専用受信機S0は、制御機Cに対してシステムIDを送信する(S202)。制御機Cは、初期設定登録用専用受信機S0から受け取ったシステムIDを列番・システムIDデータベースDB2へ登録する(S203)。制御機Cでの登録が完了した後、初期設定登録用専用受信機S0からのポーリング信号AsPOLLに従って、システムID登録完了が初期設定登録用専用受信機S0へ送信される(S204)。続いて、初期設定登録用専用受信機S0は、送信機Mからのポーリング信号AsPOLLに従って、システムID登録完了を送信機Mに対して送信する(S205)。送信機MがシステムID登録完了を受信後、システムID登録が完了となる。ただし、既に説明した通り、一定時間Tb内にシステムID登録完了が受信されなければ、タイムアウトとなり、送信機Mは図17のAへ、初期設定登録用専用受信機S0は図17のBへ戻る。
【0154】
図21は、図20により登録されたシステムIDを受信機へ通知するためのシーケンスを示している。図示のように、受信機Sから制御機CへシステムID要求が出されると、制御機Cは、列番・システムIDデータベースDB2を検索して、受信機Sに対してシステムIDの通知を行う(S211)。通知対象の受信機は、上述の第1のパターンまたは第2のパターンに従う。第1のパターンでは、受信機からのパケット受信比が用いられ、任意の複数の受信機へシステムIDが通知される。具体的には、パケット合成処理のために選択された受信機へとシステムIDが通知される。第2のパターンでは、同一閉塞区間で制御機Cに繋がるすべての受信機に対してシステムIDが通知される。
【0155】
次に、図22は、閉塞区間を列車が跨ぐときのシステムID通知のシーケンスを示している。ここでは、監視センタMCから受信機SへシステムIDが通知される。監視センタMCは前述のように指令所DCと一体化されている。監視センタMCは、指令所DCの機能を利用して、秒単位で列番の位置を管理している。そこで、ある列番の列車が閉塞区間を跨ぐことが分かったとき、その列番のシステムIDが検索される(S221)。そして、制御機Cからのポーリング信号AsPOLLを待って、システムIDが制御機Cへ通知される(S222)。制御機Cは、自身に繋がっている受信機Sに対してシステムIDを通知する(S223)。ここでも、ポーリング信号AsPOLLに応えてシステムIDが通知される。また、通知対象の受信機は、上述の第1のパターンまたは第2のパターンに従う。第1のパターンでは、受信機からのパケット受信比が用いられ、任意の複数の受信機へシステムIDが通知される。パケット合成処理のために選択された受信機へとシステムIDが通知される。第2のパターンでは、同一閉塞区間で制御機Cに繋がるすべての受信機に対してシステムIDが通知される。受信機Sは、受け取ったシステムIDを使って送信機Mと通信する。
【0156】
以上に説明したように、本実施の形態では、初期設定登録専用受信機が設けられ、この専用受信機が、列番の湧き出しのときにシステムIDを取得し、このシステムIDが列番・システムIDデータベースDB2に登録される。そして、システムIDは、各単位通信網、すなわち上記実施の形態では閉塞区間での通信のために提供される。このようにして、各単位通信網で、そこに位置する列車上の送信機と円滑に通信が行える。
【0157】
「受信機の配置」
次に、図23を参照して、本システムに見られる受信機の好適な配置を説明する。図23では、閉塞区間Aと閉塞区間Bが並んでいる。閉塞区間Aには、受信機SAi(i=1〜6)が配置されており、それらは1台の制御機CAの制御下にある。これら1台の制御機CAと複数の受信機SAiにより単位通信網(A系)が構成されている。
【0158】
同様に、閉塞区間Bには受信機SBi(i=1〜4)が配置されており、それらは1台の制御機CBの制御下にある。そして、制御機CBと複数の受信機SBiにより単位通信網(B系)が構成されている。そして、制御機CAおよび制御機CBは、上位制御機Csにより制御される。
【0159】
また、図23では、その特徴として、異なる制御機CA、CBの制御下にある受信機SA6と受信機SB1が、同じ位置または近くに配置されている。
【0160】
本システムの動作を説明すると、列車上の送信機Mは、どの閉塞区間に位置するかに関係なく、画像および音声の同期データを連続的に送信している。列車が閉塞区間Aにいるときは、送信機Mと受信機SAiの間で通信が行われ、同期データは制御機CAから上位制御機Csを経由し、監視センタMCに送られる。閉塞区間Bでも同様であり、同期データが制御機CBから上位制御機Csを経由し、監視センタMCへ送られる。
【0161】
制御機CAと制御機CBの切替えは、上位制御機Csにて、列番の位置情報に基づいて行われる。この構成では、例えば、ある列番の列車が閉塞区間Aから閉塞区間Bへと移ったことを示す信号が上位制御機Csに入力される。列番の位置情報は、既に説明したように、運行管理システムで検知された情報でよい。列番の位置する区間が変わったことが検知されると、上位制御機Csは、制御機CAから制御機CBへの切替えを行う。
【0162】
上記の動作では、閉塞区間Aの最後の受信機SA6から閉塞区間Bの最初の受信機SB1に列車が移るとき、上位制御機Csは、制御機CAと制御機CBを切り替える。このとき、上位制御機Csは、列車の位置情報に基づき切り替えを行う。このハンドオーバの時間が、図23の配置によれば、受信機SA6と受信機SB1を同位置または近傍に配置したことにより、十分に長くとることができ、これにより、切替えの際の画質等の改善が図れる。
【0163】
図24は、制御機CAの下の受信機SA6と制御機CBの下の受信機SB1が同じ位置または近い位置に配置される場合のパケット受信比の変化を示している。横軸は、列車の位置であり、縦軸はパケット受信比である。図示のように、列車が近づいてくると、受信機SA6および受信機SB1の受信状況がほぼ同時に良くなる。時速が200km/hであり、受信機間隔が500mであるとすると、受信状況が良い時間Tcは9秒である。この時間Tc内に上位制御機Csは制御機CAと制御機CBを切り替える。したがって、ハンドオーバを行うのに十分な時間を取ることができる。
【0164】
次に、図25は、制御機の切替え処理の別の例を示している。上記の説明では、制御機の切替えが列車の位置情報に基づいて行われたのに対して、図25では、制御機がパケット受信比に応じて切り替えられる。
【0165】
既に説明したように、図25において、上位制御機Csが制御機CAおよび制御機CBを制御しており、制御機CAが受信機SA6を制御し、制御機CBが受信機SB1を制御する。受信機SA6と受信機SB1は、受信状況が良好な期間が重なるように、同位置または近傍に配置されている。
【0166】
図25の動作としては、まず、送信機Mから音声および画像データの同期パケットが送信される(S251)。受信機SA6、SB1は、受信したデータからパケット受信比EA6、EB1を算出する。
【0167】
受信機SA6は、算出したパケット受信比EA6を制御機CAに出力する(S252)。制御機CAには、接続されている他の受信機SA1〜SA5からもパケット受信比EA1〜EA5が出力されてくる。ここで、取得される6つのパケット受信比が、EA6≧EA5≧EA4≧EA3≧EA2≧EA1の関係を有するとする。制御機CAは、最大のパケット受信比EA6を選択し、このパケット受信比EA6を上位制御機Csに対して出力する(S253)。
【0168】
同様に、受信機SB1は、算出したパケット受信比EB1を制御機CBに出力する(S254)。制御機CBには、接続されている受信機SB2〜SB4からもパケット受信比SB2〜SB4が出力されてくる。ここで、取得される4つのパケット受信比が、EB1≧EB2≧EB3≧EB4の関係を有するとする。制御機CBは、最大のパケット受信比EB1を選択し、このパケット受信比EB1を上位受信機Csに対して出力する(S255)。
【0169】
上位制御機Csは、制御機CA出力されたパケット受信比EA6と制御機CBから出力されたパケット受信比EB1を比較する(S256)。ここで、EB6≦EB1の関係があるとする。これは、列車の移動に伴い、受信機SB1の受信状況が良くなったことを示している。
【0170】
そこで、上位制御機Csは、より大きいパケット受信比EB1を出力した制御機CBに対して以下の制御を行う。すなわち、上位制御機Csは、制御機CBが受信機に対して出力する制御信号をHighにするように、制御機CBを制御する。
【0171】
この制御信号は、既に説明したように、複数の受信機の一つに送信機と双方向通信を行わせるための信号である。そこで、制御機CBは、最大のパケット受信比EB1を出力する受信機SB1に、Highの制御信号を出力する(S257)。図示されないが、既に説明したとおり、残りの受信機SB2〜SB4へはLowの制御信号が出力される。
【0172】
また、上位制御機Csは、小さいパケット受信比EA6を出力した制御機CAに対しては以下の制御を行う。すなわち、上位制御機Csは、制御機CAが全受信機に対してLowの制御信号を出力するように、制御機CAを制御する。これに応えて、制御機CAは、受信機SA1〜SA5へ、また、受信機SA6へもLowの制御信号を送る(S258)。
【0173】
以上のようにして制御信号が出力されると、各受信機SA6、SB1は、送信機Mへの送信が可能か否かを、入力された制御信号に従って判定する。制御信号がHighであれば、送信可能であると判定される。制御信号がLowであれば、送信がマスクされている(送信不可)と判定される。こうして、受信機SA6から受信機SB1への切り替え、すなわち、制御機CAから制御機CBへの切替が行われる。
【0174】
次に、図26を参照すると、この例でも、図23と同様に、閉塞区間Aと閉塞区間Bが並んでいる。閉塞区間Aには、受信機SAi(i=1〜5)が配置されており、それらは1台の制御機CAの制御下にある。これら1台の制御機CAと複数の受信機SAiにより単位通信網(A系)が構成されている。
【0175】
同様に、閉塞区間Bには受信機SBi(i=1〜4)が配置されており、それらは1台の制御機CBの制御下にある。そして、制御機CBと複数の受信機SBiにより単位通信網(B系)が構成されている。
【0176】
制御機CAおよび制御機CBは、上位制御機Csにより制御される。制御機CAから制御機CBへの切替えは、図23を用いて説明したように、列車の位置情報に基づいて行われる。また、モニタへの画像出力の切替えは、前述のように、監視センタMCで行われる。すなわち、列車が閉塞区間Aから閉塞区間Bへ移ると、監視センタMCのスイッチャが、制御機CBから得た同期データをモニタへ出力する。
【0177】
以上のように、図26では、閉塞区間毎に制御機が完全に独立に配置される。これにより、閉塞区間Aと閉塞区間Bの間のいわゆるハンドオーバを行う必要がなくなる。これは、監視センタMCが制御機Cを制御する必要がないことを意味する。監視センタMCは上述したような映像の切替えのみを行えばよい。そして、上位制御機Csが、繋がっている制御機CAと制御機CBの切替を行えばよい。無線系で考えると、制御機CA、CB、受信機SA1〜SA5、SB1〜SB4、送信機Mの間で制御が行われればよい。このようにして、本実施の形態によれば、制御構成が簡素化する。
【0178】
次に、図27を参照する。図27の構成例では、一つの閉塞区間Aに複数の制御機CA、CBが配置され、制御機CAの下に受信機SAi(i=1〜5)が位置し、制御機CBの下に受信機SBi(i=1〜4)が位置している。これにより、一つの閉塞区間A内で2つの単位通信網(A系、B系)が隣接する。
【0179】
閉塞区間Aの全制御機、この例では制御機CAおよび制御機CBは、上位制御機Csにより制御される。制御機CAと制御機CBの切替は、上位制御機Csが行う。ここでは、パケット受信比に基づき制御機が切り替えられる。この切替動作は、原理的には、図25の切替動作と同じである。
【0180】
具体的には、各制御機は、配下の複数の受信機のパケット受信比を保持している。制御機CAに繋がっている受信機SAi(i=1〜5)のパケット受信比が制御機CAに保持され、制御機CBに繋がっている受信機SBi(i=1〜4)のパケット受信比が制御機CBに保持されている。制御機CAおよび制御機CBの保持する最大のパケット受信比が比較される。上位制御機Csは、より大きいパケット受信比を保持する制御機を選択する。
【0181】
例えば、制御機CAのパケット受信比が制御機CBのパケット受信比よりも大きいとする。この場合には、上位制御機Csは制御機CAを選択する。逆の場合は、制御機CBが選択される。
【0182】
以上の構成によっても、上位制御機Csから上の監視センタMCは、上位制御機Cs以下の無線系の構成を制御する必要が無く、映像の切替のみを行えばよい。したがって、制御システムが簡素でよい。また、図27の構成は、閉塞区間が長いときなどに、受信機と制御機の距離を短くでき、コスト面で有利である。
【0183】
「空きチャネル探索」
次に、本システムの空きチャネル探索処理について説明する。空きチャネル探索は、全部の受信機に対して空きチャネル、すなわち、使用可能なチャネルを問い合わせる処理である。各受信機は、全部のチャネル、例えば、10のチャネルをサーチし、例えばノイズレベルに基づいて空きチャネルを検出し、制御機へ報告する。
【0184】
また、空きチャネル探索は送信機でも行われる。送信機は、空きチャネル探索モードの受信機から空きチャネル探索を指示される。空きチャネル探索は、通信相手の受信機、すなわち、既に説明した送信マスク状態にない受信機から指示される。これを受けて、一定時間、通信が中断される。この間に送信機は、例えばノイズに基づいて空きチャネルをサーチする。一定時間が経過すると、通信が再開され、空きチャネルが受信機に通信で報告される。空きチャネルは、受信機から制御機へ報告される。
【0185】
以上の空きチャネル探索に関して、本システムは、探索優先モードと映像優先モードを切替可能に構成されている。探索優先モードは、監視センタMCでの監視者による操作盤の操作に従って設定される。そして探索優先モードでは、空きチャネル探索が優先される。すなわち、探索優先モードでは、監視者の意志を優先して、空きチャネル探索が実行される。
【0186】
監視者の操作に従って探索優先モードが設定されていないときは、映像優先モードが設定されている。映像優先モードでは、監視画像の通信が優先され、空きチャネル探索は行われなくてよい。
【0187】
以下、空きチャネル探索のコマンドと同期データ(画像および音声のデータ、Isoデータ(Isochronousデータ)ともいう)の通信シーケンスを用いて、2つのモードの空きチャネル探索を説明する。
【0188】
図28は、探索優先モードでのシーケンスを示している。図28の図面では上位制御機Csが省略されており、図28の説明において上位制御機Csは監視センタMCの一部と考えてよい。そして、図28の例では、監視センタMCからの空きチャネル探索要求が、送信機Sからの同期データよりも遅れて受信機Sに到達する。
【0189】
図28に示すように、通常時は、送信機Mから受信機Sに向けて同期データが送信される(S281)。受信機Sは同期データを制御機Cに送信する(S282)。
【0190】
一方、監視センタMCの監視者は、送信機M、受信機Sおよび制御機Cのタイミングとは無関係に、空きチャネル探索の実行を指示する(S283)。そして、制御機Cからのポーリングに従って、監視センタMCから空きチャネル探索コマンドが送信される(S284)。
【0191】
ここで、受信機S、制御機Cのそれぞれが独自の周期を刻んでいるので、受信機Sで同期データが到達するタイミングと空きチャネル探索コマンドが到達するタイミングの関係は一定ではない。図28の例では、先に同期データが到達して、それから空きチャネル探索コマンドが到達する。
【0192】
この場合、まず、制御機Cは、上述のように、受信機Sから同期データを受信する(S282)。次に、制御機Cは、受信機Sからのポーリングを待って、受信機Sに対して空きチャネル探索コマンドを送信する(S285)。この例では、監視センタMCの監視者の意志を優先する探索優先モードが設定されているので、制御機Cは、受信機Sから受信した同期データを破棄して、空きチャネル探索モードに入る(S286)。さらに、受信機Sも空きチャネル探索モードに入る(S287)。
【0193】
図29は、送信機Mからの同期データが制御機Cからの空きチャネル探索コマンドよりも後に受信機Sに到達する場合のシーケンスを示している。ここでも探索優先モードが設定されている。
【0194】
図29では、まず、監視センタMCの監視者の操作に従い、送信機M、受信機Sおよび制御機Cのタイミングに関係なく、空きチャネル探索の実行が指示される(S291)。続いて、監視センタMCは、制御機Cからのポーリングに従って空きチャネル探索コマンドを制御機Cに送信する(S292)。そして、制御機Cは、受信機Sからのポーリングに従って空きチャネル探索コマンドを受信機Sに送信する(S293)。制御機は、受信機Sに対して空きチャネル探索コマンドを送信後に、空きチャネル探索モードに入る(S294)。また、受信機Sは、空きチャネル探索コマンドを受信後に空きチャネル探索モードに入る(S295)。
【0195】
この後、受信機Sは送信機Mから同期データを受信する(S296)。しかし、受信機Sは、既に空きチャネル探索モードに入っているので、受信した同期データを破棄する(S297)。
【0196】
図30は、送信機Mからの同期データが制御機Cからの空きチャネル探索コマンドと同時に受信機Sに到達する場合のシーケンスを示している。
【0197】
図30では、まず、監視センタMCの監視者の操作に従い、送信機M、受信機Sおよび制御機Cのタイミングに関係なく、空きチャネル探索の実行が指示される(S301)。続いて、監視センタMCは、制御機Cからのポーリングに従って空きチャネル探索コマンドを制御機Cに送信する(S302)。そして、制御機Cは、受信機Sからのポーリングに従って空きチャネル探索コマンドを受信機Sに送信する(S303)。制御機は、受信機Sに対して空きチャネル探索コマンドを送信後に、空きチャネル探索モードに入る(S304)。
【0198】
受信機Sは、空きチャネル探索コマンドと同期データを同時に受信する(S303、S305)。この例では、監視センタMCの監視者の意志を優先する探索優先モードが設定されているので、送信機Mからの同期データは破棄され、受信機Sは空きチャネル探索モードに入る(S306)。
【0199】
本システムは、以上のようなシーケンスにより、空きチャネル探索優先でシステムを動作させることができる。
【0200】
次に、図31は、映像優先モードのシーケンスを示している。この映像優先モードでは監視映像の表示が優先される。
【0201】
図31では、まず、監視センタMCの監視者の操作に従い、送信機M、受信機Sおよび制御機Cのタイミングに関係なく、空きチャネル探索の実行が指示される(S311)。続いて、監視センタMCは、制御機Cからのポーリングに従って空きチャネル探索コマンドを制御機Cに送信する(S312)。さらに、制御機Cは、受信機Sからのポーリングに従って空きチャネル探索コマンドを受信機Sに送信する(S313)。制御機は、受信機Sに対して空きチャネル探索コマンドを送信後に、空きチャネル探索モードに入る(S314)。
【0202】
受信機Sは、空きチャネル探索コマンドの受信後に同期データを送信機Mから受信する(S315)。映像優先モードが設定されているので、受信機Sは、空きチャネル探索コマンドを破棄する(S316)。そして、受信機Sは、同期データを制御機Cに送信する(S317)。制御機Cは、同期データを受信した後に、空きチャネル探索モードから通常モードに入る(S318)。通常モードは、同期データを通信するモードである。以上のシーケンスにより、監視画像表示優先でシステムを動作させることができる。
【0203】
以上に、本システムの空きチャネル探索処理を説明した。上述のように、本システムでは、探索優先モードと通信優先モードが切り替えられる。監視者の操作に従って探索優先モードが設定されていないときは、通信優先モードが設定される。通信優先モードでは、映像等のデータ通信が優先される。このようにして、通常は空きチャネル探索を抑制し、データ通信時間をできる長くし、データ通信量を多くするとともに、必要に応じて空きチャネル探索を優先させることができる。
【0204】
本実施の形態の如く、列車のような移動体の運行システムに本発明が適用されるとき、通常はデータ通信が優先されるべきである。しかし、マルチパスなどが各受信機の通信状態に悪影響し、しかも、このような悪影響が一定ではない。そのため、システム保守の一環として空きチャネル探索を行って映像が得られる状態を確保することも必要である。このような場合に、本実施の形態の優先モード切替式の空きチャネル探索が有用である。
【0205】
「受信機による網同期制御」
次に、受信機による網同期制御を説明する。上述の実施の形態では、送信機がシステムの網同期を制御している(図14)。これに対して、本実施の形態では、受信機が網同期を制御する。そのために、受信機がポーリングを発行してから送信機が信号を送信する。
【0206】
図32のデータフローを参照すると、システムの網同期は、以下に説明するように、受信機S1により行われる。まず受信機S1が、一定時間で定義される周期時間Tの先頭でポーリング信号を送信機Mに向けて送信する(S321)。送信機Mは、ポーリング信号を受信後、画像データおよび音声データの同期データを受信機S1に向けて送信する(S322)。受信機S1は、同期データを受信後、次に非同期データ要求である非同期ポーリング信号を送信機Mに向けて送信する(S323)。送信機Mは非同期ポーリング信号を受信後、非同期データを受信機S1に向けて送信する(S324)。
【0207】
上記のようにして、図32では、受信機S1がデータ送信要求であるポーリングを送信する。ただし、本システムでは、複数の受信機S1〜S4が存在しているので、図32のように1台の受信機のみに送信許可が与えられる必要がある。複数の受信機が信号を送信した場合にはデータの衝突が発生してしまうからである。この送信許可の制御は、図14で説明したようにして行われればよい。ここでは、最大のパケット受信比をもつ受信機を代表に選択する場合を説明する。
【0208】
図32に示されるように、まず、各受信機S1〜S4が画像データを受信後にパケット受信比を算出する(S325)。算出したパケット受信比が制御機Cに送信される。制御機Cは、入力されたパケット受信比を比較し、最大のパケット受信比を送ってきた受信機を選択する(S326)。この例では、受信機S2が選択される。制御機Cは受信機S1〜S4に制御信号を送る。このとき、選択された受信機S2には、High信号が出力される。出力期間は、一定時間で定義される周期時間Tである。残りの受信機S1、S3、S4にはLow信号が出力される。
【0209】
このような制御信号を受けて、次の周期では、図示のように、受信機S2が、代表受信機として送信機Mと通信し、網同期を行う(S327〜S330)。受信機S1、S3、S4では送信がマスクされる。
【0210】
以上に、受信機側での網同期のシーケンスを説明した。本実施の形態では、網同期を行う構成が、移動体側ではなく、固定側(インフラストラクチャ側)にあり、これにより、網同期がより確実に行えるという利点が得られる。
【0211】
以上、本発明に好適な実施の形態を説明した。本実施の形態によれば、図14を参照して説明したように、複数の制御側通信機から代表通信機が選択され、代表通信機が移動通信機と双方向通信を行い、残りの制御側通信機は、移動通信機が発する信号を受信する一方向通信を行うので、複数の制御側通信機の存在を移動通信機が考慮せずともよく、1対多の移動体通信が比較的簡単に実現でき、このシステムを利用して画像等の送信も可能になる。
【0212】
また、制御機が、複数の制御側通信機の各々の通信状態に基づいて代表通信機を選択するので、より確実な通信を行える代表受信機を選択できる。
【0213】
また、本実施の形態によれば、図12および図13を参照して説明したように、移動通信機が一連のパケットを送信したとき、制御機が、複数の制御側通信機から得られるパケット群から一連のパケットを再構成するので、一連のパケットを確実に得ることができる。制御側通信機が一つであると、マルチパス等の影響で一部のパケットが抜け落ちる可能性があるのに対して、本発明によれば、パケットが抜けるのを比較的簡易な構成で効果的に防止できる。
【0214】
また、パケット群に複数の同一のパケットが含まれるときに、制御機が、複数の同一のパケットの各々を受信した制御側通信機の通信状態に基づいて一つのパケットを選択するので、良好な通信状態で受信されたパケットを採用することができ、画像等のデータの品質を確保できる。
【0215】
また、制御機が、所定の期間内に前記複数の制御側通信機が受信したパケット群から一連のパケットを取得するので、異なる一連のデータのパケットの混同が避けられる。そして、混同を防止するための処理が不要なので、処理の簡素化を図れる。
【0216】
また、本実施の形態によれば、図26および図27を参照して説明したように、制御機と複数の制御側通信機により単位通信網が構成され、通信領域が隣接するように複数の単位通信網が設けられるので、列車等の細長い区間を移動する移動体システムに対して移動通信システムを好適に適用可能である。
【0217】
また、複数の制御機を制御する上位制御手段が設けられ、上位制御手段が、移動通信機の位置情報に基づいて、移動通信機と通信すべき単位通信網を切り替える制御を行うので、単位通信網の切替が好適に行われる。そして、上位制御手段から上の構成が上位制御手段以下の構成を制御する必要を無くすことができ、制御システムが簡素でよくなる。
【0218】
また、別の形態では、上位制御手段が、隣接する各単位制御網の制御側通信機の通信状態の情報に応じて、移動通信機と通信すべき単位通信網を切り替える制御を行う。この形態によっても単位通信網の切替が好適に行われる。また、ここでも、上位制御手段から上の構成が上位制御手段以下の構成を制御する必要を無くすことができ、制御システムが簡素でよくなる。
【0219】
また、隣接する単位通信網の通信領域が部分的に重複するように、隣接する異なる単位制御網を構成する複数の制御側通信機が近傍または同一箇所に配置することにより、ハンドオーバを行うのに十分な時間を取ることができ、切替を円滑に行える。
【0220】
また、図14を参照して説明したように、本実施の形態では、移動通信機が周期的に発する信号に応じて複数の制御側通信機と移動通信機との同期が制御される。同期のための信号を複数の制御側通信機で受けるので、例えば、移動通信機に近い制御側通信機がマルチパスの影響で同期の信号を受信できないときでも、他の制御側通信機が受信できる可能性があり、したがって同期をより確実にとれる。
【0221】
また、図16等を用いて説明したように、本実施の形態では、初期設定登録通信機が、移動体識別情報の発生時に移動通信機固有識別情報を取得する。この情報が識別情報データベースに登録され、各単位通信網での通信のために提供される。このようにして、各単位通信網で、そこに位置する移動体上の移動通信機と円滑に通信が行える。
【0222】
以上、本発明の好適な実施の形態を説明したが、上記の実施の形態が、本発明の範囲内で当業者により任意に変形可能なことはもちろんである。
【0223】
【発明の効果】
以上に説明したように、本発明は、複数の制御側通信機を制御する制御機を設け、この制御機が代表通信機を選択し、代表通信機が移動通信機と双方向通信を行い、残りの制御側通信機が、移動通信機の発する信号を受信する一方向通信を行うように構成したので、複数の制御側通信機の存在を移動通信機が考慮せずともよく、1対多の移動体通信が比較的簡単に実現できるという極めてすぐれた効果を有する移動体通信システムを提供することができるものである。
【図面の簡単な説明】
【図1】本発明の実施の形態の移動体通信システム全体を示す図
【図2】本実施の形態の移動体通信システムが設けられる移動システムを示す図
【図3】2つの閉塞区間に着目して移動体通信システムを示す図
【図4】移動体通信システムの送信機の構成を示すブロック図
【図5】移動体通信システムの受信機の構成を示すブロック図
【図6】移動体通信システムの制御機の構成を示すブロック図
【図7】移動体通信システムの上位制御機の構成を示すブロック図
【図8】移動体通信システムの監視センタの構成を示すブロック図
【図9】移動体通信システムの指令所の構成を示すブロック図
【図10】移動体通信システムの変形例を示すブロック図
【図11】移動体通信システムの変形例を示すブロック図
【図12】パケット受信比に基づくパケット合成処理を示す図
【図13】パケット受信比と遅延時間を用いるパケット合成処理を示す図
【図14】代表受信機の選択処理を示す図
【図15】代表受信機の選択処理を示す図
【図16】初期設定でのシステムID登録および無線チャネル通知の処理を示す図
【図17】初期設定における無線チャネル通知のシーケンスを示す図
【図18】システムID登録のシーケンスを示す図
【図19】受信機へのシステムID通知のシーケンスを示す図
【図20】制御機がシステムIDを管理する場合におけるシステムID登録のシーケンスを示す図
【図21】制御機がシステムIDを管理する場合におけるシステムID通知のシーケンスを示す図
【図22】閉塞区間を列車が跨ぐときのシステムID通知のシーケンスを示す図
【図23】異なる制御機に制御される2つの受信機を同位置または近傍に配置する好適な受信機配置を示す図
【図24】異なる制御機に制御される2つの受信機を同位置または近傍に配置したときのパケット受信比の変化を模式的に示す図
【図25】異なる制御機に制御される2つの受信機を同位置に配置したときのパケット受信比に基づく制御機の切替処理を示す図
【図26】1つの閉塞区間に1つの制御機が配置される構成を示す図
【図27】1つの閉塞区間に複数の制御機が配置される構成を示す図
【図28】探索優先モードでの空きチャネル探索において、同期データより空きチャネル探索コマンドが遅れて受信機に到達するときのシーケンスを示す図
【図29】探索優先モードでの空きチャネル探索において、同期データより空きチャネル探索コマンドが先に受信機に到達するときのシーケンスを示す図
【図30】探索優先モードでの空きチャネル探索において、同期データと空きチャネル探索コマンドが同時に受信機に到達するときのシーケンスを示す図
【図31】映像優先モードでの空きチャネル探索のシーケンスを示す図
【図32】受信機による網同期制御処理を示す図
【符号の説明】
MC 監視センタ
DC 指令所
Cs 上位制御機
C 制御機
S 受信機
M 送信機
T 列車
TN 列番
N 単位通信網
WN 無線網
Claims (21)
- 互いに離れて配置される複数の制御側通信機と、
前記複数の制御側通信機に対して相対的に移動する移動通信機と、
前記複数の制御側通信機を制御する制御機と、
を含み、
前記制御機は、前記複数の制御側通信機の一つである代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせることを特徴とする移動体通信システム。 - 前記制御機は、前記複数の制御側通信機の各々の通信状態に基づいて前記代表通信機を選択することを特徴とする請求項1に記載の移動体通信システム。
- 前記制御機は、前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得することを特徴とする請求項1または2に記載の移動体通信システム。
- 前記制御機は、前記複数の制御側通信機により受信されるパケット群に複数の同一パケットが含まれるとき、前記複数の同一パケットの各々を受信した制御側通信機の通信状態に基づいて、前記複数の同一パケットの一つを選択することを特徴とする請求項3に記載の移動体通信システム。
- 前記制御機は、所定の期間内に前記複数の制御側通信機が受信したパケット群から、前記一連のパケットを取得することを特徴とする請求項3または4に記載の移動体通信システム。
- 前記制御機と前記複数の制御側通信機により、前記複数の制御側通信機が網羅する通信領域をもつ単位通信網が構成され、通信領域が隣接するように複数の単位通信網が設けられることを特徴とする請求項1ないし5のいずれかに記載の移動体通信システム。
- 前記複数の単位通信網のそれぞれ設けられた複数の制御機を制御する上位制御手段を有し、前記上位制御手段は、前記移動通信機の位置情報を取得し、前記位置情報に基づいて、前記移動通信機と通信すべき単位通信網を切り替える制御を行うことを特徴とする請求項6に記載の移動体通信システム。
- 前記複数の単位通信網のそれぞれ設けられた複数の制御機を制御する上位制御手段を有し、前記上位制御手段は、隣接する各単位制御網の制御機から、各単位通信網の制御側通信機の通信状態の情報を取得して、取得された通信状態の情報に応じて、前記移動通信機と通信すべき単位通信網を切り替える制御を行うことを特徴とする請求項6に記載の移動体通信システム。
- 隣接する単位通信網の通信領域が部分的に重複するように、隣接する異なる単位制御網を構成する複数の制御側通信機が近傍または同一箇所に配置されていることを特徴とする請求項6ないし8のいずれかに記載の移動体通信システム。
- 前記移動通信機が周期的に発する信号に応じて前記複数の制御側通信機と前記移動通信機との同期が制御されることを特徴とする請求項1ないし9のいずれかに記載の移動体通信システム。
- 前記移動通信機を搭載する移動体の移動初期に移動体識別情報が発生するときに、前記移動通信機に固有の移動通信機固有識別情報を前記移動通信機から通信で取得する初期設定登録通信機と、
前記移動通信機固有識別情報を前記移動体識別情報と共に登録し、それら識別情報を前記移動体が移動するあいだ管理し、各単位通信網に位置する移動通信機との通信のために前記移動通信機固有識別情報を提供する識別情報データベースと、
を含むことを特徴とする請求項1ないし10のいずれかに記載の移動体通信システム。 - 互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置であって、
前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせることを特徴とする通信制御装置。 - 前記複数の制御側通信機の各々の通信状態に基づいて前記代表通信機を選択することを特徴とする請求項12に記載の通信制御装置。
- 前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得することを特徴とする請求項12または13に記載の通信制御装置。
- 前記複数の制御側通信機により受信されるパケット群に複数の同一パケットが含まれるとき、前記複数の同一パケットの各々を受信した制御側通信機の通信状態に基づいて、前記複数の同一パケットの一つを選択することを特徴とする請求項14に記載の通信制御装置。
- 所定の期間内に前記複数の制御側通信機が受信したパケット群から、前記一連のパケットを取得することを特徴とする請求項14または15に記載の通信制御装置。
- 互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置であって、
前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得し、
前記複数の制御側通信機により受信されるパケット群に複数の同一パケットが含まれるとき、前記複数の同一パケットの各々を受信した制御側通信機の通信状態に基づいて、前記複数の同一パケットの一つを選択することを特徴とする通信制御装置。 - 互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機との通信を行わせる通信制御装置であって、
前記移動通信機が一連のパケットを送信したとき、前記複数の制御側通信機により受信されるパケット群から、前記一連のパケットを取得し、
所定の期間内に前記複数の制御側通信機が受信したパケット群から、前記一連のパケットを取得することを特徴とする通信制御装置。 - 互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機と通信を行わせる通信制御方法であって、
前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせることを特徴とする通信制御方法。 - 互いに離れて配置される複数の制御側通信機を制御して、前記複数の制御側通信機に対して相対的に移動する移動通信機と通信を行わせる制御機にて実行される通信制御プログラムであって、
前記複数の制御側通信機の一つを代表通信機として選択し、前記代表通信機に前記移動通信機との間で双方向通信を行わせるとともに、前記代表通信機以外の制御側通信機に、前記移動通信機が発する信号を受信する一方向通信を行わせる処理を前記制御機に実行させることを特徴とする通信制御プログラム。 - 請求項20に記載の通信制御プログラムが格納された、コンピュータにて読取可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081548A JP4187553B2 (ja) | 2003-03-24 | 2003-03-24 | 移動体通信システムおよび通信制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081548A JP4187553B2 (ja) | 2003-03-24 | 2003-03-24 | 移動体通信システムおよび通信制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004289697A JP2004289697A (ja) | 2004-10-14 |
| JP4187553B2 true JP4187553B2 (ja) | 2008-11-26 |
Family
ID=33295077
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003081548A Expired - Fee Related JP4187553B2 (ja) | 2003-03-24 | 2003-03-24 | 移動体通信システムおよび通信制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4187553B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006295628A (ja) * | 2005-04-12 | 2006-10-26 | Mitsubishi Electric Corp | 地上局装置および移動体通信システム |
| JP2007142489A (ja) * | 2005-11-14 | 2007-06-07 | Mitsubishi Electric Corp | 列車無線システム |
-
2003
- 2003-03-24 JP JP2003081548A patent/JP4187553B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004289697A (ja) | 2004-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3164209B2 (ja) | 無線通信システム | |
| US7177708B2 (en) | Method for the automated control of a technical installation and process control system for carrying out said method | |
| JP5984811B2 (ja) | 無線端末の位置の決定のための方法並びにその関連システム及び装置 | |
| JP3868166B2 (ja) | 車両間無線通信システム | |
| JP2011507324A (ja) | 分散スペクトルコグニティブラジオネットワークのチャネル管理方法 | |
| EP0773651B1 (en) | Radio packet communication system capable of avoiding transmission collision | |
| JP4140633B2 (ja) | 通信システム | |
| JP7388690B2 (ja) | ゲートウェイ装置、センサノード、データ収集方法、データ送信方法及びプログラム | |
| JP2015201728A (ja) | 機器制御システム及び機器制御方法 | |
| JP4187553B2 (ja) | 移動体通信システムおよび通信制御装置 | |
| JP4271089B2 (ja) | 無線通信方法および無線通信装置 | |
| JP4049013B2 (ja) | 無線マルチホップネットワークのアクセス制御方法、中継端末及び移動端末 | |
| CN115499624B (zh) | 使用分布式智能的视频监控系统 | |
| JP2019193250A (ja) | スキャンの結果に基づきチャネルを調整する通信方法及び通信システム | |
| CN118764713B (zh) | 救护车多摄像头之间的资源配置寻优方法及系统 | |
| JP2005006285A5 (ja) | ||
| KR100586839B1 (ko) | 신호제어시스템에서 무선통신을 이용한 실시간 교통데이터 수집 방법 | |
| JP5380356B2 (ja) | マルチホップ通信システム | |
| WO2010099658A1 (zh) | 使用无线局域网的移动通信系统及车辆监控系统 | |
| EP1655895A1 (en) | Radio communication method, radio communication terminal accommodating apparatus, and radio communication terminal | |
| JP3601486B2 (ja) | 無線lanシステムとその制御方法 | |
| JP5292082B2 (ja) | ネットワークにおける通信方法 | |
| JP2010245578A (ja) | 映像監視システム | |
| JP2005020113A (ja) | 通信制御方法、および通信システム | |
| JP7805520B2 (ja) | 監視制御装置、通信システム及びローカル無線通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080617 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080723 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080819 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080909 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120919 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130919 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |