JP3868035B2 - 測距装置 - Google Patents
測距装置 Download PDFInfo
- Publication number
- JP3868035B2 JP3868035B2 JP20219596A JP20219596A JP3868035B2 JP 3868035 B2 JP3868035 B2 JP 3868035B2 JP 20219596 A JP20219596 A JP 20219596A JP 20219596 A JP20219596 A JP 20219596A JP 3868035 B2 JP3868035 B2 JP 3868035B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- distance measuring
- subject
- distance
- optical path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Description
【発明の属する技術分野】
本発明は、オートフォーカス(自動測距:AFと略称す)などに用いられる測距装置の技術に関する。
【0002】
【従来の技術】
一般の測距技術としては「三角測距」が知られており、測距のための方式には、投光素子から測距用光を投射して行う「アクティブ方式」と、二つのレンズ位置から見た対象物の輝度分布の相関を利用する「パッシブ方式」の二方式が知られ、多くのカメラに採用されている。
【0003】
図11(A)に示す「アクティブ方式」で三角測距を説明すると、光源20からの測距用光はレンズ21で集光投光され被写体O1 に反射し、その反射信号光は受光レンズ21を介し光位置検出素子(PSD)23に入射すると光位置に依存した信号電流を出力する。この出力には信号光以外の光成分も含まれるので、これを定常光除去回路23aで除去し、取り出された信号成分から信号位置検出回路23bで反射信号光位置を求めるように構成されている。この反射信号光の入射位置xは、両レンズの主点間距離(基線長)Sと、受光レンズ2の焦点距離fが一定の時、「三角測距の原理」に従い、被写体距離Lが大きい程小さく、距離が近い程、大きな値となる。前述のように、信号位置検出回路23bによってこのxを検出すれば、被写体距離が算出され、xは大きく変化するほど測距精度は向上するので、Sまたはfが大きい程、高精度の測距が可能となる。
【0004】
一方、図11(B)に示す「パッシブ方式」は、投光素子と光位置検出素子を有さず、代わりに、被写体上の照明状態をパターンで検出する為の一対のセンサ4a,4bを受光レンズ1,2の後ろにそれぞれ配置することで、レンズの視差により両センサ上に生ずる光パターンのずれ具合が変化するので、前述同様の三角測距の原理に従って測距が可能である。このパッシブ方式の場合も、基線長や、焦点距離が大きい程、ずれ具合が明瞭になる故に、より高精度な測距が行える。
【0005】
【発明が解決しようとする課題】
しかしながら、上述のいずれの方式を採用したAFの場合でも、高精度化の為に基線長を大きくすると、カメラ本体の大型化につながる。さらに「パッシブ方式」ではセンサ4a,4bを一つのチップでセンサアレイとして形成する事が困難になる。一方、カメラの小型化をめざせば本体の奥行き制限が厳しく、測距装置のf値も制限を受けやすい。また、光路を光学的に何度も折り曲げ、小型のセンサアレイで測距する従来の光学系は複雑化するほど部品点数が増え、かつ光学系の取付け誤差や、温度特性がAFに悪影響を及ぼす等の理由で、環境変化に弱いカメラになっていた。
【0006】
また、これら二方式のAFは、それらに特有の苦手とする被写体があり、アクティブ方式では信号が届き難い遠距離の被写体に弱く、パッシブ方式では明瞭な像が得られない低コントラスト被写体や、暗いシーンでの測距が苦手である。さらに、これら二方式でも、測距しようとする部分に被写体が存在しない場合は正しいピント合わせができなかった。
【0007】
以上の問題の対策のため特公昭53−32699号公報には、ハーフミラー等を用いてAF光学系を折り曲げたついでに、透過光を観察してファインダに兼用して測距するようにした提案もある。しかし、この様にして三角測距用の一方の光だけを分割すると二つのセンサ上に生じる像が(例えば光量等が)アンバランスとなるので正確な測距は難しかった。また、特公平3−78603号公報には両方式を組み合わせたものもあった。
【0008】
本発明は、測距用光の反射強度によらず、近距離から遠距離まで同じ精度で測距可能な「パッシブ方式」のAFを基本とした改良により、部品点数をできるだけ削減し、ピント合わせにおいて失敗のない測距装置の提供を目的としたものである。
【0009】
【課題を解決するための手段】
そこで本発明は、「パッシブ方式」のAFの2つの受光レンズに入射する光を各々一回だけ折り曲げて光学系の取付け誤差や温度特性の誤差を最小限に押さえると共に、両センサ上の光量アンバランスにも対策し、その光学系を透過する光をも有効に利用して、苦手とする被写体の無い測距装置を提供する。
【0010】
また、いわゆる「アクティブAF」をも効果的に併用し、さらに正確なピント合わせが可能な測距装置を提供する。
具体的には、
[1] 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた同一基板上に設けられた複数の受光素子列と、を有し、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する測距装置であって、
前記複数のレンズと前記複数の受光素子列との間に、前記複数のレンズのそれぞれによって入射した光線を、共に同一の方向に分割する光路分割手段を配置し、この光路分割手段によって得られる複数の光路を、測距のために前記受光素子列に受光させる光路以外の用途の光路と兼用することを特徴とする測距装置を提供する。
【0011】
[2] この測距のために前記受光素子列に受光させる光路以外の用途の光路は少なくとも、ファインダ視野のためのファインダ光路か、測光のための測光センサの受光光路か、被写体へ発光するための発光手段の投光光路、または、遠隔制御装置からの遠隔制御光線の受光光路であることを特徴とする[1]に記載の測距装置を提供する。
【0012】
[3] 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた同一基板上に設けられた複数の受光素子列と、を備え、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する第1測距手段と、前記第1測距手段の複数のレンズと前記複数の受光素子列との間に配され、前記複数のレンズのそれぞれによって入射した光線を、共に同一方向に分割する光路分割手段と、前記光路分割手段によって得られる光路を介して、該被写体に向けて測距用の光束を投射する投射手段と、この投射による該被写体からの反射光を受光する受光手段と、を備え、受光した反射光の光路長に基づき該被写体までの距離を測距する第2測距手段と、所定の測距条件に応じて、前記第1測距手段または前記第2測距手段のいずれか一方を選択的に作動させる制御手段とを具備することを特徴とする測距装置を提供する。
[4] 被写体からの光を異なる位置に設けた第1と第2のレンズにて受光し、それぞれの透過光の光分布を検出する同一基板上に設けられた受光素子列を具備し、
前記第1、第2のレンズを介して前記受光素子列で検出したそれぞれの透過光の光分布の相対位置に基づいて、前記被写体までの距離を検出する測距装置において、
前記第1のレンズは前記第1のレンズと前記受光素子列との間の光路を分割し、前記第2のレンズは前記第2のレンズと前記受光素子列との間の光路を前記第1のレンズと同一方向に分割することを特徴とする測距装置を提供する。
[5] 前記第1、第2のレンズの一方を通過した光の一部が、カメラのファインダ光学系に入射し、他方のレンズを透過した光の一部が、カメラの露出制御用の測光センサに入射することを特徴とする[4]に記載の測距装置を提供する。
[6] 前記被写体に対して測距用の光束を投射する投光手段をさらに具備し、前記第1、第2のレンズの一方を通過した光の一部が、前記受光素子列とは別体に設けられた、前記測距用の光束による前記被写体からの反射光を受光するためのセンサに入射することを特徴とする[4]に記載の測距装置を提供する。
【0013】
【発明の実施の形態】
本発明について複数の実施形態を例示して詳しく説明する。
(第1実施形態)
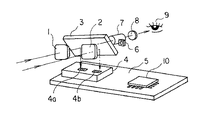
図1には本発明のカメラの第1実施形態に係わる測距装置の基本構造を示す。
【0014】
パッシブ方式の装置は、カメラに入射する被写体からの反射光を集光するレンズ1,2と、これらのレンズが集束した光をセンサアレイ4上に配された2つのセンサ4a,4bに導くためのハーフミラー3とを有している。このセンサアレイ4は、センサデータ読出し回路(不図示)を内蔵したICのクリアモールドパッケージである。このパッケージはこのICを実装する基板5上に登載されていると共に、これらのセンサ4a,4bの出力データから、2つのレンズ1,2の基線長や焦点距離に基づいて、「パッシブ方式の三角測距の原理」(参照:図11(B))に従って、被写体までの距離(被写体距離と略称する)を演算する演算手段(CPU)10が実装されている。
【0015】
この演算手段10はワンチップマイコン等によって構成され、一連の測距動作によって求められた被写体距離に対して撮影レンズ(不図示)を適宜に制御して「ピント合わせ」を行なう。二つのレンズ1,2からハーフミラー3を透過した光は、各々ファインダ用のプリズム光学系7と、カメラの露出制御用の測光素子6に導かれる。このファインダ用プリズム等のファインダ光学系7は、図1中では円柱状に表現されているが、形状にに限らず所定のミラー等を用いて光路が折り返され、カメラの厚み方向に長くならないように設定されている。
【0016】
(作用効果1)
基本的に、これらレンズ1,2は同一の光学特性を有し、ハーフミラー3は両レンズに対して同一なものを共用しているので、二つのセンサ4a,4b上の被写体像がアンバランスになることはなく、また、カメラの厚み方向を増加する事なくレンズ1,2の焦点距離を長くでき、高精度の測距装置が提供可能となる。
【0017】
また、撮影者9は、接眼レンズ8を介して被写体を観察できるので、撮影者の狙った対象に対して正しくピント合わせができ、測距装置と測光手段の間の視差も無くなるので正しい被写体に対し正確な露出制御が可能となる。
【0018】
(第2実施形態)
前述した第1実施形態の構成の一変形例として、図2に示すような構成も可能である。すなわち、本第2実施形態に係わるカメラの測距装置では、レンズ1,2を「プリズム状」のレンズで構成し、これに保持部材11を介してセンサ4a,4bへの結像機能と共に、ファインダ光学系7や測光センサ6へも光をそれぞれ導く作用を併せ持った構造にしている。
【0019】
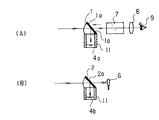
図3(A)はレンズ1側の光軸に沿った断面を示し、ハーフミラー面1aを有するプリズムレンズ1が、保持部材11の上に配置され、センサICのパッケージ4が、保持部材11の下に取り付けられている。ハーフミラー面は反射と透過の機能を有し、前方から入射してミラー面1aで鉛直下方に反射された光は上記センサICに導かれて、得られた信号は露光制御に利用される。
【0020】
一方、直進した透過光はハーフミラー後方のファインダ光学系7に導かれ、接眼レンズ8を介して撮影者の目9に被写体像を提供する。
図3(B)はレンズ2側の光軸に沿った断面を示し、ハーフミラー面2aで反射した光は測距用センサ4bに導かれ、透過光は測光センサ6に導かれる。レンズ2とICパッケージのアレイ4の間も保持部材11で固定されている。
【0021】
図示の測光センサ6の受光面を二分割し、図4のブロック図のようにこの一方を露出制御用センサ6a、他方を、カメラ本体を離れた所から操作するためのリモコン用の信号受光用センサ6bとして併設し、図示するような回路構成によってカメラシステムを構成する。
【0022】
すなわち、図4によれば、前述の測距用センサ4a,4bからなるセンサアレイ4はセンサデータ読出回路14a,14bにそれぞれ接続され、これらの回路は、被写体像の明暗に応じて出力する光電流を積分するコンデンサや、その積分電圧をA/D変換するA/D変換器等から構成されている。また、こうして得られたデータを基にして、二つのセンサ上の被写体像の「レンズ視差」に基づくずれ量が相関演算回路13によって計算される。これらは、図2に示すICパッケージ4の中の同一半導体チップ上に構成されている。
【0023】
一方、前述の露出用測光素子6aは被写体の輝度に応じた光電流を出力し、これに接続するAE回路12は、その光電流をA/D変換して続くCPU10にデジタルデータとして入力する。また、リモコン用受光素子6bの出力は、リモコン回路15に入力されるが、この回路15はリモコン送信機(不図示)の発する所定の周波数の信号のみを増幅して、この信号パターンをCPU10に入力してCPU10にリモコン信号が入射したことを認識させる。
【0024】
なお、撮影者は、リモコン操作以外にも、レリーズボタン(不図示)に連動するレリーズSW17の操作によっても撮影指示を行うことができる。
このような構成によって得られた測距結果や測光結果、及びリモコン信号受信の結果に基づいて、このCPU10は、撮影レンズのピント合わせ位置や露出制御を所定の演算処理によって決定し、カメラの各部に適切な撮影動作を行わせる。例えば、ピント合わせ時には、モータなどのレンズ駆動するアクチュエータや、メカ機構から成るピント合わせ手段18を制御し、その後、シャッタ手段19を制御して適切な露出制御を行う。この際、測光素子自体の特性のばらつきやセンサアレイ4a,4bの感度ばらつき、および、光学系の完成度および取付け誤差に基づくAF手段(ピント合わせ手段18を含む手段)の測距特性の誤差は、あらかじめカメラ製造時に検査を行ったうえでその誤差に対する補正データを電気的に書込み可能なメモリ(例えば、EEPROM)16に記憶させておくので、撮影時にCPU10はこのメモリ中の補正データを参照しながら最適な測距制御を行うこともできる。
【0025】
続いて、上述のような構成のカメラの各部を制御するCPU10の働きを、図5に示すフローチャートに従って説明する。
まず最初に、カメラのレリーズSWまたはリモコン送信機が操作されたか否かを検知する(S1,S2)。これらの何れかが操作されると、上述のEEPROM16のデータ読出しを行い(S3)、センサ6aに入射した光量に従って測光を行う(S4)。センサアレイ4a,4bの各センサの光電流を積分する動作を行なわせるが(S5)、それをデータ読出し手段を介して読み出し(S6)、相関演算手段13がこの結果に基づき像のずれ量を検出する(S7)。なお、このずれ量検出機能は、CPU10が所定のルーチンに有してもよい。
【0026】
上記ステップによって得られたずれ量に基づいて、CPU10はピント合わせ用の所定の距離算出演算を行い(S8)、ピント合わせ手段18を用いて撮影レンズの合焦点制御を行う(S9)。また、測光結果に基づき露出制御を行う(S10)。
【0027】
(作用効果2)
このように、本実施形態は、測距装置とファインダに「視差」が無いので、狙った被写体に対して正しくピントが合わせられると共に、光学系を共用しているので部品点数の削減ができ、よって、更に小型なカメラが提供できる。
【0028】
(第3実施形態)
図6は本発明の第3実施形態に係わるカメラの測距装置であり、図2に例示したと同様に一対のプリズムレンズ1,2を採用している。ただし、そのハーフミラー面で透過する光はファインダや測光素子に導かずに、図11(A)に示した「アクティブ方式」のAF用に利用する。本実施形態は、「パッシブAF」と共に「アクティブAF」を効果的に組み合わせてピント合わせの苦手な被写体パターンを減らしている。図11(A)でのアクティブ方式のAFは、被写体の明るさに関係なく、反射信号光位置を求める必要があることから、光位置検出素子に入射する定常的な光による光電流成分は除去する機能を有している。したがって、パッシブ方式の苦手とする高輝度かつコントラストが低い被写体パターンに対しても良好な測距が可能である。
【0029】
図6中のCPU10が制御するドライバ手段21により電流を供給された赤外発光ダイオード(IRED)20が発光すると、この測距用光はレンズ1の集光作用で被写体方向に投射される。そして、被写体からの反射信号光は、レンズ2によって光位置検出素子(PSD)22に導かれる。この素子に接続してその出力信号電流を演算するアクティブAFIC23は、入射信号光位置信号をCPU10に供給してくるので、CPU10はこの位置信号から前述の「三角測距の原理」で被写体までの距離算出ができる。一方、受光レンズ反射面で反射した光は、パッシブ方式の測距用センサに入射する。
【0030】
よって、本第3実施形態によればパッシブ方式とアクティブ方式の測距装置の双方の利点を活かした設計が可能となる。
このような構成において、CPU10は図7に示すようなフローチャートに基づく制御手順に従って、ピント合わせのための距離を決定する。
【0031】
ステップS20ではまず、IC4の「パッシブAF」を作動させ、各センサの上に生じた像相対位置差から、図11(A)に示した「三角測距の原理」に基づいて距離Lp を求める。これと同時に、像のコントラストを検出し、例えばその時各センサアレイに入射する最大光量と最低光量の差に基づくコントラスト値Cp を算出する(S20)。
【0032】
この値Cp が小さいと明瞭な像の比較ができず、その時の測距結果は信頼性が低いと考えられる。したがってこのコントラスト値Cp を所定の値Cp0(閾値)と比較し(S21)、もしCp がこの閾値より小さい場合はステップS23に分岐し、ドライバ21を作動させてIRED20を発光させ、PSD22に入射した反射信号光位置に従って、アクティブAF動作を行う(S23)。その得られた結果をLA とし、この距離に対してピント合わせを行い(S24)、撮影シーケンスを行う(S25)。
【0033】
一方、上記ステップS21においてコントラストが閾値より高いと判定された場合には、「パッシブAF」の測距結果Lp に従ってピント合わせ制御を行い(S22)、同様に撮影シーケンスを行う(S25)。
【0034】
(作用効果3)
このように本第3実施形態では、「コントラストの低いものは測距できない」という「パッシブAF」の弱点を克服した測距装置の提供が可能となる。また、この実施形態では、パッシブAFの受光レンズの一方を利用して「アクティブAF」の投光を行なったので、測距ポイントに「視差」などに基づく誤差を生じる事はなくなった。
【0035】
また、低コントラスト以外は「パッシブAF」なので、遠距離の被写体など反射信号光量の低下により測距誤差を生じる「アクティブAF」の欠点も克服している。また、前述の第2実施形態と同様、レンズ1,2は同一な光学特性を有するので、二つのセンサ4a,4bが配されたセンサアレイ4上の被写体像がアンバランスになることはなく、これらセンサ4a,4bを二つのパッシブ/アクティブ方式に共用しているので、カメラの部品数の削減ができる。また、カメラの厚み方向を増やす事なくレンズ1,2からセンサアレイ4までの距離を長くすることができ、よって、高精度の測距装置が提供可能となる。
【0036】
(第3’実施形態)
次に、前述した図6が示す構成であり、カメラが内蔵するいわゆる「露出補助用」として使われるストロボ装置を測距に有効利用した実施形態を説明する。発光源としてのキセノン管31は、CPU10が制御する発光手段33に接続している。この発光手段33に高電圧のトリガ電圧を印加すると、このキセノン管31は充電回路32が蓄えたエネルギーを瞬時に放電してストロボ発光する。
【0037】
図8のフローチャートには、このストロボの補助光の発光タイミングについて示されている。すなわち、測距処理において、まず、被写体の輝度BV を測定し所定の輝度Bv0(閾値)と比較する(S30)。比較の結果、所定の輝度BV0より小さい場合はステップS31に分岐し、測距の為にこのキセノン管31を発光させる(S31)。キセノン管の光は、反射傘30で広い範囲に投射され、暗いシーンの被写体にも陰影を加える故に、このようにして得られたコントラストによれば「パッシブ方式」の測距が容易となる。しかし、これでも明瞭なコントラスト値Cp が得られない場合もあり、このことを判定するためにCp と閾値Cp0とを比較する(S32)。やはり所定以上のコントラストが得られない場合は、ステップS35に分岐し、IRED20を発光させてPSD22でその反射信号を受光し、「アクティブ方式」の測距を行う(S35)。そしてこの得られた距離をLA としてそこにピントを合わせ(S36)、撮影シーケンスを行う(S38)。
【0038】
一方、上記ステップS30において、輝度Bv が所定値Bv0より明るい場合は、補助照明なしにセンサアレイ4の上の相対像位置差から「パッシブ方式」の測距を行う(S33)。この際、所定以上のコントラストがあれば、この得られた距離をLP としてそこにピントを合わせ(S37)、撮影シーケンスを行う(S38)。
【0039】
しかし、被写体に所定のコントラストがなければ正しい測距ができ難いので、ステップS35へ分岐して前述同様の測距を行う。
(作用効果3’)
このように、本実施形態によれば、被写体の明暗、コントラストの有無に関わらず、正しいピント合わせが可能となる。つまり、遠い被写体はアクティブAFを苦手とするが、遠くて明るい所にいる人物なら輪郭や影によってパッシブ方式による測距が可能である。例えば、被写体が風景の場合は、アクティブ測距時の反射光が著しく少ないので、その程度により適宜、無限遠にピント合わせをすればよい。このように本実施形態によれば、ほとんどの被写体にピント合わせが可能となる。
【0040】
(第3”実施形態)
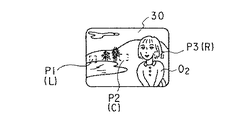
さらに、カメラのピント合わせが難しい被写体の例としては、例えば図12のようなシーンがある。特にアクティブAFでは、図12のようなシーンにおいて画面中心以外に存在(オフセンター)する被写体O2 に対して正しくピント合わせしようとすれば、その方向にも測距用光を投射する必要がある。一般にIRED等を動かして所望の投光方向切替えを行うと、位置の誤差等により正確な測距ができなくなるので、多数の発光素子を備えて順次光らせる技術もあるが、発光素子を増加させれることでドライバの数も増加し、その結果、コスト、スペース上の問題を生じてしまう。
【0041】
そこで図11(B)が示すようなパッシブ方式を採用するセンサでは、レンズ1の光軸上の被写体O1 ではなく、横にずれた位置の被写体O2 に対して測距を行なおうとする場合、光軸から離れた位置にまでセンサを配列(アレイ)するだけでよい。センサ数は多少増加するが、比較的容易にいわゆる「多点測距」が可能となる。つまり、レンズ1の光軸上のセンサ上の像ではなく、ずれた位置のセンサ上の被写体像と一致する被写体像位置をセンサ4b上で検出できれば、その相対位置ずれ量から三角測距の原理により被写体O2 の測距が可能となる。このような特性も加味し、なおかつパッシブAFの更なる弱点である暗い所や、高輝度下の低コントラスト被写体まで正しく測距できるように動作手順を改良したものが、図9に示すフローチャートである。
【0042】
また、この実施形態の装置としての基本構成は図6に示したと同様であり、センサアレイ4の感度を「赤外」領域まで持たせ、IRED20をパッシブ測距時の「補助光」としても利用できるように改良している。
【0043】
つまり、暗いシーンでは被写体の輝度分布に明瞭な変化が無いので、光をカメラ側から発光してやりパッシブな測距を可能とした。しかし、それでも明るいシーンの低コントラストの被写体では、補助光の光量が太陽光などに比べると小さいため、正しい測距はできない。そこで、太陽光などの定常的に被写体を照明している定常光成分を除去し、カメラ側から投射した測距用光(IRED20の光)の反射信号光のみを抽出するアクティブAFの技術を併用して、図12のようなシーン(即ち、被写体人物がオフセンターの場合)にも対応している。
【0044】
なお、この信号光抽出技術としては、例えば、定常光電流をサンプルホールドした状態で測距用光を投射し、その時の変化成分を測距信号として利用する方式や、変調した測距信号を投射しバンドパスフィルタなどで特定周波数の信号のみを増幅する方式を採用する。
【0045】
この図9のフローチャートによれば、まず、パッシブ方式のAFが補助光なしに測距が行なえる明るさか否かを判定し(S40)、もし、充分明るい場合は図11(B)で説明したパッシブ方式の三角測量の方法で、次からのステップで画面内左右および中央に対応する3つの測距ポイント(図12中のp1,p2,p3 )での測距と、各測距ポイントのコントラスト値を検出する(S41〜S43)。
【0046】
もし、このコントラスト値が小さい場合は、そのポイントpn(n=1,2,3,) の測距結果は信頼性が低いので、次からのステップでは、このようなポイントを除去して主要被写体距離Lp を求める。この実施形態では、「主要被写体は最至近にいるはずである」と仮定して、得られた測距結果より最至近選択によりLp を求めている(S44,S45)。
【0047】
また、いずれの測距ポイントもコントラストが低い場合は、IRED20を発光させ(S46)、PSD22で反射信号光を受光して、「アクティブ方式」の測距を行う。この方式では、前述のように定常光は除去し信号光のみを抽出して測距ができるので、この様な高輝度低コントラストの被写体に対しても正しい測距が可能である。よって、この様なシーンでは、このアクティブAFの結果を優先し、その結果得られた距離LA にピント合わせを行う(S47)。
【0048】
一方、上記ステップS40における判定の結果、暗いシーンではステップS50に分岐して、IRED20を投射してこれを補助光とした上で「パッシブAF」を行う(S50)。この場合、IRED20はあまり広い範囲の照射はできないので、照射領域のみの測距範囲とする。この際、同時にコントラストをチェックし(S51)、この結果が低いコントラストならステップS46にて「アクティブAF」を行う。またコントラストが充分ならば、このとき得られた距離にピント合わせを行い(S52)、撮影シーケンスに入る(S53)。
【0049】
(作用効果3”)
よって、この実施形態によっても前述の(作用効果3’)とほぼ同等な効果が得られる。
【0050】
(第4実施形態)
本発明の第4実施形態に係わるカメラの測距装置は、一度に全センサアレイの出力を記憶したり、CPUに取り込むことが可能な方式のシステムならば図10に示すようなフローチャートの処理手順が可能である。
【0051】
基本構成は、前述の図6に示した構成と実質的に同一なものを想定し、普段は露出補助用として使われるカメラ内蔵のストロボ装置が、図7と同様に、AF用補助光源として有効活用されている。しかし、本来はアクティブAF用であるIRED20もパッシブAF用として利用される。これらの使い分けを説明すると、大光量で広範囲を照射できるストロボ光は、画面内を均一に照らすので本来コントラストが有るにも係わらず、低輝度な故に測距できない被写体に有効である。ストロボの広い照射角と、センサアレイの多点測距できる範囲から、被写体は画面内センターにいる必要はない。
【0052】
しかし、一般に、ストロボ光は充電されたエネルギーの放電によって発光が行われるので一瞬しか光らず、かつ均一なのでコントラストの無い被写体に対してはコントラストを与えることができない。その点、アクティブAF用のIREDの光は、集光性もよく狭い範囲ながら長時間の発光が可能である。したがって、低輝度時には、例えば被写体が遠距離にあっても、長時間発光させれば積分効果によって、コントラストの無い被写体に明瞭なコントラストを与えることができる。近距離の被写体ならば更に有効である。また、この様なコントラストを作るのに有効なIREDによる補助光も、明るいシーンでは、環境の光にかき消されて効果が期待できないので、この場合にはアクティブAFの定常光除去効果が有効である。
【0053】
よって、上述のような理由を基にして改良した処理手順を、図10のフローチャートに例示する。
まず、被写体輝度の判定を行ない(S60)、各センサ4a,4bアレイの出力をCPU10に入力しCPU10がそれを像出力として記憶するが、「低輝度」と判定されていた場合は、像検出時にストロボ補助光を照射して被写体がもつコントラストを強調する(S70)。続いて、この低輝度状態である事を記憶するためにCPU10は低輝度フラグをH(=1)に設定する(S71)。
【0054】
一方、被写体輝度が「高輝度」と判定された場合には、補助光照射は無駄であり、補助光無しで像信号検出を行なう(S61)。続いて低輝度フラグをL(=0)に設定する(S62)。
【0055】
このようにして、二つのレンズを通して得られた、被写体の像信号のズレから図11(B)で示した「三角測距の原理」で被写体距離の検出を行なうが、基準となるセンサ位置を次からのステップ(S63〜S65)にて切り換えて、測距の方向を切換える。これにより、L(左)、C(中央)、R(右)の画面内3ポイントの測距が可能となる。しかし、コントラストの低い像信号は測距用として不適切なのでこれは除去し(S66)、信頼性のあるものから最至近の測距結果を求め(S83)、この結果にピント合わせを行ない露出を行なう(S84)。
【0056】
全てのセンサが低コントラストを示すか否かの判定を行い(S67)、その場合は何等かの対策が必要となり、例えばこの場合、先に求めた低輝度フラグの判定結果に基づいて(S80)、もし低輝度ならは、ストロボ光より集光性が優れ被写体上にコントラストを形成できるIRED20を照射して補助光源とする(S81)。この照射のとき、IRED20の光は画面中央部用のセンサにしか入射しないので、画面中央部の像信号をCPU10は優先して取り込み、その結果えられた値に基づき所定の測距演算を行なう。
【0057】
このIRED20の補助光も高輝度時には周囲の光にかき消されてしまうので、低輝度フラグがL(=0)の場合は定常光を除去して測距可能なアクティブ方式の測距を、IRED20の発光およびPSD22での受光によって行なう。なお、この際の測距原理も、図11(A)にて説明した方法と同様に行う。
【0058】
(作用効果4)
このように、本第4実施形態では、暗いシーンで画面中央部に被写体が存在しないシーンでも、広い範囲を照射するストロボ光により正しくピント合わせが可能となる。また、明瞭なコントラストが無い被写体でもIREDを用いるので測距が可能であり、従来から、パッシブAFが苦手としていた高輝度の低コントラスト被写体も「アクティブAF」で測距が可能となるので、あらゆるシーンで正しいピント合わせが可能となる。
【0059】
以上、本発明を複数の例に基づき説明したが、本明細書中には以下の発明が含まれる。
[1] 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた複数の受光素子列と、を有し、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する測距装置であって、
前記複数のレンズと前記複数の受光素子列との間に、前記複数のレンズの入射光線を分割する光路分割手段を配置し、この光路分割手段によって得られる複数の光路を測距以外の用途の光路と兼用することを特徴とするカメラの測距装置。
【0060】
[2] 前記測距以外の用途の光路は少なくとも、
ファインダ視野のためのファインダ光路か、測光のための測光センサの受光光路か、被写体へ発光するための発光手段の投光光路または、遠隔制御装置からの遠隔制御光線の受光光路であることを特徴とする[1]に記載のカメラの測距装置。
【0061】
[3] 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた複数の受光素子列と、を備え、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する第1測距手段と、
前記第1測距手段の複数のレンズと前記複数の受光素子列との間に配され、入射した光線を分割する光路分割手段と、
前記光路分割手段によって得られる光路を介して、該被写体に向けて測距用の光束を投射する投射手段と、この投射による該被写体からの反射光を受光する受光手段とを備え、受光した反射光の光路長に基づき該被写体までの距離を測距する第2測距手段と、
所定の測距条件に応じて、前記第1測距手段または前記第2測距手段のいずれか一方を選択的に作動させる制御手段と、
を具備することを特徴とするカメラの測距装置。
【0062】
そのほかに次のような発明も含まれる。
(1) 被写体からの光を異なる位置に設けた第1と第2のレンズにて受光し、それぞれの透過光の光分布を検出する受光素子列と、
上記第1、第2のレンズによる透過光の光分布の相対位置に基づいて、上記被写体までの距離を検出するカメラの測距装置において、
上記第1、第2のレンズと上記受光素子列との間に、光路を分割する分割光学系を設けたことを特徴とするカメラの測距装置。
【0063】
(2) 上記第1、第2のレンズの一方を通過した光の一部が、カメラのファインダ光学系に入射し、他方のレンズを通過した光の一部が、カメラの露出制御用の測光用センサに入射することを特徴とする(1)に記載のカメラの測距装置。
【0064】
(3) 上記被写体に対して測距用の光束を投射する投光手段をさらに具備し、上記第1、第2のレンズの一方を通過した光の一部が、上記受光素子列とは別体に設けられた、上記測距用光束による上記被写体からの反射光を受光するためのセンサに入射することを特徴とする(1)に記載のカメラの測距装置。
【0065】
(4) 被写体に対して測距用の光束を投射する投光手段と、
この被写体からの反射光を受光し、その反射光の入射位置を検出する光位置検出手段と、
上記被写体の像を視差を有する複数の光路を介して検出し、それぞれの被写体像の相対位置差を検出する複数のセンサアレイと、
上記光位置検出手段の出力、または上記複数のセンサアレイ上の被写体像の相対位置差に基づいて、上記被写体までの距離を演算する演算制御手段と、
を具備し、
上記センサアレイによる受光時にも上記投光手段を作動させることを特徴とするカメラも測距装置。
【0066】
(5) 被写体の輝度が高く、コントラストが低いときには、上記光位置検出素子の出力を優先して用いることを特徴とする(4)に記載のカメラの測距装置。
【0067】
(6) ストロボ装置を内蔵するカメラにおいて、
被写体に対し測距用の光束を投射するための発光素子と、撮影画面内の複数の点を測距する第1の測距用受光素子と、画面内の一点を測距する第2の受光素子と、を具備し、
上記第1の受光素子を用いるときは上記ストロボ装置を発光させ、
上記第2の受光素子を用いるときは上記発光素子を作動させるように制御することを特徴とするカメラの測距装置。
【0068】
【発明の効果】
以上説明したように、2つのレンズは同一の光学特性を有し、ハーフミラーは両レンズに対して同じものを利用するので、2つのセンサ上の被写体像がアンバランスになることはなく、また測距装置の厚み方向を増やすことなくレンズの焦点距離を長くできAFの性能を向上できる。
【0069】
よって、本発明によれば、「パッシブ方式」のAFの2つの受光レンズに入射する光を各々一回だけ折り曲げて光学系の取付け誤差や温度特性の誤差を最小限に押さえると共に、両センサ上の光量アンバランスにも対策し、その光学系を透過する光をも有効に利用して、苦手な被写体の無い測距装置を提供できる。
【0070】
また、「アクティブAF」と「パッシブAF」との効果的な組合わせにより、ピント合わせも更に正確な測距装置を提供できる。
よって、以上の本発明によれば、測距用光の反射強度によらず、近距離から遠距離まで同じ精度で測距可能な「パッシブ方式」のAFを基本とした及びその改良により、部品点数を削減し、ピント合わせの失敗の無い測距装置を提供することが可能となる。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係わるカメラの測距装置を示す斜視図。
【図2】本発明の第2実施形態に係わるカメラの測距装置を示す斜視図。
【図3】
(A)は、第2実施形態の測距装置の一つの光軸に沿った断面図、
(B)は、第2実施形態の測距装置の他の光軸に沿った断面図。
【図4】本発明のカメラの測距装置に関わる主要部のブロック構成図。
【図5】本発明の第2実施形態に係わるカメラの測距のシーケンスの手順を示すフローチャート。
【図6】本発明の第3実施形態に係わるカメラの測距装置を示す斜視図。
【図7】第3実施形態の測距の基本的処理手順を示すフローチャート。
【図8】第3’実施形態の測距の詳細な処理手順を示すフローチャート。
【図9】第3”実施形態の測距の詳細な処理手順を示すフローチャート。
【図10】第4実施形態の測距の詳細な処理手順を示すフローチャート。
【図11】(A)は、アクティブ方式の三角測距の原理を示す説明図、
(B)は、パッシブ方式の三角測距の原理を示す説明図。
【図12】ある撮影シーンの複数の測光ポイントの位置を示す説明図。
【符号の説明】
1,2…レンズ(プリズムレンズ)、
3…ハーフミラー、
4…センサアレイ(ICパッケージ)、
5…基板、6…測光素子(測光センサ)、
7…ファインダ光学系、
8…接眼レンズ、
10…CPU(演算手段)、
11…保持部材、
12…AE回路、
13…相関演算回路、
14a,14b…データ読出し回路、
15…リモコン回路、
16…EEPROM、
17…レリーズSW、
18…ピント合わせ手段、
19…シャッタ手段、
20…赤外発光ダイオード(IRED)、
21…ドライバ手段、
22…光位置検出素子(PSD)、
23…アクティブAFIC、
30…反射傘、
31…キセノン管、
32…充電回路、
33…発光手段。
O1 ,O2 …被写体、
p1 ,p2 ,p3 …測光ポイント。
S1〜S10…第2実施形態の測距シーケンス、
S20〜S25…第3実施形態の測距シーケンス、
S30〜S38…第3’実施形態の測距シーケンス、
S40〜S53…第3”実施形態の測距シーケンス、
S60〜S84…第4実施形態の測距シーケンス。
Claims (6)
- 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた同一基板上に設けられた複数の受光素子列と、を有し、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する測距装置であって、
前記複数のレンズと前記複数の受光素子列との間に、前記複数のレンズのそれぞれによって入射した光線を、共に同一の方向に分割する光路分割手段を配置し、この光路分割手段によって得られる複数の光路を、測距のために前記受光素子列に受光させる光路以外の用途の光路と兼用することを特徴とする測距装置。 - 前記測距のために前記受光素子列に受光させる光路以外の用途の光路は少なくとも、
ファインダ視野のためのファインダ光路か、
測光のための測光センサの受光光路か、
被写体へ発光するための発光手段の投光光路、または、
遠隔制御装置からの遠隔制御光線の受光光路であることを特徴とする請求項1に記載の測距装置。 - 視差を有する複数のレンズと、これら複数のレンズのそれぞれの焦点位置に置かれた同一基板上に設けられた複数の受光素子列と、を備え、それぞれの受光素子列に入射する光量分布に基づいて被写体までの距離を測距する第1測距手段と、
前記第1測距手段の複数のレンズと前記複数の受光素子列との間に配され、前記複数のレンズのそれぞれによって入射した光線を、共に同一方向に分割する光路分割手段と、
前記光路分割手段によって得られる光路を介して、該被写体に向けて測距用の光束を投射する投射手段と、この投射による該被写体からの反射光を受光する受光手段と、を備え、受光した反射光の光路長に基づき該被写体までの距離を測距する第2測距手段と、
所定の測距条件に応じて、前記第1測距手段または前記第2測距手段のいずれか一方を選択的に作動させる制御手段と、
を具備することを特徴とする測距装置。 - 被写体からの光を異なる位置に設けた第1と第2のレンズにて受光し、それぞれの透過光の光分布を検出する同一基板上に設けられた受光素子列を具備し、
前記第1、第2のレンズを介して前記受光素子列で検出したそれぞれの透過光の光分布の相対位置に基づいて、前記被写体までの距離を検出する測距装置において、
前記第1のレンズは前記第1のレンズと前記受光素子列との間の光路を分割し、前記第2のレンズは前記第2のレンズと前記受光素子列との間の光路を前記第1のレンズと同一方向に分割することを特徴とする測距装置。 - 前記第1、第2のレンズの一方を通過した光の一部が、カメラのファインダ光学系に入射し、他方のレンズを透過した光の一部が、カメラの露出制御用の測光センサに入射することを特徴とする請求項4に記載の測距装置。
- 前記被写体に対して測距用の光束を投射する投光手段をさらに具備し、前記第1、第2のレンズの一方を通過した光の一部が、前記受光素子列とは別体に設けられた、前記測距用の光束による前記被写体からの反射光を受光するためのセンサに入射することを特徴とする請求項4に記載の測距装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20219596A JP3868035B2 (ja) | 1996-07-31 | 1996-07-31 | 測距装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20219596A JP3868035B2 (ja) | 1996-07-31 | 1996-07-31 | 測距装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1048509A JPH1048509A (ja) | 1998-02-20 |
| JP3868035B2 true JP3868035B2 (ja) | 2007-01-17 |
Family
ID=16453550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP20219596A Expired - Fee Related JP3868035B2 (ja) | 1996-07-31 | 1996-07-31 | 測距装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3868035B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6995288B2 (ja) * | 2018-03-15 | 2022-01-14 | オムロン株式会社 | 光電センサ |
-
1996
- 1996-07-31 JP JP20219596A patent/JP3868035B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1048509A (ja) | 1998-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6480266B2 (en) | Autofocus distance-measuring optical system | |
| US7405762B2 (en) | Camera having AF function | |
| US5915233A (en) | Distance measuring apparatus | |
| JPH07504519A (ja) | 自動焦点および間接照明を備えたカメラシステム | |
| JP2000347095A (ja) | 測距装置 | |
| JP2000171687A (ja) | 測距装置 | |
| JP2002221655A (ja) | 測距装置 | |
| US6826362B2 (en) | Camera having distance measuring apparatus | |
| US6350976B1 (en) | Distance measuring apparatus | |
| JP3868035B2 (ja) | 測距装置 | |
| JPH0943682A (ja) | ファインダ装置 | |
| JP2000171685A (ja) | 焦点検出装置 | |
| US6501540B2 (en) | Surveying instrument having an optical distance meter | |
| JPH09318871A (ja) | 補助投光装置および焦点検出装置 | |
| US6487371B1 (en) | Range finder device having mode for removing steady light components and mode for not removing steady light components | |
| JPH1096851A (ja) | カメラの測距装置 | |
| US6556785B2 (en) | Range finder | |
| JP3429590B2 (ja) | カメラの測距装置 | |
| US20020008189A1 (en) | Surveying instrument having a phase-difference detection type focus detecting device | |
| JPS63259521A (ja) | 複合型合焦検出装置 | |
| JP3297497B2 (ja) | 測距装置 | |
| JP3174128B2 (ja) | カメラ | |
| JP3326407B2 (ja) | 測距装置 | |
| JP2001013404A (ja) | 半導体受光素子、距離測定装置、およびカメラ | |
| JP2001141985A (ja) | 電子カメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050802 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Effective date: 20061010 Free format text: JAPANESE INTERMEDIATE CODE: A61 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101020 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 4 Free format text: PAYMENT UNTIL: 20101020 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111020 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111020 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 6 Free format text: PAYMENT UNTIL: 20121020 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131020 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |