JP4155945B2 - 水底清掃・探索方法および同装置 - Google Patents
水底清掃・探索方法および同装置 Download PDFInfo
- Publication number
- JP4155945B2 JP4155945B2 JP2004168161A JP2004168161A JP4155945B2 JP 4155945 B2 JP4155945 B2 JP 4155945B2 JP 2004168161 A JP2004168161 A JP 2004168161A JP 2004168161 A JP2004168161 A JP 2004168161A JP 4155945 B2 JP4155945 B2 JP 4155945B2
- Authority
- JP
- Japan
- Prior art keywords
- water
- cleaning
- diver
- searching
- buoy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Cleaning By Liquid Or Steam (AREA)
Description
(イ)船に当該水底清掃・探索装置1を積載し、清掃・探索水域まで搬送する。
(ロ)清掃・探索水域に到着後、水深を測定する。
(ハ)水深に合わせてロープ30を準備する。ロープ30は、通常、10mのものを複数本準備しておき、水深に応じて接続することができる。
(ニ)ロープ30の下端を碇部材10に連結し、上端をブイ部材20の縦孔21を挿通した状態でウエイト40に連結する。
(ヘ)ブイ部材20とウエイト40を水中に投入する。
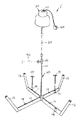
(ト)ダイバーDが水中に潜り、碇部材10を水底Bに固定する。この際、必要に応じて固定部14から固定杭15を水底Bに打込み、碇部材10を強固に固定する。
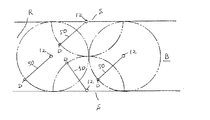
(リ)ダイバーDが、中心垂直棒12を中心にして、そこからリードスケール50の長さの距離を周回泳しながら、その範囲に散在しているゴミを収集したり、水中落下物を探したりする。拾ったゴミ等Tは、ダイバーDのウエストバック状ゴミ収集箱60に入れる。
(ヌ)リードスケール50の長さを徐々に長く(あるいは短く)しながら、中心垂直棒12を中心に周回してゴミを収集する作業を繰り返し、その範囲における作業を終えると、再び、船で次の清掃・探索水域まで移動し、同様の作業を繰り返す。
(甲)透明度の悪い水域であっても、また、潮流が速くても、漏れなく当該水域の水底Bを清掃・探索することができる。
(乙)ダイバーDによって行うので、水生生物の生態系を壊さない。
(丙)潮の干満などで、水深が一定でない水域でもロープ30の長さがウエイト40によって自動的に調節されるため、ブイ部材20が水中に沈んだり、また、潮に流されることがない。従って、清掃・探索作業を確実に行うことができる。これにより、干満の差が4m近くある瀬戸内海のような場所でも問題なく作業を行うことができる。
(丁)碇部材10は、船から投入した後、4本の貫通パイプ13により水流を発生させて平衡姿勢を保ちながら水底Bに着底させることができ、また、水の流れが速い場合には固定杭15を水底Bに打ち込み、碇部材10が動かないようにすることができるので、清掃・探索作業をより確実なものとすることができる。
10 碇部材
11 水平板材
12 中心垂直棒
13 貫通パイプ
14 固定部
15 固定杭
16 回転部材
20 ブイ部材
21 縦孔
30 ロープ
40 ウエイト
50 リードスケール
60 ゴミ収集箱
B 水底
D ダイバー
R 川
S 川岸
T ゴミ
立設角度 α
Claims (3)
- ダイバー(D)によって水底(B)を清掃・探索する方法であって、水底に不動に載置し,下向きに凸の仮想截頭円錐面の母線上に等角度間隔で配置した少なくとも3本の貫通パイプ(13)を有するところの碇部材(10)と,その直上の水面に浮遊するブイ部材(20)とを,水深に対応して長さ調節自在としたロープ(30)で連結し,伸縮自在のリードスケール(50)の一端を前記碇部材に水平方向回転自在に連結すると共に,他端部をダイバーに連結し、前記リードスケールを定期的に伸長または収縮させながら,前記碇部材を中心として周回し,水底のゴミを収集又は落下物を探索する水底清掃・探索方法。
- ダイバー(D)によって水底(B)を清掃・探索する際に使用する装置であって、水底に不動に載置し,下向きに凸の仮想截頭円錐面の母線上に等角度間隔で配置した少なくとも3本の貫通パイプ(13)を有するところの碇部材(10)と、前記碇部材の直上の水面に浮遊するブイ部材(20)と、下端が前記碇部材に連結され,上端が前記ブイ部材を挿通して,水中に位置するウエイト(40)に連結されるロープ(30)と、一端が,前記碇部材に水平方向回転自在に連結され,他端部がダイバーに連結される伸縮自在のリードスケール(50)と、からなる水底清掃・探索装置。
- ダイバー(D)によって水底(B)を清掃・探索する際に使用する装置であって、水底に不動に載置すべく,複数の水平板材(11)を中心垂直棒(12)で交差させ,各水平板材の先端部に貫通パイプ(13)を立設し、該貫通パイプ(13)は下向きに凸の仮想截頭円錐面の母線上に等角度間隔で配置された状態とし,前記各水平板材に固定杭(15)が挿通する固定部(14)を設けた碇部材(10)と、前記碇部材の直上の水面に浮遊し,その中心部に縦孔(21)を有するブイ部材(20)と、下端が前記碇部材に連結され,上端が前記ブイ部材の縦孔を挿通して,水中に位置するウエイト(40)に連結されるロープ(30)と、一端が,前記碇部材の中心鉛直棒に360°回転自在に取付けられた回転部材(16)に連結され,他端がダイバーに連結される伸縮自在のリードスケール(50)と、からなる水底清掃・探索装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004168161A JP4155945B2 (ja) | 2004-06-07 | 2004-06-07 | 水底清掃・探索方法および同装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004168161A JP4155945B2 (ja) | 2004-06-07 | 2004-06-07 | 水底清掃・探索方法および同装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005343411A JP2005343411A (ja) | 2005-12-15 |
| JP4155945B2 true JP4155945B2 (ja) | 2008-09-24 |
Family
ID=35496162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004168161A Expired - Fee Related JP4155945B2 (ja) | 2004-06-07 | 2004-06-07 | 水底清掃・探索方法および同装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4155945B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113822104B (zh) * | 2020-07-07 | 2023-11-03 | 湖北亿立能科技股份有限公司 | 基于多候选虚拟标尺的人工智能水面检测系统 |
-
2004
- 2004-06-07 JP JP2004168161A patent/JP4155945B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005343411A (ja) | 2005-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100927474B1 (ko) | 수면의 부유폐기물 수거장치 | |
| KR101272903B1 (ko) | 항만 개보수 공사와 해상 준설 및 매립을 위한 오탁확산 방지 가시설 | |
| KR20100071117A (ko) | 수역 유출입 쓰레기를 처리하기 위한 로보틱 폰툰 및 자동 쓰레기 스크리닝 시스템 | |
| CN206427251U (zh) | 一种海床基 | |
| CN208151993U (zh) | 一种自吸式海漂垃圾收集船 | |
| JP2017128950A (ja) | ガス捕集方法 | |
| TW202503149A (zh) | 減少浸沒土壤之侵蝕 | |
| KR101611507B1 (ko) | 해상 처분장에 설치되는 집수관 및 집수관 설치방법 | |
| JP7545759B2 (ja) | 水中作業具及び水中作業システム | |
| JP4155945B2 (ja) | 水底清掃・探索方法および同装置 | |
| KR101800794B1 (ko) | 선박용 부유 타입 고정 장치 | |
| KR100494138B1 (ko) | 다기능 해양폐기물 수거선 | |
| CN112252286B (zh) | 一种海洋环保海岸带垃圾拦截处理装置 | |
| KR20220115377A (ko) | 수상 부유쓰레기 수거장치 | |
| CN103850235A (zh) | 海洋平台桩腿保护装置 | |
| CN116138224B (zh) | 滩涂潮汐分层采样装置及采样方法 | |
| JP6680842B2 (ja) | 水面浮遊物の捕集装置 | |
| CN102410786A (zh) | 单船拖曳网袋式水中悬漂物拦截装置 | |
| KR100480960B1 (ko) | 부유폐기물수거장치가 구비된 다기능 해양폐기물 수거선 | |
| JP2009022834A (ja) | 水中及び水底に浮遊又は堆積する不要藻類、浮泥等を回収する装置 | |
| KR20150136372A (ko) | 부유 펜스 | |
| CN220772633U (zh) | 伸缩式沉积物采集装置 | |
| JP2002013117A (ja) | 海生物等の除去装置 | |
| CN202304610U (zh) | 单船拖曳网袋式水中悬漂物拦截装置 | |
| RU2014380C1 (ru) | Экран для защиты водной среды от загрязнения грунтом при подводных земляных работах |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080620 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080701 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080708 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |