JP4154687B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP4154687B2 JP4154687B2 JP2002376098A JP2002376098A JP4154687B2 JP 4154687 B2 JP4154687 B2 JP 4154687B2 JP 2002376098 A JP2002376098 A JP 2002376098A JP 2002376098 A JP2002376098 A JP 2002376098A JP 4154687 B2 JP4154687 B2 JP 4154687B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- phase error
- phase
- current
- permanent magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Description
【発明の属する技術分野】
本発明は、モータ制御装置に係り、特に、インバータを用いて永久磁石同期モータを180度通電(正弦波)駆動してモータの速度を制御するに好適なモータ制御装置に関する。
【0002】
【従来の技術】
モータの速度を制御するに際して、磁極位置センサなどの位置センサを用いて永久磁石同期モータを180度通電駆動するモータ制御装置が多数発表されている。中でも、モータ電流センサを使用せずに、低分解能位置センサのみでのベクトル制御を採用し、このベクトル制御にしたがって永久磁石同期モータを180度通電制御することにより、低騒音化を実現したものが提案されている(非特許文献1)。
【0003】
【非特許文献1】
平成11年度電気学会東京支部茨城支所研究発表会論文「インバータ制御全自動洗濯機の開発」
具体的には、電気角120度間隔で取り付けられた磁極位置センサの出力による位置信号を用いて、永久磁石同期モータの回転速度ωrを求めるとともに、永久磁石同期モータの磁極基準位相θdpsを求め、磁極基準位相θdpsと制御装置の制御位相θdとの位相誤差を算出し、この位相誤差を0にするための補正信号を求め、この補正信号と回転信号ωrとから制御位相θdを算出し、さらに、回転速度指令ωr*に回転速度ωrを一致させるためのトルク電流指令Iq*を算出し、回転速度ωrとモータ電流指令(励磁電流指令Id*+トルク電流指令Iq*)から永久磁石同期モータに対する電圧指令(d軸電圧指令Vd*+q軸電圧指令Vq*)を算出し、算出された電圧指令と制御位相θdとから印加電圧Vu、Vv、Vw(PWM信号)を生成し、生成された印加電圧Vu、Vv、Vwをインバータで三相交流電圧に変換して永久磁石同期モータに印加し、永久磁石同期モータを180度通電制御するように構成されている。
【0004】
【発明が解決しようとする課題】
上記従来技術においては、上位(外部)装置から入力される回転速度指令ωr*に対して回転速度ωrが一致するようにトルク電流指令Iq*を変更して速度制御を行う方式を採用している。このため、従来技術によれば、回転速度指令ωr*に対して必要なトルクを発生し、永久磁石同期モータの速度制御が可能になる。
【0005】
言い替えると、モータ電流を検出することなく、安価な回路構成で永久磁石同期モータの180度通電制御が可能になる。
【0006】
しかし、従来技術の方式の場合には、永久磁石同期モータに対する電圧指令を算出するに対して、モータ定数や印加電圧などに誤差が生じると、トルク電流指令Iq*と実電流値とが異なり、トルク電流指令に対応したトルクが発生できなくなる。
【0007】
しかも従来技術においては、回転速度指令ωr*を基にトルク電流指令Iq*を生成する速度制御部が設置されている場合、必要なトルクを発生させるために、トルク電流指令Iq*を増加させることで、最終的には回転速度を制御できるが、必要なトルク出力までの時間は速度制御部の制御に依存する。言い替えると、瞬時に必要なトルクを発生することができない。
【0008】
また、従来技術においては、低分解能の磁極位置センサを使用しているので、電気角60度ごとの磁極位置信号と基準位相θdpsとの比較(位相誤差演算)を行い、位相補正処理により細かい制御位相θdを作成しているが、磁極位置センサの取付誤差などがあると、磁極位置信号自体にばらつきが生じ、制御位相θdが変動することになる。
【0009】
特に、高速回転時には、磁極位置信号の入力時間間隔が短くなり、位相誤差演算、位相補正を含む処理が間に合わなくなる。このため、高速時には、電気角60度ごとの処理から、例えば、電気角360度ごとの処理に切替るなどの方法が試みられているが、位相誤差の補正精度が悪くなる。
【0010】
反対に、低速回転時には、位相補正処理の動作周期が長くなり、十分な位相補正ができなくなる。
【0011】
本発明の課題は、モータ定数や印加電圧などの誤差が発生しても、トルク電流指令と実電流を一致させて指定のトルクを瞬時に出力でき、かつ、起動時から高速回転まで正確な制御位相を作成して安定したモータ制御を可能にすることにある。
【0013】
【課題を解決するための手段】
本発明は、直流電源に接続され永久磁石同期モータを駆動するインバータと、永久磁石同期モータの磁極位置を検出する磁極位置センサと、該磁極位置センサから出力される磁極位置信号に基づいて前記永久磁石同期モータの回転速度を演算する速度演算部と、前記永久磁石同期モータに流れるモータ電流を検出するモータ電流検出手段と、与えられる電流指令と前記回転速度に基づいてモータ電圧指令を生成する電圧指令生成手段と、前記モータ電圧指令と制御位相指令に基づいて前記永久磁石同期モータに印加すべき印加電圧を算出して前記インバータを制御する印加電圧算出手段を備えてなるモータ制御装置を前提構成とする。特に、前記課題を解決するために、前記制御位相指令と前記磁極位置信号から得られた実位相との第1の位相誤差を算出する第1の位相誤差算出手段と、前記モータ電流検出手段により検出されたモータ検出電流及び前記回転速度に基づいて前記永久磁石同期モータのモデル式を用いて求めたモータ電圧と前記モータ電圧指令から第2の位相誤差を算出する第2の位相誤差算出手段と、前記第1の位相誤差と前記第2の位相誤差のうちいずれか一方を選択する位相誤差選択手段とを備え、該位相誤差選択手段は、前記モータ電流検出手段により前記モータ電流を検出できないときは第1の位相誤差を選択することを特徴とする。
【0016】
これによれば、モータの停止中および低速時には第1の位相誤差を選択し、中高速時には第2の位相誤差を選択し、選択した位相誤差を用いて制御位相を更新することで、起動時から高速回転時まで正確な制御位相を作成して安定したモータ制御が可能になる。この結果、起動時から高速回転時まで指令に対応したトルクを発生することが可能になり、高トルク、高速起動を頻繁に繰返す用途への適応が可能なモータ制御装置を実現することができる。
【0017】
【発明の実施の形態】
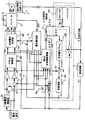
以下、本発明の一実施形態を図面に基づいて説明する。図1は本発明の一実施形態を示すモータ制御装置のブロック構成図である。本実施形態は、電動車など、高トルク、高速起動が要求される電気駆動装置のモータ駆動装置に適用した場合の構成を示している。図1において、モータ制御装置は、三相8極の突極型モータとして構成された永久磁石同期モータ1を制御対象として、インバータ2、低分解能位置センサ3、マイクロコンピュータを用いて構成されている。
【0018】
インバータ2は、直流電源21を入力として、三相ブリッジ結線されたPWM制御型のインバータとして構成されており、永久磁石同期モータ1に印加すべき印加電圧Vu、Vv、Vw(PWM信号)を基に直流電圧を交流電圧に変換して永久磁石同期モータ1を回転駆動するように構成されている。
【0019】
低分解能位置センサ3は、電気角で120度間隔に3個取付られており、永久磁石同期モータ1の磁極位置を検出して磁極位置信号を出力する位置検出手段として構成されている。すなわち、位置センサ3は、図2(a)に示すように、永久磁石モータ1が正転(CW)方向に回転したときには、永久磁石同期モータ1の誘起電圧に対応して、U相、V相、W相各相の磁極位置を検出し、検出した各相の磁極位置と磁極位置信号として速度演算部4と位相作成部5に出力するようになっている。
【0020】
一方、マイクロコンピュータは、速度演算部4、位相作成部5、電流再現部6、電流制御部7、演算部8、d軸電流制御部10、第2の位相誤差演算部11、位相誤差選択部12、切替判定部121を備えて構成されており、電流制御部7とd軸電流制御部10には、電気駆動装置の上位制御系(回路)からトルク電流指令Iq*が入力されている。
【0021】
速度演算部4は、位置センサ3の出力による磁極位置信号を用いて永久磁石同期モータ1の回転速度ωrを演算する速度演算手段として構成されており、回転速度ωrは、演算部8のベクトル演算部8A、位相作成部5の乗算器5D、第2の位相誤差演算部11、切替判定部121に出力されるようになっている。
【0022】
位相作成部5は、位相更新部5A、位相補正部5B、第1の位相誤差演算部5C、乗算器5Dを備えて構成されている。第1の位相誤差演算部5Cは、位置センサ3の出力による磁極位置信号に対応した磁極基準位相θdpsと永久磁石同期モータ1の制御位相θdとの差である第1の位相誤差Δθd1を算出する第1の位相誤差算出手段として構成されており、第1の位相誤差Δθd1は位相誤差選択部12に出力されるようになっている。
【0023】
一方、電流再現部6は、永久磁石同期モータ1の実際の電流に相当する電流を検出するために、インバータ2に流入する直流電流IDCから永久磁石同期モータ1に流れる検出モータ電流(Id、Iq)を制御位相θdに対応づけて順次再現するモータ電流検出手段として構成されており、検出モータ電流(Id、Iq)は、電流制御部7、第2の位相誤差演算部11に出力されるようになっている。
【0024】
電流制御部7は、複数の加算器と演算器を備え、トルク電流指令Iq*と励磁電流指令Id*を含む第1のモータ電流指令と、電流再現部6で再現された検出モータ電流(Id、Iq)とを一致させるための第2のモータ電流指令(Id**、Iq**)を生成してベクトル演算部8Aに出力する電流制御手段として構成されている。
【0025】
ベクトル演算部8Aは、第2のモータ電流指令(Id**、Iq**)と回転速度ωrとから次の(1)式に示すモデル式にしたがって永久磁石同期モータ1に関するモータ電圧指令(Vd*、Vq*)を生成する電圧指令生成手段として構成されており、モータ電圧指令(Vd*、Vq*)は印加電圧作成部8Bと第2の位相誤差演算部11に入力されている。
【0026】
【数1】

【0027】
第2の位相誤差演算部11は、次の(2)式を基に、電流再現部6の出力である検出モータ電流(Id、Iq)とベクトル演算部8Aの出力によるモータ電圧指令(Vd*、Vq*)、速度演算部4の出力による回転速度ωrから制御位相θdと実位相との差である第2の位相誤差Δθd2を算出する第2の位相誤差算出手段として構成されており、第2の位相誤差Δθd2は位相誤差選択部12に出力されるようになっている。
【0028】
【数2】
【0029】
位相補正部5Bは、位相誤差信号Δθdを0に抑制するための補正を行って補正信号Δωpllを出力する位相補正手段として構成されている。この補正信号Δωpllは乗算器5Dで回転速度ωrと乗算され、この乗算によって得られた信号ω1は位相更新部5Aに入力されるようになっている。位相更新部5Aは、図2(b)に示すように、信号ω1を順次積分しながら制御位相θdを更新する積分手段として構成されている。すなわち、位相補正部5B、乗算器5D、位相更新部5Aは、位相誤差信号Δθdを基に制御位相θdを算出する制御位相算出手段として構成されており、算出された制御位相θdは、位相作成部5と印加電圧作成部8Bおよび電流再現部6に出力されるようになっている。
【0030】
印加電圧作成部8Bは、永久磁石同期モータ1の磁極位置に対応して算出された制御位相θdとベクトル演算部8Aの出力によるモータ電圧指令(Vd*、Vq*)とから印加電圧Vu、Vv、Vwを算出する印加電圧算出手段として構成されており、算出された印加電圧Vu、Vv、VwはPWM信号としてそれぞれインバータ2に出力されるようになっている。
【0031】
なお、d軸電流制御部10は、トルク電流指令Iq*を入力として最適な励磁電流指令Id*を算出するように構成されている。
【0032】
次に、電流再現部6で行われる電流再現方法について図3を用いて説明する。以下の説明に当たっては、インバータ2が三相ブリッジ結線型インバータであって、上アーム側のスイッチング素子をU+、V+、W+、下アーム側のスイッチング素子をU−、V−、W−の記号で表す。
【0033】
図3は、印加電圧作成部8Bで行われるPWM信号作成方法と、インバータ2の上アームのスイッチング素子U+、V+、W+に入力されるゲート信号および図示した期間でのインバータ2と永久磁石モータ1の巻線の接続図を示している。なお、インバータ2のスイッチング動作は相補PWM動作である。
【0034】
また、PWM信号の作成には、各相のモータ電圧指令(Vu*、Vv*、Vw*)と三角波(搬送波)とを比較して作成している。図3の例では、U相が最大電圧相、V相が中間電圧相、W相が最小電圧相を示している。
【0035】
このような場合、インバータ2のスイッチング素子がオンしている組合わせは、(U+、V+、W−)、(U+、V−、W−)、(U−、V−、W−)、(U+、V+、W+)の4通りである。ここで、(U+、V+、W+)と(U−、V−、W−)の組合わせは、上アームもしくは下アームのスイッチング素子が全てオンしている状態であり、直流電流は0であって、モータ電流は再現されない状態である。
【0036】
そこで、(U+、V+、W−)と(U+、V−、W−)の状態に着目すると、(U+、V+、W−)では、図3(a)に示すように、W相のモータ電流が直流電流として流れ、(U+、V−、W−)では、図3(b)に示すように、U相のモータ電流が直流電流として流れることが分かる。言い替えると、最大電圧相と最小電圧相の2相分のモータ電流が直流電流から観測可能である。2相分のモータ電流が再現できれば、再現された2相分の電流から残りの相のモータ電流を再現することができる。
【0037】
第2の位相誤差演算部11において第2の位相誤差を算出するに際しては、前記(2)式を用いることで、広範囲に渡って正確な位相誤差を算出することができる。ただし、モータ1の停止中はモータ電流を再現できないため、第2の位相誤差を算出することはできない。すなわち、第2の位相誤差を基に制御位相θdを算出する方式は、中高速域での位相作成に適した方式である。
【0038】
上記のことを考慮し、次に、切替判定部121で作成された切替信号12sを基に位相誤差の選択方法について説明する。
【0039】
第1の位相誤差θd1は、位置センサ3の出力による磁極位置信号に基づいた位相誤差であるため、モータ1の停止中においても停止中の位相を電気角60度間隔で検出することはできる。しかし、第1の位相誤差Δθd1は位置センサ3の取付精度によってその精度が変化する。またモータ1が高速回転となる高速域では、単位時間当たりの磁極位置信号の入力回数が増加し、演算処理が間に合わなくなるため、位相誤差演算処理を電気角60度ごとから、例えば、電気角360度ごとに間引き処理を行うために、位相誤差の演算回数を低減することが余儀なくされる。
【0040】
これに対して、第2の位相誤差Δθd2は、モータ1の停止中は、モータ電流が再現できないので算出できないが、中高速域に関しては、精度良く算出することが可能である。なお、第2の位相誤差Δθd2を用いて制御位相θdを算出する方式の場合には、検出モータ電流や電圧指令と実電圧との誤差、設定定数誤差などに起因した誤差は生じるが、位置センサ3の取付誤差に比べるとその精度はかなり低いものとなる。またこの方式の場合には、あらかじめ決まった処理周期ごとに位相誤差演算処理を行っているので、モータ1の回転数に依存しない。
【0041】
したがって、モータ1の停止中および低速(極低速)時は第1の位相誤差Δθd1を選択し、中速から高速時には第2の位相誤差Δθd2を選択し、選択した位相誤差を基に制御位相θdを生成することで、起動時から高速回転時まで正確な制御位相を作成して安定したモータ制御が可能になる。
【0042】
また、何らかの理由で電流再現部6でモータ電流が再現できない状態のときには、第2の位相誤差は算出できなくなるが、このような場合には、第1の位相誤差を選択することで対応することができる。逆に、位置センサ3の出力が得られなくなったときには、第2の位相誤差を選択することで対応することができる。これにより、一方の位相誤差が得られなくても、他方の位相誤差を使用することにより、モータ制御を継続することができ、安全性の高いシステムを構築することができ、特に、電動車などには重要な機能となる。
【0043】
さらに、モータ1が回っている状態から起動するいわゆる拾い込み起動時にも、最初は第1の位相誤差を選択して制御位相を生成し、制御が安定したあとに、第2の位相誤差に切替ることにより、スムーズな拾い込み起動が可能になる。
【0044】
また、d軸電流制御部10においては、次の(3)式を用いてトルク電流指令Iq*から最適な励磁電流指令Id*を選出することができる。
【0045】
【数3】
【0046】
以上のように、本実施形態によれば、位置センサ3のみ(モータ電流センサレス)を用いたモータ制御装置において、起動時から所望のトルクを出力し、高速回転まで安定したモータ制御を実現することができる。また位置センサ3があるため、モータの停止/起動を頻繁に繰返す用途に適用しても確実な起動ができる。
【0047】
前記実施形態においては、トルク電流指令を入力してモータトルクを制御する例について説明したが、本発明は、速度指令を入力してトルク電流指令を作成する速度制御型モータ制御装置に適用することも可能である。
【0048】
【発明の効果】
以上説明したように、本発明によれば、起動時から高速回転まで正確な制御位相を作成して安定したモータ制御を可能にすることができる。
【図面の簡単な説明】
【図1】本発明の一実施形態を示すモータ制御装置のブロック構成図である。
【図2】(a)は永久磁石同期モータの誘起電圧と磁極位置信号との関係を示す波形図、(b)は制御位相の波形図である。
【図3】モータ電流の再現方法を説明するための図である。
【符号の説明】
1 永久磁石同期モータ
2 インバータ
3 低分解能位置センサ
4 速度演算部
5 位相作成部
5A 位相更新部
5B 位相補正部
5C 第1の位相誤差演算部
5D 乗算器
6 電流再現部
7 電流制御部
8A ベクトル演算部
8B 印加電圧作成部
10 d軸電流制御部
11 第2の位相誤差演算部
121 切替判定部
Claims (9)
- 直流電源に接続され永久磁石同期モータを駆動するインバータと、永久磁石同期モータの磁極位置を検出する磁極位置センサと、該磁極位置センサから出力される磁極位置信号に基づいて前記永久磁石同期モータの回転速度を演算する速度演算部と、前記永久磁石同期モータに流れるモータ電流を検出するモータ電流検出手段と、与えられる電流指令と前記回転速度に基づいてモータ電圧指令を生成する電圧指令生成手段と、前記モータ電圧指令と制御位相指令に基づいて前記永久磁石同期モータに印加すべき印加電圧を算出して前記インバータを制御する印加電圧算出手段を備えてなるモータ制御装置において、
前記制御位相指令と前記磁極位置信号から得られた実位相との第1の位相誤差を算出する第1の位相誤差算出手段と、前記モータ電流検出手段により検出されたモータ検出電流及び前記回転速度に基づいて前記永久磁石同期モータのモデル式を用いて求めたモータ電圧と前記モータ電圧指令から第2の位相誤差を算出する第2の位相誤差算出手段と、前記第1の位相誤差と前記第2の位相誤差のうちいずれか一方を選択する位相誤差選択手段とを備え、該位相誤差選択手段は、前記モータ電流検出手段により前記モータ電流を検出できないときは第1の位相誤差を選択することを特徴とするモータ制御装置。 - 直流電源に接続され永久磁石同期モータを駆動するインバータと、永久磁石同期モータの磁極位置を検出する磁極位置センサと、該磁極位置センサから出力される磁極位置信号に基づいて前記永久磁石同期モータの回転速度を演算する速度演算部と、前記永久磁石同期モータに流れるモータ電流を検出するモータ電流検出手段と、与えられる電流指令と前記回転速度に基づいてモータ電圧指令を生成する電圧指令生成手段と、前記モータ電圧指令と制御位相指令に基づいて前記永久磁石同期モータに印加すべき印加電圧を算出して前記インバータを制御する印加電圧算出手段を備えてなるモータ制御装置において、
前記制御位相指令と前記磁極位置信号から得られた実位相との第1の位相誤差を算出する第1の位相誤差算出手段と、前記モータ電流検出手段により検出された検出モータ電流及び前記回転速度に基づいて前記永久磁石同期モータのモデル式を用いて求めたモータ電圧と前記モータ電圧指令から第2の位相誤差を算出する第2の位相誤差算出手段と、前記第1の位相誤差と前記第2の位相誤差のうちいずれか一方を選択する位相誤差選択手段を有し、該選択された位相誤差に基づいて前記制御位相指令を作成し、
前記与えられる電流指令に前記モータ電流検出手段により検出された検出モータ電流が一致するように補正電流指令を算出する電流制御手段を有し、
前記電圧指令生成手段は、少なくとも前記補正電流指令に基づいて前記モータ電圧指令を生成することを特徴とするモータ制御装置。 - 請求項1又は2に記載のモータ制御装置において、
前記モータ電流検出手段は、前記インバータに流入する直流電流に基づいて前記モータ電流を再現して検出モータ電流を検出するものとし、
前記位相誤差選択手段は、前記モータ電流検出手段により前記モータ電流が再現できないときは、前記第1の位相誤差を選択することを特徴とするモータ制御装置。 - 請求項2に記載のモータ制御装置において、前記位相誤差選択手段は、前記永久磁石同期モータの回転速度に応じて前記第1の位相誤差と前記第2の位相誤差を切り替え選択することを特徴とするモータ制御装置。
- 請求項2に記載のモータ制御装置において、前記位相誤差選択手段は、少なくとも起動時は、前記第1の位相誤差を選択することを特徴とするモータ制御装置。
- 請求項2に記載のモータ制御装置において、前記位相誤差選択手段は、少なくとも最大回転数を含む高速回転時に、前記第2の位相誤差を選択することを特徴とするモータ制御装置。
- 請求項2に記載のモータ制御装置において、前記位相誤差選択手段は、前記永久磁石同期モータが前記インバータにより駆動制御されていない場合は、前記第1の位相誤差を選択することを特徴とするモータ制御装置。
- 請求項2、4乃至7のいずれか1項に記載のモータ制御装置において、前記モータ電流検出手段は、前記インバータに流入する直流電流に基づいて前記モータ電流を再現して検出モータ電流を検出するものであることを特徴とするモータ制御装置。
- 請求項4乃至7のいずれか1項に記載のモータ制御装置において、前記モータ電流検出手段は、前記インバータに流入する直流電流に基づいて前記モータ電流を再現して検出モータ電流を検出するものであり、
前記位相誤差選択手段は、前記モータ電流検出手段により前記モータ電流が再現できないときは、前記第1の位相誤差を選択することを特徴とするモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002376098A JP4154687B2 (ja) | 2002-12-26 | 2002-12-26 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002376098A JP4154687B2 (ja) | 2002-12-26 | 2002-12-26 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004208438A JP2004208438A (ja) | 2004-07-22 |
| JP2004208438A5 JP2004208438A5 (ja) | 2005-06-30 |
| JP4154687B2 true JP4154687B2 (ja) | 2008-09-24 |
Family
ID=32813644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002376098A Expired - Fee Related JP4154687B2 (ja) | 2002-12-26 | 2002-12-26 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4154687B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4589093B2 (ja) | 2004-12-10 | 2010-12-01 | 日立オートモティブシステムズ株式会社 | 同期モータ駆動装置及び方法 |
| JP5546804B2 (ja) * | 2009-06-18 | 2014-07-09 | ビアメカニクス株式会社 | 電動機駆動制御装置。 |
-
2002
- 2002-12-26 JP JP2002376098A patent/JP4154687B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004208438A (ja) | 2004-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3755424B2 (ja) | 交流電動機の駆動制御装置 | |
| JP3681318B2 (ja) | 同期モータ制御装置及びそれを用いた車両 | |
| JP3695342B2 (ja) | 電動機の制御装置 | |
| JP3888082B2 (ja) | モータ装置およびその制御方法 | |
| JP3661642B2 (ja) | モータの制御装置及びその制御方法 | |
| JP5838038B2 (ja) | モータ制御装置 | |
| JP4406552B2 (ja) | 電動機の制御装置 | |
| US20070296371A1 (en) | Position sensorless control apparatus for synchronous motor | |
| JP4926492B2 (ja) | モータ制御装置 | |
| JP2005051892A (ja) | モータ駆動装置 | |
| JPH1127997A (ja) | モータの制御装置及び制御方法 | |
| US20110062904A1 (en) | Alternating current motor control system | |
| JPH09215382A (ja) | 永久磁石同期モータの駆動方法 | |
| JP4007309B2 (ja) | モータ制御装置及びモータ制御方法 | |
| JP4154687B2 (ja) | モータ制御装置 | |
| JP5888148B2 (ja) | 回転機の制御装置 | |
| JP2019208329A (ja) | センサレスベクトル制御装置及びセンサレスベクトル制御方法 | |
| KR101937958B1 (ko) | 역기전력 신호를 이용한 센서리스 모터의 오류 판단장치 | |
| JP2004023920A (ja) | 交流モータ制御装置 | |
| JP3706556B2 (ja) | 永久磁石モータの制御装置 | |
| JP4003700B2 (ja) | 6線式3相ブラシレスモータ制御装置 | |
| JP4455960B2 (ja) | Dcブラシレスモータの制御装置 | |
| JP2003209999A (ja) | モータ制御装置 | |
| JP2003033068A (ja) | モータ制御装置及びそれを用いた電気駆動装置 | |
| JP2002191198A (ja) | モータ駆動装置の直流電圧検出値補正方法、モータ駆動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080603 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080626 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120718 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130718 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |