JP4036567B2 - 制御形磁気軸受装置 - Google Patents
制御形磁気軸受装置 Download PDFInfo
- Publication number
- JP4036567B2 JP4036567B2 JP14470199A JP14470199A JP4036567B2 JP 4036567 B2 JP4036567 B2 JP 4036567B2 JP 14470199 A JP14470199 A JP 14470199A JP 14470199 A JP14470199 A JP 14470199A JP 4036567 B2 JP4036567 B2 JP 4036567B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- control unit
- magnetic bearing
- control
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0444—Details of devices to control the actuation of the electromagnets
- F16C32/0451—Details of controllers, i.e. the units determining the power to be supplied, e.g. comparing elements, feedback arrangements with P.I.D. control
Description
【発明の属する技術分野】
本発明は、回転体の支持手段として磁気軸受を使用した装置の該磁気軸受の制御装置に係り、特にアンバランスな回転体の振れ回り運動に対する振動振幅を小さく抑えるのに好適な制御形磁気軸受装置に関する。
【0002】
【従来の技術】
図1は、制御形磁気軸受装置の基本的な構成を示す。理解し易くするために、回転体のラジアル方向を支持する軸受の一部分を抜き出して説明する。回転軸に直交するX−Y軸平面のX軸分について、図1にそのフィードバック制御系の構成を示す。回転体1を中心に横軸にX軸、縦軸にY軸をとり、X軸上に回転体を挟むように変位センサ2a,2bと、電磁石3a,3bを配置している。Y軸には、図示が省略されているが、同様に電磁石及び変位センサが配置されている。変位センサ2a,2bはセンサアンプ4とつながっており、これらで構成される変位センサユニットを備えている。センサアンプ4の出力信号は、回転体の変位に相当した電気信号(センサ信号)である。このセンサ信号は、回転体を所望の浮上位置に保持するための補償信号を形成する第一の制御ユニット5へ入力される。
【0003】
第一の制御ユニット5で演算した結果は、パワーアンプ6a,6bを介して制御電流を電磁石3a,3bのコイルに供給する。パワーアンプは、電磁石3a,3bのそれぞれに対応した個別のパワーアンプ6a,6bを備えている。電磁石3a,3bでは供給された電流により電磁力が発生し、回転体1に対して磁気吸引力を作用させる。このように回転体1の左右への変位に応じて、対向する一対の電磁石に制御電流を供給し、その吸引力によって回転体1が中心位置又は目標位置に浮上保持するようにサーボ制御する。
【0004】
【発明が解決しようとする課題】
ところで、磁気軸受の適用が広汎に進むにつれて、構造、大きさの制約から下記問題に直面することがある。
例えば回転体の有する不釣り合い量が大きく、これを磁気軸受でラジアル方向に支持して回転させると、回転体が偏心して回転する、いわゆる振れ回りを起こす場合がある。この場合には、回転体の偏心量が大きくなると、磁気軸受のタッチダウン隙間に収まらず、その結果、非接触浮上が行えず、装置を損傷する恐れが発生する。
回転体の浮上位置がモータステータに対して、その磁気的中心に位置しない場合に、回転運動に同期した外力を回転体がモータステータから受ける。特に、例えば送風機などの回転により仕事をする機械の場合、回転数の上昇に伴う負荷の増加によりモータ出力を大きくする必要があり、回転運動に同期した外力が大きく作用する。
【0005】
又、モータが回転運動に同期したラジアル方向の電磁力を発生する場合に、回転体の浮上位置にかかわらず、外力としての作用が大きな負担になる。その結果、回転体は大きく振れ回り、程度によってはタッチダウンしてしまう。
いずれも、外力に対して十分な制御力を発生できる軸受を適用すれば問題は解決するが、磁気軸受の剛性が転がり軸受や滑り軸受に比べて小さいことから、従来の軸受剛性と同等の剛性を発生できる電磁石を採用することは難しい。例えば、1平方センチメートルの面積が対向する空間に、磁束密度1テスラを発生させた場合の吸引力は、Maxwellの応力の式が示す通り約40ニュートンである。制御形磁気軸受の場合には、一般に0.5テスラ程度であるから約10ニュートンしか得られない。
【0006】
このような背景で、最近では回転運動に同期した外力を推定し、外力を相殺する制御信号をパワーアンプ入力に加算して、振れ回りを抑制するフィード・フォワード制御が試みられたものがある。また、既知の外力に対して、回転数に同期した正弦波や三角波信号をパワーアンプ入力に加算して、振れ回りを制御するオープンバランス制御が知られている。いずれも、制御軸の変位センサ信号の他に、直交する軸の変位センサ信号や回転運動に同期したパルス信号などを必要とする。
【0007】
本発明は上述した事情に鑑みて為されたもので、基本的に制御軸の変位センサ信号のみに基づき、制御信号を発生させ、回転運動に同期した外力による回転体の振れ回りを抑制して、回転体を安定に浮上支持できる制御形磁気軸受装置を提供することを目的とする。尚、「基本的に」とは制御信号を生成させることには使用しないが、下記2点の目的に既存のモータコントローラから得られる回転数に比例した電圧信号を使用する。
(1)制御信号をパワーアンプ入力へ加算する手前のスイッチのオン・オフ。
(2)回転数成分抽出フィルタの動作用。
【0008】
【課題を解決するための手段】
請求項1に記載の発明は、回転体を支持する制御形磁気軸受装置であって、回転体の運動情報を検出するセンサユニットと、そのセンサ信号に基づき制御信号を演算する第一の制御ユニットと、該制御ユニット信号に基づき電流を駆動するパワーアンプユニットと、磁気力を発生する電磁石とを備えた、回転体をラジアル方向に支持する磁気軸受装置において、前記第一の制御ユニットと並列に第二の制御ユニットを備え、前記センサ信号を該第二の制御ユニットへ導入し、該第二の制御ユニット内では、前記センサ信号からその位相を変化させた信号を生成し、前記第二の制御ユニットにおける位相の変化量は、前記磁気軸受の外力/変位の伝達特性から、前記回転体の振れ回りを抑制する位相の変化量を与えるものであり、該第二の制御ユニットの出力信号を前記第一の制御ユニットの出力信号に加え、該加算した出力信号に基づき、前記電磁石の電流を制御するようにし、前記第二の制御ユニットには、前記センサ信号から回転周波数成分を抽出するフィルタと、該フィルタ出力信号の位相を調整する位相調整器と、該位相調整器出力と基準電位とを比較するコンパレータを含む信号形成器と、該信号形成器出力信号の振幅を調整するゲイン調整器とを備えたことを特徴とする。
【0010】
これにより、回転体に振れ回りがあると、変位センサにこの振れ回りに対応した信号が現れる。従って、この信号に対応させて、磁気軸受の制御特性から振れ回りに作用する外力に対して反対方向の制御力を作用させることで、振れ回りを小さくすることができる。この制御力は磁気軸受の制御特性から、変位センサ信号に対して、適当量の位相の調整によって与えられる。特に、磁気軸受の外力/変位の伝達特性から、回転体の振れ回りの抑制に好適な位相の変化量が得られる。即ち、従来のサーボ制御構成でのパワーアンプ入力信号に対する変位センサ出力信号の伝達特性(利得、位相)データを参考にし、第二の制御ユニット内の位相調整器の設定値を決定し、得られた第二の制御ユニット出力信号を第一の制御ユニット出力信号に加えて、パワーアンプユニットに入力して、電磁石の電流を制御することによって達成される。
【0011】
又、本発明によれば、変位センサユニットからのセンサ信号のうち振幅に関する情報を切り離して、位相に関する情報のみを取り出して所望の位相量を変化させると共に任意のゲインを与えることができ、これにより回転体の振れ回りの抑制に好適な電磁石の制御力を供給することができる。ここで、前記ゲイン調整器は、回転数に比例したゲインを与える回転数比例ゲイン調整器を含むものであることが好ましい。
【0012】
又、請求項3に記載の発明は、前記第二の制御ユニットには、可変周波数フィルタと、モータ回転数に対応した回転体の振れ回りの抑制に好適な位相の変化量を与える手段とを備えたことを特徴とする。これにより、可変周波数フィルタによるモータ回転数に対応したセンサ信号を取り出し、その取り出した信号に対して回転体の振れ回りの抑制に好適な位相の変化量を与えることで、任意の回転速度に対して適当な位相量の調整を行うことができる。従って、広い回転速度範囲で回転体の振れ回りを小さくすることができる。
【0013】
又、前記モータ回転数に対応した位相の変化量は、前記磁気軸受の外力/変位の伝達特性から、回転数に対応させて位相の変化量を記憶した記憶器と、該記憶器から読み出して位相を調整するようにしたものであることが好ましい。これにより任意の回転速度に対応した振れ回りの抑制に好適な位相の変化量を与えることができる。
【0014】
又、前記モータ回転数に対応した位相の変化量は、前記磁気軸受の外力/変位の伝達特性を近似させた演算回路を用いて与えるようにしてもよい。これにより、上述のような高価な記憶器等を用いずに、簡単なアナログ回路により振れ回りの抑制に好適な位相の変化量を与えることができる。
【0015】
又、請求項6に記載の発明は、前記第二の制御ユニット内の信号の流れをオン・オフする信号スイッチを備え、更に前記センサ信号と基準信号とを比較し、該比較した結果により前記信号スイッチをオン・オフする第三の制御ユニットを備えたことを特徴とする。回転体の振れ回りが大きい状態で第二の制御ユニットよりの信号をオン状態にすることで回転体の振れ回り運動を抑制することができる。そして、回転体の振れ回りが小さな場合には、第二の制御ユニットからの信号をオフすることにより、通常の第一の制御ユニットからの補償信号の生成のみで十分な回転体の浮上保持ができる。
【0016】
又、第二の制御ユニット内のコンパレータを含む信号形成器の後段に、更に第二の回転周波数成分を抽出するフィルタを備えることが好ましい。これにより第二の制御ユニットからの出力信号を矩形波からその高調波成分を除去した低次の正弦波とすることができ、高調波による雑音発生等の障害を防止することができる。
【0017】
又、第二の制御ユニット内の信号スイッチを入れる前のセンサ出力と該信号スイッチを入れた時の前記センサ出力とを比較し、ゲイン調整器のゲイン設定値を変更する指令値を出力する第五の制御ユニットを備えることが好ましい。これにより、第二の制御ユニットよりの信号をオン状態とするに際して、そのゲイン調整器のゲインを適切な値に設定することが可能となり、振れ回りの抑制に好適なゲインを与えることが可能となる。
【0018】
【発明の実施の形態】
以下、本発明の実施の形態について図2乃至図29を参照しながら説明する。尚、各図中同一符号は同一又は相当部分を示す。
【0019】
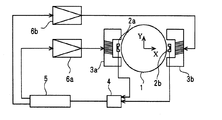
図2は、図1に示す基本構成に加えて、第二の制御ユニット7を備えた磁気軸受装置の制御系の構成例を示す。この制御形磁気軸受装置は、従来の図1に示す磁気軸受装置の基本構成に対して、第二の制御ユニット7を第一の制御ユニット5に対して並列に備え、その出力を信号合成器(加算器)8にて第一の制御ユニットの出力と加算して合成するようにしている。その他の構成は、図1に示す基本的な制御形磁気軸受装置の構成と同様である。図3は、図2に示す制御系をモデル化してブロック図で示したものである。ここで磁気軸受は、回転体の質量Mと、磁気軸受合剛性Kuから、図示するような関数でもっとも単純な系として表現される。尚、Sはラプラス演算子を示している。
【0020】
図4は、第二の制御ユニット7内の構成例を示す。第二の制御ユニット7は、バッファアンプ7aと、回転周波数成分抽出器7bと、位相(移相)調整器7cと、コンパレータを含む信号形成器7dと、ゲイン調整器7eとから構成されている。ここでは、変位センサ信号からバッファアンプ7aで増幅後に回転周波数成分を抽出するフィルタである回転周波数成分抽出器7bを備える。そして、抽出された信号の位相を位相調整器7cで調整し、その調整器出力と基準電位とを比較するコンパレータにより0Vに対して正負方向に振れる信号を形成し、ゲイン調整器7eで出力信号の振幅を調整した信号を合成器(加算器)8に対して出力する。即ち、変位センサ出力信号を回転周波数信号抽出器を通してモータ回転数に対応した信号成分を抽出し、更に位相調整器で任意の位相(移相)調整量を与え、得られた信号をコンパレータを含む信号形成器7dで受ける。コンパレータで受けることにより、信号のモータ回転数に対応した周波数と位相情報は下流に伝達されるが、振幅情報は遮断される。尚、この信号処理が必要なため、コンパレータを使用した信号形成器としている。
【0021】
図5は、第二の制御ユニット7のバッファアンプ7a、周波数成分抽出器7b、位相調整器7cの具体的な回路構成例を示す。図示するように、汎用の演算増幅器とCR素子などで簡素に構成されている。バッファアンプ7aは、演算増幅器を用いたアンプであり、回転周波数成分抽出器7bは、演算増幅器とCR素子とを組み合わせたフィルタ回路である。位相調整器7cも、同様に演算増幅器とCR素子とを組み合わせた回路であり、接地側に接続されたボリュームの調整により位相量の調整が可能である。これらの回路では、変位センサからの回転信号に同期した周波数成分の正弦波が取り出され、所望量の位相が位相調整器のボリュームの調整により行われる。即ち、可変抵抗器のボリューム調整で0〜180[deg]の位相調整が可能である。
【0022】
図6は、コンパレータを含む信号形成器7dとゲイン調整器7eとの回路構成例と、各部の信号波形を示す。信号形成器7dは、図示するような比較器71a,71bと符号反転を行う演算増幅器72a,72bとを組合わせた回路であり、後述するように0V(接地電位)に対して+側及び−側に振れた出力信号を形成する。そしてゲイン調整器7eは、同様に演算増幅器72cからなるアンプである。位相調整器7cの出力は、▲1▼に示すように正弦波であり、この信号はコンパレータ71aにより基準電位と比較され、▲2▼に示すように矩形波状の波形を出力する。そして、位相調整器7cの出力は分岐され、反転器72a、コンパレータ71bに入力され、その波形が▲3▼に示すように▲2▼と反転した矩形波状の波形が得られる。そしてこの波形を更に反転器72bで反転させ、この波形が▲4▼で示すようになる。そして、これをゲイン調整器7eのアンプ72cで振幅を調整すると共に合成することにより、▲5▼に示すような接地電位を中心として上下に振れる矩形波が形成される。尚、このゲイン調整器7eは、図1に示す従来の制御装置では、電磁石を駆動する電力増幅回路内に配置されていたものを兼用している。上述した第二の制御ユニット7の回路構成例から明らかなように、変位センサユニットからのセンサ信号の周波数と位相に関する情報のみが取り出され、その位相を調整して第一の制御ユニット5の信号に合成器8で加算するようにしたものである。従って、センサ信号の振幅に関する情報は下流側には伝達されない。
【0023】
そして、第二の制御ユニット7内の回転周波数信号抽出器7bは、例えば、図5に示したアナログ回路によるバンドパスフィルタでもよいし、市販機能モジュールの電圧同調型バンドパスフィルタでもよい。この電圧同調型バンドパスフィルタは、外部からの電圧信号0〜10(V)に対応する中心周波数に通過周波数を調整できる。例えば、株式会社エヌエフ回路設計ブロックのカタログNo.D98X−D16−23A2記載の型式VT−2BPA、デイテル株式会社のデータシートNo.85/9/5K/13.2記載の型式FLJ−VB等がこれに相当する。
【0024】
図7は、信号形成器7dの変形例を示す図である。図6に示す信号形成器がコンパレータ及び演算増幅器を数個使用していたのに対して、2個の演算増幅器で同等の機能を有する回路を構成できる。即ち、(a)に示す回路構成で、符号77は、演算増幅器を使用したコンパレータであり、符号78は同様に演算増幅器を使用した反転アンプ(インバータ)である。ここでコンパレータ77は、(b)又は(c)に示すような入力・出力特性を有する非線形要素を用いている。このような入出力特性を有するコンパレータを用いることにより、図6に示した信号形成器に対して極めて簡単な回路構成で(d)に示すように、正弦波入力信号▲1▼に対して、0ボルトを中心に正負側に振れる矩形波信号▲5▼を形成することができる。そして図6に示す回路と同様にセンサ信号の周波数成分及び位相成分のみを下流側に伝達し、振幅成分を下流側に伝達しない構成とすることができる。
【0025】
図8は、第二の制御ユニット内にスイッチ7fを設け、更に第三の制御ユニット9を備え、変位信号と基準信号とを比較し、基準値以上の場合、即ち、振れ回りが所定値(基準値)よりも大きな場合には、スイッチ7fをオンするようにしたものである。
【0026】
即ち、第二の制御ユニット7内の信号の流れをオン・オフする信号スイッチ7fを備え、更に変位センサの出力信号と基準信号とを比較し、信号スイッチ7fをオン・オフする第三の制御ユニット9を備える。これにより、変位センサ信号が所定の基準値以上である場合にのみ、第二の制御ユニットの出力信号が第一の制御ユニットの出力信号に加算される。図9は、第三の制御ユニット9内の構成例を示す。第三の制御ユニット9は、図示するように比較器73a,73b、反転アンプ74、反転器75a,75b、及び加算器76から構成される。
【0027】
図10は、第四の制御ユニット10を備え、モータコントローラからの回転数に比例した電圧信号と基準信号とを比較して、基準信号以上の場合には、スイッチ7fをオンする構成を示している。この第四の制御ユニット10は、実回転数信号と基準信号を比較する比較器10aと、第二の制御ユニット内に設けられた信号の流れをオン・オフする信号スイッチ7fに対してオン・オフ指令信号を発生する信号発生器10bとを備えている。これにより、図8に示す実施の形態が変位センサの信号を基準として、第二の制御ユニット7内の信号スイッチ7fのオン・オフを行っていたのに対して、モータコントローラからの回転数信号を基準として、即ち、モータの回転数が所定値以上に大きくなった場合には、第二の制御ユニット7内の信号スイッチ7fのオン・オフを行うことができる。
【0028】
図11は、第二の制御ユニット内の構成の変形例を示す。(a)は、第二の制御ユニット7内のコンパレータを含む信号形成器7dの後段に、回転周波数信号抽出器7bと同じ機能のフィルタである回転周波数成分抽出器7b’を備えている。これにより、矩形波状信号から回転周波数に同期した低次の正弦波状信号にすることができる。従って、矩形波信号を制御出力として、パワーアンプに入力した時よりも回転体の振れ回り抑制効果は多少低下するが、高調波成分の電流を流さないようにできるため、回転体の高次モードを励振せずにすむ。(b)は、(a)に対して回転周波数成分抽出器7b’とゲイン調整器7eの位置を入れ替えたものである。同様に(c)は、図8に示すように信号の流れをオン・オフする信号スイッチ7fを第二の制御ユニット7内に設けたものである。更に、回転数に非同期の固有振動数をもつ外力が回転体に作用する場合は、第二の制御ユニット7内の回転周波数信号抽出器7b,7b’をその固有の振動数信号抽出器にすればよい。
【0029】
図12は、第五の制御ユニット11を備え、変位センサ出力を観測し、第二の制御ユニット内の信号スイッチ7fをオン時、オフ時の変位センサ振幅を比較し、ゲイン調整器7eの大きさの設定をするようにしたものである。第二の制御ユニット内の信号スイッチ7fを入れる前の(制御オフ時の)変位センサ出力と、該信号スイッチを入れた時の(制御オン時の)変位センサ出力とを比較して、ゲイン調整器7eのゲイン設定値を変更する第五の制御ユニット11を備えている。これにより、モータ回転数が所定値以上に達すると、第四の制御ユニット9によりスイッチ7fがオン状態となり、振れ回りの抑制が行われるが、ゲイン調整器7eに適切なゲインを設定することが可能となる。従って、振れ回りを一層抑制することができる。
【0030】
図13は、第六の制御ユニットを備え、モータコントローラからの回転数に比例した電圧信号と変位センサ信号を入力し、回転数毎に予め位相調整器に設定しておき、モータ回転数に対応した位相調整量を位相調整器7cに設定するようにしたものである。この時、回転周波数成分抽出器7bは、電圧値を変化することで可変周波数のフィルタ回路を用いる。これによりモータ回転数に対応した周波数成分の抽出が可能である。
図14は、第六の制御ユニット内に従来のサーボ制御構成でのパワーアンプ入力信号に対する変位センサ出力信号の伝達特性(利得、位相)データを計測して記憶器に内蔵している。そして、モータ回転数に対応した位相調整量を記憶したデータから読み出し、位相調整器7cに設定するようにしたものである。これにより、任意のモータ回転速度に対してそれぞれに対応した位相の変化量を付与することができ、低速から高速に至る全領域に対して振れ回りの抑制が可能となる。
【0031】
図15は、第六の制御ユニットの変形実施例を示すものである。図14に示す第六の制御ユニットが磁気軸受の伝達特性のデータを記憶器に内蔵しているのに対し、図15に示す第六の制御ユニットは磁気軸受の伝達特性をアナログ回路で模擬したものである。図15(a)に示すように演算増幅器とCR素子とからなる一次フィルタ回路を2段用いて、(b)のゲイン特性及び(c)の位相特性を形成している。ここでキャパシタ素子C’は広域ゲインを落とし、演算増幅器の動作を安定化させるためのものである。又、この回路構成は通常のPID制御の微分要素(位相進み回路)としても一般に使用されているものである。この(b)及び(c)に示す特性は、後述の図17に示す磁気軸受の伝達特性を模擬したものである。そして、例えば50Hzに対して約90〜100deg程度の位相の変化量を与えるものである。そして25Hzでは約65deg程度の位相の変化量を与えることができる。そしてこの範囲において図示するようにゲインは殆ど平坦である。
【0032】
以下に実機を用い、上記各制御装置を動作させた結果について説明する。
図16は、磁気軸受で支持されたモータ本体の構造例を示す。以下に述べる検証実験は、図中のラジアル磁気軸受32を使用する。図16は、磁気浮上式スピンドライヤの試作機の一部分である。この機械は、回転軸15がアキシャル磁気軸受33及びラジアル磁気軸受32によりそれぞれアキシャル方向及びラジアル方向に支持されており、モータ31により回転駆動される。下側に位置するウエハホルダ35に25枚の8インチウエハを搭載する。ウエハWは、外周を2本の固定バーと脱着可能な可動バー1本の計3本の梁で支持されている。そのため、ウエハの位置ずれによる不釣り合い量と梁の変形による不釣り合い量が作用するものである。
【0033】
図17は、一つのラジアル磁気軸受のサーボ制御系の特性(パワーアンプ入力に対する変位センサ出力応答)の実測例を示す。これは、外乱として回転体に作用する外力(R)とこれに対応した回転体の変位(S)に対する比R/Sに対応している。即ち、分母に変位センサ出力信号(S)、分子に計測のためにパワーアンプ入力信号に加算した信号(R)とし、横軸を周波数軸、縦軸に利得(ゲイン)と位相(フェイズ)を記している。
このゲイン特性に既知である変位センサ感度を定数:Ks(V/m)、パワーアンプゲイン:Kd(A/V)、電磁石ゲイン:Kc(N/A)をかけると(図3を参照)、磁気軸受剛性の周波数特性相当になるが実際には、それぞれの周波数応答があるため厳密ではない。
実際にスピンドライヤとして運転される周波数範囲は、0〜50Hz(0〜3000rpm)であり、位相特性としては、50Hzで108deg、25Hzで65deg程度の値となっていることが判る。
【0034】
ここで注目したいのは、位相特性、即ち、回転動作周波数における位相情報である。この位相情報が、第二の制御ユニット内の位相調整器に設定する調整量の元になる。ここで、「元になる」としたのは、
(1)パワーアンプの入力電圧(V)に対する出力電流(A)の非線型性があり、入力電圧が大きくなると、利得と位相で示した周波数応答は顕著に劣化する場合がある。
つまり、回転体の振れ回り振幅が大きくなっている時は、図17に示した位相特性にパワーアンプの周波数応答劣化分を補正する必要もある。また、
(2)第二の制御ユニット出力がパワーアンプに入力されて、最終的に力として回転体に作用するまでの周波数特性を同じく考慮する必要もある。ただし、比較的低い周波数ではさほどの影響はなく、先の位相特性値相当の値を使用すればよい。実験の結果によれば、補正量は概略値でも得られる効果は同等であった。
【0035】
図18乃至図21はオープンバランス制御相当の試験をした結果を示す。この試験の目的は、加え合わせる制御信号と変位センサ信号との与えるべき位相差が、図17に示した磁気軸受剛性の周波数特性相当データの位相データを元に、推定した値相当で効果が得られることの検証である。制御信号は、市販の信号発生器で発生させた。図18及び図19は、回転数3000rpm(50Hz)での(a)変位センサ出力信号と(b)制御信号(第二の制御ユニットの出力信号)である。図18は制御オフ時、図19は制御オン時の時間波形である。与えた位相量は概略108(deg)である。図示していないが、この位相量を多少上下に変動させてみたが、効果はさほどの変化は確認できなかった。
【0036】
図20及び図21は、回転数1500rpm(25Hz)での変位センサ出力信号と制御信号である。図20は制御オフ、図21は制御オン時の時間波形である。与えた位相量は概略64.8(deg)である。これもまた、図示していないが、この位相量を多少上下に変動させてみたが、効果はさほどの変化は確認できなかった。
【0037】
次に、図4乃至図6に示した第二の制御ユニットを使用して、振れ回りの抑制作用を検証した結果を図22及び図23に示す。回転数は3000rpmであり、(a)変位センサ出力信号と、(b)制御信号とをそれぞれ示している。図22は制御オフ時、図23は制御オン時の時間波形である。図18乃至図21で示した結果と同等の結果が得られている。この実験に用いた図4の回路の入力信号と出力信号の伝達特性を図26に示す。位相調整量は、3000rpm(50Hz)に対して約90〜100deg進みとなっていることが判る。
【0038】
更に、不釣り合い重りを増やし、従来のサーボ制御ではタッチダウンしてしまうケースについて、第二の制御ユニットによる作用を検証した結果を図24及び図25に示す。この場合、回転軸に直交するX軸とY軸平面の2つのサーボ制御系に、第二の制御ユニットをそれぞれ備え実験した。回転数は3000rpm、上段にX軸変位センサ出力信号、下段にY軸変位センサ出力信号の時間波形を記す。図24は制御オン状態、図25はタッチダウンしながら回転している状態に本制御をオンした時の時間波形である。いずれも、振れ回りを抑える作用が確認できる。この2例の実験で用いた位相量を図17の位相データと比較すると、概略20%増しぐらいであることがわかる。更に、図12に示すように、第二の制御ユニット内のゲイン調整器の設定を調整することで、振れ回り振幅を抑制できる。作用の上限はパワーアンプの基本性能と電磁石の磁路の磁気飽和具合によって決まる。
【0039】
図27乃至図29は、回転数変動の急峻な場合でも、本発明の回路構成によれば、図16に示すウエハスピンドライヤにおいて、回転体の振れ回りを十分に抑制できることを示している実験データである。図27は、第二の制御ユニットの構成例を示す。入力信号はバッファアンプ7aで増幅され、回転数同期信号抽出器7bで回転数に対応した信号の成分が抽出される。この抽出器として、例えばNF回路設計社製の型式VT−2BPAが用いられる。そして位相調整器7cで位相の調整量が与えられる。得られた信号をコンパレータ7dで基準電圧と比較することにより、振幅情報は遮断され、モータ回転数に対応した周波数と位相情報のみが下流側に伝達される。そしてゲイン調整器7e、7fでゲインを調整し、第一の制御ユニット5の信号出力に加算し、電磁石に制御電流を供給している。ここでゲイン調整器7eは、回転速度に無関係な固定のゲイン調整器であり、ゲイン調整器7fは回転数に比例したゲインを与える回転数比例ゲイン調整器であり、例えばアナログデバイス社製の型式AD633が用いられる。
【0040】
図28は、回転数がゼロから所定速度迄急峻に立ち上がり、2400rpm程度の高速(所定速度)で、一定時間の運転を行い、次に急峻に減速して停止する場合のウエハスピンドライヤにおける回転体の振れ回りの状況を示している。図示するように、回転スタート時からバランス制御をオンすることにより、急峻な立ち上がり時期にも回転体の振れ回りはTD(Touch Down)レベルに対して十分な余裕があることが判る。そして、高速回転時にバランス制御をオフすると、変位センサ出力(a)(b)に示されるように回転体の振れ回りはTD(Touch Down)レベルまで増大することが判る。更に、急峻な立ち下がり時においても、回転体の大きな振れ回りを生じることなく回転体の回転が停止する。
【0041】
図29は、図28と同様な急峻な立ち上がり及び立ち下がり時の回転体の振れ回りの様子を示す。この場合は、3000rpmまで回転速度を上昇させている。この場合にも、上述と同様に回転体の振れ回りはTD(Touch Down)レベルよりも十分な余裕があり、振れ回りが十分に抑制されていることが判る。この場合は、バランス制御をオフにすると、急峻な立ち上がり時にTD(Touch Down)レベルまで振れ回りが大きくなるが、はじめからバランス制御をオンしておくことにより、急峻な立ち上がり時においても変位センサ(No.1)に示すように振れ回りが多少大きくなる程度に抑圧することができる。なお、変位センサ(No.1)はウエハホルダに近い方のラジアル磁気軸受に設けられたセンサであり、変位センサ(No.2)はウエハホルダから離れた側のラジアル磁気軸受に設けられたセンサである。
【0042】
以上に示したように、第二の制御ユニットをそれぞれ必要な制御軸へ付加することで、1)過大な不釣り合い量を持つ持つ回転体の支持問題、2)回転体の浮上位置を起因とするモータからの回転運動に同期した外力の支持問題、3)モータの原理に基づく回転数に同期したラジアル外力の支持問題、について磁気軸受の許容支持特性を改善し、回転体の振れ回りを抑制できることが判る。
【0043】
例えばモータが2極の誘導モータであった場合、回転数に同期したラジアル外力が発生する。この場合、ファンやポンプ等の回転運動により流体力を発生させる回転機械では、負荷変動に追従した回転運動を維持するために、モータへの入力電力が増加し、より過大なラジアル外力が発生する。転がり軸受や滑り軸受で支持すれば、寿命の低下こそあれ、回転体の支持不能に陥ることは考えられない。しかしながら、接触式軸受を使用できない場合も少なくなく、特殊な環境用の回転機械に磁気軸受を適用した場合には、上記問題に直面することがある。更に高速回転によってウエハ等を乾燥させるスピンドライヤにおいても、被乾燥物が起因となる不釣り合い量の大きさが、通常の磁気軸受支持剛性と比較すると過大な量である場合がある。
【0044】
従来の転がり軸受や滑り軸受の支持剛性であれば別であるが、半導体装置用でウエハをバッチ処理(25×n枚)するスピンドライヤでは、必要に応じて磁気軸受の採用を望まれることがあり、同じく前に述べた問題に直面することがある。このように、従来の転がり軸受などを使用していたところに、非接触支持できる磁気軸受を使用したい場合には、既に全体のスペース、軸受のスペース、回転体の構造が決まっているため、必要にして十分な大きさの磁気軸受を組込むことが難しいが、上記本発明によれば係る問題の解決が可能であり、磁気軸受の限界性能を拡大する一つの手法を提供できる。
【0045】
【発明の効果】
以上に説明したように、本発明によれば、回転体の浮上位置制御に用いる変位センサ信号のみから、磁気軸受で支持された過大な不釣り合い量を有する回転体の振れ回りを抑制することができる。
【図面の簡単な説明】
【図1】制御形磁気軸受装置の基本的な構成を示す図である。
【図2】本発明の実施の形態の制御形磁気軸受装置の構成を示す図である。
【図3】図2の制御系のモデルを示すブロック図である。
【図4】図2における第二の制御ユニットの構成を示す図である。
【図5】バッファアンプ、周波数成分抽出器、位相調整器の回路構成例を示す図である。
【図6】信号形成器及びゲイン調整器の回路構成例及び各部の信号波形を示す図である。
【図7】信号形成器の変形例を示す図である。
【図8】信号をオン・オフするスイッチを備えた第二の制御ユニットの構成例を示す図である。
【図9】第三の制御ユニットの回路構成例を示す図である。
【図10】第四の制御ユニットにより信号をオン・オフする制御ユニットの構成例を示す図である。
【図11】第二の制御ユニット内に第二の周波数成分抽出器を備えた場合の構成例を示す図である。
【図12】ゲインを調整する第五の制御ユニットを備えた制御ユニットの構成例を示す図である。
【図13】広い速度範囲に対応可能な制御ユニットを備えた制御形磁気軸受装置の構成例を示す図である。
【図14】第六の制御ユニット内の構成例を示す図である。
【図15】広い速度範囲に対応可能な位相調整器の構成例を示す図である。
【図16】磁気軸受で支持されたウエハスピンドライヤの構成を示す図である。
【図17】ラジアル磁気軸受のサーボ制御系の力/変位の伝達特性例を示す図である。
【図18】オープンバランス制御相当の試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オフの場合を示す。
【図19】オープンバランス制御相当の試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オンの場合を示す。
【図20】オープンバランス制御相当の試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オフの場合を示す。
【図21】オープンバランス制御相当の試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オンの場合を示す。
【図22】本発明の制御ユニットによる試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オフの場合を示す。
【図23】本発明の制御ユニットによる試験結果を示す図であり、(a)変位センサ出力、(b)制御出力信号を示し、制御オンの場合を示す。
【図24】本発明の制御ユニットによる試験結果を示す図であり、X軸及びY軸の制御オン時の変位センサ出力を示す図である。
【図25】本発明の制御ユニットによる試験結果を示す図であり、X軸及びY軸の制御オフから制御オン時の変位センサ出力を示す図である。
【図26】図4乃至図6に示す制御回路のゲイン及び位相の周波数特性例を示す図である。
【図27】本発明の実施の形態の第二の制御ユニットの構成例を示す図である。
【図28】図27に示す第二の制御ユニットを用いたウエハスピンドライヤにおける、急峻な立上り/立下り、及び高速回転時の回転体の振れ回り特性の実験データを示す図である。
【図29】図27に示す第二の制御ユニットを用いたウエハスピンドライヤにおける、急峻な立上り/立下り、及び高速回転時の回転体の振れ回り特性の他の実験データを示す図である。
【符号の説明】
1 回転体
2a,2b 変位センサ
3a,3b 電磁石
4 センサアンプ
5 第一の制御ユニット
6a,6b パワーアンプユニット
7 第二の制御ユニット
8 信号合成器
9 第三の制御ユニット
10 第四の制御ユニット
11 第五の制御ユニット
12 第六の制御ユニット
Claims (9)
- 回転体を支持する制御形磁気軸受装置であって、回転体の運動情報を検出するセンサユニットと、そのセンサ信号に基づき制御信号を演算する第一の制御ユニットと、該制御ユニット信号に基づき電流を駆動するパワーアンプユニットと、磁気力を発生する電磁石とを備えた、回転体をラジアル方向に支持する磁気軸受装置において、
前記第一の制御ユニットと並列に第二の制御ユニットを備え、前記センサ信号を該第二の制御ユニットへ導入し、該第二の制御ユニット内では、前記センサ信号からその位相を変化させた信号を生成し、前記第二の制御ユニットにおける位相の変化量は、前記磁気軸受の外力/変位の伝達特性から、前記回転体の振れ回りを抑制する位相の変化量を与えるものであり、
該第二の制御ユニットの出力信号を前記第一の制御ユニットの出力信号に加え、該加算した出力信号に基づき、前記電磁石の電流を制御するようにし、
前記第二の制御ユニットには、前記センサ信号から回転周波数成分を抽出するフィルタと、該フィルタ出力信号の位相を調整する位相調整器と、該位相調整器出力と基準電位とを比較するコンパレータを含む信号形成器と、該信号形成器出力信号の振幅を調整するゲイン調整器とを備えたことを特徴とする制御形磁気軸受装置。 - 前記ゲイン調整器は、回転数に比例したゲインを与える回転数比例ゲイン調整器を含むものであることを特徴とする請求項1に記載の制御形磁気軸受装置。
- 前記第二の制御ユニットには、可変周波数フィルタと、モータ回転数に対応した回転体の振れ回りの抑制に好適な位相の変化量を与える手段とを備えたことを特徴とする請求項1に記載の制御形磁気軸受装置。
- 前記モータ回転数に対応した位相の変化量は、前記磁気軸受の外力/変位の伝達特性から、回転数に対応させて記憶した記憶器と、該記憶器から読み出して位相を調整するようにした位相調整器とを備えたものであることを特徴とする請求項3に記載の制御形磁気軸受装置。
- 前記モータ回転数に対応した位相の変化量は、前記磁気軸受の外力/変位の伝達特性を近似させた演算回路を用いたものであることを特徴とする請求項3に記載の制御形磁気軸受装置。
- 請求項1乃至5のいずれかの制御形磁気軸受装置において、
前記第二の制御ユニット内の信号の流れをオン・オフする信号スイッチを備え、更に前記センサ信号と基準信号とを比較し、該比較した結果により前記信号スイッチをオン・オフする第三の制御ユニットを備えたことを特徴とする制御形磁気軸受装置。 - 請求項1乃至5のいずれかの制御形磁気軸受装置において、
前記第二の制御ユニット内の信号の流れをオン・オフする信号スイッチを備え、実回転数信号と基準信号を比較する比較器と、前記信号スイッチをオン・オフする指令信号を発生する信号発生器とを含む第四の制御ユニットを備えたことを特徴とする制御形磁気軸受装置。 - 請求項1乃至7のいずれかの制御形磁気軸受装置において、
第二の制御ユニット内のコンパレータを含む信号形成器の後段に、更に第二の回転周波数成分抽出器を備えたことを特徴とする制御形磁気軸受装置。 - 請求項1乃至7のいずれかの制御形磁気軸受装置において、
第二の制御ユニット内の信号スイッチを入れる前のセンサ出力と該信号スイッチを入れた時の前記センサ出力とを比較し、ゲイン調整器のゲイン設定値を変更する指令値を出力する第五の制御ユニットを備えたことを特徴とする制御形磁気軸受装置。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP14470199A JP4036567B2 (ja) | 1999-01-27 | 1999-05-25 | 制御形磁気軸受装置 |
| KR1020007010700A KR100622098B1 (ko) | 1999-01-27 | 2000-01-21 | 제어형 자기 베어링장치 |
| US09/647,169 US6515387B1 (en) | 1999-01-27 | 2000-01-21 | Controlled magnetic bearing device |
| EP00900852A EP1065395B1 (en) | 1999-01-27 | 2000-01-21 | Controlled magnetic bearing device |
| PCT/JP2000/000272 WO2000045059A1 (fr) | 1999-01-27 | 2000-01-21 | Dispositif de support magnetique commande |
| DE60042253T DE60042253D1 (de) | 1999-01-27 | 2000-01-21 | Steuerbares magnetlager |
| TW089101141A TW436586B (en) | 1999-01-27 | 2000-01-25 | Controlling type magnetic bearing device |
| US10/316,048 US6809449B2 (en) | 1999-01-27 | 2002-12-11 | Controlled magnetic bearing apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP11-18720 | 1999-01-27 | ||
| JP1872099 | 1999-01-27 | ||
| JP14470199A JP4036567B2 (ja) | 1999-01-27 | 1999-05-25 | 制御形磁気軸受装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000283159A JP2000283159A (ja) | 2000-10-13 |
| JP2000283159A5 JP2000283159A5 (ja) | 2004-11-11 |
| JP4036567B2 true JP4036567B2 (ja) | 2008-01-23 |
Family
ID=26355446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP14470199A Expired - Lifetime JP4036567B2 (ja) | 1999-01-27 | 1999-05-25 | 制御形磁気軸受装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US6515387B1 (ja) |
| EP (1) | EP1065395B1 (ja) |
| JP (1) | JP4036567B2 (ja) |
| KR (1) | KR100622098B1 (ja) |
| DE (1) | DE60042253D1 (ja) |
| TW (1) | TW436586B (ja) |
| WO (1) | WO2000045059A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004027129A2 (en) * | 2002-09-23 | 2004-04-01 | Auburn University | A ring-spinning system for making yarn having a magnetically-elevated ring |
| JP4476694B2 (ja) * | 2003-06-25 | 2010-06-09 | 株式会社荏原製作所 | 磁気軸受装置および磁気軸受装置を備えた流体機械 |
| EP1621785A1 (en) * | 2004-07-30 | 2006-02-01 | Mecos Traxler AG | Method and apparatus for controlling a magnetic bearing device |
| DE102005001494A1 (de) * | 2005-01-12 | 2006-07-20 | Siemens Ag | Regelverfahren für eine Magnetlagerung und hiermit korrespondierende Einrichtung |
| US8272265B2 (en) * | 2005-07-12 | 2012-09-25 | Technion Research And Development Foundation Ltd. | System and method for active detection of asymmetry in rotating structures |
| KR20090091300A (ko) * | 2006-12-19 | 2009-08-27 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 자기 부상에서 음의 감쇠 보상을 위한 제어 시스템 및 방법 |
| EP2006556B1 (en) * | 2007-06-18 | 2013-11-13 | Mecos Traxler AG | Recovery of impact in a magnetic bearing device |
| SG189798A1 (en) * | 2008-04-17 | 2013-05-31 | Synchrony Inc | High-speed permanent magnet motor and generator with low-loss metal rotor |
| AU2009246773A1 (en) | 2008-04-18 | 2009-11-19 | Synchrony, Inc. | Magnetic thrust bearing with integrated electronics |
| US9583991B2 (en) * | 2009-06-24 | 2017-02-28 | Synchrony, Inc. | Systems, devices, and/or methods for managing magnetic bearings |
| CZ302646B6 (cs) * | 2009-08-26 | 2011-08-10 | Rieter Cz S.R.O. | Zpusob stabilizace levitujícího rotujícího elementu a zarízení pro stabilizaci levitujícího rotujícího elementu |
| DE102009029129A1 (de) * | 2009-09-02 | 2011-03-03 | BSH Bosch und Siemens Hausgeräte GmbH | Kältegerät mit einer Halteklammer für einen Lüftermotor |
| US8304947B2 (en) * | 2010-06-21 | 2012-11-06 | Empire Technology Development Llc | Electro-actuated magnetic bearings |
| US8987959B2 (en) | 2010-06-23 | 2015-03-24 | Dresser-Rand Company | Split magnetic thrust bearing |
| CN102107375B (zh) * | 2010-11-26 | 2013-01-02 | 北京工业大学 | 一种基于负刚度原理的磨削工艺系统刚度补偿机构 |
| US9633890B2 (en) * | 2011-12-16 | 2017-04-25 | Lam Research Ag | Device for treating surfaces of wafer-shaped articles and gripping pin for use in the device |
| US9250017B2 (en) | 2012-03-16 | 2016-02-02 | Jerry D. Miller | Magnet supported rotary drum dryer |
| FR2997465B1 (fr) | 2012-10-31 | 2015-04-17 | Ge Energy Power Conversion Technology Ltd | Palier magnetique actif comprenant des moyens d'amortissement des deplacements radiaux d'un arbre d'une machine tournante |
| US9197110B2 (en) * | 2013-03-14 | 2015-11-24 | Lawrence Livermore National Security, Llc | Electrostatic stabilizer for a passive magnetic bearing system |
| EP2818739B1 (en) * | 2013-06-28 | 2018-06-13 | Skf Magnetic Mechatronics | Improved active magnetic bearings control system |
| US9410554B2 (en) | 2014-04-04 | 2016-08-09 | Solar Turbines Incorporated | Controlling a gas compressor having multiple magnetic bearings |
| PL2933512T3 (pl) * | 2014-04-14 | 2017-11-30 | Abb Schweiz Ag | Układ łożyska magnetycznego i sposób działania układu łożyska magnetycznego |
| JP7148230B2 (ja) * | 2017-08-31 | 2022-10-05 | エドワーズ株式会社 | 真空ポンプ及び制御装置 |
| JP7119312B2 (ja) * | 2017-09-04 | 2022-08-17 | 株式会社島津製作所 | 磁気軸受制御装置および真空ポンプ |
| JP7093683B2 (ja) * | 2018-06-15 | 2022-06-30 | 川崎重工業株式会社 | 磁気軸受制御装置および磁気軸受制御方法 |
| CN109854622B (zh) * | 2019-03-26 | 2020-04-28 | 中国船舶科学研究中心(中国船舶重工集团公司第七0二研究所) | 一种基于智能材料可控制轴系径向振动的主动磁轴承系统 |
| DE102019112735A1 (de) | 2019-05-15 | 2020-11-19 | Maschinenfabrik Rieter Ag | Verfahren zur Identifikation eines Spinnrotors an einer Rotorspinnmaschine sowie Rotorspinnmaschine |
| CN112460146A (zh) * | 2019-09-06 | 2021-03-09 | 北京亚之捷环保科技有限责任公司 | 一种主动式磁悬浮转子跌落保护系统 |
| KR102371862B1 (ko) * | 2020-06-25 | 2022-03-08 | 숭실대학교 산학협력단 | 동축 와전류 변위 센서를 갖는 자기베어링 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2336603A1 (fr) * | 1975-12-24 | 1977-07-22 | Europ Propulsion | Dispositif d'amortissement des frequences critiques d'un rotor suspendu magnetiquement |
| JPS5989821A (ja) | 1982-11-11 | 1984-05-24 | Seiko Instr & Electronics Ltd | 制御形磁気軸受装置 |
| FR2561738B1 (fr) * | 1984-03-26 | 1986-08-22 | Europ Propulsion | Procede et dispositif de reduction des vibrations des machines tournantes equipees d'une suspension magnetique active |
| JPS60245443A (ja) * | 1984-05-18 | 1985-12-05 | Ntn Toyo Bearing Co Ltd | 制御式ラジアル磁気軸受装置 |
| JPS6166540A (ja) * | 1984-09-08 | 1986-04-05 | Ntn Toyo Bearing Co Ltd | 磁気軸受の制御装置 |
| JPS61218427A (ja) | 1985-03-25 | 1986-09-27 | Mitsubishi Electric Corp | 車両の振動制御装置 |
| US4795927A (en) * | 1986-05-02 | 1989-01-03 | Mitsubishi Jukogyo Kabushiki Kaisha | Control system for a magnetic type bearing |
| JPH0637895B2 (ja) | 1986-09-12 | 1994-05-18 | 株式会社日立製作所 | 電磁軸受制御装置 |
| JPS63285321A (ja) | 1987-05-18 | 1988-11-22 | Ebara Corp | 不釣り合い振動及び同期妨害振動の防止制御方式 |
| JPH01116318A (ja) * | 1987-10-28 | 1989-05-09 | Natl Aerospace Lab | 能動形磁気軸受 |
| DE68925510T2 (de) * | 1988-10-21 | 1996-08-29 | Ebara Corp | Magnetlagersystem |
| JPH0720359B2 (ja) * | 1990-03-16 | 1995-03-06 | 株式会社荏原製作所 | 回転体のアンバランス修正装置 |
| JPH0419422A (ja) | 1990-05-11 | 1992-01-23 | Mitsui Eng & Shipbuild Co Ltd | 磁気軸受制御装置 |
| JP3087771B2 (ja) | 1991-04-19 | 2000-09-11 | 株式会社安川電機 | 電流制御装置 |
| JP2565438B2 (ja) | 1991-09-20 | 1996-12-18 | 株式会社日立製作所 | 電磁軸受制御装置 |
| JP3322932B2 (ja) | 1992-03-09 | 2002-09-09 | 株式会社日立製作所 | 磁気軸受制御装置 |
| US5486729A (en) * | 1992-03-09 | 1996-01-23 | Hitachi, Ltd. | Method and apparatus for controlling a magnetic bearing |
| DE4216481A1 (de) * | 1992-05-19 | 1993-12-02 | Forschungszentrum Juelich Gmbh | Magnetlagerregler |
| JP3135410B2 (ja) * | 1993-04-14 | 2001-02-13 | 光洋精工株式会社 | 磁気軸受装置 |
| JP3226686B2 (ja) | 1993-12-08 | 2001-11-05 | セイコーインスツルメンツ株式会社 | 磁気軸受及び該磁気軸受のバランス調整方法 |
| FR2716700B1 (fr) * | 1994-02-28 | 1996-05-15 | Mecanique Magnetique Sa | Palier magnétique actif à auto-détection de position. |
| US5736801A (en) * | 1995-08-18 | 1998-04-07 | Ebara Corporation | Filter circuit and control circuit for controlling a rotor |
| WO1997013986A1 (de) * | 1995-10-06 | 1997-04-17 | Sulzer Turbo Ag | Rotodynamische maschine zur förderung eines fluides |
| JP3591111B2 (ja) | 1996-02-29 | 2004-11-17 | 松下電器産業株式会社 | 磁気軸受制御装置 |
-
1999
- 1999-05-25 JP JP14470199A patent/JP4036567B2/ja not_active Expired - Lifetime
-
2000
- 2000-01-21 KR KR1020007010700A patent/KR100622098B1/ko not_active IP Right Cessation
- 2000-01-21 EP EP00900852A patent/EP1065395B1/en not_active Expired - Lifetime
- 2000-01-21 US US09/647,169 patent/US6515387B1/en not_active Expired - Fee Related
- 2000-01-21 DE DE60042253T patent/DE60042253D1/de not_active Expired - Fee Related
- 2000-01-21 WO PCT/JP2000/000272 patent/WO2000045059A1/ja active IP Right Grant
- 2000-01-25 TW TW089101141A patent/TW436586B/zh not_active IP Right Cessation
-
2002
- 2002-12-11 US US10/316,048 patent/US6809449B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| TW436586B (en) | 2001-05-28 |
| US20030080638A1 (en) | 2003-05-01 |
| DE60042253D1 (de) | 2009-07-09 |
| US6809449B2 (en) | 2004-10-26 |
| KR20010042206A (ko) | 2001-05-25 |
| WO2000045059A1 (fr) | 2000-08-03 |
| EP1065395A1 (en) | 2001-01-03 |
| JP2000283159A (ja) | 2000-10-13 |
| KR100622098B1 (ko) | 2006-09-07 |
| EP1065395A4 (en) | 2004-11-17 |
| EP1065395B1 (en) | 2009-05-27 |
| US6515387B1 (en) | 2003-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4036567B2 (ja) | 制御形磁気軸受装置 | |
| Zheng et al. | Optimization of damping compensation for a flexible rotor system with active magnetic bearing considering gyroscopic effect | |
| JPH10331851A (ja) | 故障許容機能を備えた磁気ベアリング制御システム構成 | |
| EP0281632A1 (en) | Electromagnetic bearing controller | |
| Hutterer et al. | Redundant unbalance compensation of an active magnetic bearing system | |
| Saeed et al. | Sensitivity analysis and vibration control of asymmetric nonlinear rotating shaft system utilizing 4-pole AMBs as an actuator | |
| JP2012251486A (ja) | 磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法 | |
| Okada et al. | Cross-feedback stabilization of the digitally controlled magnetic bearing | |
| Kuroki et al. | Miniaturization of a one-axis-controlled magnetic bearing | |
| Xiang et al. | Stable control of magnetically suspended motor with heavy self-weight and great moment of inertia | |
| Takahashi et al. | Thermal instability in a magnetically levitated doubly overhung rotor | |
| Hutterer et al. | Selfsensing unbalance rejection and reduction of the gyroscopic effect for an active magnetic bearing system | |
| Abulrub et al. | Adaptive control of active magnetic bearings to prevent rotor-bearing contact | |
| Xuan et al. | Magnetic bearing application by time delay control | |
| JPH06193633A (ja) | 磁気軸受制御方法及び装置 | |
| JP2565438B2 (ja) | 電磁軸受制御装置 | |
| Wei et al. | A simplified analysis method and suppression of the modalities of a magnetic levitation turbo rotor system | |
| Xu et al. | Unbalance Control for High-Speed Active Magnetic Bearing Systems Without Speed Sensors | |
| JPH03255240A (ja) | 能動軸受のロータ支持制御装置 | |
| Williams et al. | A comparison of analog and digital controls for rotor dynamic vibration reduction through active magnetic bearings | |
| Saito et al. | Trial of applying the unbalance vibration compensator to axial position of the rotor with AMB | |
| JPH05296243A (ja) | 磁気軸受制御装置 | |
| Shaltout et al. | Control of a smart electro-magnetic actuator journal integrated bearing to a common equilibrium position: A simulation study | |
| Kandil et al. | Configuration angle effect on the control process of an oscillatory rotor in 8-pole active magnetic bearings | |
| BAŞARAN et al. | Robust variable structure controllers for axial active magnetic bearing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070313 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070425 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071030 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101109 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111109 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121109 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121109 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131109 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |