JP4119556B2 - 産業用ロボットの手首装置 - Google Patents
産業用ロボットの手首装置 Download PDFInfo
- Publication number
- JP4119556B2 JP4119556B2 JP03141899A JP3141899A JP4119556B2 JP 4119556 B2 JP4119556 B2 JP 4119556B2 JP 03141899 A JP03141899 A JP 03141899A JP 3141899 A JP3141899 A JP 3141899A JP 4119556 B2 JP4119556 B2 JP 4119556B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- shaft
- driven
- complementary
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Landscapes
- Manipulator (AREA)
Description
【産業上の利用分野】
本発明は産業用ロボットの手首装置に関し、産業用ロボット先端に取付けられる作業工具等に供給されるエアー、水、電気等の配管、配線を手首装置内に配置することを可能にする産業用ロボットの手首装置に関する。
【0002】
【従来の技術】
従来の産業用ロボットの先端に取付けられた作業工具等に供給されるエアー、水、電気等の供給手段を手首内を通過させる手首装置としては、特公平4-46720 号、特開平8-229874号公報に記載されたものがある。これらの装置は互いに角度を有する軸の回転を伝達するため中心を中空とした歯車を利用している。
【0003】
【発明が解決しようとする課題】
従来技術において角度を有する軸の回転伝達として歯車を利用しているが、歯車には当然、歯車間の隙間が存在しロボットの性能を損なう。またロボットの性能に関し当初は問題なくても、経年の使用により歯車の歯面が摩耗し歯車の隙間が増大しロボットの性能を損なう問題がおきてくる。このため歯車の定期的な点検、交換が必要になる。また、従来技術の手首装置は30Kgf 以下の可搬重量ロボットに適用され、可搬重量が100Kgf以上のロボットでは歯車の摩耗が大きな問題となり、歯車を利用した中空を有する手首装置は困難とされている。
本発明の課題は、角度を有する手首軸の回転伝達として歯車を使用せず、歯車間の隙間によるロボットの性能を損なうことがなく、かつ100Kgf以上の可搬ロボットにおいても中空通路を有する手首構造を可能とし、経年の使用においても性能の劣化しない産業用ロボットの手首装置を提供することにある。
【0004】
【課題を解決するための手段】
上記問題を解決するため、産業用ロボットの上腕内に同一の駆動軸線の回りに配置してなり、それぞれ独立に回転可能に配置された中空管状の外から順に第1、第2、第3の駆動軸を有し、前記第1の駆動軸に第1の手首部を固定し、
前記第1の手首部は、前記駆動軸線に対し鈍角を持った第1の従動軸線の回りに中空の第1の従動軸を回転可能に支持し、中空管状の前記第2の駆動軸は径方向2箇所に軸を固定し、前記径方向2箇所の各軸は前記駆動軸線と前記第1の従動軸線との交点を軸心とする第1の円環を回転可能に支持し、前記第1の円環上に前記径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を固定し、前記ずらした2個の軸は前記第1の従動軸の延長部と連結され、前記第2の駆動軸と前記第1の従動軸とは、前記径方向2箇所の各軸と前記ずらした2個の軸とが前記延長部を介して自在継手として連結され、前記第1の従動軸の他端に第2の手首部を固定し、
前記第2の手首部は前記第1の従動軸線に対し鈍角を持った第2の従動軸線の回りに回転可能に第2の従動軸を支持し、中空管状の前記第3の駆動軸は径方向2箇所に軸を固定し、該径方向2箇所の各軸は前記駆動軸線と前記第1の従動軸線との交点を軸心とする前記第1の円環と同軸の第2の円環を回転可能に支持し、前記第2の円環上に該第3の駆動軸の径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を固定し、
前記第2の従動軸は径方向2箇所に軸を固定し、前記径方向2箇所の各軸は第1の従動軸線と第2の従動軸との交点を軸心とする第3の円環を回転可能に支持し、前記第3の円環上に前記径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を配置し、第3の駆動軸は前記第2の従動軸に対し各前記第2の円環上と第3の円環上の対応する各2個の軸を第1の中間軸を介して自在継手として連結し、かつ前記第2の従動軸の他端に工具支持部を固定したことを特徴とする産業用ロボットの手首装置としたものである。
【0005】
請求項1項の機構ではこの種の機構にみられる駆動軸と従動軸の回転が等しくない問題がある。この問題解決のため請求項2又は請求項3では、駆動軸と第1の従動軸、第1の従動軸と第2の従動軸のなす角度の1/2の角度を有する中間軸を設け駆動軸の回転を等速に従動軸に伝えている。
【0006】
【作用】
かかる構成により、従来技術での歯車による伝達にみられる隙間がなく、ロボットの性能を損なうことはなく、また隙間がないため摩耗の心配もなく、性能の劣化も歯車による伝達に比べ非常に小さいものとなる。
また、100Kgf可搬以上といったロボットの手首装置を、従来技術による歯車伝達で実施する場合、歯車のモジュールを大きくする必要があり、歯車径がモジュールに比例して大きくなり、結果として手首装置全体を大きくする必要がある。本発明では歯車の歯部に比べ、円環を軸支する軸の強度は充分大きく、また隙間による摩耗もないため100Kgf以上の可搬重量に適したものでも手首装置のコンパクト性を損なわずに適用が可能である。
この伝達機構により、駆動軸、従動軸、中間軸は中空となり、またこれらの軸を接続する円環も中空となり、駆動軸線、中間軸線、従動軸線に沿った中空通路にエアー、水、電気等の配管、配線の配置が可能となる。
【0007】
【実施形態】
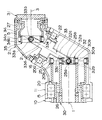
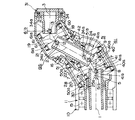
本発明の実施形態を図1乃至図4に示す。図1は請求項1項に示す本発明の第1の実施形態の概略断面図、図2は図1の第2の駆動軸と第1の従動軸の間に第1の補完軸を設けた請求項2項に示す本発明の第2の実施形態の概略断面図、図3は図2の実施形態にさらに、第3の駆動軸と第2の従動軸の間に第2の補完軸、第3の従動軸及び第3の補完軸を設けた請求項3項に示す本発明の第3の実施形態の概略断面図、図4は図3の第3の駆動軸、第3の従動軸、第2の従動軸の中空部に保護カバーを設けた本発明の第4の実施形態の概略断面図である。
【0008】
図1において、図示しない産業用ロボットの上腕内に同一の駆動軸線1 の回りに配置してなり、それぞれ独立に回転可能に配置された中空管状の外から順に第1、第2、第3の駆動軸 10、20、30 を有する。第1の駆動軸10に第1の手首部11が固定され、第1の駆動軸10が回転するときは第1の手首部11は駆動軸線1 の回りを回転する。第2の駆動軸20は第1の駆動軸10に対し軸受15を介して駆動軸線1 の回りに回転可能に支持されている。第1の手首部11に軸受16を介して中空の第1の従動軸22が駆動軸線1 に対し鈍角を持った第1の従動軸線2 の回りに回転可能に支持されている。中空管状の第2の駆動軸20は径方向2箇所に軸 20aを固定し、各軸 20aは駆動軸線1 と第1の従動軸線2 との交点を軸心とする第1の円環25を軸受 20bを介して回転可能に支持する。第1の円環25上に各軸 20aに対し周方向に90°ずつずらした2個の軸 25aは、点線で示す第1の従動軸22の延長部 22cに固定され、第1の円環25上の軸受 25bを介して第1の円環25に対し第1の従動軸22が回動可能に取付けられる。第2の駆動軸20は第1の従動軸22に対し、軸 20a、第1の円環25、軸 25aを介して自在継手で連結されることになる。第1の従動軸22の他端に第2の手首部21が固定され、第2の駆動軸20が回転すると、第1の従動軸22及び第2の手首部21が第1の従動軸線2 の回りで従動回転する。
【0009】
中空管状の第3の駆動軸30は第2の駆動軸20に対し軸受26を介して駆動軸線1 の回りに回転可能に支持されている。第1の従動軸線 2 に対し、鈍角(一般には駆動軸線 1 と第1 の従動軸線 2 とのなす角度に等しいことが望ましい)を持って第2の従動軸線 3 を設け、第2の従動軸 34 が第2の従動軸線 3 に対して回転可能に第2の手首部 21 に軸受 27 を介して軸支され、第2の従動軸 34 の他端に工具支持部 31 を固定している。第3の駆動軸30は径方向2箇所に軸 30aを固定し、各軸 30aは駆動軸線1 と第1の従動軸線2 との交点を軸心とする第1の円環 25 と同軸の第2の円環32を軸受 30bを介して回転可能に支持する。第2の円環32上に各軸 30aに対し周方向に90°ずつずらした2個の軸 32aは、中空の第1の中間軸33の延長部 33cに固定され、第2の円環32上の軸受 32bを介して第2の円環32に対し第1の中間軸33が回転可能に取付けられる。第3の駆動軸30 は第1の中間軸33に対し、軸 30a、第2の円環32、軸 32aを介して自在継手で連結されることになる。第1の中間軸33は第1の従動軸22内周と隙間をもって回転可能な大径円筒部 33eと、大径円筒部 33eから径方向に2箇所から延びる延長部 33c、 33dを有し、延長部 33d端部に第3の円環 35 が回転可能に支持される。
【0010】
中空管状の第2の従動軸34は径方向2箇所に軸 34aを固定し、各軸 34aは第1の従動軸線2 と第2の従動軸線3 との交点を軸心とする第3の円環35を軸受 34bを介して回転可能に支持する。第3の円環35上に各軸 34aに対し周方向に90°ずつずらした2個の軸 33aは、第1の中間軸33の他の延長部 33dに固定され、第3の円環35上の軸受 33bを介して第3の円環35に対し第1の中間軸33が回転可能に取付けられる。第1の中間軸33は第2の従動軸34に対し、各第2の円環 32 上と第3の円環 35 上の対応する各2個の軸 32a,32a,33a,33a を中空の第1の中間軸 33 を介して自在継手として連結され、ひいては第3の駆動軸30と連結され、第3の駆動軸30が回転すると、第2の従動軸34とそれに固定された工具支持部31を第2の従動軸線3 の回りで従動回転させる。
【0011】
第2の従動軸34とそれに固定された工具支持部31は作業工具等の取付けフランジを形成する。かかる機構により、図4に示すように、工具支持部12に取付けられる作業工具等に供給されるエアー、水、電気等の配管、配線等を第3の駆動軸30、第1の従動軸 22 、第2の従動軸34内を通し、工具支持部31に連通させるため、第3の駆動軸30から工具支持部31に至る内部を中空部とし、この中空部に配管、配線等を保護するフレキシブルチューブを配置することができる。
【0012】
上記手首装置において、例として第3の駆動軸30と第1の中間軸 33、第1の中間軸 33と第2の従動軸34の回転の伝達において、駆動軸線1 と第1の従動軸線2 のなす角をα、第3の駆動軸30の回転角をθ1、第1の中間軸 33の回転角をθ2とすると以下の関係がある。
TANθ2=TAN θ1・COS α――――(1)
同様に第1の従動軸線2 と第2の従動軸線3 とのなす角をβ、第1の中間軸 33の回転角をθ2、第2の従動軸34の回転角をθ3とすると
TANθ3=TAN θ2/COS β――――(2)
ここでα=βとすれば(1)、(2)式より
TANθ1=TAN θ3 ――――(3)
(3)式より駆動軸線1 と第1の従動軸線2 のなす角と第1の従動軸線2 と第2の従動軸線3 とのなす角を等しくすれば第3の駆動軸30と第2の従動軸34は等速回転することが可能であり、第1の中間軸 33における軸 33aと軸 32aとの位相を等しくかつ、前記αとβを等しくすることが望ましい。
【0013】
図1の実施形態によれば、第2の駆動軸20と第1の従動軸22は、第2の駆動軸20が1回転するとき第1の従動軸22も1回転するが、等速回転はしない問題が発生する。
図2はかかる問題を解決する本発明の第2の実施形態で、図1の第2の駆動軸 20 と第1の従動軸 22 の間に第1の補完軸 28 を設けたものである。図2において、第2の駆動軸20の駆動軸線1 と第2の従動軸線2 のなす角度の1/2となるよう、第2の駆動軸20の駆動軸線1 と第1の従動軸線2 との交点を第1の頂点4 とし、第1の頂点4 より第2の駆動軸20の駆動軸線1 及び従動軸線2 上にそれぞれ等しい距離となるような各軸線上の2点 5、6を結んだ第1の補完軸線7 を設ける(駆動軸線1 と第1の従動軸線2 の交点4 を頂点とし、駆動軸線1 、第1の従動軸線2 、第1の補完軸線7 は2等辺三角形を形成する)。第2の駆動軸20と第1の従動軸 22間に第1の補完軸線7 の回りを回転可能な第1の補完軸 28を設け、第1の補完軸 28は一端が第2の駆動軸20に連結された第1の円環 25に軸受 25bで回転可能に支持された軸 25aに固定される。第1の従動軸 22 は径方向2箇所に軸 23a を固定し、各軸 23a は第1の従動軸線 2 と第1の補完軸線 7 との交点を軸心とする第4の円環 29 を軸受を介して回転可能に支持し、軸 23a に対し第4の円環 29 上に周方向に 90 °ずつずらした2個の軸 29a は、第1の補完軸 28 の他端に連結される。このことにより、図1の実施形態における第3の駆動軸30と第2の従動軸34の場合と同様に、第2の駆動軸20と第1の従動軸 22とは等速回転する。
【0014】
図1、図2の実施形態では例えば第3の駆動軸30と第1の中間軸33、第1の従動軸 22が干渉するので、各円環25、32、29との接続点以外は大きく切り欠いている。この場合伝達系で各円環25、32、29の捩り剛性が円筒に対し大きく劣ることになる。かかる問題を解決するため図3の本発明の第3の実施形態では、図2の本発明の第2の実施形態に加え、第1の頂点4 より駆動軸線1 及び従動軸線2 上にそれぞれ等しい距離となるような各軸線上の2点 8 、 9 を結んだ第2の補完軸線 17の回りに回転可能な円筒状の第2の補完軸 40を、第3の駆動軸30と第3の従動軸24との間に設ける。第2の補完軸 40は両端に径方向に各2箇所軸 40a、40aを介して一対の第1の補完円環 41、41を回転可能に支持し、各軸 40aから周方向に90°ずつずらした2個の軸 41a、41aが各第1の補完円環 41、41に固定され、各軸 41a、41aは軸受 41b、41bを介して第3の駆動軸30と第3の従動軸24にそれぞれ回転可能に支持され、ひいては第3の駆動軸30と第3の従動軸24にそれぞれ第2の補完軸 40及び各第1の補完円環 41、41が回転可能に支持される。第3の従動軸24は軸受42を介して第1の従動軸22に回転可能に支持される。
【0015】
さらに、第2の駆動軸20と第1の従動軸22との間に、第1の頂点4 より駆動軸線1 及び従動軸線2 上にそれぞれ等しい距離となるような各軸線上の2点 5 、 6を結んだ第1の補完軸線 7の回りに回転可能な円筒状の第1の補完軸 28を設ける。第1の補完軸 28 は両端に径方向に各2箇所軸 50a、50aを介して2点 5 、 6 を中心とする一対の第2の補完円環 51、51を回転可能に支持し、各軸 50a、50aから周方向に90°ずつずらした2個の軸 25a、24aが各第2の補完円環 51、51に固定され、各軸 25a、24aは軸受 51b、51bを介して第2の駆動軸20と第1の従動軸22にそれぞれ回転可能に支持され、ひいては第2の駆動軸20と第1の従動軸22にそれぞれ第1の補完軸 28及び各第2の補完円環 51、51が回転可能に支持される。
また、第3の従動軸24と第2の従動軸34の間に、第1と第2の従動軸線 2、3の交点を第3の頂点19とし、第3の頂点19より第1と第2の従動軸線 2、3上にそれぞれ等しい距離となるような各軸線上の2点 12、13を結んだ第3の補完軸線18の回りに回転可能な円筒状の第3の補完軸60を設ける。第3の補完軸60は両端に径方向に各2箇所軸受 61a、61aを介して2点 12 、 13 を中心とする一対の第3の補完円環 61、61を回転可能に支持し、各軸受 61a、61aから周方向に90°ずつずらした2個の軸 24a、34aが各第3の補完円環 61、61に固定され、各軸 24a、34aは軸受 61b、61bを介して第3の従動軸24と第2の従動軸34にそれぞれ回転可能に支持され、ひいては第3の従動軸24と第2の従動軸34にそれぞれ第3の補完軸60及び各第3の補完円環 61、61が回転可能に支持される。
【0016】
これら第2の補完軸 40 、第1の補完軸 28及び第3の補完軸60の円筒径を違わせることにより、例えば第3の駆動軸30と第1の中間軸33、第1の従動軸23が干渉はなくそれぞれの軸を円筒で結合可能となり捩り剛性も大幅な向上となる。この径違いの結合において各円環は慨円環となる。また図3の実施態様では、第1の補完軸 28及び第3の補完軸60により、例えば第2、第3の駆動軸20、30 の回転により、第2の手首部21及び工具保持部31の回転がつれまわり速度は等速となり、制御も簡単となる。
図4は図3の第3の駆動軸30から工具支持部31に至る内部を中空部とし、この中空部に配管、配線等を保護するフレキシブルチューブ65を配置した実施形態の概略断面図である。保護カバー65は、第3の駆動軸30と第3の従動軸24との間、第3の従動軸24と第2の従動軸 34との間が、それぞれジャバラ 66、67を介して連結されている。図2においても、図4に示すような保護カバーを設けることができることはいうまでもない。
【0017】
【発明の効果】
従来技術の歯車伝達方式での歯車間の隙間によるロボット性能の損失が本発明では隙間の無い機構で回転の伝達が可能となり、歯車伝達でみられるロボット性能の損失がない。また隙間がないため、歯車でみられる経年の使用による歯部の摩耗によるロボット性能の劣化もなく経年に渡って良好な性能での使用が可能である。さらに力の伝達は歯車の歯より充分大きな強度の軸によって伝達するため従来技術の手首装置より、よりコンパクトで剛性が高くより大きな負荷を手首装置の先端に持つことが可能となる。
【図面の簡単な説明】
【図1】 請求項1項に示す本発明の第1の実施形態の概略断面図。
【図2】 図1の第2の駆動軸と第1の従動軸の間に第1の補完軸を設けた請求項2項に示す本発明の第2の実施形態の概略断面図。
【図3】 図2の実施形態にさらに、第3の駆動軸と第2の従動軸の間に第1の補完軸、第3の従動軸及び第3の補完軸を設けた請求項3項に示す本発明の第3の実施形態の概略断面図。
【図4】 図3の第3の駆動軸、第3の従動軸、第2の従動軸の中空部に保護カバーを設けた本発明の第4の実施形態の概略断面図。
【符号の説明】
1 駆動軸線 2 第1の従動軸線 3 第2の従動軸線
4 第1の頂点 7 第1の補完軸線 8 第2の頂点
10 第1の駆動軸 11 第1の手首部
15,16,20b,24b,25b,30b,32b,34b,40b,41b,50b,51b,60b,61b 軸受
20a,24a,25a,30a,32a,34a,40a,41a,50a,51a,60a,61a 軸
17 第1の補完軸線 18 第3の補完軸線 19 第3の頂点
20 第2の駆動軸 21 第2の手首部 22 第1の従動軸
24 第3の従動軸 25 第1の円環 28 第1の補完軸
29 第4の円環 30 第3の駆動軸 31 工具支持部
32 第2の円環 33 第1の中間軸 34 第2の従動軸
35 第3の円環 40 第2の補完軸 41 第1の補完円環
51 第2の補完円環 60 第3の補完軸 61 第3の補完円環
65 保護カバー 66、67 ジャバラ
Claims (4)
- 産業用ロボットの上腕内に同一の駆動軸線の回りに配置してなり、それぞれ独立に回転可能に配置された中空管状の外から順に第1、第2、第3の駆動軸を有し、前記第1の駆動軸に第1の手首部を固定し、
前記第1の手首部は、前記駆動軸線に対し鈍角を持った第1の従動軸線の回りに中空の第1の従動軸を回転可能に支持し、中空管状の前記第2の駆動軸は径方向2箇所に軸を固定し、前記径方向2箇所の各軸は前記駆動軸線と前記第1の従動軸線との交点を軸心とする第1の円環を回転可能に支持し、前記第1の円環上に前記径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を固定し、前記ずらした2個の軸は前記第1の従動軸の延長部と連結され、前記第2の駆動軸と前記第1の従動軸とは、前記径方向2箇所の各軸と前記ずらした2個の軸とが前記延長部を介して自在継手として連結され、前記第1の従動軸の他端に第2の手首部を固定し、
前記第2の手首部は前記第1の従動軸線に対し鈍角を持った第2の従動軸線の回りに回転可能に第2の従動軸を支持し、中空管状の前記第3の駆動軸は径方向2箇所に軸を固定し、該径方向2箇所の各軸は前記駆動軸線と前記第1の従動軸線との交点を軸心とする前記第1の円環と同軸の第2の円環を回転可能に支持し、前記第2の円環上に該第3の駆動軸の径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を固定し、
前記第2の従動軸は径方向2箇所に軸を固定し、前記径方向2箇所の各軸は第1の従動軸線と第2の従動軸との交点を軸心とする第3の円環を回転可能に支持し、前記第3の円環上に前記径方向2箇所の各軸から周方向に90°ずつずらした2個の軸を配置し、前記第3の駆動軸は前記第2の従動軸に対し各前記第2の円環上と第3の円環上の対応する各2個の軸を第1の中間軸を介して自在継手として連結し、かつ前記第2の従動軸の他端に工具支持部を固定したことを特徴とする産業用ロボットの手首装置。 - 前記第2の駆動軸の駆動軸線と第1の従動軸線との交点を第1の頂点とし、前記第1の頂点より第2の駆動軸の駆動軸線及び第1の従動軸線にそれぞれ等しい距離となるような前記各軸線上の2点を結んだ第1の補完軸線を設け、前記第2の駆動軸と第1の従動軸の間に前記第1の補完軸線の回りを回転可能な第1の補完軸を設け、前記第1の補完軸の一方の延長部が前記第1の円環に支持された軸に回転可能に支持され、前記第1の従動軸は径方向2箇所に軸を固定し、前記径方向2箇所の各軸は前記第1の従動軸線と前記第1の補完軸線との交点を軸心とする第4の円環を回転可能に支持し、前記径方向2箇所の各軸に対し前記第4の円環上に周方向に 90 °ずつずらした2個の軸は前記第1の補完軸の他端に連結されたことを特徴とする請求項1項記載の産業用ロボットの手首装置。
- 前記第3の駆動軸の駆動軸線と第1の従動軸線との交点を前記第1の頂点とし、前記第1の頂点より第2の駆動軸の駆動軸線及び第1の従動軸線にそれぞれ等しい距離となるような前記各軸線上の2点を結んだ第2の補完軸線を設け、前記第3の駆動軸と前記第1の従動軸に軸受を介して回転可能に支持された第3の従動軸の間に、前記第2の補完軸線の回りを回転可能な第2の補完軸を設け、前記第2の補完軸は両端に一対の第2の補完円環を回転可能に支持し、前記第3の駆動軸と前記第3の従動軸は、前記第2の補完円環及び前記第2の補完円環上に周方向に90°ずつずらした各2個の軸とを自在継手として連結され、
かつ前記第1の従動軸線と第2の従動軸線との交点を第3の頂点とし、前記第3の頂点より第1の従動軸線と第2の従動軸線にそれぞれ等しい距離となるような前記各軸線上の2点を結んだ第3の補完軸線を設け、前記第2の従動軸と前記第3の従動軸との間に、前記第3の補完軸線の回りを回転可能な第3の補完軸を設け、前記第3の補完軸は、両端に一対の第3の補完円環を回転可能に支持し、前記第2の従動軸と前記第3の従動軸は、前記第3の補完円環及び前記第3の補完円環上に周方向に90°ずつずらした各2個の軸とを自在継手として連結されたことを特徴とする請求項2項記載の産業用ロボットの手首装置。 - 前記工具支持部に取付けられる作業工具に供給されるエアー、水、電気を含む配管、配線類を前記第3の駆動軸内から工具支持部内に連通させるため、前記第3の駆動軸、前記第1の従動軸又は第3の従動軸、及び前記第2の従動軸の中空部に前記配管、配線類を保護するフレキシブルチューブを配置したことを特徴とする請求項1、請求項2又は請求項3記載の産業用ロボットの手首装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03141899A JP4119556B2 (ja) | 1999-02-09 | 1999-02-09 | 産業用ロボットの手首装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03141899A JP4119556B2 (ja) | 1999-02-09 | 1999-02-09 | 産業用ロボットの手首装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000225591A JP2000225591A (ja) | 2000-08-15 |
| JP2000225591A5 JP2000225591A5 (ja) | 2006-02-16 |
| JP4119556B2 true JP4119556B2 (ja) | 2008-07-16 |
Family
ID=12330724
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP03141899A Expired - Lifetime JP4119556B2 (ja) | 1999-02-09 | 1999-02-09 | 産業用ロボットの手首装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4119556B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100763010B1 (ko) | 2006-07-25 | 2007-10-17 | 재단법인 포항지능로봇연구소 | 손목관절장치 및 이를 이용한 로봇 |
| AT514914B1 (de) * | 2013-09-30 | 2015-05-15 | Lungenschmid Dieter Dr | Krümmvorrichtung, insbesondere Roboterarm |
| CN112720562A (zh) * | 2021-01-08 | 2021-04-30 | 埃夫特智能装备股份有限公司 | 一种机器人的关节构造 |
-
1999
- 1999-02-09 JP JP03141899A patent/JP4119556B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000225591A (ja) | 2000-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2172671B1 (en) | Gear device and rotation section structure adapted for industrial robot and using the gear device | |
| EP0249232B1 (en) | Wrist device of robot | |
| US4840090A (en) | Harmonic speed changer | |
| EP1598153B1 (en) | Multijoint manipulator | |
| JP3659707B2 (ja) | ロボット等の旋回部構造 | |
| US5934148A (en) | Wrist mechanism of industrial robot | |
| JP2010184328A (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット | |
| JP6708684B2 (ja) | 駆動モータおよび減速機を備えるロボットの関節部の構造 | |
| US6389921B1 (en) | Wrist mechanism of industrial robot | |
| CN110614650B (zh) | 机械手及挠曲啮合式齿轮装置 | |
| EP0621112A1 (en) | Industrial robot having joints using a hollow reduction gear | |
| JP4119556B2 (ja) | 産業用ロボットの手首装置 | |
| KR850000551B1 (ko) | 로보트의 관절장치 | |
| US5816117A (en) | Dual inputs and dual outputs harmonic drive apparatus | |
| JP7303702B2 (ja) | ロボット | |
| CA1207817A (en) | Robot wrist and arm | |
| JP3437536B2 (ja) | 産業用ロボットの手首駆動装置 | |
| CN112112940B (zh) | 传动机构 | |
| JP5394358B2 (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット | |
| JP2000225591A5 (ja) | ||
| WO2023218846A1 (ja) | 減速機、駆動装置、及び建設機械 | |
| EP0712470B1 (en) | Speed reduction unit with bearing | |
| WO2023053292A1 (ja) | 芯出し構造、機械、及びロボット | |
| JPS6021188Y2 (ja) | マニピユレ−タ等における関節 | |
| WO1999012709A1 (fr) | Moteur avec reducteur de vitesse et robot industriel |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071002 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080425 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110502 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110502 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120502 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120502 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130502 Year of fee payment: 5 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |