JP3636185B2 - Induction heating cooker - Google Patents
Induction heating cooker Download PDFInfo
- Publication number
- JP3636185B2 JP3636185B2 JP2002268558A JP2002268558A JP3636185B2 JP 3636185 B2 JP3636185 B2 JP 3636185B2 JP 2002268558 A JP2002268558 A JP 2002268558A JP 2002268558 A JP2002268558 A JP 2002268558A JP 3636185 B2 JP3636185 B2 JP 3636185B2
- Authority
- JP
- Japan
- Prior art keywords
- cooking
- weight
- rice
- pan
- detecting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Induction Heating Cooking Devices (AREA)
- Cookers (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は、誘導加熱調理器に関するものである。
【0002】
【従来の技術】
誘導加熱調理器は、高周波電流を加熱コイルに供給することにより、この加熱コイルに磁気結合されている被加熱物、例えば調理鍋を加熱している。また、加熱コイルと被加熱物を介するプレートの内部に温度検知手段を設けることによって、調理鍋の温度を検出している。調理鍋は、熱源の熱を直接調理物に伝える役割をするので、使用する鍋の受熱特性によって、調理のできばえに差を生じる。
【0003】
従来、誘導加熱調理器において炊飯を行う場合には、被加熱物にステンレスや鉄といった高抵抗金属の調理鍋を使用していた。ステンレスや鉄といった金属は熱伝導率が低く、底面のみを加熱する誘導加熱調理器においては、底面と側面との温度差が大きくなっていた。
【0004】
【特許文献1】
特開平07−222677号公報
【0005】
【発明が解決しようとする課題】
しかし、鍋の底面のみを加熱するという誘導加熱調理器の特徴により、火加減の制御が難しく、温度検知手段のみによる加熱制御では、負荷量によっては底面が焦げているのに上面は水っぽい仕上がってしまい、ムラのある炊き上がりになっていた。
【0006】
本発明は、重量を検知する検知手段を有することにより安定した炊きあがりのご飯を提供することができる誘導加熱調理器を提供することを目的とする。また、熱伝導率が高いアルミニウム等の低抵抗金属の調理鍋を使用できるので、底面のみを加熱する誘導加熱調理器でも側面まで熱が伝わりやすく、炊きムラなく炊飯を行うことができる。
【0007】
【課題を解決するための手段】
前記従来の課題を解決するために、前記加熱コイルの発生する磁界がアルミニウム等低抵抗金属の被加熱物に対して働く浮力を検知する浮力検知手段と加熱を検知する加熱検知手段とにより鍋の重量を検知する鍋重量検知手段と、前記被加熱物の温度を検知する温度検知手段を有し、鍋重量の検知手段の検知結果と温度検知手段の検知に応じて、安定したできばえを提供できる炊飯モードを有する。
【0008】
【発明の実施の形態】
請求項1に記載の発明は、アルミニウムまたはアルミニウムと同等以上の電気伝導率を有する低透磁率材料からなる被加熱物を誘導加熱可能な加熱コイルと、前記加熱コイルに高周波電流を供給するインバータ回路と、前記インバータ回路の出力の大きさを検知する出力検知手段と、前記加熱コイルの発生する磁界が前記被加熱物に対して働く浮力を前記出力検知手段の出力により検知する浮力検知手段と、前記浮力検知手段の出力により鍋の重量を検知する鍋重量検知手段と、前記鍋重量検知手段の検知した鍋重量を記憶する鍋重量記憶手段と、前記被加熱物の温度を検知する温度検知手段を有し、前記鍋重量検知手段の検知結果と前記温度検知手段の検知に応じて、加熱コイルの加熱量を制御し炊飯を行う炊飯モードを有することにより、被加熱物である調理鍋の底面のみを加熱する調理器である電磁誘導加熱調理器においても、炊き上がりにムラのないできばえの安定した炊飯を行うことができる。
【0009】
請求項2に記載の発明は、請求項1の構成において、調理コースを選択できる選択手段を備え、調理コースを選択した際に前記制御手段は調理コースに応じた炊飯を行うことにより、通常の白米炊飯だけではなく、おかゆや玄米、高速炊飯などといった調理コースを選べるようになり、調理者に様々なメニューを提供することができる。
【0010】
請求項3に記載の発明は、請求項1または2の構成において、前記炊飯モードにおいて前記温度検知手段によって初期温度を検知し、検知結果に応じて炊飯を行う炊飯モードを有することにより、誘導加熱調理器の設置環境に関わらず安定したできばえの炊飯を行うことができる。
【0011】
請求項4に記載の発明は、請求項1〜3のいずれか1項の構成において、前記炊飯モードにおいて、炊き上がり調理物の硬さを選択できる第2の選択手段を有し、前記制御手段は、前記重量検知手段の検知結果により、炊き上がり時の重量を変更させて、炊き上がり調理物の硬さを変更する制御を行うことにより、調理者の好み、用途に応じた硬さのご飯の炊飯を実行することができる。
【0012】
請求項5に記載の発明は、請求項1〜4のいずれか1項の構成において、前記炊き上がり調理物の硬さを選択できる第2の選択手段と前回の炊き上がり調理物の硬さを記憶する第2の記憶手段を備え、炊き上がり調理物の硬さを選択しない場合は、前回と同じ炊き上がり硬さに調理物を仕上げることにより、調理者が調理毎に炊き上がり調理物の硬さを選択する手間を省くことができる。
【0013】
請求項6に記載の発明は、請求項1〜5のいずれか1項の構成において、前記炊飯モードにおいて、前記鍋重量検知手段の出力により、およそ全調理時間を推定し、調理残時間を表示する表示手段を備えたことにより、炊飯開始直後から調理者がおよそ残調理時間を知ることができる。
【0014】
請求項7に記載の発明は、請求項1〜6のいずれか1項の構成において、前記炊飯モードにおいて炊飯終了予定時刻を入力するタイマ入力手段を備えることにより、調理者の所望の時間に調理物を提供することができる。また前記重量検知手段により、調理を開始せずに合数の判定を行うので、炊飯に必要な時間よりも前に加熱を行う必要が無く、時間を合わせるのために調理終了後の余分な保温時間をほぼなくすことができる。
【0015】
【実施例】
以下本発明の実施例について、図面を参照しながら説明する。
【0016】
(実施例1)
図1は、本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図である。
【0017】
図1において、1は誘導加熱調理器本体トッププレートであり、2は調理鍋、3は加熱コイル、4は被加熱物の温度を検知するセンサで、トッププレート1の略中央の裏面に設けられている温度検知手段、5は加熱コイル3に高周波電流を供給するインバータ回路、6はインバータ回路5の出力の大きさを検知する検知手段、7は加熱コイルの発生する磁界が前記被加熱物に対して働く浮力を検知する出力検知手段6の出力により検知する浮力検知手段、8は浮力検知手7段の出力により鍋重量を検知する鍋重量検知手段、9は前記鍋重量検知手段の検知した鍋重量を記憶する鍋重量記憶手段、10は時間を計測する計時手段、11は加熱コイル3に流す高周波電流を制御する制御手段である。制御手段11は、加熱コイル3への通電を制御プログラムによって制御しているもので、本実施例ではマイクロコンピュータを使用している。温度検知手段4の検知温度と、鍋重量検知手段8の検知結果は、制御手段11に伝えられ通電がコントロールされている。
【0018】
図2において、横軸はインバータ回路5への入力電力を、縦軸は鍋に働く浮力を示している。インバータ回路5に安定的に入力しうる最大値の結果から鍋に働く浮力の大きさを得て鍋重量検知手段8は鍋重量を判断しているのである。
【0019】
以下、本実施例における動作について説明する。
【0020】
まず調理鍋を空の状態で通電をし、鍋重量検知手段8で空の状態の鍋重量を検知し、鍋重量記憶手段9が結果を記憶する。鍋の重量のみを検知する場合は、通電のみを行い炊飯モードに入らないことから、鍋重量を検知することを目的とした通電であると判断する。なお、炊飯モードに入る前回の通電における鍋重量の検知結果を記憶するものとする。
【0021】
本実施例では図3に示すような炊飯工程を行う。炊飯工程に入る前に、鍋重量を検知し、先に検知した空の状態の鍋重量とから炊き上げ目標鍋重量を決定し、鍋重量記憶手段9に記憶する。次に、最初の前炊き工程に入る。前炊き工程の目標温度は約60℃である。このとき、約60℃の湯で米に吸水させることによって、米でんぷんの膨潤を促進し、米はα化に必要な水分を中心部まで充分に吸水することが出来るの吸水をよくすることができる。
【0022】
また、アミラーゼの活性が高くなり、でんぷんが分解されやすくなり、甘味が増す。次に、重量検知手段8r、温度検知手段4の結果が約3分後に60℃になるように、計時手段10および制御手段11によって出力電力を決定する。その後約7分間、温度検知手段4の結果が約60℃を保つように、計時手段10および制御手段11によって通電を制御する。次の炊き上げ工程は強火で勢い良く沸騰させる工程である。炊き上げ工程の目標温度は水が沸騰する100℃である。温度検知手段4による結果が5分後に100℃に到達するように、制御手段11は入力値を制御する。沸騰維持工程に入ってからは、定期的に鍋重量を検知する目的でインバータ回路5が加熱コイル3へ高周波電流を供給し、出力検知手段6が出力値を検知する。出力検知手段6の検知結果より浮力検知手段7が浮力を検知し、前記浮力手段7の検知結果から鍋重量検知手段8が鍋重量を検知する。鍋重量検知手段8の検知結果が鍋重量記憶手段9に記憶されている炊き上がり目標重量に達すると、制御手段11に伝え、出力値を小さくし、最終工程の蒸らし工程に入る。蒸らし工程では出力値を小さくして、調理鍋の温度が急激に下がることを避ける。煮沸が終了したご飯は、でんぷんのα化が充分でないので、高温を維持することによってα化の進行を助ける必要があるためである。約10分間の蒸らし工程の後に調理を終了する。
【0023】
本実施例では、白米2合を450gのアルミニウム製の調理鍋で炊飯した場合の例を示す。まず、調理鍋を空の状態で本体に載せ通電し、鍋重量を鍋重量記憶手段9に記憶させる。次に白米2合300g、水440gを調理鍋に入れ、炊飯を開始する。空の状態と同様に鍋重量検知手段8によって鍋重量を検知し先に検知した鍋のみの重量から調理物の重量を検知し、本実施例の場合、炊き上げ目標鍋重量を次のように計算する。炊き上がりのご飯の重量を米の重量の2.3倍とすると
300×2.3+450(鍋重量)=1140g
となる。
【0024】
目標炊き上げ重量決定後、炊飯工程に入る。最初の工程の前炊きは本実施例では2合であるので、600W出力するとし、温度検知手段4による結果が約60℃に達した時点で、約60℃を保つように入力値を制御手段11によって制御しながら、米に吸水させる。加熱開始後、約10分経過したところで、炊き上げ工程に入る。
【0025】
本実施例では、炊き上げ工程におけるでの入力値は1000Wとする。炊き上げ工程終了後、沸騰維持工程では、炊き上げ目標重量になるまで約15分間沸騰を維持できるように、制御手段11は通電を制御する。沸騰維持工程に入ってからは30秒間おきに鍋重量を検知するためにインバータ回路5が加熱コイル3へ高周波電流を供給し、出力検知手段6が出力値を検知する。出力検知手段6の検知結果より浮力検知手段7が浮力を検知し、前記浮力手段7の検知結果から鍋重量検知手段8が鍋重量を1140gと検知後、沸騰維持工程を終了し、蒸らし工程に入る。蒸らし工程では、出力値を300Wの8秒オン8秒オフを繰り返し、10分経過した後、調理が終了する。
【0026】
(実施例2)
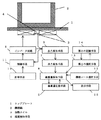
図4は本実施例における、本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図であるが、基本的には実施例1と同じであり、調理コース選択手段12のみが追加されている。調理コース選択手段12により、おかゆコース、玄米コース、高速炊飯コースといった調理コースを選択できるようになり、それぞれに応じた調理プログラムが制御手段11によって行われる。
【0027】
本実施例では、炊飯モードにおいて、図5に示すような高速炊飯を行う場合における動作の例を示す。
【0028】
まず、実施例1と同様に調理鍋の重量を鍋重量記憶手段9に記憶させる。鍋重量を検知し、先に検知した空の状態の鍋重量とから炊き上げ目標重量を決定し、鍋重量記憶手段9に記憶する。
【0029】
次に、最初の炊き上げ工程に入る。実施例1は通常炊飯であったが、本実施例では、米への浸水は終了しており、その後短時間で炊き上げる場合の調理として加熱制御を行う。炊き上げ工程の目標温度は、100℃であるので、温度検知手段4による結果が5分以内に100℃に到達するように制御手段11は入力値を制御する。炊き上げ工程終了後、沸騰維持工程に入ってから約10分後に炊き上げ目標鍋重量に達するように計時手段10および制御手段11によって通電を制御する。
【0030】
本実施例においても、沸騰維持工程に入ってからは、定期的に鍋重量を検知する目的でインバータ回路5が加熱コイル3へ高周波電流を供給し、出力検知手段6が出力値を検知する。出力検知手段6の検知結果より浮力検知手段7が浮力を検知し、前記浮力手段7の検知結果から鍋重量検知手段8が鍋重量を検知する。前記鍋重量検知手段8の検知結果が鍋重量記憶手段9に記憶されている炊き上がり目標重量に達すると、制御手段11に伝え、出力値を小さくし、最終工程の蒸らし工程に入る。
【0031】
本実施例では、白米1合を450gのアルミニウム製の調理鍋で炊飯した場合の例を示す。まず、調理鍋を空の状態で本体に載せ、通電し、鍋重量を鍋重量記憶手段9に記憶させる。次に白米1合150g、水220gを調理鍋に入れ、炊飯を開始する。空の状態と同様に鍋重量検知手段8によって鍋重量を検知し先に検知した鍋のみの重量から、調理物の重量を検知し、本実施例の場合、炊き上げ目標鍋重量は次のように計算する。炊きあがりのご飯の重量を米の重量の2.3倍とすると
150×2.3+450(鍋重量)=795g
となる。
【0032】
目標炊き上げ重量決定後、炊飯工程に入る。最初の工程である炊き上げ工程における入力値は、本実施例では1000Wとする。次の沸騰維持工程では、炊き上げ目標重量になるまで、約10分間沸騰を維持できるように、制御手段11は通電を制御する。沸騰維持工程においては、30秒間おきに鍋重量を検知するためにインバータ回路5が加熱コイル3へ高周波電流を供給し、出力検知手段6が出力値を検知する。出力検知手段6の検知結果より浮力検知手段7が浮力を検知し、前記浮力手段7の検知結果から鍋重量検知手段8が鍋重量を795gと検知後、沸騰維持工程を終了し、蒸らし工程に入る。蒸らし工程では出力値を300Wの8秒オン8秒オフを繰り返し、8分経過した後、調理が終了する。
【0033】
(実施例3)
本実施例における誘導過熱調理器は、実施例1または2において実際に炊飯が行われる場合、温度検知手段4によって、調理開始前の初期温度を検知し、初期温度が10℃以下である場合、制御手段11が各工程における出力値をあげることによって、調理条件が悪い場合でも加熱が適切に行われるようにしたものである。
【0034】
(実施例4)
本実施例における誘導加熱調理器は、実施例1または2において実際に炊飯が行われる場合、炊きあがりのご飯の米に対する重量比を(表1)のように変更させて炊飯を行うように制御手段11によって制御することにより、調理者の好みの硬さに仕上げることができる。(表1)は米の硬さと炊きあがりご飯の濃めに対する重量比の関係を表したものである。本実施例では、図6に示すように、調理物の硬さを選択する第2の選択手段13によって、選択した硬さを鍋重量検知手段8に伝えることによって、炊き上げ目標重量を判断する。
【0035】
さらに、前回の選択した炊き上がりの硬さを記憶する第2の記憶手段14によって、前回選択した硬さを記憶し、調理者が硬さを選択しない場合には前回と同様の硬さに仕上げるようにする。また、炊き上がったご飯をさらに調理する場合、例えばおにぎりや炒飯を作りたい場合は硬めに炊くなどといった用途に応じて目的の硬さに仕上げることができる。
【0036】
【表1】

(実施例5)
本実施例における誘導加熱調理器は、最初に鍋重量検知手段8によって合数を判断するため、およその全調理時間を推定し、図7における表示手段15によって調理残時間を表示する。
【0038】
本実施例では、白米を炊飯する場合の例を示す。(表2)は合数の違いによるおよその調理時間を表したものである。鍋重量検知手段8により1合を炊飯すると判断した場合、表示手段15によって、図8aに示すように調理者に調理残時間を示す。炊き上げ目標重量に達した時間、沸騰に要した時間など初期水温等による多少の誤差は、最終工程の蒸らし工程に到達したときに、調節するものとする。調理開始直後は図8aに示すように「約」という表示があるが、蒸らし工程に到達したときに、図8bに示すように「約」という表示が消えるようにする。
【0039】
【表2】
(実施例6)
本実施例における誘導加熱調理器は、炊飯終了時刻を予め入力する手段16によって、炊飯終了予定時刻を入力する手段を備え、所望時間後に調理物を得たいのかを、調理者が入力することによって入力した所望時間の後に調理が終了するようにしたものである。
【0041】
本実施例では、実施例5における(表2)を使用して、調理者が2時間後に1合の調理物を得たい場合の動作の説明を行う。調理者は図9に示す炊飯終了予定時刻を入力するタイマ入力手段16により3時間後に調理が終了するように入力する。入力方法の例は図10に示す、時間キー17と分キー18によって、入力するとする。入力した時間が表示部19に示される。
【0042】
次に、鍋重量検知手段8により1合であると判断するので、(表2)において1合のおよそ調理時間は40分であることがわかる。そのため、鍋重量検知後1時間20分、本実施例である誘導加熱調理器は、加熱を行わない。温度で負荷量を検知する目的のために加熱を行う必要が無いので、調理時間を合わせるために大きい合数に合わせて調理を開始せずにすむのである。大きい合数に合わせて調理を開始した場合、余分な保温時間が増えてしまうが、本実施例の場合は、炊き上げ目標重量に達した時間、沸騰に要した時間など初期水温等による多少の誤差ですむのである。調理時間が多少増減した場合は、最終工程の蒸らし工程で調節するものとする。
【0043】
なお、本実施例で用いた時間、温度、出力電力の値は例であって、他の値をとっても構わない。
【0044】
【発明の効果】
以上のように、重量を検知することができる重量検知手段を有することによって安定した炊きあがりの調理物を得ることがでる。また重量で合数を判定するために、温度上昇による合数判定よりも正確に合数を判定することができ、調理物に適した加熱を行うことができる。
【図面の簡単な説明】
【図1】本発明の実施例1における誘導加熱調理器に本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図
【図2】同誘導加熱調理器における入力電力と浮力の相関を示した図
【図3】本発明の実施例1における誘導加熱調理器の炊飯工程における目標温度と調理時間と入力電力の関係を示す特性図
【図4】本発明の実施例2における誘導加熱調理器に本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図
【図5】本発明の実施例2における誘導加熱調理器の炊飯工程における目標温度と調理時間と入力電力の関係を示す特性図
【図6】本発明の実施例4における誘導加熱調理器に本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図
【図7】本発明の実施例5における誘導加熱調理器に本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図
【図8】(a)本発明の実施例5における表示部を示す図
(b)本発明の実施例5におけるむらし行程での表示部を示す図
【図9】本発明の実施例6における誘導加熱調理器に本体にアルミニウム製の調理鍋を載置した時の断面と電気接続を示すブロック図
【図10】本発明の実施例6における表示操作部を示す図
【符号の説明】
1 トッププレート
2 鍋
3 加熱コイル
4 温度検知手段
17 時間キー
18 分キー
19 表示部[0001]
BACKGROUND OF THE INVENTION
The present invention relates to an induction heating cooker.
[0002]
[Prior art]
The induction heating cooker heats an object to be heated, such as a cooking pan, which is magnetically coupled to the heating coil by supplying a high-frequency current to the heating coil. Moreover, the temperature of a cooking pan is detected by providing a temperature detection means inside the plate through the heating coil and the object to be heated. The cooking pan serves to transmit the heat of the heat source directly to the cooked product, so that there is a difference in the quality of cooking depending on the heat receiving characteristics of the pan used.
[0003]
Conventionally, when cooking rice in an induction heating cooker, a high-resistance metal cooking pan such as stainless steel or iron has been used as an object to be heated. Metals such as stainless steel and iron have low thermal conductivity, and in an induction heating cooker that heats only the bottom surface, the temperature difference between the bottom surface and the side surface is large.
[0004]
[Patent Document 1]
Japanese Patent Application Laid-Open No. 07-222677
[Problems to be solved by the invention]
However, due to the feature of the induction heating cooker that heats only the bottom of the pan, it is difficult to control the heating, and in the heating control only by the temperature detection means, the bottom surface is burnt depending on the load amount, but the top surface is watery finish After all, the cooking was uneven.
[0006]
An object of this invention is to provide the induction heating cooking appliance which can provide the rice cooked stably by having the detection means which detects a weight. Moreover, since the cooking pot of low resistance metals, such as aluminum with high heat conductivity, can be used, even if it is an induction heating cooker which heats only a bottom face, it is easy to transmit heat to a side surface and can cook rice without cooking unevenness.
[0007]
[Means for Solving the Problems]
In order to solve the conventional problem, a buoyancy detection means for detecting a buoyancy that a magnetic field generated by the heating coil acts on an object to be heated of a low resistance metal such as aluminum and a heating detection means for detecting heating are used. A pan weight detecting means for detecting the weight and a temperature detecting means for detecting the temperature of the object to be heated, and a stable finish according to the detection result of the pot weight detecting means and the detection of the temperature detecting means. It has a rice cooking mode that can be provided.
[0008]
DETAILED DESCRIPTION OF THE INVENTION
The invention according to
[0009]
Invention of
[0010]
Invention of
[0011]
Invention of
[0012]
Invention of
[0013]
Invention of
[0014]
The invention according to
[0015]
【Example】
Embodiments of the present invention will be described below with reference to the drawings.
[0016]
(Example 1)
FIG. 1 is a block diagram showing a cross section and electrical connection when an aluminum cooking pan is placed on the main body.
[0017]
In FIG. 1, 1 is a top plate of the induction heating cooker body, 2 is a cooking pan, 3 is a heating coil, 4 is a sensor for detecting the temperature of an object to be heated, and is provided on the back surface at the substantially center of the
[0018]
In FIG. 2, the horizontal axis indicates the input power to the
[0019]
The operation in this embodiment will be described below.
[0020]
First, the cooking pan is energized and energized, the pan
[0021]
In this embodiment, a rice cooking process as shown in FIG. 3 is performed. Before entering the rice cooking process, the pan weight is detected, and the target cooking pan weight is determined from the previously detected empty pan weight and stored in the pan weight storage means 9. Next, the first pre-cooking process is entered. The target temperature of the pre-cooking process is about 60 ° C. At this time, by allowing the rice to absorb water with hot water at about 60 ° C., the rice starch can swell, and the rice can sufficiently absorb the water necessary for pre-gelatinization to the center. it can.
[0022]
In addition, the activity of amylase increases, starch is easily decomposed, and sweetness increases. Next, the output power is determined by the time measuring means 10 and the control means 11 so that the results of the weight detection means 8r and the temperature detection means 4 become 60 ° C. after about 3 minutes. Thereafter, the energization is controlled by the time measuring means 10 and the control means 11 so that the result of the
[0023]
In a present Example, the example at the time of cooking
It becomes.
[0024]
After the target cooking weight is determined, the rice cooking process is started. In the present embodiment, the precooking of the first step is 2 in this case. Therefore, 600 W is output, and when the result of the
[0025]
In this embodiment, the input value in the cooking process is 1000 W. After the completion of the cooking process, in the boiling maintenance process, the control means 11 controls energization so that the boiling can be maintained for about 15 minutes until the cooking target weight is reached. The
[0026]
(Example 2)
FIG. 4 is a block diagram showing a cross section and electrical connection when an aluminum cooking pan is placed on the main body in the present embodiment, which is basically the same as that of the first embodiment, and the cooking course selection means 12 is shown in FIG. Only has been added. The cooking course selection means 12 makes it possible to select cooking courses such as a porridge course, a brown rice course, and a high-speed rice cooking course, and a cooking program corresponding to each cooking course is performed by the control means 11.
[0027]
In a present Example, the example of operation | movement in the case of performing high-speed rice cooking as shown in FIG. 5 in rice cooking mode is shown.
[0028]
First, as in the first embodiment, the weight of the cooking pan is stored in the pan weight storage means 9. The pot weight is detected, the target cooking weight is determined from the previously detected empty pot weight, and stored in the pot weight storage means 9.
[0029]
Next, the first cooking process is started. Although Example 1 was normal rice cooking, in this example, the water immersion to the rice is complete | finished, and heating control is performed as cooking when cooking after a short time. Since the target temperature of the cooking process is 100 ° C., the control means 11 controls the input value so that the result of the temperature detection means 4
[0030]
Also in this embodiment, after entering the boiling maintenance step, the
[0031]
In a present Example, the example at the time of cooking
It becomes.
[0032]
After the target cooking weight is determined, the rice cooking process is started. The input value in the cooking process, which is the first process, is 1000 W in this embodiment. In the next boiling maintenance step, the control means 11 controls energization so that boiling can be maintained for about 10 minutes until the cooked target weight is reached. In the boiling maintenance step, the
[0033]
(Example 3)
In the induction overheating cooker in the present embodiment, when cooking rice is actually performed in the
[0034]
(Example 4)
The induction heating cooker in the present embodiment is a control means for performing rice cooking by changing the weight ratio of cooked rice to rice as shown in (Table 1) when rice is actually cooked in Example 1 or 2. By controlling by 11, it is possible to finish the cooker's favorite hardness. Table 1 shows the relationship between the hardness of rice and the weight ratio of the cooked rice. In the present embodiment, as shown in FIG. 6, the cooked target weight is determined by transmitting the selected hardness to the pan
[0035]
Further, the second storage means 14 for storing the last selected hardness is stored with the last selected hardness, and when the cooker does not select the hardness, the same hardness as the previous is finished. Like that. Moreover, when cooking the cooked rice further, for example, when making a rice ball or fried rice, it can be finished to the target hardness according to uses, such as cooking harder.
[0036]
[Table 1]
(Example 5)
In the induction heating cooker in this embodiment, the total number of cooking times is estimated by the pan weight detection means 8 first, so that the approximate total cooking time is estimated and the remaining cooking time is displayed by the display means 15 in FIG.
[0038]
In a present Example, the example in the case of cooking white rice is shown. Table 2 shows the approximate cooking time depending on the total number. When it is determined by the pot weight detection means 8 that one meal is to be cooked, the display means 15 indicates the cooking remaining time to the cooker as shown in FIG. Some errors due to the initial water temperature, such as the time to reach the cooked target weight and the time required for boiling, are adjusted when the final steaming process is reached. Immediately after the start of cooking, there is a display of “about” as shown in FIG. 8a, but when the steaming process is reached, the display of “about” disappears as shown in FIG. 8b.
[0039]
[Table 2]
(Example 6)
The induction heating cooker in the present embodiment includes means for inputting the scheduled rice cooking end time by means 16 for inputting the rice cooking end time in advance, and the cook inputs whether he wants to obtain the cooked food after a desired time. Cooking is completed after the input desired time.
[0041]
In the present embodiment, the operation in the case where the cook wants to obtain one cooked food after 2 hours will be described using Table 2 in
[0042]
Next, since it is determined by the pan
[0043]
Note that the values of time, temperature, and output power used in this embodiment are examples, and other values may be taken.
[0044]
【The invention's effect】
As described above, a stable cooked food can be obtained by having the weight detecting means capable of detecting the weight. Moreover, in order to determine the total number by weight, the total number can be determined more accurately than the total number determination due to temperature rise, and heating suitable for cooking can be performed.
[Brief description of the drawings]
FIG. 1 is a block diagram showing a cross section and electrical connection when an aluminum cooking pan is placed on the main body of an induction heating cooker in
1
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002268558A JP3636185B2 (en) | 2002-09-13 | 2002-09-13 | Induction heating cooker |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002268558A JP3636185B2 (en) | 2002-09-13 | 2002-09-13 | Induction heating cooker |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004105274A JP2004105274A (en) | 2004-04-08 |
| JP3636185B2 true JP3636185B2 (en) | 2005-04-06 |
Family
ID=32266747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002268558A Expired - Fee Related JP3636185B2 (en) | 2002-09-13 | 2002-09-13 | Induction heating cooker |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3636185B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6267988B2 (en) * | 2014-02-14 | 2018-01-24 | シャープ株式会社 | Cooker |
| CN104697615A (en) * | 2015-03-26 | 2015-06-10 | 广东美的厨房电器制造有限公司 | Method and device for detecting food quantity |
| GB2552972B (en) * | 2016-08-16 | 2020-01-15 | Richards Morphy N I Ltd | Induction cooking method and apparatus |
| CN107440480B (en) * | 2017-09-04 | 2022-09-16 | 浙江爱仕达生活电器有限公司 | Split type automatic water-adding electric cooker |
| IT201800009919A1 (en) * | 2018-10-30 | 2020-04-30 | La Marzocco Srl | Active water monitoring and filtration system for an espresso coffee machine and its espresso coffee machine |
| KR200494322Y1 (en) * | 2020-02-25 | 2021-09-15 | 주식회사 한국클래드텍 | Induction range |
-
2002
- 2002-09-13 JP JP2002268558A patent/JP3636185B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004105274A (en) | 2004-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5775885B2 (en) | Electric heating pan with weight measuring function and weight measuring method thereof | |
| JP3968311B2 (en) | Induction heating cooker | |
| CN107251646B (en) | Kitchen range | |
| CN108158383A (en) | The control method of cooking apparatus | |
| JP5089490B2 (en) | Induction heating cooker | |
| JP3636185B2 (en) | Induction heating cooker | |
| JP7300648B2 (en) | heating cooker | |
| JP5863452B2 (en) | Induction heating cooker | |
| JP2006343006A (en) | Heating cooker | |
| JP2019200002A (en) | Cooking device | |
| JP5262944B2 (en) | Induction heating cooker | |
| JP2004349098A (en) | Induction heating cooker | |
| KR101917798B1 (en) | Electric rice cooker having function for determining amount of cooked rice and method for determining amount of cooked rice | |
| JP5945800B2 (en) | Cooker | |
| KR100746393B1 (en) | Cooking control apparatus and its method for electric pressure heat insulating rice cooker | |
| JP2008259550A (en) | Cooker | |
| JP2012094259A (en) | Induction heating cooker | |
| JP4009507B2 (en) | rice cooker | |
| JPH064850Y2 (en) | rice cooker | |
| JP2006129912A (en) | Rice cooker | |
| JP7496508B2 (en) | Induction Cooker | |
| JP3826894B2 (en) | Cooker | |
| CN109696843B (en) | Cooking appliance countdown display control method and device and cooking appliance | |
| JP5195078B2 (en) | Induction heating cooker | |
| KR101127389B1 (en) | Control method of an electric rice cooker |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041214 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041227 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080114 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090114 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090114 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100114 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110114 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110114 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120114 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130114 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130114 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |