JP3179727U - 吸着機能付き手動式昇降機 - Google Patents
吸着機能付き手動式昇降機 Download PDFInfo
- Publication number
- JP3179727U JP3179727U JP2012005392U JP2012005392U JP3179727U JP 3179727 U JP3179727 U JP 3179727U JP 2012005392 U JP2012005392 U JP 2012005392U JP 2012005392 U JP2012005392 U JP 2012005392U JP 3179727 U JP3179727 U JP 3179727U
- Authority
- JP
- Japan
- Prior art keywords
- suction
- lifting
- suction pad
- handle
- lock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000003028 elevating effect Effects 0.000 claims description 16
- 238000001179 sorption measurement Methods 0.000 description 6
- 230000000630 rising effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003584 silencer Effects 0.000 description 1
Images








Landscapes
- Manipulator (AREA)
Abstract
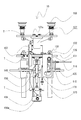
【解決手段】本願考案はローラー搬送台101上に搬送されてくる加工対象物Gを、所定位置において昇降部127が備える吸着パッド105で加工対象物Gの底面を吸引固着し、この昇降部127を上方に移動し、この加工対象物Gをローラー搬送台から離して固定する。この状態において加工対象物に加工等の作業を行う。この一連の動きは、ハンドル113の操作でなされ、このハンドル113を所定量回動させると、このハンドルに固定されたワイヤーWで一連の動きを達成する。この吸着機能付き手動式昇降機10を当初の位置に戻すには、ハンドルレバー113aを把持しつつハンドル113を当初の位置に戻す。
【選択図】図1
Description
この作業を自動化することもできるが、配線、配管、制御盤等を取付けるため、そのためのスペースが必要となる。また、この設備を容易に移動させることはできない。これらを考慮すると、作業の種類によっては、必ずしも自動化がコスト削減につながらない。
(1)上記吸着パッドの吸引力発生手段と、
(2)上記吸着パッドを備えた昇降部の上方移動手段と、
(3)上記昇降部が備える昇降台の上昇端ロック手段と、
(4)上記吸着パッドの吸引力解放手段と、
(5)上記吸着パッドを備えた昇降部の下方移動手段
この上記昇降台の上昇端ロック手段は、昇降台の上昇端ロック機構130からなり、上記昇降台の上昇端ロック機構130はロック部133aを有するL字状切欠き133を備えた昇降ロック板132と、ロックピン131を備えたL型ヒンジ134と、上記ロックピン131を上記昇降ロック板132のロック部133aに導くバネ170とからなり、上述の昇降台126に昇降ロック板132は配設され、一方、ロックピン131を備えたL型ヒンジ134は基台125に取り付けられている。
この上記吸着パッドの吸引力解放手段は、メカニカルバルブ107を用いる。昇降台126に取り付けられたブラケット108は、昇降台126が下方向に移動するときにメカニカルバルブ107の備えるリミット107cを押して、負圧はメカニカルバルブ107の解放口107aにより解放される(図1の要部拡大図参照)。
一方、吸引用シリンダ109の備えるピストン(図示せず)は、昇降台126に固定されているため上方に移動して吸引用シリンダ109は負圧となる。吸引用シリンダ109の備えるエアー配管継ぎ手109a(図1の要部拡大図、図4を参照)は、エアー配管Tで昇降部を介して吸着パッド105でつながっているため、上述の吸着パッド105は負圧となる。このため、吸着パッド105は加工対象物Gの底面を吸着し、吸引力(負圧)は増加し、その後一定の負圧に保持される。
また、昇降台126の上下動は、シャフト123とリニアブッシュ122を使用してスムーズに行われる。
図5は本願吸着機能付き手動式昇降機に係る昇降台の上昇端ロック機構作動説明図である。図5(a)はハンドル113操作をする前の当初の状態を示す。図5(b)はハンドル113操作をした後の昇降台126が上方向に移動したときの状態を示す。
ロックピン131がロック部133aに固定されている状態において作業者は加工対象物Gにバックミラー等の取付け作業を行うことができる。
図8は本願吸着機能付き手動式昇降機10に係る昇降部127の備える回転部106を回転させるときの詳細図ある。この回転部106は筒体がフランジで昇降部127の吸着パッド取り付け台127aに固定され、昇降台126上で回動自在である。筒体はベアリングBで回転し、スペーサー161を設けて回転をスムーズにする。エアー配管継ぎ手106aは吸着パッド105にエアー配管(チュウブ)Tがされている。この筒体の下方には回転エアー配管継ぎ手106bを設けてエアー配管(チュウブ)Tを吸引用シリンダ109のエアー配管継ぎ手109aに接続されている。この回転部106にワンウエイクラッチ160を使用すると作業が容易となるため好ましい。
101 ローラー搬送台
101a ローラー
105 吸着パッド
106 回転部
106a エアー配管継ぎ手
106b 回転エアー配管継ぎ手
109 吸引用シリンダ
109a エアー配管継ぎ手
113 ハンドル
113a ハンドルレバー
120 リンク機構部
120a リンク
120b 支点
122 リニアブッシュ
123 シャフト
125 基台
126 昇降台
127 昇降部
130 昇降台の上昇端ロック機構
131 ロックピン
132 昇降ロック板
133 L字型切欠き
133t 縦部切欠き
133y 横部切欠き
133a ロック部
134 L型ヒンジ
135 ヒンジピン
150 バネ
160 ワンウエイクラッチ
161 スペーサー
170 バネ
B ベアリング
G 加工対象物
P プーリー
T エアー配管
W ワイヤー
Claims (2)
- 搬送台で搬送されてくる加工対象物を、所定位置で上下移動させる吸着機能付き手動式昇降機であって、上記吸着機能付き手動式昇降機は吸着パッドを配設した昇降部を備え、
上記吸着パッドの吸引力発生手段と、
上記吸着パッドを備えた昇降部の上方移動手段と、
上記昇降部が備える昇降台の上昇端ロック手段と
上記吸着パッドの吸引力解放手段と、
上記吸着パッドを備えた昇降部の下方移動手段と、を備え、
上記吸着パッドの吸引力発生手段は吸引用シリンダであり、上記吸引用シリンダの備えるピストンを上記上方移動手段に連結して上記吸引用シリンダ内を負圧にして、上記吸着パッドと配管で連結し吸引力を発生させ、
上記吸着パッドを備えた上記昇降部の上方移動手段はリンク部であって、ワイヤーを備えたハンドルを回転させ、上記ワイヤーはプーリーを介して上記リンク部を構成するリンクの一端を下方向に移動させることにより、中央の支点を中心として他端が上記昇降部を上方に移動させ、上記吸着パッドと加工対象物の底部が接触しつつ、上記吸引力を増加させ、
上記昇降部が備える昇降台の上昇端ロック手段は、上記昇降台の上昇端ロック機構からなり、上記昇降台の上昇端ロック機構はロック部を有するL字状切欠きを備えた昇降ロック板と、ロックピンを備えたL型ヒンジと、上記ロックピンを上記昇降ロック板のロック部に導くためのL型ヒンジの端部に取り付けられて下方向に付勢するバネとからなり、上記昇降部の上方移動にともない上記ロックピンは上記L字状切欠きの縦部切欠きから横部切欠きの先端に設けた上記ロック部に導かれて上記吸着パッドの吸引力は保持され、
上記昇降部の下方移動手段はバネであり、ハンドルレバーを把持しつつ上記ハンドルを当初位置への復帰操作により、上記L型ヒンジに固定された上記ワイヤーが上記ロックピンを上記ロック部から上記縦部切欠きに導き、上記昇降部を下方向に付勢する上記バネで下方移動させ、
上記吸着パッドの吸引力解放手段はメカニカルバルブであり、上記昇降部の下方移動手段の備えるブラケットが上記メカニカルバルブの備えるリミットに接触して上記メカニカルバルブを作動させ、上記吸引用シリンダ内の負圧を大気中に開放し、
上記各手段は上記ハンドル及び上記ハンドルレバーの手動操作により連結作動することを特徴とする吸着機能付き手動式昇降機。 - 上記昇降部は回転部を備え、上記吸着パッドの取り付け台が平面上で回転可能である請求項1に記載の吸着機能付き手動式昇降機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012005392U JP3179727U (ja) | 2012-09-04 | 2012-09-04 | 吸着機能付き手動式昇降機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012005392U JP3179727U (ja) | 2012-09-04 | 2012-09-04 | 吸着機能付き手動式昇降機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3179727U true JP3179727U (ja) | 2012-11-15 |
Family
ID=48006351
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012005392U Expired - Lifetime JP3179727U (ja) | 2012-09-04 | 2012-09-04 | 吸着機能付き手動式昇降機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3179727U (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111409156A (zh) * | 2020-03-17 | 2020-07-14 | 永康市一诺健身器材有限公司 | 用于加工座垫的夹具组件 |
| CN120445697A (zh) * | 2025-07-02 | 2025-08-08 | 日照泓鑫精密配件制造有限公司 | 一种用于汽车零件的自动取样装置 |
-
2012
- 2012-09-04 JP JP2012005392U patent/JP3179727U/ja not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111409156A (zh) * | 2020-03-17 | 2020-07-14 | 永康市一诺健身器材有限公司 | 用于加工座垫的夹具组件 |
| CN120445697A (zh) * | 2025-07-02 | 2025-08-08 | 日照泓鑫精密配件制造有限公司 | 一种用于汽车零件的自动取样装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104798455B (zh) | 电子电路元件安装头 | |
| CN107010422B (zh) | 一种自动化线可调磁力钢板分张装置 | |
| CN106814550B (zh) | 工件台基板交接装置与预对准方法 | |
| US10444287B2 (en) | Robot device, inspection device, inspection device of generator, and inspection method | |
| CN104798454B (zh) | 电子电路元件安装头 | |
| JP6012116B2 (ja) | 部品実装機 | |
| KR20140090934A (ko) | 흡착 반전 장치 | |
| JP2018075979A5 (ja) | ||
| JP3179727U (ja) | 吸着機能付き手動式昇降機 | |
| WO2015063934A1 (ja) | 部品装着機 | |
| KR101066100B1 (ko) | 물류 이송용 핸드 지그 | |
| CN106032215B (zh) | 片材分离辅助装置 | |
| CN104044913B (zh) | 送料装置 | |
| JP2013004678A (ja) | 基板搬送用ハンドおよび基板搬送用ハンドを備えた基板搬送装置 | |
| KR101312495B1 (ko) | 인쇄회로기판 자동 클램프 바스켓 로더 및 언로더용 회전장치 | |
| CN108724150A (zh) | 机器人装置 | |
| CN209774414U (zh) | 柔性键盘固定装置 | |
| CN107345341A (zh) | 一种缝纫机抬压脚结构及缝纫机 | |
| JP2019025501A (ja) | 走行台車 | |
| JP2021146477A (ja) | ロボットハンド | |
| JP5364150B2 (ja) | 部品移送装置 | |
| JP2020061400A (ja) | 基板保持装置 | |
| JP2020015445A (ja) | ハンドリフト | |
| JP5655177B1 (ja) | 露光装置 | |
| CN106894172B (zh) | 一种缝纫机面料夹持装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3179727 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151024 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |