JP3796718B2 - 車両用電力変換器の制御装置 - Google Patents
車両用電力変換器の制御装置 Download PDFInfo
- Publication number
- JP3796718B2 JP3796718B2 JP2003358786A JP2003358786A JP3796718B2 JP 3796718 B2 JP3796718 B2 JP 3796718B2 JP 2003358786 A JP2003358786 A JP 2003358786A JP 2003358786 A JP2003358786 A JP 2003358786A JP 3796718 B2 JP3796718 B2 JP 3796718B2
- Authority
- JP
- Japan
- Prior art keywords
- control means
- converter
- vehicle
- idling
- converter control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- Y02T10/7077—
-
- Y02T10/7241—
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Description
ところで、1編成の車両には変換器制御に必要な電流、電圧信号の他に、マスコンからのノッチ指令、応荷重指令、ブレーキ力指令及び主回路の断流器信号等の車両の運転状態を決定するために必要な信号(以下、運転情報と呼ぶ。)が多数あり、制御装置にはこれらの運転情報が各々電線を介して入力されている。このため、車両1編成で複数台の制御装置を用いる場合、全ての制御装置は独立しているので、それぞれ独立した制御装置に上記運転情報を並列に入力する必要があった。
また、従来技術として、特開平4−248301号公報には、可変電圧可変周波数インバータと誘導電動機を1対1に組み合わせてユニット化(以下、駆動制御ユニットと呼ぶ。)し、この複数の駆動制御ユニットを1台の統括制御装置で制御するシステムがある(例えば、特許文献1参照)。
このシステムにおいて空転及び滑走が発生した場合、統括制御装置は、予め定められた特定の駆動制御ユニットのトルク指令値を低下させ、他の駆動制御ユニットに対してトルク指令値を低下させた駆動制御ユニットの速度信号を使用するように指令する。これにより、トルク指令値を低下させた駆動制御ユニットの空転及び滑走を抑制し、このユニットの速度信号を使用することにより、実走行速度を確実に得ることが可能となり、再粘着性能の向上が期待できるとしている。
また、上記公報記載の従来技術は、特別な検出手段を用いずに実走行速度を検出し、これによりインバータ周波数の発散を抑制することを目的としているため、インバータ周波数の発散を抑制できるものの、空転及び滑走自体を防止するものではない。このため、空転及び滑走が発生したユニットについては、従来と同様にトルク指令の減少及び復元といった再粘着制御が必要である。
ここで、一般的な再粘着制御を図20に示す。すなわち、空転及び滑走が発生し、図示のように電動機速度Frが急変した場合、電動機速度Frが急変している期間(t0〜t1:空滑信号が“1”の期間)では電流パターンIpを絞り、再粘着した時点(t1)から所定時間保持(t1〜t2)した後に元の値までゆっくりと戻す(t2〜t3)。したがって、1回の空転及び滑走で斜線部に示すトルクの減少が発生する。この一連の再粘着制御には数秒の時間を要するため、空転及び滑走が頻繁に発生する場合、車両の加速性能は著しく低下するといった問題がある。また、この再粘着制御によりトルク変動が発生するため、乗り心地が悪くなるといった問題もある。
本発明の課題は、車両用電力変換器の制御装置の小形、低コスト化を図ると共に、再粘着制御によるトルクの減少を防止し、所定の加速性能を得て制御性能を向上させることにある。
得て車両の運転状態を決定する車両制御手段と、決定した運転状態に応じて電力
変換器を制御する変換器制御手段を備え、1台の車両制御手段に対して複数台の
変換器制御手段を接続すると共に、複数台の変換器制御手段によって複数台の電
動機を駆動する車両用電力変換器の制御装置において、複数台の変換器制御手段
によって駆動される複数台の電動機の一台に空転又は滑走が発生した場合、車両
制御手段は、空転又は滑走が発生した変換器制御手段より進行方向に沿って前方
の変換器制御手段に対して、電動機のトルク指令値を増加させる信号を送信する。
ここで、車両制御手段は、空転又は滑走が発生した変換器制御手段から空転又
は滑走データを受信し、空転又は滑走が発生した変換器制御手段より進行方向に
沿って前方の変換器制御手段に対して、電流指令値を増加させる指令信号を送信
し、電動機のトルクを増加させる。
また、複数台の誘導電動機のうち1台が空転及び滑走した場合、1台の車両制御手段によって他の誘導電動機のトルクを同時に低減できるため、粘着制御性能を向上させることができる。
また、空転及び滑走の発生頻度を低減できると共に、空転及び滑走が発生した場合でも車両全体としてのトルクの減少を最小限にすることができるため、所定の加速性能を得ることができる。また、これにより、空転及び滑走の発生しやすい線路条件下における乗り心地の低下を防止することができる。
本実施形態において、車両制御手段1は、マイコン11、アナログインタフェース12、デジタル入力インタフェース13、デジタル出力インタフェース14、プログラムメモリ15、作業メモリ16、ネットワークインタフェース17からなり、アナログ入力インタフェース12にブレーキ受量器3から出力される応荷重指令31とブレーキ力指令32を入力し、デジタル入力インタフェース13にマスコン4から出力されるノッチ指令41及び断流器5の接点信号51を入力する。一方、デジタル出力インタフェース14から出力される駆動信号52は断流器5に入力する。
マイコン11は、アナログインタフェース12及びデジタル入力インタフェース13からアナログ信号及びデジタル信号を取り込み、プログラムメモリ15に格納された処理手順に従って作業メモリ16を用いて後述する処理を行い、車両の運転状態を決定する。ここで決定した運転状態をネットワークインタフェース17を介してシリアル伝送路10に出力する。
次に、2台の変換器制御手段2a,2bは、マイコン21a,21b、アナログインタフェース25a,25b、ネットワークインタフェース27a,27b、プログラムメモリ22a,22b、作業メモリ23a,23b、パルスインタフェース24a,24b、ロジック回路26a,26b、インバータ装置6a,6b、誘導電動機7a,7b、パルス発生器8a,8bからなり、マイコン21a,21bはネットワークインタフェース27a,27bを介してシリアル伝送路10から運転状態に関する指令を取り込み、プログラムメモリ22a,22bに格納された処理手順に従ってそれぞれ作業メモリ23a,23bを用いて後述する処理を行う。
マイコン21a,21bは、最終的にロジック回路26a,26bを介してPWMパルス信号261a,261bを出力し、インバータ装置6a,6bを駆動する。これにより、3相誘導電動機7a,7bの速度が制御される。
3相誘導電動機7a,7bの速度は、パルス発生器8a,8bで速度に比例したパルス列81a,81bに変換し、パルスインターフェース24a,24bを介してマイコン21a,21bに入力する。また、電流検出器9ua,9va,9wa及び9ub,9vb,9wbで検出した電動機電流91a,92a,93a及び91b,92b,93bとインバータ装置6a,6bの直流電源電圧61a,61bはアナログ入力インタフェース25a,25bを介してマイコン21a、21bに入力する。
図2は、車両制御手段1の機能ブロック図を示す。図示のように、応加重指令31、ブレーキ力指令32を切り替え手段1aに入力し、ノッチ信号41a〜41eをノッチ判定手段1bに入力する。ノッチ判定手段1bは、ノッチ信号41a〜41eに基づいて力行又はブレーキ状態を”1”又は”0”で示すPB信号411を出力し、これに従って、切り替え手段1aは応加重指令31又はブレーキ力指令32の何れか一方をトルク指令値312として出力する。減算手段1jは、トルク指令値312から異常処理手段1eが出力するトルク補正値314を減算した最終的なトルク指令値313を算出し、出力メモリ1fに格納する。また、ノッチ判定手段1bは、ノッチ信号41a〜41eを図3(a)に示す2バイトのノッチ情報412に変換して出力する。一方、断流器5の接点信号51は、断流器制御手段1cに入力され、これに基づいて断流器制御手段1cは、断流器5のオン、オフ状態を”1”又は”0”で示すLB信号511を出力する。
シーケンス処理手段1dは、ノッチ情報412とLB信号511に基づいてインバータ装置2a,2bのスタートタイミングを判定する。この結果、図3(b)に示すように、ノッチ情報412の最上位ビットにスタートフラグ(”1”でインバータスタート)を付加したノッチ情報512を出力し、出力メモリ1fに格納する。
一方、ネットワーク制御手段1hは、シーケンス処理手段1dからの送信要求により出力メモリ1fに格納されているデータを、ネットワーク10上に出力すると共に、ネットワーク10を介して変換器制御手段2a,2bから送信されたデータを取り込み、入力メモリ1gに格納する。なお、変換器制御手段2a,2bからの送信データには後述する異常データと、速度、電圧値、電流値等の一定周期で出力される定期データがあるが、定期データについてはここでは詳細な説明を省略する。
例えば、誘導電動機7aが空転(又は、滑走)した場合、車両制御手段1が変換器制御手段2bに対してトルク指令値を低減する指令を送信し、変換器制御手段2bが同時にトルクを減少させる。このため粘着制御性能が向上する。
まず、ノッチ信号41a〜41eを取り込み(手順100)、力行であると判定した場合(手順101)は、応荷重指令31をトルク指令値312として出力メモリ1fに格納する(手順102)。一方、手順101において力行でないと判定され、ブレーキであると判定した場合(手順103)は、ブレーキ力指令32をトルク指令値312として出力メモリ1fに格納する(手順104)。なお、手順101、手順103において力行、ブレーキの何れでもないと判定した場合は惰行或いは停止状態のため、以下の処理をバイパスし、定期データを受信して(手順111)終了する。
次に、異常情報の有無をチェックし(手順105)、異常がある場合は異常処理を実行する(手順106)。
パルス異常の有無(手順1061)、過電流の有無(手順1062)及び過電圧の有無(手順1063)をチェックし、何れか一つでも異常の有る場合は該当する変換器制御手段を停止するためのリセット信号522を出力する(手順1064)。手順1061〜1063において異常がない場合は、空転或いは滑走であるかを判定し(手順1065)、空転或いは滑走の場合はトルク補正値314を出力する(手順1066)。手順1065において空転或いは滑走でない場合は手順1066をバイパスして異常処理を終了する。
以上の一連の処理を所定の周期で繰り返す。
なお、指令データ200は、図9に示すように、出力メモリ1fの内容の1ブロック分の構成であり、送信元(車両制御手段1)アドレス201、受信先(変換器制御手段2a、2b)アドレス202、トルク指令値203及びノッチ情報204からなる。
図10は、変換器制御手段2aの機能ブロック図を示す。図示のように、ネットワーク制御手段2a−1は、ネットワーク10を介して変換器制御手段2aに対する指令データ200(図9)を取り込み、入力メモリ2a−2に格納する。この内容は、図11に示すように、+0番地が送信元アドレス(本実施形態では車両制御手段1:$0000)、+2番地が受信先アドレス(変換器制御手段2a:$0001)、+4番地がトルク指令値、+6番地がノッチ情報である。
運転状態判定手段2a−3は、入力メモリ2a−2のノッチ情報221を参照して起動信号231(”1”で起動、”0”で停止)と、力行/ブレーキ、前進/後進等の運転状態指令232を出力する。電流パターン演算手段2a−4は、運転状態指令232と入力メモリ2a−2のトルク指令値222及びアナログ/デジタル変換器(以下、A/D変換器と略称する。)2a−5でデジタル値に変換した直流電源電圧251を用いて力行又はブレーキ時の電流パターン241を出力する。
滑り周波数演算手段2a−9は、電流パターン241とA/D変換器2a−6〜2a−8でデジタル値に変換したU相電動機電流261、V相電動機電流271、W相電動機電流281を用いて電流パターン241に応じた電動機電流を得るための滑り周波数291を出力する。
速度演算手段2a−10は、図1に示すパルス発生器8aから出力されるパルス列81aを(1)式に代入して電動機速度2101を算出する。
Fr=Np/30 (1)
ここで、Np:電動機の回転数に対応するパルス数
(30パルス/1回転の場合)
Fr:電動機速度(Hz)
周波数演算手段2a−11は、滑り周波数291と電動機速度2101を(2)式に代入して周波数指令値2111を算出する。
Fi=Fs+Fr (2)
ここで、Fi:周波数指令値(Hz)
Fs:滑り周波数(Hz)
変調率演算手段2a−12は、電流パターン241と周波数指令値2111より電圧指令値2121を出力する。
PWM演算手段2a−13は、前記周波数指令値2111と電圧指令値2121に応じて、図1に示すインバータ装置6aを駆動するためのPWMパルス信号261aを出力する。
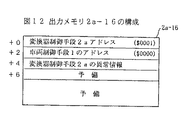
異常検知手段2a−15は、デジタル値に変換した直流電源電圧251に対する過電圧の検知、3相の電動機電流261、271、281に対する過電流の検知、電動機速度2101による空転又は滑走の検知及びPWMパルス信号の異常を検知し、異常フラグ2151を出力(”0”で正常,”1”で異常)すると共に、出力メモリ2a−16に異常情報(図6)を格納する。出力メモリ2a−16の内容は、図12に示すように、+0番地が変換器制御手段2aのアドレス($0001)、+2番地が車両制御手段1のアドレス($0000)、+4番地が異常情報、+6番地が予備である。
起動制御手段2a−17は、運転状態判定手段2a−3から出力される起動信号231が”1”であり、異常検知手段2a−15から出力される異常フラグ2151が”0”のとき、PWM演算手段2a−13に対してPWMパルス信号の出力を許可するゲートスタート信号2171を出力する。
ネットワーク制御手段2a−1は、出力メモリ2a−16の+0番地に変換器制御手段2aのアドレスが格納されたことにより、図13に示すように、送信元アドレス301、受信先アドレス302、異常情報303及び予備304からなる異常データ300をネットワーク10に出力する。
異常検知手段2a−15により異常の有無を確認し(手順120)、空転/滑走による異常である場合は(手順121)、電流パターンを絞り、再粘着制御を実行する(手順122)。一方、過電圧、過電流又はPWMパルス信号による異常である場合は、電流パターンを”0”とすると共に(手順123)、PWMパルス信号261aを停止する(手順124)。更に、出力メモリ2a−16の+2,+4番地に車両制御手段1のアドレス($0000)及びこれらの異常情報を格納し(手順125)、+0番地に変換器制御手段2aのアドレス($0001)を格納する(手順126)。これにより、ネットワーク制御手段2a−1は異常データ300をネットワーク10に出力し(手順127)、処理を終了する。
一方、手順128において指令データ200が無い場合又は手順130において起動でないと判定した場合(図3(b)のスタートフラグが”0”)は、その時点の運転状態を判定し(手順137)、既に力行の処理を実行中の場合は手順133において引き続き、力行の処理を行う。また、手順137において力行中でないと判定し、ブレーキの処理を実行中と判定した場合(手順138)は、手順134において引き続き、ブレーキの処理を実行する。手順137、手順138において、力行、ブレーキの何れも実行中でないと判定した場合は、手順135と手順136の処理を実行し、最後に定期データを送信して(手順139)終了する。
以上の一連の処理を所定の周期で繰り返す。
なお、本実施形態では、1台の制御装置によって2台のインバータ装置を制御し、2台の誘導電動機を駆動する場合について説明したが、1台の制御装置によって2台以上の複数台のインバータ装置を制御し、2台以上の複数台の誘導電動機を駆動することができることは云うまでもない。
また、複数台の誘導電動機のうち1台が空転/滑走した場合、1台の車両制御手段によって他の誘導電動機のトルクを同時に低減する。このため粘着制御性能が向上する。
基本的な考え方としては、車両が図15の矢印方向に進行するとして、車輪Aが空転した場合、車輪Aの空転はその地点(以下、空転地点とする。)の踏面状態が悪い状態にあるためであり、続いてこの空転地点を通過する車輪Bも空転することが予想(予測)される。そこで、本実施形態では、車輪Bの空転が予測される空転地点に車輪Bが到達するまでに、変換器制御手段2bの出力トルクを低減し、車輪Bの空転を防止することを特徴とし、結果的に加速性能を向上させることにある。
ここで、事前に変換器制御手段2bの出力トルクを低減する方法としては、車輪Aが空転した時点から電流指令値を直ちに低減する方法、空転地点に達する直前に電流指令値を低減する方法、或いは、空転地点に達する直前に空転持続時間に比例して電流指令値を低減する方法等の様々な方法が考えられるが、本実施形態では、空転地点に達する直前に空転持続時間に比例して電流指令値を低減する方法により、空転地点に達する前後所定時間出力トルクすなわち電流指令値を低減する方法を例に説明する。なお、ここでは前記所定時間を1秒とするが、これは一例であり、任意に設定可能である。
まず、図示車輪A(誘導電動機7aで駆動)が空転した場合、変換器制御手段2aは図14に示す処理において再粘着制御(手順122)を実行し、更に手順125、126、127にて異常情報を車両制御手段1に対して送信する。
車両制御手段1は、この異常情報を受信し、図7の手順106において異常処理を実行する。異常処理は、図8のフローチャートに示すように、手順1061〜手順1066の処理を行う。
すなわち、まず、変換器制御手段2a、2bから送信される定期データの速度情報を基に車両速度vを求め(手順10661)、次に、車輪Aと車輪Bの間隔Lを(3)式に代入して車輪Bが空転地点に達するまでの時間Tを算出し、この時間Tになる前に補正を開始するとして、その補正開始時間T1、及びこの時間Tの後に補正を終了するとして、補正終了時間T2を求める(手順10662)。例えば、車両速度30km/h、車輪間隔Lが20mとすると、時間Tは2.4sとなり、この時間2.4sの前後に1秒間補正を行うとすると、T1=1.4s、T2=3.4sとなる。
T=L/v (3)
最後に、変換器制御手段2bの電流指令値Ipの補正量ΔIpを(4)式に示すように空滑信号の持続時間Δtに比例する値として算出し(手順10663)、所定のメモリに格納する(手順10664)。この結果は図7の手順110において、図17に示す電流指令値Ip’になるように制御される。
ΔIp=k・Δt
Ip’=Ip−ΔIp (4)
ここで、k:比例定数
図17において、(a)は空滑信号であり、車輪Aが空転地点で空転したことを表す。(b)は変換器制御手段2aから指令する出力電流であり、空転発生時に出力電流は減少し、その後徐々に増加する。(c)は変換器制御手段2bの電流指令値であり、時間Tは(3)式により求めた車輪Bが空転地点に達するまでの時間、時間T1及びT2はそれぞれ補正開始時間(車輪Bが空転地点に達する前の時間)及び補正終了時間(車輪Bが空転地点に達した後の時間)を表す。
例えば、図18に示すように、車輪Aの空滑信号の持続時間をΔtとしたとき、車輪Bに対する変換器制御手段2bの電流指令値1.0(=Ip)の補正量はΔIpとなり、補正量ΔIpは補正開始時間1s(Tの1秒前=T1に相当)と補正終了時間1s(Tの1秒後=T2に相当)の間継続し、変換器制御手段2bの電流指令値Ipは細線(本発明によるトルク減少分として図示)によって示す電流パターンをとる。因に、図20に示す従来例では太線(斜線部は従来の再粘着制御によるトルク減少分として図示)によって示す電流パターン(絞り時間0.5s、保持時間0.2s、戻し時間5s)をとる。図18において、ΔIpが20%の場合、従来の再粘着制御に比べて空転1回当たりのトルクの減少を約1/7に低減できる。
ここで、電流指令値Ipの補正分ΔIpは基本的には変換器制御手段2bで減少するトルクに見合ったものとすることが望ましいが、誘導電動機に流せる電流の許容値を考慮した値に制限する必要がある。このため、本実施形態では、(5)式に示すように、補正後の電流指令値Ip’が電流指令値の最大値Ipmax以下となるように制御する。
ΔIp=k・Δt
Ip’=Ip+ΔIp
ただし、Ip’>Ipmaxの場合
Ip’=Ipmax (5)
ここで、k:比例定数
また、複数台の誘導電動機のうち1台が空転及び滑走した場合、1台の車両制御手段によって他の誘導電動機のトルクを同時に低減できるため、粘着制御性能を向上させる。
また、空転及び滑走の発生頻度を低減できると共に、空転及び滑走が発生した場合でも車両全体としてのトルクの減少を最小限にすることができるため、所定の加速性能を得ることができる。また、これにより、空転及び滑走の発生しやすい線路条件下における乗り心地の低下を防止する。
Claims (2)
- ノッチ指令及びブレーキ力指令を含む運転情報を得て車両の運転状態を決定す
る車両制御手段と、決定した運転状態に応じて電力変換器を制御する変換器制御
手段を備え、1台の前記車両制御手段に対して複数台の前記変換器制御手段を接
続すると共に、前記複数台の変換器制御手段によって複数台の電動機を駆動する
車両用電力変換器の制御装置において、
前記複数台の変換器制御手段によって駆動される複数台の電動機の一台に空転
又は滑走が発生した場合、前記車両制御手段は、空転又は滑走が発生した変換器
制御手段より進行方向に沿って前方の変換器制御手段に対して、電動機のトルク
指令値を増加させる信号を送信することを特徴とする車両用電力変換器の制御装
置。 - 請求項1において、前記車両制御手段は、空転又は滑走が発生した前記変換器
制御手段から空転又は滑走データを受信し、空転又は滑走が発生した前記変換器
制御手段より進行方向に沿って前方の変換器制御手段に対して、電流指令値を増
加させる指令信号を送信し、電動機のトルクを増加させることを特徴とする車両
用電力変換器の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003358786A JP3796718B2 (ja) | 1996-09-25 | 2003-10-20 | 車両用電力変換器の制御装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35383296 | 1996-09-25 | ||
| JP2003358786A JP3796718B2 (ja) | 1996-09-25 | 2003-10-20 | 車両用電力変換器の制御装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003147424A Division JP2003348706A (ja) | 1996-09-25 | 2003-05-26 | 車両用電力変換器の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004135500A JP2004135500A (ja) | 2004-04-30 |
| JP2004135500A5 JP2004135500A5 (ja) | 2005-05-26 |
| JP3796718B2 true JP3796718B2 (ja) | 2006-07-12 |
Family
ID=32300044
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003358786A Expired - Fee Related JP3796718B2 (ja) | 1996-09-25 | 2003-10-20 | 車両用電力変換器の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3796718B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009072049A (ja) * | 2007-09-18 | 2009-04-02 | Toshiba Corp | 電気車制御装置 |
| JP2015033241A (ja) * | 2013-08-02 | 2015-02-16 | 株式会社東芝 | 駆動力許可指令装置、インバータ制御装置、車両制御装置、鉄道車両及び駆動力許可指令方法 |
| JP6479903B2 (ja) * | 2017-07-10 | 2019-03-06 | 東芝インフラシステムズ株式会社 | 鉄道車両、インバータ制御装置、及び駆動力許可指令方法 |
-
2003
- 2003-10-20 JP JP2003358786A patent/JP3796718B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004135500A (ja) | 2004-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3644174B2 (ja) | 電気自動車用制御装置 | |
| KR101408412B1 (ko) | 전동기의 구동 제어 장치 | |
| US6456909B1 (en) | Control apparatus of electric vehicle | |
| US20090195199A1 (en) | Motor drive device | |
| JPH06327101A (ja) | 電気自動車の制動装置 | |
| WO2007080728A1 (ja) | モータの制御装置 | |
| WO2005110802A1 (ja) | 電気車制御装置 | |
| JP5391456B2 (ja) | 電動機制御方法及び電動機制御装置 | |
| JP3538665B2 (ja) | 車両用電力変換器の制御装置 | |
| JP3796718B2 (ja) | 車両用電力変換器の制御装置 | |
| JP3129063B2 (ja) | 誘導電動機式電気車の制御装置 | |
| JP2003348706A (ja) | 車両用電力変換器の制御装置 | |
| EP0832779B1 (en) | A control apparatus for an electic vehicle | |
| JP2021027682A (ja) | 車両の駆動装置 | |
| JP2004033000A (ja) | 車両用電力変換器の制御装置 | |
| JP2003309901A (ja) | 車両用電力変換器の制御装置 | |
| JP2020174531A (ja) | 電動機制御方法および制御装置 | |
| JPH11332006A (ja) | 電気自動車制御装置 | |
| JP2009196533A (ja) | 回転電機制御システム及び当該回転電機制御システムを備えた車両駆動システム | |
| JP6577252B2 (ja) | 鉄道車両制御装置 | |
| JP4376759B2 (ja) | 電気車の制御装置及びそれを用いた電気車 | |
| JPH11205906A (ja) | 電気車の制御装置 | |
| JP2000168387A (ja) | 電動駆動力アシスト車両 | |
| EP0600364B1 (en) | Inverter controlled induction motor driving system for electric rolling stock | |
| JP6738751B2 (ja) | 電動機制御方法および制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040329 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060406 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100428 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110428 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120428 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120428 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130428 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140428 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |