JP3583115B2 - 流体機械の流量制御方法 - Google Patents
流体機械の流量制御方法 Download PDFInfo
- Publication number
- JP3583115B2 JP3583115B2 JP2002128276A JP2002128276A JP3583115B2 JP 3583115 B2 JP3583115 B2 JP 3583115B2 JP 2002128276 A JP2002128276 A JP 2002128276A JP 2002128276 A JP2002128276 A JP 2002128276A JP 3583115 B2 JP3583115 B2 JP 3583115B2
- Authority
- JP
- Japan
- Prior art keywords
- fluid machine
- flow rate
- fluid
- control method
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Control Of Positive-Displacement Air Blowers (AREA)
- Control Of Positive-Displacement Pumps (AREA)
Description
【発明の属する技術分野】
本発明は、流体を圧送するターボ形ブロワおよび圧縮機などの流体機械の流量制御方法に関する。
【0002】
【従来技術】
従来より、流体を圧送する流体機械の入口に設けられる可変入口案内羽根の開度および流体機械の被駆動軸の回転速度を制御することによって流体機械の運転を制御する運転制御方法がいくつか提案されている。
【0003】
例えば、この種の従来技術である、特開昭56−66490号公報では、流体機械の運転状態に対応した運転効率が最適になるように流体機械の入口に備える可変入口案内羽根の開度と流体機械の被駆動軸の回転速度とを演算して、この演算結果に基づいて可変入口案内羽根の開度と流体機械の被駆動軸の回転速度とを制御している。
【0004】
また、特開平9−133093号公報では、流体機械の設計流量より小流量で発生するサージングなどの運転状態の変動を迅速かつ精度良く検出して安定な作動を行わせるように流体機械の可変入口案内羽根の開度と流体機械の被駆動軸の回転速度とを制御している。
【0005】
【発明が解決しようとする課題】
上記の流体機械の運転制御方法は、いずれも流体機械の効率または運転の安定性のみに着目されたものであり、流体機械の流量制御範囲を広くすることについて考慮されていない。しかしながら、上記の流体機械が使用される曝気設備などの定圧力特性を有するプラントでは、流体機械の効率および運転の安定性だけでなく、広い流量制御範囲を確保することについても要望がある。特に、流体機械に吸い込まれる流体の流量が少ない場合または流体機械に吸い込まれる流体の吸込温度が上昇する場合において、流体機械から圧送される流体の吐出圧力がプラントに必要な圧力に維持されることが重要である。
【0006】
本発明は、以上の要望に鑑みてなされたものであり、流体機械から圧送される吐出圧力をプラントに必要な圧力に維持しながら広い流量制御範囲において安定的に高効率で流量制御することができる流体機械の流量制御方法を提供することを目的とする。
【0007】
【課題を解決するための手段】
本発明は、上記の課題を解決するために、流体機械に取り付けられる可変案内羽根の開度と、流体機械の被駆動軸の回転速度とを制御することによって、流体機械に吸い込まれる流体の流量を制御する流体機械の流量制御方法において、流体機械に吸い込まれる流体の吸込状態を示す吸込状態量に基づいて予め設定された流体の吸込流量を容積流量に換算した設定吸込容積流量を演算し、流体機械に吸い込まれる流体の流量が設定吸込容積流量になるように可変案内羽根の開度を制御する開度制御と、前記流体機械が前記流体を圧縮することによって得られる前記流体機械の等エントロピーヘッドを演算し、該等エントロピーヘッドと設定吸込容積流量とに基づいて流体機械の被駆動軸の目標回転速度を演算し、流体機械の被駆動軸の回転速度を目標回転速度になるように制御する回転速度制御とを組み合わせて制御することを特徴とする。
【0008】
ここで、上記の「吸込状態量」は、流体機械に吸い込まれる流体の吸込温度であってもよい。また、その他のものとして、流体機械に吸い込まれる流体の吸込圧力および湿度、または吸込圧力若しくは湿度なども併せて使用することもできる。また、「等エントロピーヘッド」とは、流体機械に吸い込まれる流体が等エントロピー圧縮される過程において加えられる流体の単位重量あたりの最少仕事である。
【0009】
この構成によれば、流体機械の可変案内羽根の開度制御によって、流体機械に吸い込まれる流体の流量が調整される。また、流体機械の被駆動軸の回転速度を制御することによって、流体機械から圧送される流体の吐出圧力を所定の値に維持する。これにより、流体機械の可変案内羽根によって調整される小流量域において、流体機械の吐出圧力が所定の値に満たない場合、流体機械の被駆動軸の回転速度を上昇させることにより所定の値を確保することができる。また、流体機械の昇圧能力が所定の値より大きい場合には、流体機械の被駆動軸の回転速度を下げることにより所定の値を確保することができる。このように流体機械の流量制御範囲を拡張することができる。ここで、「所定の値」とは、流体機械が設置されるプラントが必要とする圧力である。
【0010】
より具体的には、流体機械の可変案内羽根の開度制御は、上記の「設定吸込容積流量」をパラメータとして行われいる。また、流体機械の被駆動軸の回転速度制御は、「吸込容積流量と等エントロピーヘッド」とをパラメータとして行われている。
【0011】
上記の「吸込容積流量と等エントロピーヘッド」の関係は流体機械固有のものであり、その特性は回転速度一定の下では流体機械に吸い込まれる流体の吸込温度および吸込圧力など(吸込状態)に影響されない一定の関係を有する。また、流体機械の吸込容積流量は、流体機械の被駆動軸の回転速度比に略比例し、流体機械の等エントロピーヘッドは、流体機械の被駆動軸の回転速度比の2乗に略比例する。以上より、流体機械の吸込容積流量と等エントロピーヘッドとから流体機械の被駆動軸の必要回転速度が容易に予測することができる。なお、上記の吸込容積流量と等エントロピーヘッドとで表された流体機械の特性は、流体機械の被駆動軸の回転速度をパラメータとして、流体機械の性能試験によって予め作成され、流体機械を制御する制御器に記憶されている。また、これらの特性は、流体機械の安定的な運転および良い効率を得ることが考慮されている。
【0012】
そして、本発明では、上記の流体機械の特性を用いて、流体機械の「設定吸込容積流量」および「等エントロピーヘッド」から流体機械の被駆動軸の目標回転速度を算出し、流体機械の被駆動軸の回転速度が目標回転速度になるように制御している。
【0013】
以上より、流体機械が適用されるプラントに必要な流量が大きく変更される場合であっても本発明に係る流体機械の流量制御方法は十分対応することができる。
【0014】
また、本発明では、流体機械の流入通路および流出通路、または流入通路若しくは流出通路に介在する可変案内羽根の開度を制御することによって流体機械に吸い込まれる流体の流量を制御することもできる。
【0015】
一般的に、流体機械の流入通路に介在する可変案内羽根は「インレットガイドベーン」と、流体機械の流出通路に介在する可変案内羽根は「ディフュザーベーン」と呼ばれている。両者ともに流体機械に吸い込まれる流体の流量を制御する場合に使用され、特に、前者は流体機械の部分負荷効率を良くする場合に使用され、後者は流体機械の流量制御範囲を広くする場合に使用される。従って、流体機械の使用目的に応じてこれらの可変案内羽根を適宜選択する。これにより、流体機械の流量制御範囲を広くしたり、部分負荷効率を良くしたりすることができる。なお、「部分負荷効率」とは、設計点における流体機械に吸い込まれる流量を100%とした場合、例えば、50%の流量(部分負荷)で流体機械を運転する場合の効率をいう。
【0016】
また、本発明は、流体機械の設定吸込容積流量が予め設定された可変案内羽根固定値を越えるとき、可変案内羽根の開度を固定し、流体機械の被駆動軸の回転速度のみ制御することもできる。
【0017】
この構成によれば、流体機械に吸い込まれる流体の設定吸込容積流量が予め設定した可変案内羽根固定値を越えるとき、可変案内羽根の開度が固定されるので、流体機械の被駆動軸の回転速度のみにより流量制御を行うことができる。一方、可変案内羽根固定値以下では、流体機械の被駆動軸の回転速度と可変案内羽根の開度とを制御パラメータとして流量制御を行うことができる。なお、「可変案内羽根固定値」は、流体機械の効率が高効率となる点を選択する。これにより、流体機械に吸い込まれる流体の流量制御範囲を広くした場合であっても、全流量制御範囲において高い効率を維持することができる。
【0018】
すなわち、流体機械の被駆動軸の回転速度と可変案内羽根の開度とによる流量制御方法を用いて広範囲の流量制御範囲を網羅する場合、流体機械に吸い込まれる流体の流量が少なくなると効率は低下するが、この流量制御範囲を狭めることにより、小流量域での効率の低下を防ぐことができる。一方、流体機械の被駆動軸の回転速度による流量制御方法を用いて広い流量制御範囲を網羅する場合、流体機械に吸い込まれる流体の流量を多くすると効率が低下するが、流量制御範囲を狭めることにより、高い流量域での効率の低下を防止することができる。従って、流体機械の被駆動軸の回転速度と可変案内羽根の開度とによる流量制御方法と流体機械の被駆動軸の回転速度による流量制御方法を適宜組み合わせることにより、流体機械に、広い流量制御範囲で高い効率を維持させることができる。
【0019】
【発明の実施の形態】
別紙図面に基づいて、本発明の実施の形態について説明する。
【0020】
図1は、本発明に係る流量制御方法が適用される流体機械の縦断面図である。なお、ここでは、流体機械である送風機の一例として、ターボ形単段ブロワを例に説明するが、その他の流体機械に適用しても構わない。
【0021】
流体機械1は、渦巻き状のケーシング11を有し、該ケーシング11内には、径方向外方に向けて複数の羽根を備え、回転することによって流入する流体を昇圧する羽根車12が収納されている。ケーシング11の略中央部には、流入通路13が接続され、その途中に略扇形状をなし、羽根車12に流入する流体の流入方向と流入通路13の開口面積を調整する入口案内羽根14(可変案内羽根)が、流入通路13の周方向に複数配置されている。また、羽根車12の径方向外方には、羽根車12で昇圧された流体が滑らかに流出する方向に沿って複数の出口案内羽根15が周設されている。各出口案内羽根15間には、径方向外方に滑らかな拡大流路が形成されている。ケーシング11には、流体が流出する流出通路16が取り付けられている。
【0022】
このような構成によれば、流体機械1の羽根車12が回転することによって、図1の矢符GINが示すように流体が流入通路13を介して入口案内羽根14に導入される。該入口案内羽根14を流体の流入方向に対して開閉することにより、入口案内羽根14の下流の羽根車12に流体が流入する方向を調整する。これにより、流体機械1の効率の良い流量制御を行うことができる。そして、羽根車12に流入した流体は、径方向外方に向かって昇圧され、出口案内羽根15に流入する。出口案内羽根15も、流体の流入方向に対して開閉することができ、これにより羽根車12から流出する流体の速度エネルギを効率よく圧力変化させるとともに、出口案内羽根15の出口から流出する流体の流量を調整することができる。出口案内羽根15から流出した流体は、図1の矢符GOUTが示すように流出通路16から下流に連設される通路(図示せず)に流出する。
【0023】
図2は、流体機械1の制御系の構成について示している。流体機械1の流入通路13には、流量計測器30、圧力計測器31および温度計測器32が設けられ、流出通路16には、圧力計測器33が設けられている。羽根車12には、被駆動軸17を介して駆動機18が取り付けられており、被駆動軸17には、回転速度計34が設けられている。これらの計測器30〜34は、それぞれ回線51〜55を介して制御器50に接続され、各計測器からの信号が制御器50に入力されている。該制御器50は、回線58を介してアクチュエータ22と接続され、該アクチュエータ22は、制御器50からの信号に基づいて入口案内羽根14を伝達機構21を介して開閉する。また、制御器50は、駆動機18と回線56を介して接続され、制御器50からの信号に基づいて駆動機18に接続される被駆動軸17の回転速度を制御する。さらに、制御器50は、回線57を介してアクチュエータ20と接続され、該アクチュエータ20は、制御器50からの信号に基づいて出口案内羽根15を伝達機構19を介して開閉する。
【0024】
以上のように構成される流体機械1の流量制御方法について図2、図3および図4を参照しながら以下に説明する。なお、以下の説明では、上記の入口案内羽根14の制御と回転速度制御の組合せを一例として説明する。
【0025】
図3は、本発明に係る第1の流量制御方法のフローチャートである。まず、ステップB1では、流体機械1に吸い込まれる流体の基準状態における吸込流量Qを設定する。「基準状態」とは、流体機械1に吸い込まれる流体の温度および圧力が、例えば、0℃、1atmのように所定の温度および圧力である場合をいう。ここでは、説明簡単化のため基準状態として「基準温度」を用いる。
【0026】
次に、ステップB2では、流量計測器30、圧力計測器31および温度計測器32を用いて、流体機械1に吸い込まれる流体の吸込容積流量FI、吸込圧力PIおよび吸込温度TIをそれぞれ計測する。同様に、流体機械1から圧送される流体の吐出圧力POおよび流体機械1の被駆動軸17の回転速度SIをそれぞれ計測する。
【0027】
その後ステップB3〜B6およびステップB7〜B11が並行して処理される。
【0028】
具体的には、ステップB3では、ステップB1において設定した吸込流量Qを式(1)に基づいて吸込温度TIにより修正した設定吸込容積流量Qtを算出する。
【0029】
Qt=QxTI/基準温度 (1)
ステップB4では、ステップB3で算出した設定吸込容積流量Qtと計測された吸込容積流量FIとを比較して、前者が後者より小さい場合には、ステップB5に示すように入口案内羽根14を閉め、前者が後者より大きい場合には、ステップB6に示すように入口案内羽根14を開ける。その後、ステップB2に戻り、同様に、ステップB3〜B6が繰り返し行われる。
【0030】
以上のステップと並行して、ステップB7では、計測された吸込温度TI、吸込圧力PIおよび吐出圧力POから等エントロピーヘッドHが式(2)に基づいて算出される。
【0031】
【数1】
ここで、g:重力加速度、n:等エントロピー体積指数、R:ガス定数である。ステップB8では、等エントロピーヘッドHおよびステップB3で算出した設定吸込容積流量Qtを用いて流体機械1の被駆動軸17の目標回転速度SIiを算出する。ここで、流体機械1の被駆動軸17の回転速度(N1〜N5)をパラメータとした等エントロピーヘッドHおよび設定吸込容積流量Qtとの関係は、流体機械1の単体固有のものである。これらの関係は、予め行われる流体機械1の性能試験により求められ、上記の制御器50に記憶されている。上記の関係は、例えば、図4のように示すことができる。図4の横軸および縦軸は、それぞれ吸込容積流量および等エントロピーヘッドである。また、図4中の実線は、流体機械1の被駆動軸17の回転速度(N1〜N5、N1>N5)をパラメータとした特性曲線である。この特性曲線によれば、例えば、等エントロピーヘッドHと、吸込容積流量Qtとである場合、目標回転速度SIiはN2となる。ここでは、図で示してあるが、関数またはデータなどで制御器50に記憶しても構わない。
【0033】
ステップB9では、ステップB8において算出された目標回転速度SIiと計測された回転速度SIとを比較する。前者が後者より大きい場合、ステップ10に示すように流体機械1の被駆動軸17の回転速度SIを上昇させる。また、前者が後者より小さい場合、ステップB11に示すように流体機械1の被駆動軸17の回転速度SIを下降させる。その後、ステップB2に戻り、同様に、ステップB7〜B11が繰り返し行われる。
【0034】
以上のように、ステップB2〜B11が繰り返し行われるフィードバック制御を行うことにより、計測される吸込容積流量FIがステップB1において設定した吸込流量Qになるように制御する。
【0035】
次に、本実施の形態に係る第1の流量制御方法の効果について図5および図6に基づいて説明する。
【0036】
まず、図5に基づいて、入口案内羽根14のみを用いて流体機械1に吸い込まれる流体の流量制御を行う場合の流体機械1の一般的な特性を説明する。図5中、横軸の流量(%)は、流体機械1に吸い込まれる流体の設計吸込容積流量Qdに対する吸込容積流量FIの割合を示している。また、縦軸は、流体機械1の効率と吐出圧力POとを示している。
【0037】
図5では、流体機械1の被駆動軸17の回転速度Nを一定として、流体機械1の吐出圧力POと流量(%)との特性曲線および流体機械1の効率と流量(%)との特性曲線が、流体機械1の入口案内羽根開度IGVを制御パラメータとしてそれぞれ実線で記載されている。各特性曲線は、右肩下がりの曲線であり、流体機械1の運転可能な範囲を示している。図5中の特性曲線の左端の点を結んだ一点鎖線は、流体機械1のサージラインSL1を示している。該サージラインSL1の左側の領域は、流体機械1がサージングを起こし安定的な運転を行うことができない領域を示している。
【0038】
このような特性を持った流体機械1において、例えば、流体機械1の吐出圧力POがPoとして、流体機械1の流量制御範囲を略50%〜100%(C1〜C2の実線で示す)とすると、これに対応する流体機械1の予想効率軌跡は、図5の上図が示すようにC1〜C2の実線のように推移する。これらの値は、いずれも流体機械1の各入口案内羽根開度IGVに対する流体機械1の最高効率より低い。一方、流体機械1の効率を各入口案内羽根開度IGVに対して最高効率になるように流体機械1を運転しようとすると、図5の下図が示すようにE1〜E2のように流量制御範囲が狭くなる。従って、流体機械1の入口案内羽根開度IGVのみを制御パラメータとして流体機械1の流量制御を行う場合、流体機械1を高効率かつ安定的に広い範囲で流量制御を行うことは難しいことを示している。
【0039】
ところが、本発明に係る第1の流量制御方法では、流体機械1の流量制御に対して図6の実線に示すような特性曲線を有しており、上記の流量制御に比べて広い流量制御範囲で流体機械1が高効率かつ安定的に運転できることを示している。なお、図6中の破線は、図5に示した入口案内羽根開度IGVのみを制御パラメータとして流体機械1を流量制御する場合の特性曲線である。
【0040】
具体的には、入口案内羽根開度IGVが0%であり、回転速度Nが設計回転速度に比べて112%の場合の実線で示す右肩下がりの特性曲線は、同じ入口案内羽根開度IGVに対応する破線で示す特性曲線に比べて右側にシフトして上側に延びている。その結果、流体機械1に吸い込まれる流体の流量制御範囲を区間E1〜E2(SL1との交点)から区間E1〜E3のように広くすることができる。また、区間E1〜E3に対応する流体機械1の予想効率軌跡は、図6の上図に示すように高効率点を結ぶ実線D1〜D3のように推移する。これにより、流体機械1を広い流量制御範囲(この例では、流量(%)が40%である)において安定的に高効率で運転することができる。ここで、実線で示す流体機械1の特性曲線は、流体機械1の運転可能な限界を示すサージラインSL2が、所定の吐出圧力(図6中のPo)以上であり、そのサージラインSL2近傍の流体機械の効率が高効率になるように設定してある。
【0041】
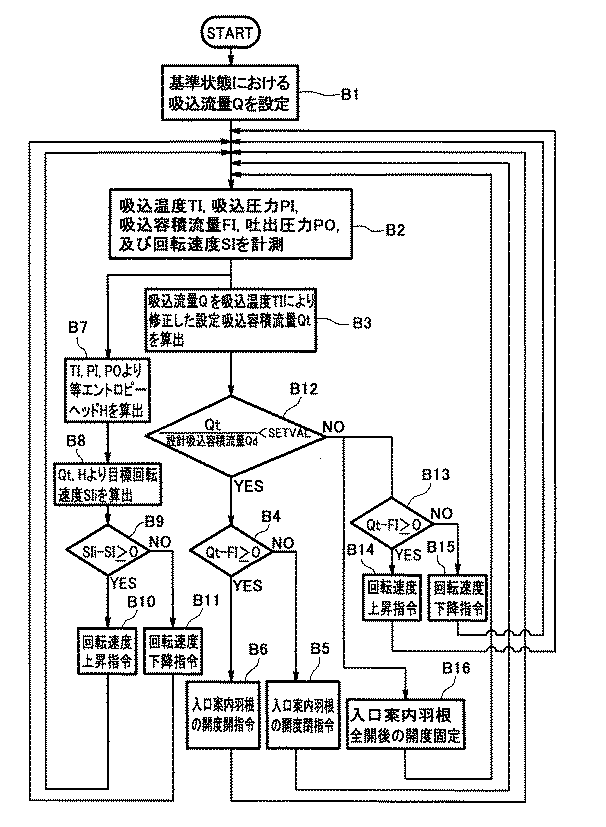
図7は、本発明に係る第2の流量制御方法のフローチャートである。該流量制御方法は、第1の流量制御方法とは、流体機械1に吸い込まれる流体の設定吸込容積流量Qtが所定の流量を越える場合に入口案内羽根14の開度を固定し、流体機械1の被駆動軸17の回転速度SIのみを制御することが異なる。以下の説明では、第1の流量制御方法と同等のステップには、同一の符号を付し、詳細な説明は省略する。
【0042】
上記のステップB1〜B2を実施した後、ステップB7〜B11を実施する。これと並行してステップB3が実施され、ステップB12が実施される。該ステップB12では、ステップB3で算出した設定吸込容積流量Qtと設計吸込容積流量Qdとの流量比を算出し、この計算結果を予め設定された可変案内羽根固定値SETVALと比較する。ここで、「設計吸込容積流量Qd」とは、流体機械1の設計時の流体機械1に吸い込まれる流体の流量である。上記流量比が可変案内羽根固定値SETVALより小さい場合、上記のステップB4〜B6が実施され、上記流量比が可変案内羽根固定値SETVALより大きい場合、ステップB16に示すように入口案内羽根14の開度を全開とし固定する。
【0043】
ステップB16と並行して、ステップB13に示すように設定吸込容積流量Qtと計測された吸込容積流量FIとを比較する。設定吸込容積流量Qtが計測された吸込容積流量FIに比べて大きい場合、ステップB14に示すように流体機械1の被駆動軸17の回転速度を上昇させる。設定吸込容積流量Qtが計測された吸込容積流量FIに比べて小さい場合、ステップB15に示すように流体機械1の被駆動軸17の回転速度を下降させる。
【0044】
これらの一連のステップB2〜B16が繰り返し行われるフィードバック制御により、計測される吸込容積流量FIがステップB1において設定した吸込流量Qになるように制御される。
【0045】
次に、本発明に係る第2の流量制御方法の効果について図8および図9に基づいて説明する。なお、図8および図9の横軸および縦軸は、図5と同様、それぞれ流量(%)並びに吐出圧力POおよび効率である。
【0046】
まず、図8に基づいて、流体機械1の被駆動軸17の回転速度Nのみを制御パラメータとして流量制御する場合の特性を説明する。図8中の実線は、流体機械1の効率が高効率になるように設計された場合の特性曲線を示し、図8中の破線は、流体機械1の効率に関して全く考慮せず流量制御範囲が広くなるように設計した場合の特性曲線を示す。図8の下図が示すように、流体機械1の吐出圧力POがPoである場合の流量制御範囲は、区間F1〜F2(流量(%):100%〜80%)から区間F1〜F3(流量(%):100%〜60%)に広くすることができる。しかし、これらに対応する流体機械1の予想効率軌跡は、図8の上図が示すように区間F1〜F2から区間F1〜F3に低下する。いずれの予想効率軌跡も右肩下がりの曲線となっている。そして、流体機械1に吸い込まれる流体の流量が少ない領域(F3点近傍)では、流体機械1の効率は略最高効率である。すなわち、流体機械1の被駆動軸17の回転速度Nのみを制御パラメータとして高効率な運転を行うためには、狭い流量制御範囲に限定する必要がある。
【0047】
そこで、本発明に係る第2の流量制御方法では、上記の点に着目し、流体機械1に吸い込まれる流体の流量が多い領域のみ回転速度Nによる流量制御を行い、それ以外の領域では、入口案内羽根開度IGVと回転速度Nとにより流量制御を行うようにしたものである。その特性曲線を図9に示す。同図では、流体機械1の設計点を流量(%)が100%の点としている。
【0048】
図9の下図の区間G1〜G2では、入口案内羽根開度IGVを100%に固定したまま流体機械1の被駆動軸17の回転速度Nを100%から96%に変化させる。これに対応して、流体機械1の流量(%)が100%〜80%に変化する。この時の流体機械1の予想効率軌跡は、図9上図に示すように区間G1〜G2のように変化する。また、区間G2〜G3では、流体機械1の入口案内羽根開度IGVと回転速度Nにより制御され、これに対応して流体機械1の流量(%)が80%〜40%に変化させることができる。この場合の流体機械1の予想効率軌跡は、図9の上図に示すように流体機械1の区間G2〜G3のように変化する。以上の流体機械1の予想効率軌跡は、いずれも略最高効率である。この場合の流体機械1の予想効率軌跡の区間G1〜G2は、図8の上図に示す予想効率軌跡の区間F1〜F2に対応する。また、流体機械1の予想効率軌跡の区間G2〜G3は、図6の上図に示す予想効率軌跡の区間D1〜D3に対応する。ただし、記号G3に対応する効率は、区間D1〜D3上の流量(%)が50%である場合の効率に対応する。このように、この実施の形態に係る第2の流量制御方法によれば、流体機械1の流量制御範囲を広くするだけでなく、流量制御範囲全体に亘って高効率を維持することができる。なお、図9では、流体機械1の流量制御方法を変える流量(%)、すなわち上記の可変案内羽根固定値SETVALを80%としているが、70〜90%が好ましい。しかしながら、可変案内羽根固定値SETVALを前記の値に限定するものではない。
【0049】
なお、ここでは、流体機械1の入口案内羽根開度IGVと回転速度Nとを用いて流量制御する場合について記述したが、これらの流量制御に替えて流体機械1の出口案内羽根開度と回転速度とを用いて流量制御を行うこともでき、同様の効果が得られる。さらに、上記の流量制御に替えて、流体機械1の入口案内羽根開度IGV、出口案内羽根開度および回転速度を用いて流量制御を行っても良く、この場合も同様の効果が得られる。
【0050】
【発明の効果】
本発明に係る流量制御方法は、流体機械の可変案内羽根の開度制御および流体機械が流体を圧縮することによって得られる流体機械の等エントロピーヘッドと設定吸込容積流量とに基づいて行われる流体機械の被駆動軸の回転速度制御により、広い流量制御範囲において安定的かつ高効率な流量制御を行ことができる。
【図面の簡単な説明】
【図1】本発明に係る流量制御方法が適用される流体機械の縦断面図である。
【図2】本発明に係る流量制御方法が適用される流体機械の制御系の系統図である。
【図3】本発明に係る第1の流量制御方法のフローチャートである。
【図4】流体機械の等エントロピーヘッド、吸込容積流量および回転速度の関係を示す図である。
【図5】流体機械の入口案内羽根開度のみを制御パラメータとして流量制御を行う場合の流体機械の一般的な特性を示す図である。
【図6】本発明に係る第1の流量制御方法を用いた場合の流体機械の特性を示す図である。
【図7】本発明に係る第2の流量制御方法のフローチャートである。
【図8】流体機械の回転速度を制御パラメータとして流量制御を行う場合の流体機械の特性を示す図である。
【図9】本発明に係る第2の流量制御方法を用いた場合の流体機械の特性を示す図である。
【符号の説明】
1 流体機械
12 羽根車
14 入口案内羽根
15 出口案内羽根
17 被駆動軸
18 駆動機
20 アクチュエータ
22 アクチュエータ
30 流量計測器
31 圧力計測器
32 温度計測器
33 圧力計測器
34 回転速度計
50 制御器
Q 吸込流量
Qt 設定吸込容積流量
H 等エントロピーヘッド
SI 回転速度
SIi 目標回転速度
Claims (5)
- 流体機械に取り付けられる可変案内羽根の開度と、流体機械の被駆動軸の回転速度とを制御することによって、流体機械に吸い込まれる流体の流量を制御する流体機械の流量制御方法において、
前記流体機械に吸い込まれる前記流体の吸込状態を示す吸込状態量に基づいて、予め設定された前記流体の吸込流量を容積流量に換算した設定吸込容積流量を演算し、前記流体機械に吸い込まれる前記流体の流量が前記設定吸込容積流量になるように前記可変案内羽根の開度を制御する開度制御と、
前記流体機械が前記流体を圧縮することによって得られる前記流体機械の等エントロピーヘッドを演算し、該等エントロピーヘッドと前記設定吸込容積流量とに基づいて前記流体機械の被駆動軸の目標回転速度を演算し、前記流体機械の被駆動軸の回転速度を前記目標回転速度になるように制御する回転速度制御とを組み合わせて制御することを特徴とする流体機械の流量制御方法。 - 請求項1記載の流体機械の流量制御方法において、
前記流体機械の流入通路または流出通路に介在する可変案内羽根の開度を制御することによって前記流体機械に吸い込まれる前記流体の流量を制御することを特徴とする流体機械の流量制御方法。 - 請求項1記載の流体機械の流量制御方法において、
前記流体機械の流入通路および流出通路に介在する可変案内羽根の開度を制御することによって前記流体機械に吸い込まれる前記流体の流量を制御することを特徴とする流体機械の流量制御方法。 - 請求項1乃至3のいずれかに記載の流体機械の流量制御方法において、
前記吸込状態量が、少なくとも前記流体機械に吸い込まれる前記流体の温度であることを特徴とする流体機械の流量制御方法。 - 請求項1乃至4のいずれかに記載の流体機械の流量制御方法において、
前記設定吸込容積流量が予め設定された可変案内羽根固定値を越えるとき、前記可変案内羽根の開度を固定し、前記流体機械の被駆動軸の回転速度のみ制御することを特徴とする流体機械の流量制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002128276A JP3583115B2 (ja) | 2002-04-30 | 2002-04-30 | 流体機械の流量制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002128276A JP3583115B2 (ja) | 2002-04-30 | 2002-04-30 | 流体機械の流量制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003322096A JP2003322096A (ja) | 2003-11-14 |
| JP3583115B2 true JP3583115B2 (ja) | 2004-10-27 |
Family
ID=29542083
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002128276A Expired - Fee Related JP3583115B2 (ja) | 2002-04-30 | 2002-04-30 | 流体機械の流量制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3583115B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009156086A (ja) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | ガスタービンエンジンの制御装置 |
| JP6466129B2 (ja) * | 2014-10-14 | 2019-02-06 | 株式会社日立製作所 | 流体機械の制御装置、及び流体機械の制御方法 |
| IT202100010460A1 (it) * | 2021-04-26 | 2022-10-26 | Nuovo Pignone Tecnologie Srl | Hydrogen compressing assembly, hydrogen production plant, and compressing method. |
-
2002
- 2002-04-30 JP JP2002128276A patent/JP3583115B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003322096A (ja) | 2003-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101842599B (zh) | 控制系统 | |
| CN101896773B (zh) | 用于具有入口和出口流量控制装置的hvac系统的控制装置 | |
| CN105308329A (zh) | 用于控制涡轮压缩机的方法和系统 | |
| JP6431896B2 (ja) | 副流を有するターボ圧縮機のアンチサージ制御のための方法及びシステム | |
| JP5634907B2 (ja) | 圧縮機の制御装置及び制御方法 | |
| CN103867446B (zh) | 对多级压缩系统进行防喘振控制的方法 | |
| CN110195659A (zh) | 燃气涡轮发动机压缩机管理系统 | |
| CN107849981A (zh) | 燃气轮机的控制装置及方法、燃气轮机的控制程序、燃气轮机 | |
| JP3583115B2 (ja) | 流体機械の流量制御方法 | |
| JP4963507B2 (ja) | 多段遠心圧縮機の容量制御方法 | |
| JP6673733B2 (ja) | 圧縮機の修正回転数算出方法、圧縮機の制御方法、これらの方法を実行する装置、及びこの装置を備えるガスタービンプラント | |
| JP3581139B2 (ja) | 流体機械の流量制御方法 | |
| KR102229398B1 (ko) | 압축기 시스템 및 이의 제어 방법 | |
| US9574572B2 (en) | Compressor control method and system | |
| JP3590033B2 (ja) | 流体機械のサージ防止方法 | |
| KR20210052398A (ko) | 압축기 시스템 및 이의 제어 방법 | |
| JP6715701B2 (ja) | 流体機械の制御方法および流体機械の制御装置 | |
| JP7022523B2 (ja) | 流体機械 | |
| JPH10122184A (ja) | 多段遠心圧縮機 | |
| EP2505849A1 (en) | Method and system for energy optimization of a centrifugal compressor | |
| HK1151087A (en) | Control device for hvac systems with inlet and outlet flow control devices | |
| CZ2000443A3 (cs) | Způsob a zařízení pro řízení stabilní práce odstředivého kompresoru |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040727 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040727 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3583115 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080806 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090806 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100806 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110806 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110806 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120806 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120806 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130806 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130806 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |