JP3187004U - 運転者によって制御される車両 - Google Patents
運転者によって制御される車両 Download PDFInfo
- Publication number
- JP3187004U JP3187004U JP2013002616U JP2013002616U JP3187004U JP 3187004 U JP3187004 U JP 3187004U JP 2013002616 U JP2013002616 U JP 2013002616U JP 2013002616 U JP2013002616 U JP 2013002616U JP 3187004 U JP3187004 U JP 3187004U
- Authority
- JP
- Japan
- Prior art keywords
- chassis
- vehicle
- driver
- force
- vehicle according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D9/00—Steering deflectable wheels not otherwise provided for
- B62D9/02—Steering deflectable wheels not otherwise provided for combined with means for inwardly inclining vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/10—Cycles with handlebars, equipped with three or more main road wheels with means for inwardly inclining the vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/45—Rolling frame vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Vehicle Body Suspensions (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
【課題】運転者への実感覚のフィードバックと優れた均衡とを得ることができる運転者によって制御される車両を提供する。
【解決手段】(a)道路によって支持される第1のシャーシ2と、(b)運転者6を支持すると共に第1のシャーシ2に可動結合するように構成され、道路とは機械的に接触しない第2のシャーシ5と、(c)車両の動きを制御するように構成された少なくとも1つの機構とを備えている。上述の機構が、第2のシャーシ5内に設けられかつステアリングユニットに連結されており、同一の方向にステアリングされた際に、動いているバイクの前輪に作用する力の方向を復元させるジャイロを備えている。
【選択図】図1
【解決手段】(a)道路によって支持される第1のシャーシ2と、(b)運転者6を支持すると共に第1のシャーシ2に可動結合するように構成され、道路とは機械的に接触しない第2のシャーシ5と、(c)車両の動きを制御するように構成された少なくとも1つの機構とを備えている。上述の機構が、第2のシャーシ5内に設けられかつステアリングユニットに連結されており、同一の方向にステアリングされた際に、動いているバイクの前輪に作用する力の方向を復元させるジャイロを備えている。
【選択図】図1
Description
本考案は、概して、運転者によって制御される車両に関し、より特定的には、車両に対する運転者の身体の瞬間的な位置に応じて、車両の部分間の相対的な位置に応じて、並びに、車両、運転者及びそれらの任意の部分に印加される力に応じて制御される車両に関する。
自動車産業における電子制御方式による運転(DbW)技術は、従来の機械及び油圧制御システムを、電子機械アクチュエータ並びにペダル及びステアリングホイール・エミュレータのごとき人間機械インタフェースを用いた電子制御システムに置換する。従って、ステアリングコラム、中間シャフト、ポンプ、ホース、液体、ベルト、冷却器、ブレーキブースタ及びマスターシリンダのごとき従来の構成要素は、車両から除去される。
DbW技術は、ステアリングコラムに関連した衝突損傷の危険度を減少させると共に、キャビンの再設計から技術者を解放させるものとして認識されてきた。DbW技術は、さらに、ステアリング・ヒューマン・インタフェースが、例外的な形状及び配達方法を呈することを可能にする。さらにまた、ほとんどの場合、現在のDbWシステムは、従来の陸上及び航空車両で良く知られている従来の手動制御のステアリングインタフェースを保有する。
手動によるヒューマン・インタフェース、特にDbWのヒューマン・インタフェースは、直感的な使い易さを提供するが、車両の均衡を維持することが難しく、かつ充分なステアリングフィードバックを提供しないことで知られている。さらに、これが提供する運転感覚(driving experience)は、運転感覚の向上を損ねるであろう主に着席した静止状態のものである。
従って、運転者への実感覚のフィードバックと優れた均衡とを得ることができるDbWステアリングシステム用のヒューマン・インタフェースを提供することが長年に渡って切望されていた。さらに、この種のインタフェースは、完全かつ挑戦的な運転感覚を求める要望に回答するものである。
本考案によれば、(a)道路によって支持される第1のシャーシと、(b)運転者を支持すると共に第1のシャーシに可動結合するように構成され、道路とは機械的に接触しない第2のシャーシと、(c)車両の動きを制御するように構成された少なくとも1つの機構とを備え、運転者によって制御される車両が提供される。
本考案の1つの主たる特徴は、第2のシャーシに印加されかつ第1のシャーシ及び第2のシャーシ間の結合点を向く力の合成ベクトルを運転者が維持可能であり、これにより、第2のシャーシ及び運転者の質量中心の直線的変位の水平成分が求心力、加速力又は減速力の水平成分と同一の方向を向くように、上述の機構が、第2のシャーシ及び運転者の身体の変化位置に非弾性的に反応するように構成されていることにある。
本考案の他の主たる特徴は、上述の機構が、第2のシャーシに印加されかつ第1のシャーシ及び第2のシャーシ間の結合点を向く力の合成ベクトルを運転者が維持可能であり、これにより、第2のシャーシ及び運転者の質量中心の直線的変位の水平成分が求心力、加速力又は減速力の水平成分と同一の方向を向くように構成されていることにある。
第2のシャーシが、運転者と置換可能であることが好ましい。
車両の動きが、第2のシャーシの位置に従って制御されることも好ましい。
不安定な車両の動き及び実時間の道路条件における車両グリップの損失を認識するように構成された検知手段を備えたことも好ましい。
制御機構が、ステアリング・ユニットをさらに備えており、車両が第1のシャーシに対する第2のシャーシの角度及び直線的変位とは別個にステアリングを手動制御するように構成されていることも好ましい。
瞬間的な位置の変化が、第1のシャーシに対する第2のシャーシ及び第2のシャーシに対する運転者の身体の角度及び直線的変位によって特徴付けられることも好ましい。
第2のシャーシが、第1のシャーシに対するこの第2のシャーシの傾きにより、長手方向及び横方向の道路勾配を補償するように構成されていることも好ましい。
第2のシャーシが、この第2のシャーシを所定位置の安定させるように構成されている安定化手段をさらに備えていることも好ましい。
第2のシャーシに印加される力の均衡が、運転方向、速度、加速及び減速を変化させること、第1のシャーシに対して第2のシャーシの傾けること、第2のシャーシの安定化位置を調整すること、並びにこれらの任意の組合せからなる群から選択される車両特性を制御することによってなされるように構成されていることも好ましい。
第2のシャーシに印加される力の均衡が、運転方向、速度、加速及び減速を変化させること、第1のシャーシに対して第2のシャーシの傾けること、第2のシャーシの安定化位置を調整すること、並びにこれらの任意の組合せからなる群から選択される車両特性を制御することによってなされるように機構を制御するべくあらかじめプログラムされたコンピュータ手段をさらに備えていることも好ましい。
コンピュータ手段が、第2のシャーシのその縦軸に関する角度回転及び第1のシャーシに対する横方向の直線的変化によって並びに車両の動きの変化によって車両及びその部分に印加される力に応じて車両の均衡をとるように構成されていることも好ましい。
コンピュータ手段が、車両及びその部分に印加される力に応じて車両の動きを制御するように構成されていることも好ましい。
車両を均衡させかつ運転者の瞬間的な位置に従って道路をグリップする位置であって、第1のシャーシに対して最適に調整された位置に第2のシャーシが安定化されるように安定化手段を制御するべくあらかじめプログラムされたコンピュータ手段をさらに備えていることも好ましい。
第1のシャーシ及び第2のシャーシを所定の相互位置に固定するように構成された結合部を備えていることも好ましい。
安定化手段が、ジャイロ、実時間調節可能なばね若しくは弾性体、液体シリンダ、摩擦装置、磁気構成要素、及びこれらの任意な組合せからなる群から選択されることも好ましい。
前述の力が、重力、遠心力、加速力、減速力及びこれらの任意の組合せからなる群から選択されることも好ましい。
本考案及びその実際の実施形態をより良く理解するために、添付の図面を参照した非限定的な例のみにより複数の実施形態が以下に記載されている。
以下の記載は、本考案の全ての章と共に、いかなる当業者も本考案を使用でき、本考案を実施する考案者により予期される最良の形態に言及できるように提供されるものである。本考案の一般的な原理は車両を制御するためのヒューマン・インタフェースを提供するために特に規定されているが、当業者によれば、種々の変更態様は明らかである。
「電子制御方式による運転(DbW)」という用語は、以下、従来の機械及び油圧制御システムを、電子機械アクチュエータと例えばペダル及びステアリングホイール・エミュレータのごとき人間機械インタフェースとを用いた電子制御システムに置換する技術であると参照する。
「制御」という用語は、以下、本体の空間的方向又は速度に影響するものであると参照する。
「シャーシ」という用語は、以下、車両のごとき運動体を備えた複数の要素が取り付けられる、連続する物体、交互配置された物体、曲がりくねった材料、棒若しくはパイプの構成、又はそれらの組合せからなる群から選択される形で形成される主たるプラットフォームであると参照する。
「結合点」という用語は、以下、第1及び第2のシャーシ間の関節の幾何学的中心であると参照する。
「動き」という用語は、以下、空間的な変化、方向の変化、対向する方向の変化及び速度変化を含み、本体若しくその部分の仮想又は実際の位置におけるあらゆる変化であると参照する。
「調整」という用語は、以下、さもなければ制御システムに対して意図的ではないかつ望ましくない指示を引き起こすであろう、その状況下の又はその他の要因を配慮すべく、センサ又は検出器から得られるデータへの完全な無視を含むあらゆる再調整であると参照する。
図1及び図2に示すように、運転者6は、特に重力9及び遠心力10等のその身体に作用する力に応じて、その一部と均衡をとるために、座席3/ハーネス及びフットレストと共に傾く。全てのサスペンション及び車輪1(その道路表面に対する角度/配置)は、上述した傾きの影響を受けない。傾きの機能がない同様の車両と比較した場合、車両及び運転者の重力9の中心は大部分の荷重を支えている車輪1に向かっては変化せず、より少ない荷重を支えている車輪への荷重が増加すると共に大部分の荷重を支えている前述の車輪への荷重が減少する。
車輪1及びサスペンション上の荷重の均衡をとることは、タイヤ及びサスペンションが過大負荷/過少負荷を受けないという好ましい動作となるため、より良好な路面グリップ及び乗り心地を提供する。サスペンション及び車輪は、サスペンション、タイヤ及び車輪の最高性能で傾いていることには影響を受けない。運転者の身体が傾くことは、(二輪車に乗ることと同様の)より良好な運転感覚及び横方向の力への運転者の抵抗(例えば、遠心力、加速力及び減速力)となる。
運転者6及び第2のシャーシ5を、直立又は運転者所望の他の任意の位置に支持することを支援するため、第2のシャーシ5を所定位置に支持するように構成された2つのシャーシの間に配置されたばねによって提供される安定システムが必要かもしれない。運転者6は、第2のシャーシ5に対する自身の質量中心7を変えること、又はカウンターステアリングを行うことによって第2のシャーシ5を傾けることができる。第2のシャーシ5内のジャイロ又はコンピュータ制御による電子機械システムを設けることも、本考案の範囲に含まれる。
本考案は、モーターバイクがそのライダーによって操作されるのと同様に運転者が車両を操作するような車両を構築する機会を与えるものである。同時に、本考案は、車両の設計者に、例えば3つ、4つ若しくはそれ以上又はそれより少ない車輪又はスキーを有する車両を設計する自由度を与える。その場合、サスペンションの構成及び車輪の配置は最適な状態を維持し、運転者の位置、車輪の指示方向又は他の任意の重要でないパラメータの影響を必ずしも受けない(公序良俗違反につき、不掲載)。サスペンションの構成及び車輪の配置は、例えば、自動車のサスペンション及び車輪と同様に設計される。これは、1つのシャーシのピッチ、ヨー又はロールが他のシャーシに対して最小の影響を与えるように、全てのサスペンション、車輪又はスキーを担持しているシャーシの動きを運転者を担持しているシャーシの動きから可能な限り切り離すことにより達成される。同時に、第2のシャーシ及び運転者の質量中心の水平ベクトルが、求心力、加速力又は減速力の水平ベクトルと同じ方向に動く。これは、傾きの機能がない同様の車両と比較して、車両に作用するロールトルクを減少させる。
従って、本考案の主な3つの原理は、
(1)全てのサスペンション、車輪1又はスキーを担持している第1のシャーシ2の動きを運転者6を担持している第2のシャーシ5の動きから分離すること、
(2)第2のシャーシ5及び運転者6の質量中心7の直線的変位の水平成分が、求心力、加速力又は減速力の水平成分と同じ方向に向いていること、
(3)重力9及び遠心力10による合成力8が、第1のシャーシ2及び第2のシャーシ5の結合点4を向かなければならない。運転者6は、ハーネスを適切に装着した(座席3に適切に着席した)際に、その身体に側方の力及び前後の力が作用しないことを感じなければならない。
(1)全てのサスペンション、車輪1又はスキーを担持している第1のシャーシ2の動きを運転者6を担持している第2のシャーシ5の動きから分離すること、
(2)第2のシャーシ5及び運転者6の質量中心7の直線的変位の水平成分が、求心力、加速力又は減速力の水平成分と同じ方向に向いていること、
(3)重力9及び遠心力10による合成力8が、第1のシャーシ2及び第2のシャーシ5の結合点4を向かなければならない。運転者6は、ハーネスを適切に装着した(座席3に適切に着席した)際に、その身体に側方の力及び前後の力が作用しないことを感じなければならない。
二輪車に乗る際に、例えば車輪のジャイロ効果は、ライダーが均衡を維持することを支援する。本考案の目的は、運転者が、自身及び車両に作用する重力、遠心力、加速力及び減速力のような常に変化する力の状況下において、所望の位置を保つことを支援することにある。
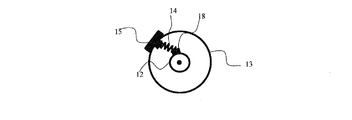
図3〜図6は、本考案の一実施形態を示している。これらの図に示すように、ばね14は、第1のシャーシ12と、この第1のシャーシ12の回りを回転可能である第2のシャーシ13とを相互に連結している。第2のシャーシ13は座席15及びハンドル17を備えている。ばね14は、第1のシャーシ12の回りにおける第2のシャーシ13の進路において、1点(以降、最適点)のみがばねの両端間における最小距離を有するように構成されている(図4及び図5に示されている)。進路上の(図3及び図6に示される)他のいかなる点においても、最適点に向かってシャーシを駆動しようとこのシャーシに印加される力が生じることとなる。第1のシャーシ12上に位置するばねの端は、電気モータ16のシャフト上の鋭い突起18に接続されている。電気モータ16は、突起18の位置、従ってばね14の両端間の最小距離の経路状の点、即ち最適点、を制御する。電気モータ16は、最適点の位置を算出するコンピュータ(図示せず)によって制御される。コンピュータの決定は、センサの読み取り値に基づいている。第2のシャーシ13上に配置される加速度計19は、重力、遠心力、加速力及び減速力による力を測定する。センサの読み取り値から、合成力が第1のシャーシ及び第2のシャーシ間の結合中心を指していないことを示している場合、コンピュータは、センサによって測定された合成力が再び結合中心を指す位置(新しい最適点)へ第2のシャーシが動くことを支援する力を生成するようにシャフトを回転させる。例えば、合成力が結合中心の左を指している場合、シャフトを右に回転して第2のシャーシを右に回転する力を生成する。第2のシャーシが右に回転すると、合成力はより右を指すこととなる。
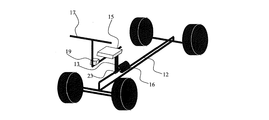
図9は、傾斜角が加速度計19からの読み取り値に基づいている実施形態を示している。合成力が第1のシャーシ12及び第2のシャーシ13を相互接続している結合点23を指していないことを加速度計の読み取り値が示す場合、電気モータ16は第2のシャーシ13及び第1のシャーシ12間の傾斜角を変化させ、合成力が結合点を指すようにする。例えば、検出された合成力が結合点の左を指している場合、電気モータは第2のシャーシを右に傾け、合成力がより右を指すようにする。
図8は、第2のシャーシ13上に位置する運転席15を示している。ローラ22は、第1のシャーシ12に取り付けられたレール21内/その上面上に配置されている。レール21の湾曲がこのレールに沿ったあらゆる位置における座席の傾斜角度を規定する。この特定の実施形態において、座席面に垂直の方向が上述の結合点と考えられる左右対称のレールの中心を向いている。
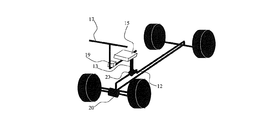
図10は、前輪の角度が加速度計19からの読み取り値に基づいている実施形態を示している。合成力が第1のシャーシ12及び第2のシャーシ13間の結合点23を指していないことを加速度計の読み取り値が示す場合、電気モータ20は自在軸受け式の車輪の方向を変化させ、合成力が結合点を指すようにする。例えば、検出された合成力が結合点の左を指している場合、電気モータ20は車輪を左に回して遠心力をより右に変化させることにより合成力がより右を指すようにする。傾斜角を変化させることにより、合成力上の重力ベクトルも変化する。
非均衡(不安定)を検出するアルゴリズムは、以下の通りである。本考案によれば、運転者(第2のシャーシ)が変位する/傾くべき角度及び速度は、そのための機構によって再度決定される。この機構の動作目的は、第2のシャーシ(運転者)を第1のシャーシに対して(機構によって算出された)最適位置に支持するために、安定化手段を構成することである。
なお、図7に示すように、第2のシャーシが長手方向に傾斜可能であっても良い。
図11は、本考案のコンピュータ化されたシステムを示している。力センサ110/210/310は、第2のシャーシの非均衡状態を検出するように構成されている。この状態は、第2のシャーシに印加される横方向/前方向/後方向の力を測定することにより示すことができる。マイクロコントローラユニット(MCU)120、220及び320は、センサ110/210/310から信号を受信し、アクチュエータ130、230及び330にあらかじめプログラムされた動作を開始させる。特に、MCU120は、安定化機構140に機械的に接続されているアクチュエータ130を制御する。アクチュエータ130は、運転者が、第2のシャーシに印加される力が均衡する第2のシャーシ位置を保持することを支援する点で/方法で第2のシャーシを支持するように安定化機構を構成する。方向及び速度制御機構240は、MCU220により制御されるアクチュエータ230によって作動せしめられる。アクチュエータ230は、力の影響を最小化する/均衡を復元する方向に車輪を回転させる。アクチュエータ230は、力の影響を最小化する/均衡を復元する方法で、車両の加速/減速を行う。第2のシャーシ制御機構340は、力の影響を最小化する/均衡を復元する方法で第2のシャーシを横方向/前方向/後方向に傾かせるアクチュエータ330によって作動せしめられる。
上述の実施形態の変更態様においては、例えば運転者のハーネス若しくは座席に又はハンドルに位置するセンサによって、車両の方向若しくは速度を傾かせる又は変化させるという運転者の意志についても知ることもできる。これにより、システムは、第2のシャーシを傾ける、若しくは第2のシャーシを傾けることを支援する、又は車両の方向若しくは速度を変化させる。例えば、第2のシャーシが均衡を保つ状況でありかつシステムが運転者が左に傾きたいことを感知した場合、システムは例えば電気モータ(図9)を使用して第2のシャーシを傾け、第2のシャーシを非均衡にし、これにより、運転者は、第2のシャーシ上の力の釣合いをとるべく重力及び遠心力の支援を得るために、車輪を左に向ける。
本考案の一実施形態によれば、車輪の傾斜角及び方向を制御するシステムは、第2のシャーシが均衡を保ちかつ座席のセンサによって運転者が左に傾きたいことを感知した状況において、第2のシャーシを傾けて第2のシャーシを非均衡にし、これにより、システムは、第2のシャーシ上の力の釣合いをとるべく重力及び遠心力の支援を得るために、車輪を左に向ける。
不安定な車両の動きは、重力、遠心力、意図された加速、意図された減速以外の力から発生し、車両のシャーシに影響を及ぼす動きであると規定される。これらの力は、非平坦な道路、風、エンジン振動等の結果であり得る。これらの力は、特に、重力、遠心力、加速又は減速を検出するために実際に使用される場合、例えば加速度計(又はジャイロ)により検出されるであろう。上述した機構は、検出された信号がノイズであり機構の作動に影響を及ぼさないことを考慮してその動作を規制すべきである。本考案の他の態様として、検出された信号が異常な状況(例えばグリップの損失)を示す場合がある。この場合、上述した機構は、運転者の傾斜角を変化させるか、ステアリングホイールの角度を変化させるか、又は速度を変化させるに動作する。
上述した機構の特定の実施態様において、例えば、ステアリング角度、第1及び第2のシャーシ間の角度、並びに車両の速度に基づく力を推測しようとして、上述の機構が第1のシャーシ及び仮想レベル表面(重力の方向を表す)間の角度を無視した場合、上述した仮想レベル表面、即ち重力(遠心力、加速及び減速も同様)の方向に対する運転者の角度を知ることについての機構の動作不履行によって、誤りが発生するであろう。このような問題を救済するために、センサ(例えばジャイロ)を第1のシャーシに設け、第1のシャーシ及び上述の仮想レベル表面間の角度を検出するように構成する。
本考案の実施形態における動作例を以下に説明する。
第2のシャーシ上で測定される力は運転者について測定される力を表している。車両は、合成力(重力、遠心力、加速及び減速の合成)が第2のシャーシ上の座席から第1のシャーシ及び第2のシャーシの実際の/仮想の結合部(結合点)に向かっているときに均衡している。運転者が自身の質量中心を変化させ、第2のシャーシを非均衡に動かすと、加速度計は合成力が変化したことを検知する。コンピュータは加速度計を読み取り、その読み取り値は、均衡のとれた車両に対応するあらかじめ調整された力とは異なる合成力であることを示す。コンピュータは、ステアリングホイール、加速又は減速を制御することによって、車両の動きを制御する。コンピュータは、均衡を回復するための力を車両に印加するために、車両の動きを変化させる。
以上述べた実施形態は全て本考案を例示的に示すものであって限定的に示すものではなく、本考案は他の種々の変形態様及び変更態様で実施することができる。従って本考案の範囲は実用新案登録請求の範囲及びその均等範囲によってのみ規定されるものである。
1 車輪
2、12 第1のシャーシ
3、15 座席
4、23 結合点
5、13 第2のシャーシ
6 運転者
7 重心
8 合成力
9 重力
10 遠心力
14 ばね
16、20 電気モータ
17 ハンドル
18 突起
19 加速度計
21 レール
22 ローラ
110、210、310 力センサ
120、220、320 MCU
130、230、330 アクチュエータ
140 安定化機構
240 方向及び速度制御機構
340 第2のシャーシ制御機構
2、12 第1のシャーシ
3、15 座席
4、23 結合点
5、13 第2のシャーシ
6 運転者
7 重心
8 合成力
9 重力
10 遠心力
14 ばね
16、20 電気モータ
17 ハンドル
18 突起
19 加速度計
21 レール
22 ローラ
110、210、310 力センサ
120、220、320 MCU
130、230、330 アクチュエータ
140 安定化機構
240 方向及び速度制御機構
340 第2のシャーシ制御機構
本考案は、モーターバイクがそのライダーによって操作されるのと同様に運転者が車両を操作するような車両を構築する機会を与えるものである。同時に、本考案は、車両の設計者に、例えば3つ、4つ若しくはそれ以上又はそれより少ない車輪又はスキーを有する車両を設計する自由度を与える。その場合、サスペンションの構成及び車輪の配置は最適な状態を維持し、運転者の位置、車輪の指示方向又は他の任意の重要でないパラメータの影響を必ずしも受けない。サスペンションの構成及び車輪の配置は、例えば、自動車のサスペンション及び車輪と同様に設計される。これは、1つのシャーシのピッチ、ヨー又はロールが他のシャーシに対して最小の影響を与えるように、全てのサスペンション、車輪又はスキーを担持しているシャーシの動きを運転者を担持しているシャーシの動きから可能な限り切り離すことにより達成される。同時に、第2のシャーシ及び運転者の質量中心の水平ベクトルが、求心力、加速力又は減速力の水平ベクトルと同じ方向に動く。これは、傾きの機能がない同様の車両と比較して、車両に作用するロールトルクを減少させる。
図3〜図6は、本考案の一実施形態を示している。これらの図に示すように、ばね14は、第1のシャーシ12と、この第1のシャーシ12の回りを回転可能である第2のシャーシ13とを相互に連結している。第2のシャーシ13は座席15及びハンドル17を備えている。ばね14は、第1のシャーシ12の回りにおける第2のシャーシ13の進路において、1点(以降、最適点)のみがばねの両端間における最小距離を有するように構成されている(図4及び図5に示されている)。進路上の(図3及び図6に示される)他のいかなる点においても、最適点に向かってシャーシを駆動しようとこのシャーシに印加される力が生じることとなる。第1のシャーシ12上に位置するばねの端は、電気モータ16のシャフト上の鋭い突起18に接続されている。電気モータ16は、突起18の位置、従ってばね14の両端間の最小距離の経路上の点、即ち最適点、を制御する。電気モータ16は、最適点の位置を算出するコンピュータ(図示せず)によって制御される。コンピュータの決定は、センサの読み取り値に基づいている。第2のシャーシ13上に配置される加速度計19は、重力、遠心力、加速力及び減速力による力を測定する。センサの読み取り値から、合成力が第1のシャーシ及び第2のシャーシ間の結合中心を指していないことを示している場合、コンピュータは、センサによって測定された合成力が再び結合中心を指す位置(新しい最適点)へ第2のシャーシが動くことを支援する力を生成するようにシャフトを回転させる。例えば、合成力が結合中心の左を指している場合、シャフトを右に回転して第2のシャーシを右に回転する力を生成する。第2のシャーシが右に回転すると、合成力はより右を指すこととなる。
Claims (17)
- (a)道路によって支持される第1のシャーシと、
(b)運転者を支持すると共に前記第1のシャーシに可動結合するように構成され、前記道路とは機械的に接触しない第2のシャーシと、
(c)車両の動きを制御するように構成された少なくとも1つの機構と
を備えており、
前記第2のシャーシに印加されかつ前記第1のシャーシ及び前記第2のシャーシ間の結合点を向く力の合成ベクトルを前記運転者が維持可能であり、これにより、前記第2のシャーシ及び前記運転者の質量中心の直線的変位の水平成分が求心力、加速力又は減速力の水平成分と同一の方向を向くように、前記機構が、前記第2のシャーシ及び前記運転者の身体の変化位置に非弾性的に反応するように構成されていることを特徴とする運転者によって制御される車両。 - (a)道路によって支持される第1のシャーシと、
(b)運転者を支持すると共に前記第1のシャーシに可動結合するように構成され、前記道路とは機械的に接触しない第2のシャーシと、
(c)車両の動きを制御するように構成された少なくとも1つの機構と
を備えており、
前記機構が、前記第2のシャーシに印加されかつ前記第1のシャーシ及び前記第2のシャーシ間の結合点を向く力の合成ベクトルを前記運転者が維持可能であり、これにより、前記第2のシャーシ及び前記運転者の質量中心の直線的変位の水平成分が求心力、加速力又は減速力の水平成分と同一の方向を向くように構成されていることを特徴とする運転者によって制御される車両。 - 前記第2のシャーシが、前記運転者と置換可能であることを特徴とする請求項1又は2に記載の車両。
- 前記車両の動きが、前記第2のシャーシの位置に従って制御されることを特徴とする請求項1又は2に記載の車両。
- 不安定な車両の動き及び実時間の道路条件における車両グリップの損失を認識するように構成された検知手段を備えたことを特徴とする請求項1又は2に記載の車両。
- 前記制御機構が、ステアリング・ユニットをさらに備えており、前記車両が前記第1のシャーシに対する前記第2のシャーシの角度及び直線的変位とは別個にステアリングを手動制御するように構成されていることを特徴とする請求項1又は2に記載の車両。
- 瞬間的な位置の変化が、前記第1のシャーシに対する前記第2のシャーシ及び前記第2のシャーシに対する前記運転者の身体の角度及び直線的変位によって特徴付けられることを特徴とする請求項1又は2に記載の車両。
- 前記第2のシャーシが、前記第1のシャーシに対する該第2のシャーシの傾きにより、長手方向及び横方向の道路勾配を補償するように構成されていることを特徴とする請求項1又は2に記載の車両。
- 前記第2のシャーシが、該第2のシャーシを所定位置の安定させるように構成されている安定化手段をさらに備えていることを特徴とする請求項1又は2に記載の車両。
- 前記第2のシャーシに印加される力の均衡が、運転方向、速度、加速及び減速を変化させること、前記第1のシャーシに対して前記第2のシャーシの傾けること、前記第2のシャーシの安定化位置を調整すること、並びにこれらの任意の組合せからなる群から選択される車両特性を制御することによってなされるように構成されていることを特徴とする請求項1又は2に記載の車両。
- 前記第2のシャーシに印加される力の均衡が、運転方向、速度、加速及び減速を変化させること、前記第1のシャーシに対して前記第2のシャーシの傾けること、前記第2のシャーシの安定化位置を調整すること、並びにこれらの任意の組合せからなる群から選択される車両特性を制御することによってなされるように前記機構を制御するべくあらかじめプログラムされたコンピュータ手段をさらに備えていることを特徴とする請求項1又は2に記載の車両。
- 前記コンピュータ手段が、前記第2のシャーシのその縦軸に関する角度回転及び前記第1のシャーシに対する横方向の直線的変化によって並びに前記車両の動きの変化によって該車両及びその部分に印加される力に応じて該車両の均衡をとるように構成されていることを特徴とする請求項11に記載の車両。
- 前記コンピュータ手段が、前記車両及びその部分に印加される力に応じて該車両の動きを制御するように構成されていることを特徴とする請求項11に記載の車両。
- 前記車両を均衡させかつ前記運転者の瞬間的な位置に従って前記道路をグリップする位置であって、前記第1のシャーシに対して最適に調整された位置に前記第2のシャーシが安定化されるように前記安定化手段を制御するべくあらかじめプログラムされたコンピュータ手段をさらに備えていることを特徴とする請求項9に記載の車両。
- 前記第1のシャーシ及び前記第2のシャーシを所定の相互位置に固定するように構成された結合部を備えていることを特徴とする請求項1又は2に記載の車両。
- 前記安定化手段が、ジャイロ、実時間調節可能なばね若しくは弾性体、液体シリンダ、摩擦装置、磁気構成要素、及びこれらの任意な組合せからなる群から選択されることを特徴とする請求項9に記載の車両。
- 前記力が、重力、遠心力、加速力、減速力及びこれらの任意の組合せからなる群から選択されることを特徴とする請求項1又は2に記載の車両。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/742,719 US20130131923A1 (en) | 2008-07-01 | 2013-01-16 | Vehicle and method of controlling thereof |
| US13/742,719 | 2013-01-16 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3187004U true JP3187004U (ja) | 2013-11-07 |
Family
ID=48784203
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013002616U Expired - Fee Related JP3187004U (ja) | 2013-01-16 | 2013-05-13 | 運転者によって制御される車両 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP3187004U (ja) |
| DE (1) | DE202013102061U1 (ja) |
| IT (1) | ITMI20130176U1 (ja) |
-
2013
- 2013-05-08 IT IT000176U patent/ITMI20130176U1/it unknown
- 2013-05-12 DE DE202013102061U patent/DE202013102061U1/de not_active Expired - Lifetime
- 2013-05-13 JP JP2013002616U patent/JP3187004U/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE202013102061U1 (de) | 2013-06-07 |
| ITMI20130176U1 (it) | 2014-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108025785B (zh) | 车辆 | |
| US10207762B2 (en) | Mobile body | |
| US8831833B2 (en) | Vehicle | |
| JP5413377B2 (ja) | 車両 | |
| US8225891B2 (en) | Inverted pendulum mobile vehicle | |
| US20130131923A1 (en) | Vehicle and method of controlling thereof | |
| WO2017164342A1 (ja) | 左右傾斜輪付リーン車両用リーン姿勢制御装置および左右傾斜輪付リーン車両 | |
| JP6478743B2 (ja) | 移動体 | |
| CN1918013A (zh) | 多轮辙弯道倾斜车辆以及用于使车辆倾斜的方法 | |
| WO2017183639A1 (ja) | リーン車両 | |
| WO2019245042A1 (ja) | 車両 | |
| JP2012011996A (ja) | 車両 | |
| JP6898428B2 (ja) | 車両 | |
| JP2011230727A (ja) | 車両 | |
| US20110118944A1 (en) | Vehicle and Method of Controlling Thereof | |
| JP2013112238A (ja) | 車両 | |
| JP6277404B2 (ja) | 自動車 | |
| JP2007118807A (ja) | 車両 | |
| CN111278724A (zh) | 车辆 | |
| JP6599110B2 (ja) | 車両 | |
| JP3187004U (ja) | 運転者によって制御される車両 | |
| JP6355380B2 (ja) | 車両用支持具 | |
| WO2019102997A1 (ja) | 車両 | |
| WO2023144922A1 (ja) | 傾斜車両 | |
| WO2024048532A1 (ja) | リーン車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |