JP2025035178A - 画像形成装置および画像形成装置の制御方法 - Google Patents
画像形成装置および画像形成装置の制御方法 Download PDFInfo
- Publication number
- JP2025035178A JP2025035178A JP2023142053A JP2023142053A JP2025035178A JP 2025035178 A JP2025035178 A JP 2025035178A JP 2023142053 A JP2023142053 A JP 2023142053A JP 2023142053 A JP2023142053 A JP 2023142053A JP 2025035178 A JP2025035178 A JP 2025035178A
- Authority
- JP
- Japan
- Prior art keywords
- image
- image carrier
- image forming
- predetermined
- storage chamber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Cleaning In Electrography (AREA)
- Control Or Security For Electrophotography (AREA)
Abstract

【課題】 画像形成処理が行われた後、しばらく画像形成処理が行われずに画像形成装置が放置された場合に、感光体ドラムなどの像担持体の回転方向において、当該像担持体の表面の電気的特性に差異が生ずるのを防止する。
【解決手段】 本発明に係る画像形成装置(10)の環境対策動作によれば、画像形成処理などの通常動作が行われた後に、当該通常動作が終了した時点から所定の待機時間Taが経過するまでの間に、当該通常動作が行われない場合であって、外気の温度(θ)が所定の温度閾値(θth)以下であり、かつ、当該外気の絶対湿度(ρ)が所定の湿度閾値(ρth)以下である場合に、感光体ドラム42の表面が所定の第1距離La移動するように、当該感光体ドラム42が回転駆動される。
【選択図】 図9
【解決手段】 本発明に係る画像形成装置(10)の環境対策動作によれば、画像形成処理などの通常動作が行われた後に、当該通常動作が終了した時点から所定の待機時間Taが経過するまでの間に、当該通常動作が行われない場合であって、外気の温度(θ)が所定の温度閾値(θth)以下であり、かつ、当該外気の絶対湿度(ρ)が所定の湿度閾値(ρth)以下である場合に、感光体ドラム42の表面が所定の第1距離La移動するように、当該感光体ドラム42が回転駆動される。
【選択図】 図9
Description
本開示は、画像形成装置および画像形成装置の制御方法に関し、特に、電子写真方式の画像形成装置および画像形成装置の制御方法に関する。
この種の画像形成装置は、像担持体としての感光体ドラムを有する。この感光体ドラムの表面の帯電特性などの電気的特性は、当該感光体ドラムの周囲の温湿度の影響を受け、つまり温湿度依存性を有する。これに対処するための技術の一例が、特許文献1に開示されている。この特許文献1に開示された技術によれば、感光体ドラムの周囲の温湿度などに関する情報に応じて、画像形成処理の条件が制御される。
ところで、感光体ドラムの表面には、トナー画像が形成され、このトナー画像は、用紙などのシート状の画像記録媒体に転写され、その後、感光体ドラムの表面が、クリーニング装置によってクリーニングされる。クリーニング装置は、感光体ドラムの表面に接触するように設けられ、当該感光体ドラムの表面に付着している残留トナーを含む付着物を除去するための清掃部材としてのクリーニングブレード、このクリーニングブレードによって除去された付着物を収容するための収容室、この収容室に収容された付着物を付着物回収容器へ搬送するための搬送部材などを有する。特に、収容室は、感光体ドラムの回転軸方向に沿って延伸する細長い空間であり、感光体ドラムの回転軸方向に沿って延伸する開口部を有する。この開口部は、感光体ドラムの表面に面した状態にあり、クリーニングブレードによって除去された付着物は、当該開口部を介して収容室に収容される。また、開口部は、収容室内の付着物が当該開口部を介して外部へ飛散するのを防止するために、感光体ドラムの表面に接触するように設けられたシート状の封止部材と、クリーニングブレードと、によって封止された状態にある。ゆえに、収容室は、簡易的に(軽く)密閉された状態にあり、言わば略密閉空間である。
ここで一般に、画像形成装置の内部空間である機内空間には、外気が自然にまたは強制的に取り込まれる。その上でたとえば、画像形成装置による画像形成処理が行われた後、しばらく画像形成処理が行われずに当該画像形成装置が放置される、とする。この場合、機内空間の温湿度は、厳密には収容室を除く当該機内空間の温湿度は、比較的に短時間で外気の温湿度と近い状態になる。これに対して、収容室は、前述の如く略密閉空間であるため、当該収容室の温湿度が外気の温湿度と近い状態になるのには、相応の時間が掛かる。したがって、画像形成処理が行われた(終了した)後、しばらくの間は、収容室の温湿度と、当該収容室を除く機内空間の温湿度とが、互いに乖離した状態にある。また、画像形成処理が行われないときには、感光体ドラムは回転しないので、当該感光体ドラムの表面の一部は、略密閉空間である収容室に面した状態にあり、そうでない部分は、収容室を除く機内空間に面した(露出した)状態にある。このため、感光体ドラムの回転(円周)方向において、当該感光体ドラムの表面のシーズニング(周囲の環境への馴染み)状況に差異が生じ、ひいては当該感光体ドラムの表面の電気的特性に差異が生ずる。この状態で、改めて画像形成処理が行われると、感光体ドラムの表面に形成されるトナー画像に濃度ムラが生じ、この濃度ムラは当然に、当該画像形成処理によって最終的に形成されるいわゆる出力画像にも現れる。この不都合は、外気の温湿度が低いほど生じ易い。
そこで、本開示は、画像形成処理が行われた後、厳密には画像形成処理を含め、感光体ドラムなどの像担持体の回転駆動を伴う所定動作が行われた後、しばらく当該所定動作が行われずに画像形成装置が放置された場合に、像担持体の回転方向において、当該像担持体の表面の電気的特性に差異が生ずるのを防止することができる、新規な画像形成装置および画像形成装置の制御方法を提供することを、目的とする。
この目的を達成するために、本開示は、画像形成装置に係る第1の開示、および、画像形成装置の制御方法に係る第2の開示を含む。
このうちの画像形成装置に係る第1の開示は、当該画像形成装置が電子写真方式の装置であることを前提とし、この前提の下、画像形成手段、清掃部材、収容室、環境検出手段および制御手段を備える。画像形成手段は、所定の方向へ回転駆動される像担持体を含み、当該像担持体の表面にトナー像を形成するとともに、当該像担持体の表面に形成されたトナー像をシート状の画像記録媒体に転写する。そして、清掃部材は、像担持体の表面に接触し、トナー像が画像記録媒体に転写された後の当該像担持体の表面に付着している付着物を除去する。収容室は、清掃部材により除去された付着物を収容する空間であって、像担持体の回転軸方向に沿って延伸する開口部を有する。この開口部は、像担持体の表面に面しており、清掃部材によって除去された付着物は、当該開口部を介して収容部に収容される。また、開口部は、清掃部材と像担持体の表面に接触するシート状の封止部材とによって封止された状態にある。したがって、収容室は、簡易的に密閉された状態にあり、言わば略密閉空間である。環境検出手段は、収容室の外側の、たとえば画像形成装置の外側の、温度と相対湿度とを検出する。そして、制御手段は、像担持体の回転駆動を伴う所定動作が行われた後に、換言すれば当該所定動作が終了した後に、環境検出手段による検出結果が所定条件を満足し、かつ、当該所定動作が終了した時点から所定の第1時間が経過するまでの間に当該所定動作が行われなかった場合に、第1制御処理を行う。この第1制御処理においては、像担持体の回転方向へ当該像担持体の表面が所定の第1距離移動するように、当該像担持体が回転駆動される。
なお、制御手段は、第1制御処理が終了した時点から所定の第2時間が経過するまでの間に所定動作が行われなかった場合に、再び当該第1制御処理を行う再制御処理を、当該所定動作が行われない限り、所定回数にわたって繰り返してもよい。
また、収容部は、搬送部材を備えてもよい。この搬送部材は、収容室に収容された付着物を付着物回収容器へ搬送する。そして、制御手段は、前述の再制御処理を所定回数にわたって繰り返した後に、所定の第3時間が経過しても所定動作が行われない場合は、第2制御処理を行ってもよい。この第2制御処理においては、収容室に収容された付着物が搬送部材により付着物回収容器へ搬送される。
さらに、収容室は、搬送部材によって搬送される付着物を付着物回収容器へ排出する排出口と、当該排出口を開閉する開閉部材と、を備えてもよい。この場合、制御手段は、第2制御処理を行うまでは、開閉部材を開放状態とし、当該第2制御処理を行った後に、開閉部材を閉鎖状態とするのが、望ましい。
加えて、制御手段は、開閉部材を閉鎖状態とした時点から所定の第4時間が経過する前の間に、依然として前記前述の所定動作が行われない場合には、第3制御処理を行ってもよい。この第3制御処理においては、像担持体の回転方向へ当該像担持体の表面が所定の第2距離移動するように、当該像担持体が回転駆動される。
本第1の開示における所定条件は、たとえば環境検出手段によって検出された温度と相対湿度とから導出される絶対湿度が所定の湿度閾値以下であること、および、当該温度が所定の温度閾値以下であることを含む。
ここで言う温度閾値は、たとえば10℃であり、湿度閾値は、たとえば1g/m3である。
そして、第1距離は、少なくとも像担持体の回転方向における収容室の開口部の寸法よりも大きい。
本開示のうちの画像形成装置の制御方法に係る第2の開示は、当該画像形成装置が電子写真方式の装置であることを前提とする。ここで、画像形成装置は、画像形成手段、清掃部材、収容室および環境検出手段を備える。画像形成手段は、所定の方向へ回転駆動される像担持体を含み、当該像担持体の表面にトナー像を形成するとともに、当該像担持体の表面に形成されたトナー像をシート状の画像記録媒体に転写する。そして、清掃部材は、像担持体の表面に接触し、トナー像が画像記録媒体に転写された後の当該像担持体の表面に付着している付着物を除去する。収容室は、清掃部材により除去された付着物を収容する空間であって、像担持体の回転軸方向に沿って延伸する開口部を有する。この開口部は、像担持体の表面に面しており、清掃部材によって除去された付着物は、当該開口部を介して収容部に収容される。また、開口部は、清掃部材と像担持体の表面に接触するシート状の封止部材とによって封止された状態にある。したがって、収容室は、簡易的に密閉された状態にあり、言わば略密閉空間である。環境検出手段は、収容室の外側の、たとえば画像形成装置の外側の、温度と相対湿度とを検出する。その上で、本第2の開示は、制御ステップを含む。この制御ステップでは、像担持体の回転駆動を伴う所定動作が行われた後に、換言すれば当該所定動作が終了した後に、環境検出手段による検出結果が所定条件を満足し、かつ、当該所定動作が終了した時点から所定の第1時間が経過するまでの間に当該所定動作が行われなかった場合に、第1制御処理を行う。この第1制御処理においては、像担持体の回転方向へ当該像担持体の表面が所定の第1距離移動するように、当該像担持体が回転駆動される。
本開示によれば、像担持体の回転駆動を伴う所定動作が行われた後、しばらく当該所定動作が行われずに画像形成装置が放置された場合に、像担持体の回転方向において、当該像担持体の表面の電気的特性に差異が生ずるのを防止することができる。
[第1実施例]
本開示の第1実施例について、図1に示される画像形成装置10を例に挙げて説明する。
本開示の第1実施例について、図1に示される画像形成装置10を例に挙げて説明する。
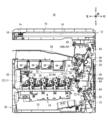
本第1実施例に係る画像形成装置10は、コピー機能、プリンタ機能、イメージスキャナ機能、ファクス機能などの複数の機能を有する、いわゆる複合機(MFP)である。なお、図1は、使用可能な状態に設置された画像形成装置10の内部の構成を当該画像形成装置10の前方側から見た図である。すなわち、図1における上下方向は、画像形成装置10の上下方向に対応する。そして、図1における左右方向は、画像形成装置10の左右方向に対応する。さらに、図1の紙面の手前側は、画像形成装置10の前方に対応する。そして、図1の紙面の奥側は、画像形成装置10の後方に対応する。
この画像形成装置10の上部には、画像読取手段としての画像読取部12が設けられる。画像読取部12は、不図示の原稿の画像を読み取って、当該原稿の画像に応じた2次元の読取画像データを出力する、画像読取処理を担う。このため、画像読取部12は、原稿が載置される原稿台14を有する。原稿台14は、概略矩形平板状のガラスなどの透明部材により形成され、その両主面を水平方向に沿わせるように設けられる。そして、原稿台14の下方に、画像読取ユニット16が設けられる。詳しい説明は省略するが、画像読取ユニット16は、光源、ミラー、レンズ、ラインセンサなどを有し、画像形成装置10の前後方向に沿って延伸する直線状の画像読取部Prを形成する。さらに、原稿台14の下方には、画像読取ユニット16の画像読取部Prを画像形成装置10の左右方向に沿って移動(走査)させるための不図示の駆動機構が設けられる。すなわち、原稿台14に原稿が載置された状態で、画像読取ユニット16の画像読取部Prが駆動機構により移動されることで、当該原稿の画像が読み取られる。また、原稿台14の上方には、当該原稿台14に載置された原稿を押さえるための原稿押さえカバー18が設けられる。なお、画像形成装置10の前後方向は、主走査方向と呼ばれる。そして、画像形成装置10の左右方向は、副走査方向と呼ばれる。
画像読取部12の下方には、画像形成手段の一例としての画像形成部20が設けられる。この画像形成部20は、不図示のシート状の画像記録媒体、たとえば用紙に、前述の読取画像データなどの適宜の画像データに基づく画像を形成する画像形成処理(印刷処理)を担う。この画像形成処理は、公知の電子写真方式により行われる。また、画像形成部20は、カラーの画像形成処理を行うために、タンデム方式を採用する。
具体的には、画像形成部20は、互いに異なる複数の色、たとえばイエロー(Y)、マゼンタ(M)、シアン(C)およびブラック(K)という4つの色の、単色トナー画像を個別に形成するための4つの単色画像形成手段としての画像形成ステーション(「プロセスユニット」と呼ばれることもある。)22,22,…を有する。併せて、画像形成部20は、各画像形成ステーション22,22,…による単色トナー画像の形成に必要な露光を行う露光手段としての露光装置24を有する。さらに、画像形成部20は、各画像形成ステーション22,22,…により形成された各単色トナー画像を後述する中間転写ベルト32上に順次転写し、中間転写ベルト32上に転写されたトナー画像を用紙(シート)上に転写するための転写手段としての転写ユニット26を有する。加えて、画像形成部20は、用紙上に転写されたトナー画像を当該用紙上に定着させるための定着手段としての定着装置28を有する。
まず、転写ユニット26について、詳しく説明する。転写ユニット26は、中間転写ベルト(「1次転写ベルト」と呼ばれることもある。)32、中間転写ベルト32を回転させる駆動ローラ34、駆動ローラ34とともに中間転写ベルト32を張架する従動ローラ36、中間転写ベルト32の内側における各画像形成ステーション22,22,…と対応する位置に設けられた4つの中間転写ローラ(「1次転写ローラ」と呼ばれることもある。)38,38,…、転写ローラ40(「2次転写ローラ」と呼ばれることもある。)などを有する。
中間転写ベルト32は、駆動ローラ34および従動ローラ36によって張架される。駆動ローラ34は、不図示のベルト用駆動手段としてのベルト用モータからの駆動力を受けて回転し、たとえば図1において反時計回りに回転する。これに伴い、中間転写ベルト32が周回移動(走行)するとともに、従動ローラ36が回転する。中間転写ベルト32における駆動ローラ34と従動ローラ36との間の領域のうちの下方の領域32aは、水平方向に沿って張架されており、この水平方向に沿って張架された領域32aと対向するように、各画像形成ステーション22,22…が配置される。この中間転写ベルト32における各画像形成ステーション22,22…が配置された領域32aは、中間転写領域と呼ばれる。この中間転写領域32aにおいては、中間転写ベルト32は、画像形成装置10の左側から右側へ向かって移動し、つまり副走査方向に沿って移動する。
なお、中間転写ベルト32は、可撓性を持つ無端帯状体であり、カーボンブラックなどの導電性材料が適宜に配合された合成樹脂(たとえばポリイミドあるいはポリカーボネート)製である。また、詳しい説明は省略するが、従動ローラ36は、中間転写ベルト32に適宜の張力を付与することにより、当該中間転写ベルト32の弛みを防止する機能を兼ね備える。
各画像形成ステーション22,22,…は、中間転写ベルト32の中間転写領域32aの下方において、当該中間転写領域32aにおける中間転写ベルト32の移動方向に沿って、つまり副走査方向に沿って、一定の間隔を置いて設けられる。前述したように、これら各画像形成ステーション22,22,…は、イエロー、マゼンタ、シアンおよびブラックという4つの色の単色トナー画像を中間転写ベルト32上に個別に形成する。ここで、各画像形成ステーション22,22,…は、中間転写領域32aにおける中間転写ベルト32の移動方向の上流側から下流側へ向かって(図1における左側から右側へ向かって)、イエロー用、マゼンタ用、シアン用およびブラック用の順番で設けられる。なお、各画像形成ステーション22,22,…の並び順は、これに限らない。また、各画像形成ステーション22,22,…は、互いに異なる色の単色トナー画像を中間転写ベルト32上に形成する以外は、互いに同じ構造である。
図2を併せて参照して、それぞれの画像形成ステーション22(図2においては、ブラック用の画像形成ステーション22(K))は、像担持体の一例としての感光体ドラム42、帯電手段としての帯電装置44、現像手段としての現像装置46、クリーニング手段としてのクリーニング装置48、除電手段としての不図示の除電装置などを有する。
感光体ドラム42は、アルミニウムなどの導電性材料により形成された円筒状の導電性部材である基体を有する。この基体の表面(外周面)には、感光層が形成される。感光層は、光が照射された部分については、導電性を示し、光が照射されていない部分については、絶縁性を示す。そして、感光体ドラム42は、基体の表面を中間転写ベルト32の外側面に当接させるように設けられる。その上で、感光体ドラム42は、ドラム用駆動手段としてのドラム用モータ43(図00参照)からの駆動力を受けて回転し、たとえば図2において時計回りに回転する。なお、感光体ドラム42は、中間転写ベルト32の移動速度に合わせた速度で回転し、厳密には基体の表面の周速度が中間転写ベルト32の移動速度よりも僅かに、たとえば0.1%~0.3%ほど、低い速度で回転する。これは、感光体ドラム42の表面に形成(担持)された単色トナー画像が中間転写ベルト32の外側面に転写され易くするためであり、換言すれば当該単色トナー画像が感光体ドラム42の表面から中間転写ベルト32の外側面に転写されない現象、たとえば文字の中抜け現象を、防止するためである。
帯電装置44は、帯電ローラ50を有し、当該帯電ローラ50による接触式帯電方式により感光体ドラム42の表面を所定の電位に帯電させる。すなわち、帯電ローラ50は、自身の表面を感光体ドラム42の表面に当接させた状態で設けられ、不図示の帯電ローラ用駆動力伝達手段としての適当なギアを介して、前述のドラム用モータ43からの駆動力を受けて回転し、詳しくは感光体ドラム42の回転方向とは逆方向へ回転し、つまり図2において反時計回りに回転する。そして、帯電ローラ50は、不図示の帯電用電源から帯電バイアスの供給を受けることで、感光体ドラム42の表面を所定の電位に帯電させる。なお、帯電ローラ50は、帯電ローラ用駆動力伝達手段を介しての駆動力を受けて回転するのではなく、感光体ドラム42と当接することによる駆動力を受けて従動回転するように構成されてもよい。
この帯電装置44により帯電された感光体ドラム42の表面に対して、露光装置24による露光が行われる。すなわち、露光装置24は、感光体ドラム42の表面に対して、画像形成処理に供される画像データに応じた態様の光を照射する。これにより、画像形成処理に供される画像データに応じた態様の静電潜像が感光体ドラム42の表面に形成される。なお、露光装置24は、光源としての不図示のレーザダイオードや、偏向手段としてのポリゴンミラーなどを有するレーザスキャニングユニットであり、各画像形成ステーション22,22,…の並びの下方に設けられる。そして、露光装置24は、それぞれの画像形成ステーション22の感光体ドラム42の表面に対して、たとえば下方からレーザ光を照射する。この露光装置24として、レーザスキャニングユニットではなく、光源としてLEDが並べられたLEDアレイを有するLEDユニットが採用されてもよい。
このようにして静電潜像が形成された感光体ドラム42の表面に対して、現像装置46による現像が行われる。すなわち、現像装置46は、感光体ドラム42の表面電位と同極性に帯電された不図示のトナーを当該感光体ドラム42の表面に形成された静電潜像に付着させることで、当該静電潜像を単色トナー画像に顕像化する。このため、現像装置46は、当該現像装置46内のトナーを含む不図示の現像剤を撹拌しながら搬送することで当該現像剤を帯電させる撹拌搬送部材52、帯電された現像剤を感光体ドラム42の表面近傍に搬送する現像ローラ54などを有する。なお、現像ローラ54は、不図示の現像ローラ用駆動力伝達手段としての適当なギアを介して、前述のドラム用モータ43からの駆動力を受けて回転し、詳しくは感光体ドラム42の回転方向とは逆方向へ回転し、つまり図2において反時計回りに回転する。併せて、現像ローラ54には、不図示の現像バイアス電源から適当な現像バイアスが供給される。また、撹拌搬送部材52は、いわゆるオーガスクリューであり、不図示の撹拌部材用駆動力伝達手段としての適当なギアを介して、前述のドラム用モータ43からの駆動力を受けて適当な方向へ回転する。ここで言う現像剤は、たとえば2成分系のものであるが、1成分系のものであってもよい。
この現像装置46による現像により顕像化された単色トナー画像は、感光体ドラム42の表面と中間転写ベルト32の外側面との当接位置において、当該感光体ドラム42の表面から中間転写ベルト32の外側面に中間転写ローラ38によって中間転写(1次転写)される。
各中間転写ローラ38,38,…は、各画像形成ステーション22,22,…に対応して設けられており、それぞれの中間転写ローラ38は、中間転写領域32aにおいて、中間転写ベルト32を挟んで自身に対応する画像形成ステーション22の感光体ドラム42と対向するように設けられる。また、それぞれの中間転写ローラ38は、自身の表面(外周面)を中間転写ベルト32の内側面に当接させるように設けられる。そして、それぞれの中間転写ローラ38は、中間転写ベルト32が周回移動することによる駆動力を受けて回転し、たとえば図2において反時計回りに回転する。その上で、それぞれの中間転写ローラ38に不図示の中間転写電源から所定の中間転写バイアスが印加される。これにより、中間転写ローラ38から中間転写ベルト32に静電気が付与され、感光体ドラム42の表面と中間転写ベルト32の外側面との間に転写電界が形成される。この転写電界の作用により、感光体ドラム42の表面から中間転写ベルト32の外側面に単色トナー画像が転写される。
その結果、中間転写ベルト32上にイエロー、マゼンタ、シアンおよびブラックという4つの色の単色トナー画像が個別に形成される。これら4つの色の単色トナー画像が互いに重なり合うことで、中間転写ベルト32上にカラーのトナー画像が形成される。
このようにしてそれぞれの画像形成ステーション22の感光体ドラム42の表面から中間転写ベルト32上に単色トナー画像が転写された後、当該感光体ドラム42の表面がクリーニング装置48によってクリーニングされる。このクリーニング装置48については、後で詳しく説明する。
このクリーニング装置48によってクリーニングされた後の感光体ドラム42の表面は、不図示の除電装置により除電され、静電潜像形成時に感光体ドラム42の表面に形成された電位分布が消去される。その上で、帯電装置44による帯電以降の工程が繰り返される。
中間転写ベルト32上に形成されたカラーのトナー画像は、当該中間転写ベルト32と転写ローラ40との当接部分である転写ニップ部において、用紙に転写される。具体的には、転写ローラ40は、駆動ローラ34上の中間転写ベルト32と当接するように設けられる。また、転写ローラ40は、中間転写ベルト32が周回移動することによる駆動力を受けて回転し、たとえば図2において時計回りに回転する。その上で、転写ローラ40に不図示の転写電源からトナーの帯電極性とは逆極性の所定の転写バイアスが供給される。これにより、中間転写ベルト32と転写ローラ40との間に転写電界が形成される。この状態で、中間転写ベルト32と転写ローラ40との間の転写ニップ部を用紙が通過すると、中間転写ベルト32上に形成されたトナー画像が当該用紙に転写される。
改めて図1に注目して、画像形成装置10の内部には、後述する給紙部56から前述の転写ニップ部を介して排紙トレイ58への排紙口60へ至る用紙(シート)搬送路62が設けられる。そして、用紙搬送路62の適宜の位置には、給紙部56から排紙口60へ向けて当該用紙搬送路62に沿って用紙を搬送させるための複数の搬送ローラ(厳密にはローラ対)64,64,…が設けられる。なお、各搬送ローラ64,64,…のうち、用紙搬送路62における用紙の搬送方向の転写ニップ部よりも上流側であって、当該転写ニップ部に最も近い位置に設けられた搬送ローラ64aは、用紙を転写ニップ部に突入させるタイミングを計るためのレジストローラ(「ペーパストップローラ」と呼ばれることもある。)である。また、各搬送ローラ64,64,…のうち、用紙搬送路62における用紙の搬送方向の最下流側に設けられた、つまり排紙口60の近傍に設けられた、搬送ローラ64bは、当該排紙口60を介して排紙トレイ58へ用紙を排出するための排紙ローラである。
そして、用紙搬送路62における転写ニップ部と排紙口60との間の適当な位置に、換言すれば用紙搬送路62における用紙の搬送方向の転写ニップ部よりも下流側の位置に、定着装置28が設けられる。この定着装置28は、ヒートローラ66および加圧ローラ68を有する。これらヒートローラ66および加圧ローラ68は、互いの表面(外周面)を密着させるように設けられる。そして、ヒートローラ66は、所定の温度(定着温度)に加熱される。併せて、ヒートローラ66は、不図示の定着ローラ用駆動手段としての定着用モータからの駆動力を受けて回転し、たとえば図1において反時計回りに回転する。これに伴い、加圧ローラ68もまた回転し、つまり図1において時計回りに回転する。そして、転写ニップ部を通過した用紙は、ヒートローラ66と加圧ローラ68との当接部分である定着ニップ部を通過する。これにより、用紙上のトナー画像が当該用紙上に定着される。これをもって、画像形成部20による一連の画像形成処理が終了する。
この画像形成処理が施された後の用紙(印刷物)は、排紙口60を介して排紙トレイ58へ排出される。なお、排紙トレイ58は、画像形成部20と画像読取部12との間に設けられ、いわゆる画像形成装置10の胴内空間に設けられる。また、排紙トレイ58は、画像形成装置10の外側に設けられてもよい。
さらに、画像形成装置10内の下部に、給紙手段としての給紙部56が設けられる。給紙部56は、給紙カセット70を有し、この給紙カセット70には、複数枚の用紙(シート)が積層状に収容可能である。併せて、給紙部56は、ピックアップローラ72を有する。そして、給紙部56は、給紙カセット70に収容された用紙をピックアップローラ72により1枚単位で取り出し、用紙搬送路62へ供給する。
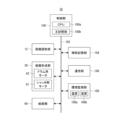
図3は、画像形成装置10の電気的な構成を示すブロック図である。この図3に示されるように、画像形成装置10は、制御部100を有する。そして、制御部100に、バス102を介して、画像読取部12、画像形成部20および給紙部56が接続される。また、制御部100には、バス102を介して、補助記憶部104、通信部106、環境検出部108などが接続される。なお、画像形成装置10は、これら以外にも、不図示の操作ユニットなどの種々の要素を備えるが、ここでは、当該操作ユニットを含め、本開示の本旨に直接的に関係しない要素についての図示および説明を省略する。また、画像読取部12、画像形成部20および給紙部56については、前述した通りある。特に、画像形成部20は、ドラム用モータ43を有する。このドラム用モータ43は、たとえばステッピングモータであるが、これに限らない。
制御部100は、画像形成装置10全体の制御を司る、制御手段の一例である。このため、制御部100は、制御実行手段としてのコンピュータ、たとえばCPU100a、を有する。併せて、制御部100は、CPU100aが直接的にアクセス可能な主記憶手段としての主記憶部100bを有する。主記憶部100bは、たとえば不図示のROMおよびRAMを含む。このうちのROMには、CPU100aの動作を制御するための制御プログラム(ファームウェア)が記憶される。そして、RAMは、CPU100aが制御プログラムに従う処理を実行する際の作業領域およびバッファ領域を構成する。
補助記憶部104は、補助記憶手段の一例である。すなわち、補助記憶部104には、前述の読取画像データなどの種々のデータが適宜に記憶される。この補助記憶部104は、たとえば不図示のハードディスクドライブを有する。併せて、補助記憶部104は、フラッシュメモリなどの書き換え可能な不揮発性メモリを有する場合がある。
通信部106は、通信手段の一例である。すなわち、通信部106は、不図示のLAN回線を介しての双方向の通信処理を担う。なお、通信部106は、LAN回線と有線により接続されてもよいし、無線により接続されてもよい。また、通信部106は、不図示の公衆交換電話網を介しての双方向の通信処理をも担う。
環境検出部108は、画像形成装置10が設置された場所における環境要素を検出する環境検出手段の一例である。この環境検出部108は、温度検出手段としての温度センサ108aと、相対湿度検出手段としての湿度センサ108bと、を有する。温度センサ108aは、たとえば画像形成装置10の外部に設けられ、詳しくは当該画像形成装置10の筐体の側面に設けられる。そして、温度センサ108aは、環境要素の1つとしての外気の温度θを検出する。また、湿度センサ108bも同様に、たとえば画像形成装置10の外部に設けられ、詳しくは当該画像形成装置10の筐体の側面に設けられる。そして、湿度センサ108bは、別の環境要素としての外気の相対湿度φを検出する。なお、温度センサ108aは、画像形成装置10の外部ではなく、画像形成装置10の内部の適宜の位置に設けられてもよい。また、湿度センサ108bも同様に、画像形成装置10の内部の適宜の位置に設けられてもよい。これら温度センサ108aおよび湿度センサ108bは、互いに近い(略同じ)位置に設けられるのが好ましいが、互いに離れた位置に設けられてもよいし、さらには、それぞれ複数の位置に設けられてもよい。
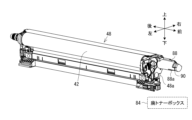
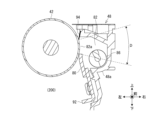
さて、図4~図6を参照して、感光体ドラム42の表面をクリーニングするクリーニング装置48について、詳しく説明する。なお、図4は、画像形成ステーション22のうちの感光体ドラム42およびクリーニング装置48を含む部分の斜視図である。そして、図5は、図4に示される構成から感光体ドラム42が取り除かれた構成の斜視図である。また、図6は、感光体ドラムおよびクリーニング装置を含む部分の内部の構成を概略的に示す図であり、詳しくは図4に示される構成の前後方向における中央部付近の当該前後方向に直交する平面による切断面を示す図(端面図)である。
クリーニング装置48は、感光体ドラム42の表面に当接し、感光体ドラム42の表面に残留している残留トナーを掻き落すクリーニングブレード80、このクリーニングブレード80によって掻き落されたトナー(廃トナー)を一時的に収容するための収容室82、この収容室82に一時的に収容された廃トナーを画像形成装置10に設けられた廃トナーボックス84への排出口88bへ搬送するための搬送部材86などを有する。廃トナーボックス84については、図4および図5に簡略的に示しているが、この廃トナーボックス84は、画像形成装置10に設けられた不図示の装着部に対して着脱可能である。この装着部に廃トナーボックス84が装着されると、当該廃トナーボックス84は、収容室82の前方側端部に設けられた排出部88の排出口88bに結合される。また、排出部88には、排出口88bを開閉する開閉部材の一例としてのシャッタ90が設けられる。このシャッタ90は、廃トナーボックス84が装着部に装着されたときに開放状態となり、当該廃トナーボックス84が装着部から取り外されたときに閉鎖状態となるように、機械的に構成される。
クリーニングブレード80は、ウレタンゴムなどの適度な弾性と適度な剛性とを併せ持つ素材により形成された厚さ寸法が約2mmの細長い板状体である。このクリーニングブレード80は、その長手方向を感光体ドラム42の回転軸方向に沿わせるとともに、当該長手方向に沿う一方側縁を感光体ドラム42の回転方向に対向する方向(カウンタ方向)へ向けた状態で、当該一方側縁を感光体ドラム42の表面に対して斜めに当接させるように設けられ、他方側縁側は、金属製の支持部材92を介してクリーニング装置48の筐体48aに固定される。このクリーニングブレード80によって、厳密には当該クリーニングブレード80の一方側縁によって、感光体ドラム42の表面の残留トナーが掻き落とされる。すなわち、クリーニングブレード80は、感光体ドラム42の表面に接触し、感光体ドラム42の表面に形成された単色トナー画像が中間転写ベルト32に転写された後の感光体ドラム42の表面に付着している付着物を除去する、清掃部材の一例である。
収容室82は、感光体ドラム42の回転軸方向に沿って延伸する細長い空間である。この収容室82は、感光体ドラム42の回転軸方向に沿って延伸する開口部82aを有し、当該開口部82aは、感光体ドラム42の表面に面した状態にある。そして、クリーニングブレード80によって感光体ドラム42の表面から掻き落とされた廃トナーを含む付着物は、開口部82aを介して収容室82に収容される。
また、収容室82に収容された付着物が当該収容室82(クリーニング装置48)の外部に飛散するのを防止するために、封止部材94が設けられる。この封止部材94は、PETなどの適度な柔軟性と適度な剛性とを併せ持つ素材により形成された厚さ寸法が約0.1mmの細長いシート状の部材である。この封止部材94は、その長手方向を感光体ドラム42の回転軸方向に沿わせるとともに、当該長手方向に沿う一方側縁を感光体ドラム42の回転方向に倣う方向(フォロー方向)へ向けた状態で、当該一方側縁を感光体ドラム42の表面に対して斜めに当接させるように設けられ、他方側縁側は、両面テープなどの適当な貼着手段によりクリーニング装置48の筐体48aに固定される。この封止部材94の一方側縁と、クリーニングブレード80の一方側縁と、の間には、適当な距離Dが設けられ、この距離Dが設けられた部分が、開口部82aに当たる。すなわち、開口部82aは、クリーニングブレード80と封止部材94とによって(厳密にはこれに加えて後述する間隙封止スポンジ96および98によって)、封止された状態にある。
さらに、開口部82aの前方側端部および後方側端部には、これらの端部における感光体ドラム42との間の間隙を塞ぐための間隙封止部材としての間隙封止スポンジ96および98が設けられる。ゆえに、収容室82は、簡易的に密閉された空間であり、言わば略密閉空間である。
なお、感光体ドラム42の直径(外径)は、たとえば30mmである。そして、感光体ドラム42の回転方向における開口部82aの寸法D、換言すれば感光体ドラム42の表面のうちの開口部82aを覆った部分の当該感光体ドラム42の回転方向における寸法Dは、たとえば約5mmである。
搬送部材86は、オーガスクリューであり、感光体ドラム42の回転軸方向に沿って延伸するように設けられる。この搬送部材86は、不図示の排出部材用駆動力伝達手段としての適当なギアを介して、前述のドラム用モータ43からの駆動力を受けて回転し、詳しくは収容室82内の廃トナーを前方側へ搬送するように回転する。この排出部材86によって搬送された廃トナーは、排出部88の排出口88aを介して廃トナーボックス84へ排出される。
ここで、画像形成装置10の筐体の適宜の位置には、不図示の通気口が設けられ、この通気口を介して画像形成装置10の内部空間である機内空間200に外気が自然にまたは不図示のファンにより強制的に取り込まれる。
その上でたとえば、画像形成処理が行われた後、しばらく画像形成処理が行われずに画像形成装置10が放置される、とする。この場合、機内空間200の温湿度は、厳密には収容室82を除く当該機内空間200の温湿度は、比較的に短時間で外気の温湿度θおよびφと近い状態になる。これに対して、収容室82は、前述の如く略密閉空間であるため、当該収容室82の温湿度が外気の温湿度θおよびφと近い状態になるのには、相応の時間が掛かる。したがって、画像形成処理が行われた(終了した)後、しばらくの間は、収容室82の温湿度と、当該収容室82を除く機内空間200の温湿度とが、互いに乖離した状態にある。また、画像形成処理が行われないときには、感光体ドラム42は回転しないので、当該感光体ドラム42の表面の一部は、略密閉空間である収容室82に面した状態にあり、そうでない部分は、収容室82を除く機内空間200に面した(露出した)状態にある。このため、感光体ドラム42の回転(円周)方向において、当該感光体ドラム42の表面のシーズニング状況に差異が生じ、ひいては当該感光体ドラム42の表面の電気的特性に差異が生ずる虞がある。
この状態で、改めて画像形成処理が行われると、感光体ドラム42の表面に形成されるトナー画像に濃度ムラが生じ、この濃度ムラは当然に、当該画像形成処理によって最終的に形成される出力画像にも現れる。この不都合は、画像形成処理が行われた後に限らず、公知のプロセスコントロール処理(画像濃度を調整するための処理)や公知のレジスト調整処理(各画像形成ステーション22,22,…による単色トナー画像の形成タイミングを調整するための処理)などの感光体ドラム42の回転駆動を伴う処理が行われた後も、生ずる可能性がある。
図7は、トナー画像に発生した濃度ムラの一例であり、ベタ画像を出力したときに発生する濃度ムラを示す。この図7における上下方向は、主走査方向に対応し、図7における左右方向は、副走査方向、つまり用紙搬送方向に、対応する。この図7に示される出力画像には、主走査方向に沿って延伸する濃度の低いスジ300が現れ、詳しくは2本のスジ300および300が現れる。それぞれのスジ300の副走査方向における寸法、言わば幅寸法D’は、感光体ドラム42の回転方向における開口部82aの寸法Dに相当する。また、これら2本のスジ300および300の副走査方向における相互間距離は、感光体ドラム42の円周に相当する。なお、図7は、外気の温湿度θおよびφが収容室82の温湿度よりも極端に低い場合の出力画像の一例を示す。外気の温湿度θおよびφと収容室82の温湿度との関係によっては、それぞれのスジ300と(余白を除く)それ以外の部分との濃度の関係(高低)が変わる。
このような不都合は、外気の温湿度θおよびφが低いほど、詳しくは外気の温度θが10℃以下であり、かつ、外気の絶対湿度(容積絶対湿度:空気中に含まれる水蒸気の量)ρが1g/m3以下であるときに、生じ易い。なお、温湿度θおよびφと絶対湿度ρとは、図8に示されるような関係にあるが、この図8において、当該温湿度θおよびφと絶対湿度ρとが網掛け模様の領域に該当するときに、ここで言う不都合が生じ易い。
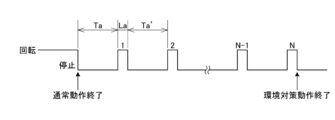
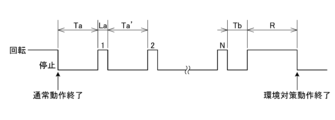
この不都合に対処するべく、本第1実施例によれば、画像形成処理、プロセスコントロール処理、レジスト調整処理などの感光体ドラム42の回転駆動を伴う言わば通常動作が行われた後に、当該通常動作が終了した時点から所定の待機時間(第1時間)Taが経過するまでの間に、当該通常動作が行われない場合であって、外気の温度θが所定の温度閾値θth以下(θ≦θth)であり、かつ、当該外気の絶対湿度ρが所定の湿度閾値ρth以下(ρ≦ρth)である場合に、環境対策動作が行われる。なお、待機時間Taは、たとえば3分間である。そして、温度閾値θthは、たとえば10℃であり、湿度閾値ρthは、たとえば17g/m3である。
この環境対策動作においては、図9に示されるように、感光体ドラム42の表面が所定の第1距離La移動するように、当該感光体ドラム42が回転駆動される(第1制御処理)。その後、所定の再待機時間(第2時間)Ta’が経過するまでの間に、通常動作が行われない場合、再び感光体ドラム42の表面が第1距離La移動するように、当該感光体ドラムが回転駆動される(再制御処理)。このような感光体ドラム42の回転駆動は、通常動作の実行を指示する命令が受け付けられない限り、最初の(待機時間Ta経過直後の)回転駆動を含め、所定回数Nにわたって行われる。なお、第1距離Laは、前述の開口部82aの寸法Dよりも大きく、換言すれば感光体ドラム42の表面のうちの当該開口部82aを覆った部分の寸法Dよりも大きく(La>D)、たとえば20mmである。また、再待機時間Ta’は、たとえば前述の待機時間Taと等価(Ta=Ta’)であり、つまり3分間である。そして、所定回数Nは、たとえば10である。
すなわち、この環境対策動作によれば、第1距離La分の感光体ドラム42の回転駆動が1回行われるたびに、当該感光体ドラム42の表面のうちの開口部82aを覆う部分が当該開口部82aの寸法Dよりも大きくずれる。そして前述したように、感光体ドラム42の直径が30mmであること、つまり当該感光体ドラム42の外周が約94mm(≒30×π)であることから、第1距離La分の感光体ドラム42の回転駆動が10(=N)回行われることによって、当該感光体ドラム42は、2周以上(=(20mm×10)/94mm)回転することになる。これにより、収容室82の温湿度と、当該収容室82を除く機内空間200の温湿度とが、互いに乖離した状態にあることによる感光体ドラム42の表面の電気的特性への影響が大きく軽減される。さらに、この環境対策動作は、途中で、通常動作の実行を指示する命令が受け付けられない限り、約30分間(≒3分間×10)にわたって行われる。この約30分間という時間が経過すれば、収容室82の温湿度と、当該収容室82を除く機内空間200の温湿度とが、比較的に均等になり、感光体ドラム42の表面の電気的特性の差異が十分に解消される。
なお、環境対策動作が行われている途中で、前述の通常動作の実行を指示する命令が受け付けられた場合は、当該環境対策動作が強制的に終了される。その上で、通常動作が実行される。この場合は、収容室82の温湿度と当該収容室82を除く機内空間200の温湿度とが近い状態にあるか、当該感光体ドラム42の表面のうちの開口部82aを覆う部分が当該開口部82aの位置から十分移動しているので、濃度ムラは発生しない。
以上のような環境対策動作を実現するために、CPU100aは、前述の制御プログラムに従って、厳密には当該制御プログラムに含まれる環境対策プログラムに従って、環境対策タスクを実行する。この環境対策タスクの流れを、図10に示す。この環境対策タスクは、画像形成処理、プロセスコントロール処理、レジスト調整処理などの感光体ドラム42の回転駆動を伴う通常動作が終了したときに、これに応答して実行される。
この環境対策タスクによれば、CPU100aは、まず、ステップS1において、温度センサ108aにより検出された温度θ、および、湿度センサ108bにより検出された相対湿度φを確認する。そして、CPU100aは、処理をステップS3へ進める。
ステップS3において、CPU100aは、ステップS1で確認された温度θおよび相対湿度φに基づいて、詳しくは当該温度θおよび相対湿度φを次の式1に適用することで、絶対湿度ρを導出する。この式1としては、温度θ(気温)から飽和水蒸気量を求め、当該飽和水蒸気量に相対湿度φを乗ずることにより求められた水蒸気分圧を用いて絶対湿度ρを算出する、一般的な式が用いられる。そして、CPU100aは、処理をステップS5へ進める。
《式1》
ρ=f(θ,φ)
ρ=f(θ,φ)
ステップS5において、CPU100aは、所定の環境条件が満足されているかどうかを判定する。ここで言う環境条件には、外気の温度θが所定の温度閾値θth以下であること、および、当該外気の絶対湿度ρが所定の湿度閾値ρth以下であることを、含む。すなわち、CPU100aは、外気の温度θが所定の温度閾値θth以下であり、かつ、当該外気の絶対湿度ρが所定の湿度閾値ρth以下である場合に、環境条件が満足されているものと判定する。このステップS5において、CPU100aは、環境条件が満足されているものと判定した場合(S5:YES)、処理をステップS7へ進める。一方、環境条件が満足されていない場合は(S5:NO)、CPU100aは、環境対策タスクを終了する。
ステップS7において、CPU100aは、第1距離La分の感光体ドラム42の回転駆動の回数をカウントするための不図示のカウンタによるカウント値nに、その初期値である『1』を設定する。ここで言うカウンタは、CPU100aにより構成されるソフトウェアカウンタであるが、適当なハードウェア要素により構成されるハードウェアカウンタであってもよい。このステップS7の実行後、CPU100aは、処理をステップS9へ進める。
ステップS9において、CPU100aは、待機時間Taを計測するためのタイマをリセットした上で、スタートさせる。この待機時間Taを計測するためのタイマは、たとえばCPU100aにより構成されるソフトウェアタイマであるが、適当なハードウェア要素により構成されるハードウェアタイマであってもよい。また、待機時間Taを計測するためのタイマは、再待機時間Ta’を計測するためのタイマとしても利用される。このステップS9の実行後、CPU300aは、処理をステップS11へ進める。
ステップS11において、CPU100aは、前述の通常動作の実行を指示する命令が受け付けられていないかどうかを判定する。ここで、通常動作の実行を指示する命令が受け付けられていない場合(S11:YES)、CPU100aは、処理をステップS13へ進める。一方、通常動作の実行を指示する命令が受け付けられた場合は(S11:NO)、CPU100aは、環境対策タスクを終了する。なお、通常動作は、環境対策タスクとは別のタスクにより実行される。
ステップS13において、CPU100aは、前述の待機時間Taを計測するためのタイマによる計測時間が当該待機時間Taを経過したかどうかを判定する。ここで、待機時間Taが経過していない場合(S13:NO)、CPU100aは、処理をステップS11へ戻す。一方、待機時間Taが経過した場合は(S13:YES)、CPU100aは、処理をステップS15へ進める。
ステップS15において、CPU100aは、感光体ドラム42を第1距離La分だけ回転駆動させ、厳密にはそうするようにドラム用モータ43を制御する。そして、CPU100aは、処理をステップS17へ進める。
ステップS17において、CPU100aは、前述のカウンタによるカウント値nをインクリメントし、厳密にはそうするよう当該カウンタを制御する。そして、CPU100aは、処理をステップS19へ進める。
ステップS19において、CPU100aは、ステップS17におけるインクリメント後のカウント値nと、前述の所定回数Nとを、比較する。ここで、カウント値nが所定回数N以下(n≦N)である場合、つまり第1距離La分の感光体ドラム42の回転駆動がまだ所定回数Nにわたって行われていない場合(S19:NO)、CPU100aは、処理をステップS9へ戻す。一方、カウント値nが所定回数Nよりも大きい(n>N)場合、つまり第1距離La分の感光体ドラム42の回転駆動が所定回数Nにわたって行われた場合は(S19:YES)、CPU100aは、環境対策タスクを終了する。なお、第1距離La分の感光体ドラム42の回転駆動が所定回数Nにわたって行われたことによって、環境対策タスクが終了した場合は、画像形成装置10は、省エネモードとなり、つまりはそうなるようにCPU100aが別のタスクを実行する。
このように、本第1実施例によれば、とりわけ環境対策動作によれば、感光体ドラム42の表面が所定の第1距離Laずつ間欠的に移動するように、当該感光体ドラム42が間欠駆動される。これにより、収容室82の温湿度と、当該収容室82を除く機内空間200の温湿度とが、互いに乖離した状態にあることによる感光体ドラム42の表面の電気的特性への影響が大きく軽減される。その結果、図7に示されるようなスジ300が現れるという不都合が解消され、良好な出力画像が得られる。
なお、本第1実施例における開口部82aの寸法D、温度閾値θth、湿度閾値ρth、待機時間Ta、再待機時間Ta’、第1距離La、所定回数Nなどの値は、一例であり、画像形成装置10の仕様や性質などに応じて適宜に定められる。
また、絶対湿度ρについては、式1に基づいて導出されたが、これに限らない。たとえば、図8に示されるような絶対湿度表がデータ化されたルックアップテーブルが設けられ、このルックアップテーブルに基づいて、つまり温度センサ108aにより検出された温度θと湿度センサ108bにより検出された相対湿度φとが当該ルックアップテーブルと照合されることで、絶対湿度Haが導出されてもよい。
本第1実施例における通常動作は、本開示に係る所定動作の一例である。そして、本第1実施例における環境条件は、本開示に係る所定条件の一例である。さらに、本第1実施例における待機時間Taは、本開示に係る第1時間の一例であり、当該待機時間Ta経過直後に感光体ドラム42を第1距離La分だけ回転駆動させる処理は、本開示に係る第1制御処理の一例である。加えて、本第1実施例における再待機時間Ta’は、本開示に係る第2時間の一例であり、当該再待機時間Ta’経過直後に第1距離La分だけ回転駆動させる処理は、本開示に係る再制御処理の一例である。そして、廃トナーボックス84は、本開示に係る付着物回収容器の一例である。
[第2実施例]
次に、本開示の第2実施例について、図11および図12をさらに参照して説明する。
次に、本開示の第2実施例について、図11および図12をさらに参照して説明する。
前述したように、収容室82は、略密閉空間であり、この略密閉空間である収容室82には、感光体ドラム42の表面から除去された廃トナーを含む付着物が収容される。この収容室82に収容された付着物は、或る程度の大きさの塊状に凝集する傾向があることから、水分が出入りし難い性質を持つ。このため、収容室82に収容された付着物が保湿剤あるいは乾燥剤として機能し、当該収容室82に面した感光体ドラム42の表面のシーズニングを遅らせる大きな要因となる。特に、放置中に外気の絶対湿度ρが低い状態に変化するほど、当該外気の絶対湿度ρと収容室82の絶対湿度との差が大きくなるため、その影響が顕著になる。
そこで、本第2実施例においては、とりわけ環境対策動作においては、第1実施例におけるのと同様の所定回数Nにわたる間欠駆動が行われた後に、依然として前述の通常動作の実行を指示する命令が受け付けられていない場合には、収容室82に収容された付着物の全てを廃トナーボックス84へ排出するための空転処理(第2制御処理)が行われる。
具体的には、図11に示されるように、所定回数Nにわたる間欠駆動が終了した後、所定の確認時間Tbにわたって、通常動作の実行を指示する命令が受け付けられていないかどうかが確認され、当該命令が受け付けられていない場合に、空転処理が行われる。この空転処理においては、画像形成処理を伴わずに、感光体ドラム42が回転駆動され、言わば空転される。これにより、搬送部材86が回転駆動されて、収容室82内の付着物が廃トナーボックス84へ排出される。この空転処理は、収容室82内の付着物の全てが廃トナーボックス84へ排出されるのに必要かつ十分な規定時間Rにわったって行われる。そして、空転処理が終了したことをもって、環境対策動作が終了する。なお、確認時間Tbは、たとえば数秒間~数十秒間であるが、これに限らない。
本第2実施例においても、CPU100aは、環境対策タスクを実行するが、前述(図10)のステップS19に続いて、図12に示されるステップS101~ステップS107を実行する。すなわち、ステップS19において、カウント値nが判定基準値よりも大きい(n>N+1)場合、つまり間欠駆動が終了した場合に(S19:YES)、CPU100aは、処理をステップS101へ進める。
ステップS101において、CPU100aは、確認時間Tbを計測するためのタイマをリセットした上で、スタートさせる。この確認時間Tbを計測するためのタイマは、たとえばCPU100aにより構成されるソフトウェアタイマであるが、適当なハードウェア要素により構成されるハードウェアタイマであってもよい。そして、CPU100aは、処理をステップS103へ進める。
ステップS103において、CPU100aは、通常動作の実行を指示する命令が受け付けられていないかどうかを判定する。ここで、通常動作の実行を指示する命令が受け付けられていない場合(S103:YES)、CPU100aは、処理をステップS105へ進める。一方、通常動作の実行を指示する命令が受け付けられた場合は(S103:NO)、CPU100aは、環境対策タスクを終了する。
ステップS105において、CPU100aは、確認時間Tbを計測するためのタイマによる計測時間が当該確認時間Tbを経過したかどうかを判定する。ここで、確認時間Tbが経過していない場合(S105:NO)、CPU100aは、処理をステップS103へ戻す。一方、確認時間Tbが経過した場合は(S105:YES)、CPU100aは、処理をステップS107へ進める。
ステップS107において、CPU100aは、感光体ドラム15を規定時間R分だけ回転駆動させ、厳密にはそうするようにドラム用モータ43を制御する。このステップS107の実行をもって、CPU100aは、環境対策タスクを終了する。そして、画像形成装置10は、省エネモードとなる。
このように、本第2実施例によれば、第1実施例におけるのと同様の所定回数Nにわたる間欠駆動が行われた後、依然として通常動作の実行を指示する命令が受け付けられていない場合には、収容室82に収容された付着物の全てを廃トナーボックス84へ排出するための空転処理が行われる。これにより、収容室82に収容された付着物が保湿剤あるいは乾燥剤として機能することによる感光体ドラム42の表面のシーズニングの遅延が解消され、より確実に良好な出力画像が得られるようになる。
なお、本第2実施例における空転処理は、本開示に係る第2制御処理の一例である。そして、確認時間Tbは、本開示に係る第3時間の一例である。
[第3実施例]
次に、本開示の第3実施例について、図13および図14をさらに参照して説明する。
次に、本開示の第3実施例について、図13および図14をさらに参照して説明する。
前述の第2実施例によれば、収容室82に収容された付着物の全てが廃トナーボックス84へ排出されるが、シャッタ90が開放状態にある場合には、廃トナーボックス84へ排出された付着物が保湿剤あるいは乾燥剤として機能することによる影響が懸念される。
そこで、本第3実施例においては、図13に示されるように、シャッタ90を開閉駆動するための開閉駆動手段としてのシャッタ用モータ91が設けられる。そして、前述の空転処理が終了した時点で、つまり環境対策動作が終了した時点で、シャッタ90が閉鎖状態となるように、シャッタ用モータ91が制御される。なお、シャッタ用モータ91は、画像形成部20に設けられる。また、シャッタ用モータ91は、たとえば直流モータであるが、これに限らない。
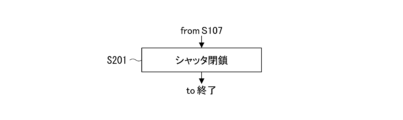
本第3実施例においても、CPU100aは、環境対策タスクを実行するが、第2実施例(図12)におけるステップS107に続いて、図14に示されるステップS201を実行する。すなわち、ステップS107において、感光体ドラム15を規定時間Rだけ回転駆動させた後、CPU100aは、処理をステップS201へ進める。
このステップS201において、CPU100aは、シャッタ90が閉鎖状態とし、つまりはそうなるようにシャッタ用モータ91を制御する。このステップS201の実行をもって、CPU100aは、環境対策タスクを終了する。そして、画像形成装置10は、省エネモードとなる。
このように、本第3実施例によれば、空転処理が終了した時点で、つまり環境対策動作が終了した時点で、シャッタ90が閉鎖状態とされる。これにより、廃トナーボックス84へ排出された付着物が保湿剤あるいは乾燥剤として機能することによる影響が阻止され、より確実に良好な出力画像が得られるようになる。
なお、閉鎖状態とされたシャッタ90は、通常動作の実行を指示する命令が受け付けられたときに、開放状態とされる。
本第3実施例においては、開閉駆動手段として、シャッタ用モータ91が採用されたが、これに代えて、ソレノイドなどのモータ以外の適当な駆動手段が採用されてもよい。
[第4実施例]
次に、本開示の第4実施例について、図15および図16をさらに参照して説明する。
次に、本開示の第4実施例について、図15および図16をさらに参照して説明する。
前述の第3実施例によれば、収容室82に収容された付着物の全てが廃トナーボックス84へ排出された後、シャッタ90が閉鎖状態とされるが、本第4実施例においては、さらに、シャッタ90が閉鎖状態とされた後、依然として通常動作の実行を指示する命令が受け付けられていない場合には、第1実施例におけるのと同様の間欠駆動が行われ、言わば再間欠駆動が行われる。
具体的には、図15に示されるように、シャッタ90が閉鎖状態とされた後、所定の再確認時間Tcにわたって、通常動作の実行を指示する命令が受け付けられていないかどうかが確認され、当該命令が受け付けられていない場合に、再間欠駆動が行われる。この再間欠駆動においては、感光体ドラム42の表面が所定の第2距離Lbずつ間欠的に移動するように、当該感光体ドラム42が間欠的に回転駆動される。そして、この間欠的な回転駆動が、つまり第2距離Lb分の感光体ドラム42の回転駆動が、所定回数Mにわたって行われる。なお、再確認時間Tcは、たとえば前述の待機時間Taと等価であり、つまり3分間である。そして、第2距離Lbは、たとえば第1距離Laと等価であり、つまり20mmである。また、再間欠駆動のインターバル時間Tc’は、たとえば再確認時間Tcと等価(Tc=Tc’)であり、つまり3分間である。さらに、所定回数Mは、たとえば最初の間欠駆動に係る所定回数Nと等価であり、つまり10である。そして、この再間欠駆動が終了したことをもって、環境対策動作が終了する。
本第4実施例においても、CPU100aは、環境対策タスクを実行するが、第3実施例(図14)におけるステップS201に続いて、図16に示されるステップS301~ステップS313を実行する。すなわち、ステップS201において、シャッタ90を閉鎖状態とした後、CPU100aは、処理をステップS301へ進める。
ステップS301において、CPU100aは、第2距離Lb分の感光体ドラム42の回転駆動の回数をカウントするための不図示のカウンタによるカウント値mに、その初期値である『1』を設定する。ここで言うカウンタは、CPU100aにより構成されるソフトウェアカウンタであるが、適当なハードウェア要素により構成されるハードウェアカウンタであってもよい。このステップS301の実行後、CPU100aは、処理をステップS303へ進める。
ステップS303において、CPU100aは、再確認時間Tcを計測するためのタイマをリセットした上で、スタートさせる。この再確認時間Tcを計測するためのタイマは、たとえばCPU100aにより構成されるソフトウェアタイマであるが、適当なハードウェア要素により構成されるハードウェアタイマであってもよい。また、再確認時間Tcを計測するためのタイマは、再間欠駆動のインターバル時間Tc’を計測するためのタイマとしても利用される。このステップS303の実行後、CPU300aは、処理をステップS305へ進める。
ステップS305において、CPU100aは、通常動作の実行を指示する命令が受け付けられていないかどうかを判定する。ここで、通常動作の実行を指示する命令が受け付けられていない場合(S305:YES)、CPU100aは、処理をステップS307へ進める。一方、通常動作の実行を指示する命令が受け付けられた場合は(S305:NO)、CPU100aは、環境対策タスクを終了する。
ステップS307において、CPU100aは、前述の再確認時間Tcを計測するためのタイマによる計測時間が当該再確認時間Tcを経過したかどうかを判定する。ここで、再確認時間Tcが経過していない場合(S307:NO)、CPU100aは、処理をステップS305へ戻す。一方、再確認時間Tcが経過した場合は(S307:YES)、CPU100aは、処理をステップS309へ進める。
ステップS309において、CPU100aは、感光体ドラム15を第2距離Lb分だけ回転駆動させ、厳密にはそうするようにドラム用モータ43を制御する。そして、CPU100aは、処理をステップS311へ進める。
ステップS311において、CPU100aは、前述のカウンタによるカウント値mをインクリメントし、厳密にはそうするよう当該カウンタを制御する。そして、CPU100aは、処理をステップS313へ進める。
ステップS313において、CPU100aは、ステップS311におけるインクリメント後のカウント値mと、前述の所定回数Mとを、比較する。ここで、カウント値mが所定回数M以下(m≦M)である場合、つまり第2距離Lb分の感光体ドラム42の回転駆動がまだ所定回数Mにわたって行われていない場合(S313:NO)、CPU100aは、処理をステップS303へ戻す。一方、カウント値mが所定回数Mよりも大きい(m>M)場合、つまり第2距離Lb分の感光体ドラム42の回転駆動が所定回数Mにわたって行われた場合は(S313:YES)、CPU100aは、環境対策タスクを終了する。なお、第2距離Lb分の感光体ドラム42の回転駆動が所定回数Mにわたって行われたことによって、環境対策タスクが終了した場合に、画像形成装置10は、省エネモードとなる。
このように、本第4実施例によれば、シャッタ90が閉鎖状態とされた後、依然として通常動作の実行を指示する命令が受け付けられていない場合には、再間欠駆動が行われる。これにより、感光体ドラム42の表面の電気的特性がより均一化され、より一層良好な出力画像が得られるようになる。
なお、本第4実施例における第2距離Lb、再確認時間Tc、インターバル時間Tc’、所定回数Mなどの値は、一例であり、画像形成装置10の仕様や性質などに応じて適宜に定められる。
本第4実施例における再確認時間Tcは、本開示に係る第43時間の一例である。そして、本第4実施例における再間欠駆動を実現するための処理は、本開示に係る第3制御処理の一例である。
[その他の適用例]
以上の各実施例は、本発明の具体例であり、本発明の技術的範囲を限定するものではない。これら各実施例以外の局面にも、本発明を適用することができる。
以上の各実施例は、本発明の具体例であり、本発明の技術的範囲を限定するものではない。これら各実施例以外の局面にも、本発明を適用することができる。
たとえば、排出部材86は、ドラム用モータ43からの駆動力を受けて回転するように構成されたが、これに限らない。ドラム用モータ43とは別に、排出部材86専用の回転駆動手段としてのモータが設けられてもよい。この場合、前述の空転処理において、感光体ドラム42を空転させる必要はなく、当該空転処理に代えて、排出部材86のみを駆動させるための処理が規定時間Rにわたって行われれば足りる。
また、各実施例においては、カラーの画像形成装置10を例に挙げて説明したが、モノクロの画像形成装置にも、本発明を適用することができる。さらに、各実施例における画像形成装置10は、複合機であるが、コピー機やプリンタなどの当該複合機以外の画像形成装置にも、本発明を適用することができる。
加えて、本発明は、画像形成装置という装置の形態に限らず、画像形成装置の制御方法という方法の形態によっても、提供することができる。
10 … 画像形成装置
20 … 画像形成部
42 … 感光体ドラム
43 … ドラム用モータ
48 … クリーニング装置
80 … クリーニングブレード
82 … 収容室
82a … 開口部
84 … 廃トナーボックス(付着物回収容器)
88a … 排出口
90 … シャッタ
91 … シャッタ用モータ
94 … 封止部材
100 … 制御部
100a … CPU
100b … 主記憶部
108 … 環境検出部
108a … 温度センサ
108b … 湿度センサ
La … 第1距離
Lb … 第2距離
Ta … 待機時間
Tb … 確認時間
Tc … 再確認時間
θ … 温度
θth … 温度閾値
φ … 相対湿度
ρ … 絶対湿度
ρth … 湿度閾値
20 … 画像形成部
42 … 感光体ドラム
43 … ドラム用モータ
48 … クリーニング装置
80 … クリーニングブレード
82 … 収容室
82a … 開口部
84 … 廃トナーボックス(付着物回収容器)
88a … 排出口
90 … シャッタ
91 … シャッタ用モータ
94 … 封止部材
100 … 制御部
100a … CPU
100b … 主記憶部
108 … 環境検出部
108a … 温度センサ
108b … 湿度センサ
La … 第1距離
Lb … 第2距離
Ta … 待機時間
Tb … 確認時間
Tc … 再確認時間
θ … 温度
θth … 温度閾値
φ … 相対湿度
ρ … 絶対湿度
ρth … 湿度閾値
Claims (9)
- 電子写真方式の画像形成装置であって、
所定の方向へ回転駆動される像担持体を含み、当該像担持体の表面にトナー像を形成するとともに当該像担持体の表面に形成された当該トナー像をシート状の画像記録媒体に転写する画像形成手段、
前記像担持体の表面に接触し、前記トナー像が前記画像記録媒体に転写された後の当該像担持体の表面に付着している付着物を除去する清掃部材、
前記清掃部材により除去された前記付着物を収容する空間であって、前記像担持体の回転軸方向に沿って延伸するとともに当該像担持体の表面に面する開口部を有し、当該開口部を介して当該付着物を収容し、当該開口部は、当該清掃部材と当該像担持体の表面に接触するシート状の封止部材とによって封止された状態にある、前記収容室、
前記回収室の外側の温度と相対湿度とを検出する環境検出手段、および、
前記像担持体の回転駆動を伴う所定動作が行われた後に、前記環境検出手段による検出結果が所定条件を満足し、かつ、当該所定動作が終了した時点から所定の第1時間が経過するまでの間に当該所定動作が行われなかった場合に、前記像担持体の回転方向へ当該像担持体の表面を所定の第1距離移動させるように前記像担持体を回転駆動させる第1制御処理を行う制御手段を備える、画像形成装置。 - 前記制御手段は、前記第1制御処理が終了した時点から所定の第2時間が経過するまでの間に前記所定動作が行われなかった場合に、再び当該第1制御処理を行う再制御処理を、当該所定動作が行われない限り、所定回数にわたって繰り返す、請求項1に記載の画像形成装置。
- 前記収容室は、当該収容室に収容された前記付着物を付着物回収容器へ搬送する搬送部材を備え、
前記制御手段は、前記再制御処理を前記所定回数にわたって繰り返した後に、所定の第3時間が経過しても前記所定動作が行われない場合に、前記収容室に収容された前記付着物を前記搬送部材により前記付着物回収容器へ搬送する第2制御処理を行う、請求項2に記載の画像形成装置。 - 前記収容室は、前記搬送部材によって搬送される前記付着物を前記付着物回収容器へ排出する排出口と、当該排出口を開閉する開閉部材と、をさらに備え、
前記制御手段は、前記第2制御処理を行うまでは、前記開閉部材を開放状態とし、当該第2制御処理を行った後に、当該開閉部材を閉鎖状態とする、請求項3に記載の画像形成装置。 - 前記制御手段は、前記開閉部材を閉鎖状態とした時点から所定の第4時間が経過する前の間に依然として前記所定動作が行われない場合に、前記像担持体の回転方向へ当該像担持体の表面を所定の第2距離移動させるように当該像担持体を回転駆動させる第3制御処理を行う、請求項4に記載の画像形成装置。
- 前記所定条件は、前記環境検出手段によって検出された前記温度と前記相対湿度とから導出される絶対湿度が所定の湿度閾値以下であること、および、当該温度が所定の温度閾値以下であることを含む、請求項1に記載の画像形成装置。
- 前記湿度閾値は、1g/m3であり、前記温度閾値は、10℃である、請求項6に記載の画像形成装置。
- 前記第1距離は、少なくとも前記像担持体の回転方向における前記開口部の寸法よりも大きい、請求項1に記載の画像形成装置。
- 電子写真方式の画像形成装置の制御方法であって、
前記画像形成装置は、
所定の方向へ回転駆動される像担持体を含み、当該像担持体の表面にトナー像を形成するとともに当該像担持体の表面に形成された当該トナー像をシート状の画像記録媒体に転写する画像形成手段、
前記像担持体の表面に接触し、前記トナー像が前記画像記録媒体に転写された後の当該像担持体の表面に付着している付着物を除去する清掃部材、
前記清掃部材により除去された前記付着物を収容する空間であって、前記像担持体の回転軸方向に沿って延伸するとともに当該像担持体の表面に面する開口部を有し、当該開口部を介して当該付着物を収容し、当該開口部は、当該清掃部材と当該像担持体の表面に接触するシート状の封止部材とによって封止された状態にある、前記収容室、および、
前記回収室の外側の温度と相対湿度とを検出する環境検出手段を備え、その上で、
前記像担持体の回転駆動を伴う所定動作が行われた後に、前記環境検出手段による検出結果が所定条件を満足し、かつ、当該所定動作が終了した時点から所定の第1時間が経過するまでの間に当該所定動作が行われなかった場合に、前記像担持体の回転方向へ当該像担持体の表面を所定の第1距離移動させるように当該像担持体を回転駆動させる第1制御処理を行う制御ステップを含む、制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023142053A JP2025035178A (ja) | 2023-09-01 | 2023-09-01 | 画像形成装置および画像形成装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023142053A JP2025035178A (ja) | 2023-09-01 | 2023-09-01 | 画像形成装置および画像形成装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2025035178A true JP2025035178A (ja) | 2025-03-13 |
Family
ID=94927277
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023142053A Pending JP2025035178A (ja) | 2023-09-01 | 2023-09-01 | 画像形成装置および画像形成装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2025035178A (ja) |
-
2023
- 2023-09-01 JP JP2023142053A patent/JP2025035178A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8843032B2 (en) | Image forming apparatus with electrical discharge suppression | |
| JP5764611B2 (ja) | トナーカートリッジおよび画像形成装置 | |
| JP2004102178A (ja) | 画像形成装置及びクリーニング装置 | |
| US7697879B2 (en) | Electrophotographic image forming apparatus and process cartridge | |
| AU2007200524B2 (en) | Neutralization device and image forming unit for use in image forming apparatus, and the image forming apparatus | |
| JP3724568B2 (ja) | 現像装置およびそれを用いた画像形成装置 | |
| JP5771658B2 (ja) | トナーカートリッジおよび画像形成装置 | |
| JP5110291B2 (ja) | トナーシール部材、トナーシール装置、クリーニング装置、プロセスカートリッジ、画像形成装置、トナーシール装置の製造方法 | |
| JP4443589B2 (ja) | 現像装置およびこれを備える画像形成装置 | |
| JPH09160364A (ja) | 画像形成装置 | |
| JP2004101838A (ja) | 画像形成装置、および画像形成装置の制御方法 | |
| JP2025035178A (ja) | 画像形成装置および画像形成装置の制御方法 | |
| CN101989058B (zh) | 调色剂盒及使用其的图像形成装置 | |
| JP5093458B2 (ja) | 光除電装置、像保持体ユニット、画像形成ユニットおよび画像形成装置 | |
| JP2009258483A (ja) | クリーニング装置及びこれを用いた画像形成装置 | |
| JP3724567B2 (ja) | 現像装置およびそれを用いた画像形成装置 | |
| JP2007033468A (ja) | 画像形成装置 | |
| JP3492858B2 (ja) | 現像装置 | |
| JP2006113285A (ja) | カラー画像形成装置 | |
| JP6646246B2 (ja) | 現像装置、プロセスカートリッジ、及び、画像形成装置 | |
| JP5583522B2 (ja) | 現像装置及びこれを備えた画像形成装置 | |
| JP2012132952A (ja) | トナーカートリッジおよび画像形成装置 | |
| JP6033596B2 (ja) | 画像形成装置およびトナー補給装置 | |
| JP2005099593A (ja) | トナー補給装置及び画像形成装置 | |
| JP3837815B2 (ja) | 現像装置及び画像形成装置 |