JP3632060B2 - モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム - Google Patents
モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム Download PDFInfo
- Publication number
- JP3632060B2 JP3632060B2 JP2003034168A JP2003034168A JP3632060B2 JP 3632060 B2 JP3632060 B2 JP 3632060B2 JP 2003034168 A JP2003034168 A JP 2003034168A JP 2003034168 A JP2003034168 A JP 2003034168A JP 3632060 B2 JP3632060 B2 JP 3632060B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- control device
- magnetic pole
- motor
- motor roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Landscapes
- Rollers For Roller Conveyors For Transfer (AREA)
- Brushless Motors (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
【発明の属する技術分野】
本発明は、ブラシレスモータをローラに内蔵したモータローラを制御するモータローラ制御装置、並びに、コンベアシステムに関する。
【0002】
【従来の技術】
図5は、従来のモータローラ制御装置の制御ブロック回路図である。このモータローラ制御装置は、制御部51と電流切替部52と磁極検出部53とを備えて成る。ブラシレスモータ54は、一般に、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子とを備えている。この磁極位置検出子としては、ホール素子、検出された微小信号を増幅する増幅器、信号を方形波に整形するシュミットトリガ回路、安定化電源回路及び温度補償回路をワンパッケージ化したホールICが広く用いられている。
【0003】
制御部51は、シーケンサーや管理コンピュータなどからなる上位制御システムからの制御信号を入力し、所定の処理を行い、この処理信号を電流切替部52に供給する。上位制御システムからの制御信号には、ブラシレスモータ54の回転/停止信号や、速度信号、正転/逆転信号などがある。
また、磁極検出部53は前記ホール素子から、回転子の磁極の位置(回転状態)に関する信号(磁極検出信号)を入力し、パルス波形処理などを行い、この処理信号を電流切替部52に供給する。
【0004】
電流切替部52は、制御部51及び磁極検出部53から得た処理信号に基づいて、各固定子への電流を制御してブラシレスモータ54の回転を実現する。即ち、制御部51及び磁極検出部53からの信号に基づいて、電流切替部52は、各固定子への給電ON/OFF、供給電流の調整などの制御を行う。
【0005】
上記ブラシレスモータは、例えば、ローラコンベアの駆動手段として用いられている。特に、本願出願人は、特開平10−279047号公報にも開示されているように、ブラシレスモータを内蔵する駆動ローラを用いたコンベアシステムの開発に取り組んでいる。
この種のコンベヤシステムでは、一般に、多くのブラシレスモータが必要となる。当然、各ブラシレスモータ毎に、上記モータローラ制御装置が必要となる。そして、被搬送物の搬送を適切に行うために、上位制御システムから各制御装置に対して制御信号を供給する。
【0006】
【発明が解決しようとする課題】
ところで、コンベヤシステムの制御内容を高機能化させたり、制御の正確性の向上を図るための一つの手段として、各モータローラ制御装置(モータ駆動装置)の高機能化を図ることが考えられる。例えば、各モータローラ制御装置に、マイクロコンピュータや、複雑な論理回路を内蔵させることにより、コンベヤシステム全体の高機能化を図ることができる。
【0007】
しかし、上記したように、コンベヤシステムには多くのブラシレスモータが用いられ、各モータの制御装置を高機能化することは、システム全体の大幅なコスト増となる。
本発明は、複数のブラシレスモータの制御の高機能化、高精度化を、低コストで図ることができるモータローラ制御装置、並びに、コンベアシステムを提供することを目的とする。
【0008】
【課題を解決するための手段】
この発明のモータローラ制御装置は、回転子位置に関する信号に基づいて固定子への電流切替を行うモータローラ制御装置において、回転子位置に関する信号をパルス波形に変換して外部に取り出せるように構成したことを特徴とする。
即ち請求項1に記載の発明は、ブラシレスモータをローラに内蔵したモータローラを制御し、内蔵されるブラシレスモータの回転子位置に関する信号に基づいて固定子への電流切替を行うモータローラ制御装置において、基本的な或いは共通的な部品に相当するものとして設計され、モータローラに内蔵されるブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子を備えるものであり、モータローラ制御装置は、上位制御システムからの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部とを有し、ブラシレスモータの給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記磁極位置検出子の出力信号線に接続され、回転子位置に関する信号、又は、該信号に基づいて生成された回転子の回転数を表すパルス信号を、前記出力信号線から当該モータローラ制御装置の外部に取り出すための回転数信号出力端子とを備えることを特徴とするモータローラ制御装置である。
【0009】
上記の構成においては、回転子位置に関する信号をパルス波形に変換して外部に取り出せるようにしたから、ブラシレスモータにロータリエンコーダやタコメータなどを設けなくても、上位の制御系はモータローラ制御装置からブラシレスモータの回転数に関する情報を得て様々な制御を行うことができ、システム全体のコスト負担を低減しながらも、各モータローラ制御装置を的確に制御することができる。また、高度な制御を担う部分(上位の制御系)を分離してモータローラ制御装置を低価格で供給することを図りながら、要求されるシステム構築に際して、高度な制御を担う部分に対してモータローラ制御装置から各モータの回転情報を直ちに与えることが可能であり、システム構築の自由度或いは迅速度を高めることができる。
【0010】
また、本発明のコンベアシステムは、シーケンサや管理コンピュータなどの集中制御装置を備えるとともに、被搬送物を搬送する複数のローラを有するローラコンベアユニットを複数配設してなるコンベアシステムであって、各ユニットは、少なくとも一つのローラを回転駆動するブラシレスモータと、該モータの駆動を制御するモータローラ制御装置とを備え、該モータローラ制御装置は、回転子位置に関する信号に基づいて固定子への電流切替を行うように構成されたものとし、上記回転子位置に関する信号をパルス波形に変換して外部に取り出せるように構成したものである。なお、本発明は、ブラシレスモータをローラに内蔵したモータローラを用いたコンベアシステムに適用可能である。
【0011】
かかるコンベアシステムによれば、各モータローラ制御装置の回路構成を可及的に簡略化しつつも、各ブラシレスモータの回転数を外部に取り出せるようにしているので、この回転数信号に基づいてユーザーが望む任意の制御を行うことが可能である。例えば、回転数信号を集中制御装置に供給し、所望の演算処理を行って、集中制御装置からの上位制御信号を生成することが可能である。また、集中制御装置とモータローラ制御装置との間にフィードバック制御ボックスやマスター制御ボックスなどの適宜の中間装置を設け、該中間装置に集中制御装置からの上位制御信号と各モータローラ制御装置の回転数信号を供給し、これら信号に基づいて各モータローラ制御装置へ供給する下位制御信号を生成するように構成することもできる。その他、本発明によれば、ユーザーが望む形態のシステム構成を任意に設計することが可能となる。
【0012】
【発明の実施の形態】
本発明のモータローラ制御装置は、回転子位置に関する信号に基づいて固定子への電流切替を行うモータローラ制御装置において、前記回転子位置に関する信号、又は、該信号に基づいて生成された回転子の回転数を表すパルス信号を外部に取り出すための回転数信号出力端子を設けたものである。この端子は、回路基板に直接取付けたものであってもよく、回路基板から引き出し線を介して設けたものであってもよい。
【0013】
回転子位置に関する信号としては、磁極位置検出子の出力信号を用いることができる。磁極位置検出子としては、ホールICなどの従来公知の適宜の素子を用いることが可能である。通常、ブラシレスモータには、複数の磁極位置検出子が設けられ、各検出子は、回転子の周期に同期したパルス信号を出力し、各検出子が出力するパルス信号は所定の位相差を有する。したがって、複数の磁極検出子のうちの一つの出力信号のみを選択的に取り出すことで、回転子位置に関する信号に基づいて生成された回転子の回転数を表すパルス信号が得られる。
【0014】
より具体的な本発明の実施の形態に係るモータローラ制御装置は、次のように構成できる。即ち、モータローラに内蔵されるブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子を備えるものであり、モータローラ制御装置は、上位制御システムからの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部を有し、前記制御部はブラシレスモータの給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記複数の磁極位置検出子のうちの一つの出力信号線に接続された回転数信号出力端子とを備えるものとすることができる。制御回路部、磁極検出回路部及び電流切替回路部は、従来公知の適宜の回路構成とすることができ、また、当業者が適宜設計することができる。好ましくは、上記回転数信号出力端子と上記出力信号線との間に増幅器を設けることができる。
【0015】
また、本発明のコンベアシステムは、集中制御装置を備えるとともに、被搬送物を搬送する複数のローラを有するローラコンベアユニットを複数配設してなるコンベアシステムであって、各ユニットは、少なくとも一つのローラを回転駆動するブラシレスモータと、該モータの駆動を制御するモータローラ制御装置とを備え、前記ブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子とを備えるものであり、前記モータローラ制御装置は、集中制御装置からの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部と、前記複数の磁極位置検出子のうちの一つの出力信号線に接続された回転数信号出力端子とを備えるものであり、各モータローラ制御装置の回転数信号出力端子からの出力信号が集中制御装置に供給されるように配線されているものとすることができる。
【0016】
また、本発明のコンベアシステムは、集中制御装置を備えるとともに、被搬送物を搬送する複数のローラを有するローラコンベアユニットを複数配設してなるコンベアシステムであって、各ユニットは、少なくとも一つのローラを回転駆動するブラシレスモータと、該モータの駆動を制御するモータローラ制御装置とを備え、前記ブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子とを備えるものであり、前記モータローラ制御装置は、集中制御装置からの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部を有し、前記制御部はモータの給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記複数の磁極位置検出子のうちの一つの出力信号線に接続された回転数信号出力端子とを備えるものであり、各モータローラ制御装置の回転数信号出力端子からの出力信号が集中制御装置に供給されるように配線されているものとすることができる。
【0017】
このコンベアシステムにおいて、更に、各モータローラ制御装置の回転数信号出力端子からの出力信号又は該信号に所定の処理を行った処理信号を集中制御装置に供給するように配線することができる。かかる配線形態は、直列的接続、並列的接続のいずれであってもよく、好ましくは、ライン上の複数のモータローラ制御装置を、従来公知の手法によってネットワーク接続することができる。
【0018】
また、各モータローラ制御装置の回転数信号出力端子からの出力信号に基づいて各モータローラ制御装置の制御部に供給する信号をフィードバック制御することができる。かかるフィードバック制御は、集中制御装置とモータローラ制御装置の間に設けた中間制御装置によって行ってもよいし、集中制御装置自体により行うこともできる。
【0019】
【実施例】
以下、本発明の実施例を図1乃至図4を参照しながら説明する。図1はこの発明のモータローラ制御装置が取り付けられたコンベア装置の斜視図であり、図2はモータローラ制御装置のブロック回路図であり、図3は複数連結したコンベア装置の斜視図であり、図4は複数連結したコンベア装置間の電気的接続関係を示したブロック図である。
【0020】
この実施例のモータローラ制御装置(ブラシレスモータ駆動装置)は、ブラシレスモータ内蔵のモータローラを制御する。このモータローラはコンベア装置に設けられ、被搬送物を強制的に搬送する。
【0021】
図1に示すように、コンベア装置1(コンベアユニット)は、平行に配置された一対のサイドレール2,2間に、被搬送物を搬送する複数のローラ3,4を梯子状に支持して成る。ローラ3は自由に回転するアイドルローラであり、ローラ4はモータローラである。モータローラ4は、そのシャフトの両端をサイドレール2,2に固定し、シャフトの両端に設けたベアリングを介してローラとなる筒体を回転自在に支持し、前記シャフトに複数の固定子(電磁石)を設け、この固定子に対向して回転子を筒体の内面に設けて構成される。回転子には円形磁石が設けられており、固定子側に設けたホール素子が回転子の磁極の位置(回転状態)に関する信号(磁極検出信号)を出力する。コード10は、前記磁極検出信号を取り出す線および固定子への給電を行う線を含むものであり、シャフトに形成した孔に挿通されてシャフト端から取り出されている。
【0022】
前記モータローラ4はコンベア装置1の中央部に一つ設けられ、他はアイドルローラ3である。所定のアイドルローラ3には、被搬送物検出センサ5が内蔵してある。モータローラ4やアイドルローラ3の配置個数や配置箇所は例示であって上記のものに限定されることはなく、また、被搬送物検出センサ5はモータローラ4に内蔵されていてもよい。被搬送物検出センサ5は、例えばその筒体の外周に設けた接触センサー等から成る。この被搬送物検出センサのリード線13は、シャフトに形成した孔に挿通されてシャフト端から取り出されている。
【0023】
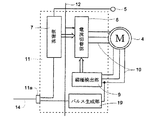
モータローラ制御装置11には、主幹給電線(例えば、DC24V)12、コード10、およびリード線13が接続されており、またモータローラ制御装置11の伝送線装着端子部11aには、伝送線14が接続されている。モータローラ制御装置11は、図2に示すように、制御部7と電流切替部8と磁極検出部9とパルス生成部19とを備えて成る。磁極検出部9はモータローラ4のシャフトに取り付けた前記ホール素子から、回転子の位置(回転状態)に関する信号(磁極検出信号)を入力し、パルス波形処理などを行い、この処理信号を電流切替部8に供給する。電流切替部8は、磁極検出部9から得た処理信号に基づいて固定子への電流を制御してモータローラ4の回転を実現する。制御部7はモータローラ4の給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部8を通じて行う。
【0024】
パルス生成部19は例えば増幅器を備えて構成され、前記ホール素子から、回転子の位置(回転状態)に関する信号(磁極検出信号)を入力してパルス波形出力信号を生成し、このパルス波形信号を外部出力端子11aに出力する。外部出力端子11aには伝送線14が接続され、この伝送線14は後述するシーケンサ部20に接続されている。シーケンサ部20(上位制御システム)は、モータローラ4の回転状態を検出して何らかの制御を行うものであり、モータローラ制御装置11からみて上位の制御系として位置づけられる。この上位の制御系であるシーケンサ部20は、各モータローラ4にロータリエンコーダやタコメータなどを設けることなしにモータローラ制御装置11からモータローラ4の回転に関する信号を得ていることになる。
【0025】
図3に示すように、複数のコンベア装置1を連結して搬送ラインとすることができる。図4は複数のコンベア装置1の電気的接続関係を示している。集中制御装置としてのシーケンサ部20とモータローラ制御装置11の制御部7は伝送線14によって情報伝達を行うことができる。シーケンサ部20は、予め定められた制御内容に基づいて、各制御部7に対して、回転/停止(RUN/STOP)指令、正転/逆転(CW/CCW)指令、或いは速度指令などを出す。例えば、シーケンサ部20が正転指令を出すと、各コンベア装置1のモータローラ4が正転して搬送ラインとしては被搬送物の順方向搬送を行うことになり、速度指令を出すと、各コンベア装置1のモータローラ4が指定された速度で回転して搬送ラインとしては被搬送物を指定された速度で搬送することになる。
【0026】
また、シーケンサ部20は各コンベア装置1のモータローラ4の回転に関するパルス波形信号を伝送線14を通じて入力し、このパルス波形信号に基づいて情報処理を行い、この処理結果に基づく各種制御を行うことが可能である。例えば、各コンベア装置1のモータローラ4間で速度差があるか否かを判断し、速度差を無くすように速度指令を出す制御、或いは回転指令を出しているのにパルス波形信号が得られない場合の故障判断制御などが行える。
【0027】
更に、シーケンサ部20は各コンベア装置1の被搬送物検出センサ5から被搬送物を検出したことを示す信号を伝送線14を通じて得ることで、以下のような制御を行うことが可能である。例えば、コンベア装置1の被搬送物検出センサ5から被搬送物を検出したことを示す信号を得たタイミングで、そのモータローラ制御装置11のパルス生成部19からのパルスのカウントを開始し、所定数カウントした時点で、そのコンベア装置1に停止指令を出すといった制御を行うことができる。コンベア装置1の被搬送物検出センサ5から被搬送物を検出したことを示す信号を得た時点で直ちに停止指令を出すだけでは、そのセンサ5に対応する位置のみでしか被搬送物を停止させられないが、このような制御を行うことにより、センサ5に対応する位置から所望の距離経た任意の位置で被搬送物を停止させることができる。即ち、被搬送物の位置決めの自由度が高まり、また、被搬送物の停止位置に変更が生じた場合でも、ユーザー側で上記カウント数を変更することにより、容易に対処することができる。
【0028】
また、たとえ上記の被搬送物検出センサ5を設けなくても、回転開始指令を出した時点からパルス生成部19からのパルス数を監視することで、被搬送物の移動距離、即ち、被搬送物の位置を判断することも可能である。
【0029】
更に、被搬送物の搬送を停止させる場合において、その慣性の影響或いはモータローラ4自体の慣性でモータローラ4が少し回転して停止したとすると、所望の位置からずれて被搬送物が停止することになる。このように所望の位置からずれて停止する場合を考慮した制御として、以下の制御が考えられる。即ち、コンベア装置1に対して停止指令を出したタイミングで、そのモータローラ制御装置11のパルス生成部19からのパルスのカウントを開始し、幾つカウントされたかを検出する。カウント値に対応する距離だけ被搬送物が所望の位置からずれて停止したと判断できるので、この判断に基づいて、図示しない機械(被搬送物の検査装置、加工機械、移載装置等)にその情報を与えたり、或いは、コンベア装置1側でモータローラ4を少し回転させて被搬送物の位置を調整させるといったことが可能となる。なお、慣性によるモータローラ4の不所望な回転を低減するために、発電ブレーキ回路を設ける構成を採用してもよい。
【0030】
以上説明したように、モータローラ制御装置11は、回転子位置に関する信号をパルス波形に変換して外部に取り出せるように構成したから、モータローラ4にロータリエンコーダやタコメータなどを設けなくても、他の制御系であるシーケンサ部20はモータローラ制御装置11からモータローラ4の回転数に関する情報を得て様々な制御を行うことができ、他の制御系を設ける際のコスト負担を低減することができる。
【0031】
さらに、シーケンサ部20からの速度指令に対して、パルス信号の時間的な演算を行うことにより、被搬送物の負荷の大きさ(重量)を知ることができる。これを利用して、例えば、分岐ラインなどにおいて被搬送物の重量により行き先を分岐させる事も可能になるという有利な効果を奏することができる。
【0032】
また、モータローラ4が停止しているときに被搬送物がコンベア装置1上に入ってくると、この被搬送物によりローラ4が回転させられ、これによりパルス信号が発生するため、被搬送物が入ってきたことを検知することが可能となる。
【0033】
また、モータローラ制御装置11については、これを基本的な或いは共通的な部品に相当するもの(常に必要とされるものでない制御機構部分を無くしたもので汎用的なもの)として量産可能で低価格でユーザーに提供できるよう設計でき、ユーザー側では、モータローラ制御装置11の外部出力端子11aからモータローラ4の回転子の位置に関するパルス波形信号を得て、自在にシステムを構築することができる。別言すれば、高度な制御を担う部分(他の制御系)を分離してモータローラ制御装置11を低価格で供給することを図りながら、要求されるシステム構築に際して、高度な制御を担う部分(他の制御系)にモータローラ制御装置11がその回転情報を直ちに与えることができ、システム構築の自由度或いは迅速度を高めることができる。
【0034】
なお、上記実施形態では、被搬送物検出センサをローラに内蔵したが、サイドフレーム2に光センサなどを設けてこれを被搬送物検出センサとする構成でもよい。また、ブラシレスモータをローラに内蔵したモータローラを用いたが、外部に設けたブラシレスモータに連結されて回転するローラとしてもよいものである。また、コンベア装置に用いられる以外のブラシレスモータを制御するモータローラ制御装置としてもよいものである。また、ホール素子にて回転子の位置情報を得る磁気方式を用いたが、光方式等を用いてもよい。
【0035】
【発明の効果】
以上説明したように、この発明によれば、回転子位置に関する信号をパルス波形に変換して外部に取り出せるように構成したので、ブラシレスモータにロータリエンコーダやタコメータなどを設けなくても、他の制御系はモータローラ制御装置からブラシレスモータの回転数に関する情報を得て様々な制御を行うことができ、他の制御系のコスト負担を低減することができる。また、高度な制御を担う部分(上位の制御系)を分離してモータローラ制御装置を低価格で供給することを図りながら、要求されるシステム構築に際して、高度な制御を担う部分にモータローラ制御装置がその回転情報を直ちに与えることが可能であり、システム構築の自由度或いは迅速度を高めることができる。
【図面の簡単な説明】
【図1】この発明のモータローラ制御装置が取り付けられたコンベア装置の斜視図である。
【図2】この発明の実施形態のモータローラ制御装置のブロック回路図である。
【図3】複数連結したコンベア装置の斜視図である。
【図4】複数連結したコンベア装置間の電気的接続関係を示したブロック図である。
【図5】従来のモータローラ制御装置のブロック回路図である。
【符号の説明】
1 コンベア装置
2 サイドレール
3 アイドルローラ
4 モータローラ
7 制御(回路)部
8 電流切替(回路)部
9 磁極検出(回路)部
10 コード
11 モータローラ制御装置
11a 出力端子
19 パルス生成部
20 上位制御システム(集中制御装置)
Claims (7)
- ブラシレスモータをローラに内蔵したモータローラを制御し、内蔵されるブラシレスモータの回転子位置に関する信号に基づいて固定子への電流切替を行うモータローラ制御装置において、基本的な或いは共通的な部品に相当するものとして設計され、モータローラに内蔵されるブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子を備えるものであり、モータローラ制御装置は、上位制御システムからの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部とを有し、ブラシレスモータの給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記磁極位置検出子の出力信号線に接続され、回転子位置に関する信号、又は、該信号に基づいて生成された回転子の回転数を表すパルス信号を、前記出力信号線から当該モータローラ制御装置の外部に取り出すための回転数信号出力端子とを備えることを特徴とするモータローラ制御装置。
- 回転数信号出力端子と出力信号線との間に増幅器を設けたことを特徴とする請求項1に記載のモータローラ制御装置。
- 電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子とを備えるブラシレスモータの駆動装置であって、上位制御システムからの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部を有し、モータの給電ON/OFF(回転,停止)供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記磁極位置検出子の出力信号線に接続され、回転子位置に関する信号、又は、該信号に基づいて生成された回転子の回転数を表すパルス信号を、前記出力信号線から当該ブラシレスモータの駆動装置の外部に取り出すための回転数信号出力端子とを備えることを特徴とするブラシレスモータ駆動装置。
- 集中制御装置を備えるとともに、被搬送物を搬送する複数のローラを有するローラコンベアユニットを複数配設してなるコンベアシステムであって、各ユニットは、ブラシレスモータをローラに内蔵したモータローラと、当該モータローラを制御するモータローラ制御装置を備え、前記ブラシレスモータは、電磁石からなる複数の固定子と、磁極回転子と、該回転子の磁極の周方向位置を検知する複数の磁極位置検出子とを備えるものであり、前記モータローラ制御装置は、集中制御装置からの制御信号を入力して所定の処理を行う制御回路部と、前記磁極位置検出子の出力信号を処理する磁極検出回路部と、前記制御回路部並びに磁極検出回路部から与えられる信号に基づいて各固定子に順次電流を供給する電流切替回路部を有し、ブラシレスモータの給電ON/OFF(回転,停止)、供給電流の調整(正転/逆転,速度調整)などの制御を電流切替部を通じて行い、さらに前記磁極位置検出子の出力信号線に接続され、回転子位置に関する信号、又は、該信号に基づいて生成された回転子の回転数を表すパルス信号を、前記出力信号線から当該モータローラ制御装置の外部に取り出すための回転数信号出力端子とを備えるものであり、各モータローラ制御装置の回転数信号出力端子からの出力信号が集中制御装置に供給されるように配線されていることを特徴とするコンベアシステム。
- 集中制御装置とモータローラ制御装置との間に中間装置を設けたことを特徴とする請求項4に記載のコンベアシステム。
- 各モータローラ制御装置の回転数信号出力端子からの出力信号又は該信号に所定の処理を行った処理信号を集中制御装置に供給するように配線されていることを特徴とする請求項5に記載のコンベアシステム。
- 各モータローラ制御装置の回転数信号出力端子からの出力信号に基づいて各モータローラ制御装置に供給する信号をフィードバック制御することを特徴とする請求項5に記載のコンベアシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003034168A JP3632060B2 (ja) | 2003-02-12 | 2003-02-12 | モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003034168A JP3632060B2 (ja) | 2003-02-12 | 2003-02-12 | モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP11371899A Division JP3424013B2 (ja) | 1999-04-21 | 1999-04-21 | ブラシレスモータ駆動装置、並びに、コンベアシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003250289A JP2003250289A (ja) | 2003-09-05 |
| JP3632060B2 true JP3632060B2 (ja) | 2005-03-23 |
Family
ID=28672872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003034168A Expired - Lifetime JP3632060B2 (ja) | 2003-02-12 | 2003-02-12 | モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3632060B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013057767A1 (ja) * | 2011-10-20 | 2013-04-25 | 株式会社協和製作所 | モータ駆動装置およびこれを用いたローラコンベア装置 |
| JPWO2013057767A1 (ja) * | 2011-10-20 | 2015-04-02 | 株式会社協和製作所 | モータ駆動装置およびこれを用いたローラコンベア装置 |
| JP6212487B2 (ja) * | 2012-06-21 | 2017-10-11 | 伊東電機株式会社 | コンベア装置及びコンベア装置による重量検知方法 |
| JP6387504B2 (ja) * | 2013-04-30 | 2018-09-12 | 伊東電機株式会社 | ローラコンベア装置、及び機械装置の異常検知方法 |
| KR102595056B1 (ko) * | 2021-07-22 | 2023-10-27 | 주식회사 휴앤텍 | Fg출력단자를 이용한 모터정보 출력시스템 |
-
2003
- 2003-02-12 JP JP2003034168A patent/JP3632060B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003250289A (ja) | 2003-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3424013B2 (ja) | ブラシレスモータ駆動装置、並びに、コンベアシステム | |
| US6459224B2 (en) | Zone control method in roller conveyor and zone controller | |
| JP3799404B2 (ja) | ゾーン制御式コンベアシステムおよびゾーンコントローラ | |
| US6328136B1 (en) | Drive machine for elevators with drive sheave position detector | |
| US20020074883A1 (en) | Magnetic bearing apparatus | |
| KR101147966B1 (ko) | 인쇄회로기판의 삽입장치를 위한 공급장치 | |
| WO2001020342A3 (en) | Tachometer apparatus and method for motor velocity measurement | |
| HUP0204263A2 (en) | Wheel provided with driving means | |
| CN105599857A (zh) | 用于控制辅助马达的传感器装置以及具有这种传感器装置的轮毂单元 | |
| WO2000047372A1 (fr) | Dispositif et procede de commande d'un mecanisme d'assemblage, dispositif d'assemblage, dispositif robotique et procede de commande d'un tel dispositif robotique | |
| JP3632060B2 (ja) | モータローラ制御装置、ブラシレスモータ駆動装置、並びに、コンベアシステム | |
| JP6622551B2 (ja) | 自動車のブレーキシステムを作動するための装置および位置・回転センサ | |
| JP3123044U (ja) | 搬送用モータ装置 | |
| JP3845659B2 (ja) | 搬送装置 | |
| US11499842B2 (en) | Position detection system and method for detecting a movement of a machine | |
| JP4081828B2 (ja) | 同心多軸モータ | |
| ES2754369T3 (es) | Procedimiento de operación de una máquina eléctrica y máquina eléctrica | |
| US6349796B1 (en) | Starting drive control for elevator | |
| ATE466397T1 (de) | Radnabenmotor | |
| KR20110075740A (ko) | 영구자석 동기전동기를 적용한 알티비 주행 구동장치 | |
| JP2005031011A (ja) | 位置検出装置 | |
| JP2002159166A (ja) | リニアモータ用ポールセンサ | |
| JP3780311B2 (ja) | 搬送装置 | |
| JP2007135368A (ja) | モータ制御装置 | |
| KR100492616B1 (ko) | 비엘디시 모터의 회전속도 제어용 에프지 펄스 변환 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040712 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040910 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041201 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110107 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| EXPY | Cancellation because of completion of term |