JP3739738B2 - 関節アーム式移送装置 - Google Patents
関節アーム式移送装置 Download PDFInfo
- Publication number
- JP3739738B2 JP3739738B2 JP2002323543A JP2002323543A JP3739738B2 JP 3739738 B2 JP3739738 B2 JP 3739738B2 JP 2002323543 A JP2002323543 A JP 2002323543A JP 2002323543 A JP2002323543 A JP 2002323543A JP 3739738 B2 JP3739738 B2 JP 3739738B2
- Authority
- JP
- Japan
- Prior art keywords
- arms
- holding means
- arm
- speed
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000012546 transfer Methods 0.000 title abstract description 17
- 239000000758 substrate Substances 0.000 claims description 19
- 230000033001 locomotion Effects 0.000 claims description 18
- 239000004065 semiconductor Substances 0.000 claims description 7
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 210000000707 wrist Anatomy 0.000 abstract description 19
- 210000000323 shoulder joint Anatomy 0.000 abstract description 2
- 235000012431 wafers Nutrition 0.000 description 33
- 239000012636 effector Substances 0.000 description 28
- 230000007246 mechanism Effects 0.000 description 10
- 238000000926 separation method Methods 0.000 description 9
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 8
- 229910052710 silicon Inorganic materials 0.000 description 8
- 239000010703 silicon Substances 0.000 description 8
- 238000000034 method Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 210000002310 elbow joint Anatomy 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 244000208734 Pisonia aculeata Species 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 210000000245 forearm Anatomy 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- JBRZTFJDHDCESZ-UHFFFAOYSA-N AsGa Chemical compound [As]#[Ga] JBRZTFJDHDCESZ-UHFFFAOYSA-N 0.000 description 1
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 210000003857 wrist joint Anatomy 0.000 description 1
Images












Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
【発明の属する技術分野】
背景技術
1.発明の分野
本発明は、一般的には材料の移送装置に関する。移送される材料は、特に限定されるものではないが、例えば、シリコンやガリウム砒素などの半導体ウエハ、高密度相互接続基板(High Density Interconnects)などの半導体実装基板(semiconductor packaging substrate)、マスクやレチクルなどの半導体製造プロセスに用いられる像形成プレート、及びアクティブマトリックスLCD基板などの大面積表示パネルが挙げられる。
【0002】
【従来の技術】
2.従来技術
半導体素子の製造において、複数の作業ステーション即ち作業位置の間で壊れやすいシリコンウエハなどを移送する場合、その取扱いに関して特有の問題が発生する。シリコンウエハは非常に壊れやすく、また高度に研磨された表面を有している。ウエハは、急激に移動させると、滑り易い。そして、このような滑動によって、シリコンウエハは磨耗し、あるいは、衝突した場合にはそれらの縁部が損傷する。
シリコンウエハの移送装置として、以下に示す多くの従来技術が開示されている。
米国特許第3、823、836号は、シリコンウエハを保持する複数の棚を有する供給用移送台と、真空チャックを有する引出し装置とを備えた装置を開示している。真空チャックは、このチャックを上下動させる昇降機に取り付けられている。真空チャックに連結された水平移送アームによって、シリコンウエハは供給用移送台から所望のワークステーションに移送される。
米国特許第3、730、595号は、ウエハを作業ステーションに対して搬入出するための割り出し可能な移送台を有するウエハ移送取扱装置を開示している。ウエハは、複数の指向性を持つ空気噴出口を有するウエハ放出受入アームによって、空気スライド上のウエハ移送台に出し入れされる。このウエハの放出受入アームは、移送台と空気スライドの間でのウエハの移動を制御し、これによって、ウエハを作業ステーションとの間で移送する。
米国特許第4、062、463号、第3、874、525号及び第4、208、159号は、ウエハの取扱いに空気式要素又は把持装置を利用したウエハ移送装置を開示している。
米国特許第4、666、366号、及び第4、909、701号は、「蛙に似た」動作で伸長あるいは収縮してウエハのような対象物を複数の位置間で移送する関節式アーム組立体を有するウエハ移送取扱装置を開示している。2つの関節結合されたアームは、片方のアームがモータで駆動されると、これらの2つの関節結合されたアームが「蛙に似た」即ち「蛙の脚の蹴りに似た」動作で伸縮されるように、作動的に連結されている。出入台はアームに連結され、この載置台の上に被移送物が載置される。
【0003】
【発明が解決しようとする課題】
しかし、上記の移送装置の関節アーム組立体は、単一の載置台しか備えていないので、処理能力の点で限界がある。このような状況から、被移送物を損傷させず、かつ従来の装置と比較して処理能力を向上させることができる、単純な構造でかつ信頼性の高い移送装置に対する要求がある。
【0004】
【課題を解決するための手段】
発明の要約
本発明は、シリコンウエハ、カメラのレンズ、水晶発振子などの物品を、軸方向及び半径方向に広がる種々の面に配置された複数の位置間で移送するための単純な構造でかつ信頼性の高い装置を提供することを特徴とする。本発明の装置は、1つの支持体と、一対の上部アーム(あるいは駆動アーム)と関節接合された2組の前部アームと、前部アームの各組と連結された載置台(あるいはエンドイフェクタ(end effector)、又は他の適切な保持装置)と、上部アームの1つを駆動するモータによって構成されている。一対の上部アームと2対の前部アームは、1つの上部アームがモータによって駆動されると、前部アームが「蛙に似た」即ち「蛙の脚の蹴りに似た」動作で伸縮するように、作動的に連結されている。伸長位置のエンドイフェクタは物品がなく空で、引戻位置のエンドイフェクタに物品がある場合には、空でない側のエンドイフェクタには大きな加速度と速度を付与することなく(さもないと、物品である基板がエンドイフェクタに対して移動する)、空のエンドイフェクタは大きな加速度と速度で引き戻される。これにより、最初の基板の受渡しから次の基板の受渡しまでの時間的な間隔を短縮することができる。
関節アーム組立体は、好ましくは、関節アーム組立体の全体が半径方向の面内で回転できるように、回転モータを介して基部に連結される。単一の載置台を備えた従来装置と同様に、各エンドイフェクタが伸長位置にないときに、関節アーム組立体が回転される。しかし、従来技術と異なり、本発明の装置においては、1つのエンドイフェクタが完全な引き戻されていれば、他のエンドイフェクタは必ず完全に伸長位置に位置している。従って、本発明においては、両方のエンドイフェクタが中間の「一旦停止」の位置にあるとき、支持体が回転する。このような「一旦停止」の位置を設けた点が、本発明の1つの重要な特徴になっている。
また、1つの実施例では、関節アーム組立体は、好ましくは、載置台組立体を軸方向に移動させるように、力に反応する複数の可撓体あるいはレバーを介して基部に連結される。また、他の実施例では、載置台組立体が可撓体で得られるよりもさらに広い範囲にわたって軸方向に移動できるように、可撓体以外の手段によってアーム組立体が取り付けられる。この組立体は、例えば、真空室あるいは他の雰囲気の調整された環境など、種々の環境に適応可能である。また、この組立体は、組立体とその支持体間を真空シールで密封することによって、真空室内で移動できるように取り付けてもよい。
【0005】
発明の詳細な説明
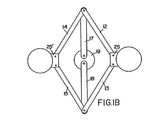
本発明の装置は、第1ショルダー旋回軸50と第2ショルダー旋回軸51とを有する。本装置の中心線は、この第1及び第2ショルダー旋回軸から等距離にある。第1上部アーム18は、第1ショルダー旋回軸50に回転可能に設けられ、第1ショルダー旋回軸から上部アームの長さだけ離間された少なくとも1つの第1エルボー旋回軸を含む第1エルボー関節手段を有する。第2上部アーム17は、第2ショルダー旋回軸51に回転可能に設けられ、第2ショルダー旋回軸から上部アームの長さだけ離間された少なくとも1つの第2エルボー旋回軸を含む第2エルボー関節手段を有する。一次側第1前部アーム12は、第1エルボー旋回軸に設けられ、第1エルボー旋回軸から一次側前部アームの長さだけ離間された一次側第1リスト旋回軸を有する。一次側第2前部アーム13は、第2エルボー旋回軸に設けられ、第2エルボー旋回軸から一次側前部アームの長さだけ離間された一次側第2リスト旋回軸を有する。一次側保持手段25は、一次側リスト旋回軸に取り付けられる。一次側の両リスト旋回軸の間に設けられた一次側連結機構は、一次側保持手段の回転を防いでその運動を前記の中心線に沿った移動に制限する。一次側前部アームの長さにいずれか一方の一次側リスト旋回軸と中心線との間の離隔距離を加えた合計は、いずれかのエルボー関節部と中心線との間の最大離隔距離よりも大きい。二次側第1前方アーム14は、第1エルボー旋回軸に設けられ、第1エルボー旋回軸から二次側前方アームの長さだけ離間された二次側第1リスト旋回軸を有する。二次側第2前方アーム15は、第2エルボー旋回軸に設けられ、第2エルボー旋回軸から二次側前方アームの長さだけ離間された二次側第2リスト旋回軸を有する。二次側保持手段25’は、両リスト旋回軸に取り付けられる。二次側の両リスト旋回軸の間に設けられた二次側連結機構は、二次側保持手段の回転を防いでその運動を中心線に沿った移動に制限する。二次側前部アームの長さにいずれか一方の二次側リスト旋回軸と中心線との間の離隔距離を加えた合計は、いずれかのエルボー関節部と中心線との間の最大離隔距離よりも大きい。さらに、第1上部アームを120°を越えて180°以下の角度範囲で回転可能に駆動する手段を設け、この手段によって、一次側保持手段を一次側の伸長位置と一次側の引戻し位置間で移動させ、同時に二次側保持手段を二次側の引戻し位置と二次側の伸長位置間で移動させる。
【0006】
保持手段は、半導体ウエハなどを保持するのに用いられる。この保持手段は中心線に沿って移動する。また、この保持手段の速度は、エルボー旋回軸の速度の、中心線に平行な方向の成分の関数である。従って、上部アームの角速度が一定であれば、上部アームが互いに拡開したときに支持体の速度が最大になる。
【0007】
ここで、前部アームの長さにいずれか一方のリスト旋回軸と中心線との間の離隔距離を加えた大きさを「A」とし、上部アームの長さにいずれか一方のショルダー旋回軸と中心線との間の離隔距離を加えた大きさを「B」とすれば、以下の関係が成立する。もし、AがBより小さければ、システムは、上部アームが互いに拡開する前に作動不能になる。もし、A=Bで、かつショルダー旋回軸の中心軸からの離隔距離がリスト旋回軸の中心軸からの離隔距離と等しいなら、各前部アームは互いに重ね合わさるように移動可能である。もし、A=Bで、リスト旋回軸の中心線からの離隔距離がショルダー旋回軸の中心線からの離隔距離よりも大きいなら、リスト旋回軸はショルダー旋回軸を「行過ぎる」可能性がある。もし、A=B(あるいは、AがBよりも大)で、かつリスト旋回軸の中心軸からの離隔距離がショルダー旋回軸の中心軸からの離隔距離よりも小さいなら、リスト旋回軸はショルダー旋回軸と重なることはない。
本装置は、中心線に対して、互いに対称である。
【0008】
通常、前部アームの長さと上部アームの長さの差は非常に小さいが、この条件では、保持手段は、完全に伸長された位置と一旦停止位置の間でアーム長さのほぼ二倍の距離だけ移動し、一方、一旦停止位置と完全に引き戻された位置間では、前記の差よりわずかに長い距離しか移動しない。
【0009】
本発明の装置の能力は、以下に示すような駆動構造の特性により、単一の駆動機構により、共通の中心線に沿う異なる速度を2つのエンドイフェクタに与えることができる点にある。駆動機構の要素が簡素化された場合に、各エンドイフェクタは、ほぼ菱形の駆動構造によって駆動される。その菱形構造においては、1つの頂点が旋回軸として選択され、その旋回軸の回りに、その頂点に隣接する両側の辺が回動する。いま、この菱形構造の運動について考えると、頂点に隣接した両側の辺が回動すると、頂点の角度は180°になって菱形の面積が消失し、隣接する一対の側部が他の隣接する1対の辺に重なり合う。そして、さらに回転すると、2対の辺は、以下の2つの運動のいずれかを示す。すなわち、菱形を開くように回動するか、閉じられた菱形を保持するように、2対の辺が重なり合ったままの状態で回転する。前者は、旋回軸である頂点と反対側の頂点が高速度で旋回軸である頂点から離れるように移動する。後者は、これらの頂点のいずれに対しても移動速度を付与しない。
【0010】
本発明の装置の構造は、上記の性質を利用して、2つの駆動構造に異なった運動を与えるようにしたものである。すなわち、1つの駆動構造は菱形を開くように作動され、そのエンドイフェクタに大きな速度を与え、一方、他の駆動構造は閉じられた菱形を保持するように作動され、そのエンドイフェクタに無視できる程度の速度しか与えない。
【0011】
本発明による装置の構造は、一端において連結された互いに反対方向に回転する1対の駆動アームを有する駆動機構を備え、駆動アームが端部を中心として回転すると、それら自由端が(中心線に関して)鏡映対称(ミラー・イメージ)の半円弧軌道に沿って移動する。互いに離間された2対の前部アームは、駆動アームの自由端の間に結合され、また、各対の前部アームは前部アーム相互の接続部において保持手段(エンドイフェクタなど)を支持する。2対の前部アームによって形成されたリンク構造は、通常は純粋の菱形ではなく、偏菱形である。詳しくは、前部アームの各対は、駆動アームと共に偏菱形の駆動構造を形成する。駆動アームが一方の移動端に位置する状態(この状態では、駆動アーム同士が実質的に隣合い、1つの保持手段が駆動アームの連結端部から突き出される)から「一旦停止」の位置(この状態では、駆動アームは互いに直線状に拡開される)に移動するとき、突き出されている保持手段は一旦停止位置に向かって急速に移動し、偏菱形リンク構造によって形成される面積は中心線に沿った狭い帯形から正方形にまで拡張し、その後、収縮して中心線と直交する狭い帯形となる。駆動アームと引戻される保持手段を有する前部アームとによる偏菱形構造によって形成される面積は実質的にリンク構造と同じような形状の変化を示す。一方、駆動アームと引戻されない側の保持手段を有する前部アームによって形成される面積はわずかであり、従って、引戻されない側の保持手段はわずかしか移動しない。
【0012】
駆動アームが「一旦停止」位置を越えて、反対側の移動端(この状態では、駆動アーム同士が実質的に隣合い、かつ他方の側の保持手段が駆動アームの連結端部から突き出される)に向かうとき、上記の一旦張り出され、その後引戻された保持手段はわずかしか移動せず、偏菱形リンク構造によって形成される面積は中心線と直交する狭い帯形から正方形まで拡張され、その後、中心線に沿った狭い帯形にまで収縮される。駆動アームと新たに張り出される保持手段を有する前部アームとによって形成される偏菱形面積は、リンク構造と実質的に同じような形状な変化をもたらす。一方、駆動アームと引戻される保持手段を有する前方アームによって形成される面積はわずかしか変化しない。
【0013】
このように、本発明の特徴は、上記の菱形構造の特性を偏菱形構造に応用し、単一の駆動機構によって2つのエンドイフェクタに異なった速度を付与するようにしたものである。
【0014】
すなわち、本発明によれば、第2のエンドイフェクタには大きな加速あるいは減速を与えずに、引戻されるアームを非常に急速に、かつ安全に加速及び減速することができる。従って、伸長位置のエンドイフェクタはウエハを受け渡した後に空になるが、引戻位置のエンドイフェクタはウエハで占有されたままになる場合においては、動作能力の点で利点をもたらすことができる。多くの用途で、ウエハは表面摩擦のみでエンドイフェクタに保持されているので、ウエハを保持するエンドイフェクタの急速な加速あるいは減速によりウエハがエンドイフェクタ上でずれてしまう恐れがあり、これは好ましくないことである。
【0015】
図1A,1B及び1Cは、本発明による関節アーム組立体10を示している。関節アーム組立体10は、1対の第1前部アーム12と13、及び一対の第2前部アーム14と15を備えている。各前部アームは、1つの上部アーム(前部アーム12及び13の下側に示されている)とピン結合16のような適当な手段によって関節接合されている。これらの前部アームは、上部アーム17と18(図1Bを参照)によって駆動される。
【0016】
図1A、1B及び1Cは、関節アーム組立体10の3つの基本的な位置を示している。図1Aは、基台19に対して実質的に完全に左側に伸長された位置にある組立体10を示す。図1Bは、基台19に対して一旦停止位置、即ち“原”位置にある組立体10を示す。そして、図1Cは、基台19に対して実質的に十分に右側に伸長された位置にある組立体10を示す。
【0017】
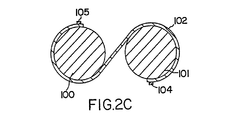
図2に示すように、上部アーム17と18は一般的に円形ギア20と21をそれぞれ備えている。ギア20と21は、上部アーム17と18の一部として一体的に形成するか、あるいは個々に形成してから適当な固定方法によって上部アームに固定してもよい。ギア20は、駆動ピニオン22と操作可能に連結されている。ギア20が駆動ピニオン22によって駆動され、そのギア20がギア21を駆動する。駆動ギア20と21及びピニオン22の代わりに、摩擦表面あるいはバンド・ドラム組立体のような適当な駆動機構を用いてもよい。図2B、2C及び2Dは、適切なバンド・ドラム組立体を示す。これらの図において、ドラム100は2つのバンド102及び103によってドラム101と連結している。バンド102は、ねじ104(あるいはリベット又は溶接のような他の取付手段)によってドラム101に固定され、バンド102は、ねじ105によってドラム100に固定される。バンド103は、ねじ107によってドラム100に固定される。バンド103は、ねじ107によってドラム100に固定される。バンド102と103には張力がかけられ、これらは金属によって構成してもよい。各バンドは略S字形の形状を有し、この形状は2つのバンドにおいて互いに逆になっている。こうしてバンド100が時計回りに回転すると、ねじ105はバンド102を引っ張り、これによって、ねじ104が引っ張られ、ドラム101は反時計回りに回転する。バンド100が反時計回りに回転すると、ねじ107はバンド103を引っ張り、これによって、ねじ106が引っ張られ、ドラム101は時計方向に回転する。従って、ドラム100と101のいずれかが回転すると、他のドラムは反対方向に回転する。
【0018】
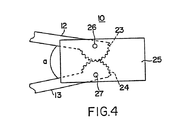
図4に示すように、前部アーム12と13のリスト関節部は、半円形の回転防止ギア23と24を備える。物品を運搬する載置台(あるいはエンドイフェクタ又は他の適切な保持具)は、回転防止ギア23と24に軸受26と27によって連結されている。この回転防止ギア23と24の代わりに、摩擦表面あるいはドラム・バンド組立体のような上部アーム12と13の端部の回転を防ぐ適当な手段を用いてもよい。同様に、前部アーム14と15は、回転防止ギアなどとそれに連結される載置台を備える。
【0019】
駆動ピニオン22が時計回りに回転すると、ギア20と駆動アーム17は反時計回りに回転し、ギア21と駆動セグメント18は時計回りに回転することは明らかである。
【0020】
その結果、前部アーム14と15は「蛙に似た」動作で引き戻され、載置台25’を駆動ギア20と21に向かって移動させる。回転防止ギア23’と24’は載置台25’の旋回を防ぎ、これによって、被移送物を直線的に移動させることができる。
【0021】
載置台25’が駆動ギア20と21に向かって引き戻されると、前部アーム12と13は、それらの上部アーム12と13間の角度「a」(図4を参照)が大きくなるように移動する。しかし、駆動ギア20と21を十分に越え、完全に左側に伸長した位置にある載置台25は、図1Bに示される一旦停止位置で最大速度に達するまで、停止状態から非常にゆっくりと加速される(動作制御曲線による制御)。その後、載置台25’は、駆動ギア20と21を十分に越える位置に向かって移動し、前部アーム12と13は伸長を続ける。
【0022】
種々の理由によって、前部アーム12、13、14及び15の長さ(すなわち、旋回軸間の距離にリスト旋回軸と中心線との間の離隔距離を加えた大きさ)は、上部アーム17と18の長さ(すなわち、旋回軸間の距離にショルダー旋回軸と中心線との間の離隔距離を加えた大きさ)より大きく設定しなければならない。滑らかな動きを達成するためには、前部アームを上部アームよりわずかに(例えば、約0.25インチ)長く設定するとよい。この前部アームの長さは、被移送物の寸法に依存する。物品が大きいほど、アームを長く設定する必要がある。
【0023】
図2は、本発明にも利用できる従来装置の分解等角投影図である。関節アーム組立体10は、ショルダー関節部50と51を介してC字形の支持体30に配置されている。電動モータ31は支持体30に取り付けられ、駆動ピニオン22に接続されている。駆動ピニオンはギア20と係合し、ギア20がギア21を駆動し、これによって、関節アーム組立体10を前記のように伸縮する。支持体30は、第2のC字形支持体33に軸支された軸32と連結されている。軸32は、電動モータ35と接続される回転ギア34を備え、関節アーム組立体10を全体的に回転する。本発明によれば、アームが一旦停止位置にあるとき、載置台25と25’は、ほとんど軸32上の中心にあり、移送される1つあるいは複数の基板にかかる遠心力を最小化することができる。
支持体33は、C字形支持体37と38及び可撓体41〜44を介して基台36と連結されている。ソレノイドのような上昇機構40が基台36に配置され、レバー45と結合されている。レバー45は軸32の下方に配置されている。レバー45の一端は、基台36に配置された第1支点46として作用し、第2支点(図2Aを参照)は軸32の底部に配置されている。機構40が作動されると、軸32は軸方向において上方に変位し、可撓体41〜44を撓ませる。軸32が軸方向に変位すると、関節アーム組立体10もまた全体的に軸方向に変位することは明らかである。
【0024】
本発明によれば、関節アーム組立体10を精密に制御するために、モータ31と35及び上昇機構40の内、1つ以上は電子論理回路(図2には図示せず)によって制御される。
【0025】
前部アーム12、13、14及び15は、関節部が前記の動きに悪影響を与えないような適当な手段によって上部アーム17と18に連結される。図3は、互いに対向する各前部アームが同じ軸に結合されている単一軸のエルボー関節の実施例を示す。前部アーム15は、その連結端において、エルボー軸82が貫通する穴を有するC字形部80を備えている。同様に、前部アーム13は、その連結端において、エルボー軸82が貫通する穴を有するC字形部81を備えている。エルボー軸82は上部アーム18に固定され、この上部アームと協働してエルボー関節部を形成する。前部アーム13は段付部83を有し、載置台25は載置台25’と同じ水平面内にある。
【0026】
図5及び図6は、本発明の装置の動作と一対の前部アームしか有しない従来装置の動作を比較した例を示す。これらの図において、モジュール(構成単位)1はウエハが処理される領域を、そしてモジュール2及び3はそれぞれ処理されたウエハと未処理のウエハを保持する領域を示している。表1及び表2は、それぞれ、図5と図6に対応する関節アーム組立体の位置とプロセスモジュールの状態を示す。
【0027】

上記より、本発明の複合アームは、プロセスモジュールの不作動時間を最小化し、それによってシステムの処理能力を向上させるという利点を有することが判る。
【0030】
本発明はまた、第1エンドイフェクタを伸長させて基板をプロセスモジュールに受け渡すとき、第2エンドイフェクタ上の基板の中心は、駆動軸の位置を越えてその開放されたプロセスモジュールに接近することがない、という点に利点がある。これによって、第2基板はガスあるいは粒子によって汚染されたり、又は開いているプロセスモジュールの近傍において加熱あるいは冷却によって影響されることがない。図7は、本発明のこの特徴を詳細に示される。
【0031】
図8は、同じアームが一旦停止位置にある状態を示している。この設計では、エンドイフェクタは、アームが一旦停止位置にあるとき、回転中心に非常に接近する。
【0032】
エンドイフェクタの動きに対して速度及び/又は加速度の曲線を制御するのに、電子的あるいは機械的な制御手段(200)(図7及び図8参照)を利用することができる。図9に示すように、制御手段(200)の、動作パターンを与える代表的な制御システム(200A)は、IBMのPCコンピュータと、そのコンピュータにシリアルの通信線を介して接続され、ハーモニックドライブ(RHー11 6001ーE100A)のようなギアモータ/エンコーダパッケージを制御するブルックス・オートメーション社の制御PCボード#11951によって構成される。
【0033】
以上、実施例とともに本発明の原理を述べたが、実施例における特定の表現は包括的な例示であって、以下に述べる請求の範囲に述べられた本発明の範囲を限定するものではない。
【図面の簡単な説明】
【図1A】 左側に伸長された位置にある、本発明による関節アーム組立体の平面図。
【図1B】 一旦停止位置にある、本発明による関節アーム組立体の平面図、
【図1C】 右側に伸長された位置にある、本発明による関節アーム組立体の平面図。
【図2】 本発明の実施例に用いられる従来装置の等角投影図。
【図2A】 図2に示す装置の側面図。
【図2B】 バンド・ドラム組立体の側面図。
【図2C】 図2Bの線2C−2Cに沿った断面図。
【図2D】 図2Bの線2D−2Dに沿った断面図。
【図3】 本発明による関節アーム組立体の側面図。
【図4】 図3の関節アーム組立体の部分平面図。
【図5】 本発明による関節アーム組立体を用いた処理順序を示す概略図。
【図6】 従来装置を用いた処理順序を示す概略図。
【図7】 1つのウエハが処理室にあって、他のウエハが引戻し位置にある状態を示す図。
【図8】 図7のアームが停止位置にある状態を示す図。
【図9】 典型的な運動制御(motion control)サーボのブロック図である。
Claims (4)
- 対象物(A、B)を搬送する装置であって、
支持体(19)に回転可能に接続された2つの上部アーム(17、18)と、
2対の前部アームであって、各対の前部アームは前記2つの上部アームの対向する夫々の外端に回転可能に接続されている、2対の前部アーム(12、13、14、15)と、
前部アームの第1の対(12、13)に接続する第1対象物保持手段(25)と、
前部アームの第2の対(14、15)に接続する第2対象物保持手段(25’)と、
該保持手段(25、25’)を上昇させるための手段(40)と、
対象物保持手段(25、25’)の中の少なくとも1つの動きを制御可能な手段(200)と、を備え;
前記制御可能な手段(200)により対象物保持手段(25、25’)の中の少なくとも1つが第1速度で、最初と最後の位置間の第1方向に動かされ、
そして該最後の位置から逆戻りするときに、第2速度で、前記第1方向とは反対の第2方向に動かされ、
前記第2速度は第1速度とは異なる;
対象物搬送装置。 - 前記2つの上部アーム(17、18)間において、
該2つの上部アーム(17、18)を一緒に反対方向に回転させるためのメカニカルカップリング(20、21)を更に備えた、
請求項1の装置。 - 前記上昇させるための手段(40)は、前記支持体(19)に接続され、前記上部アームの中の第1アームの第1の回転軸に実質的に平行な方向に前記支持体を動かすための手段を更に備えた、
請求項1の装置。 - 半導体サブストレイトを搬送するための装置(10)であって、
支持体(19)に接続する2つの駆動アーム(17、18)と、
2対の被駆動アームであって、各被駆動アームの対は前記2つの駆動アームの対向する外端に回転可能に接続している、2対の被駆動アーム(12、13、14、15)と、
前記被駆動アームの第1の対(12、13)に接続する第1のサブストレイト保持手段(25)と、
前記被駆動アームの第2の対(14、15)に接続する第2のサブストレイト保持手段(25’)と、を備え;
前記駆動アームは互いに接近及び離間するように回転可能であり、これにより2対の被駆動アームを動かし、
該被駆動アームはこれにより、支持体に接続された2つの駆動アームの回転範囲に関係して、前記第1と第2のサブストレイト保持装置を伸張し且つ引戻すことが可能であり、
そして該各サブストレイト保持装置に伸長位置、引戻位置及び完全引戻位置を供給し;
更に、駆動アーム(17、18)の回転を制御するための手段(200)を備え、
これによりサブストレイト保持手段(25、25’)の中の少なくとも1つが第1速度で、伸長位置と引戻位置間の第1方向に動かされ、
前記少なくとも1つのサブストレイト保持手段が第2速度で、伸長位置と引戻位置間の前記第1方向とは反対の第2方向に動かされ、
前記第2速度は第1速度とは異なる;
半導体サブストレイトを搬送するための装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323543A JP3739738B2 (ja) | 2002-11-07 | 2002-11-07 | 関節アーム式移送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323543A JP3739738B2 (ja) | 2002-11-07 | 2002-11-07 | 関節アーム式移送装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP51254194A Division JP3419457B2 (ja) | 1991-04-18 | 1992-12-30 | 関節アーム式移送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003188233A JP2003188233A (ja) | 2003-07-04 |
| JP3739738B2 true JP3739738B2 (ja) | 2006-01-25 |
Family
ID=27606768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002323543A Expired - Lifetime JP3739738B2 (ja) | 2002-11-07 | 2002-11-07 | 関節アーム式移送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3739738B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108214239A (zh) * | 2018-01-16 | 2018-06-29 | 宁波三葵研磨材料有限公司 | 一种三维立体打磨机 |
-
2002
- 2002-11-07 JP JP2002323543A patent/JP3739738B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003188233A (ja) | 2003-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3419457B2 (ja) | 関節アーム式移送装置 | |
| JP3558345B2 (ja) | 関節アーム式移送装置 | |
| KR960005240B1 (ko) | 기판처리장치 | |
| KR970004947B1 (ko) | 핸들링장치 | |
| US20110135437A1 (en) | Horizontal multi-joint robot and transportation apparatus including the same | |
| TWI627040B (zh) | Substrate transfer robot and its end effector | |
| JP4231552B2 (ja) | 幅広リスト・屈曲アームを有する物体移送装置 | |
| KR20000023807A (ko) | 물품핸들링장치 및 그 방법 | |
| CN101801615A (zh) | 基板搬送机械手、真空处理装置 | |
| KR20020079469A (ko) | 로보트 암기구 | |
| KR100281454B1 (ko) | 로드로크용 로드암 | |
| CN101253616B (zh) | 工件传送装置 | |
| US20010033788A1 (en) | Dual multitran robot arm | |
| US20060157998A1 (en) | Contamination-free edge gripping mechanism and method for loading/unloading and transferring flat objects | |
| WO2000042650A1 (fr) | Dispositif de traitement sous vide | |
| JP2000195923A (ja) | 搬送用ロボット、搬送装置、真空チャンバ内搬送装置およびプロセス処理装置 | |
| JP3739738B2 (ja) | 関節アーム式移送装置 | |
| JPH07171778A (ja) | 多関節搬送装置,その制御方法及び半導体製造装置 | |
| JP3539537B2 (ja) | 多関節ロボット | |
| JP4199432B2 (ja) | ロボット装置及び処理装置 | |
| JPH0630372B2 (ja) | 半導体ウエハ処理装置 | |
| JP2000042952A (ja) | 搬送装置及び搬送方法 | |
| CN114126807B (zh) | 非对称双末端执行器机器人臂 | |
| JPH10581A (ja) | ワーク搬送ロボット | |
| CN116654490A (zh) | 一种用于传送晶圆的机械臂 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040524 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040823 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20050307 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050512 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20050628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051102 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111111 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121111 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131111 Year of fee payment: 8 |
|
| EXPY | Cancellation because of completion of term | ||
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131111 Year of fee payment: 8 |