JP2024500445A - ワイヤおよびカテーテルの配置デバイス - Google Patents
ワイヤおよびカテーテルの配置デバイス Download PDFInfo
- Publication number
- JP2024500445A JP2024500445A JP2023537623A JP2023537623A JP2024500445A JP 2024500445 A JP2024500445 A JP 2024500445A JP 2023537623 A JP2023537623 A JP 2023537623A JP 2023537623 A JP2023537623 A JP 2023537623A JP 2024500445 A JP2024500445 A JP 2024500445A
- Authority
- JP
- Japan
- Prior art keywords
- wire
- needle
- slide
- syringe
- plunger
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims description 70
- 230000008878 coupling Effects 0.000 claims description 6
- 238000010168 coupling process Methods 0.000 claims description 6
- 238000005859 coupling reaction Methods 0.000 claims description 6
- 210000001519 tissue Anatomy 0.000 description 32
- 238000000034 method Methods 0.000 description 29
- 239000012530 fluid Substances 0.000 description 24
- 210000005166 vasculature Anatomy 0.000 description 23
- 210000003811 finger Anatomy 0.000 description 11
- 238000007789 sealing Methods 0.000 description 10
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 210000001367 artery Anatomy 0.000 description 5
- 230000008901 benefit Effects 0.000 description 5
- 206010033675 panniculitis Diseases 0.000 description 5
- 210000004304 subcutaneous tissue Anatomy 0.000 description 5
- 210000004204 blood vessel Anatomy 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 239000004033 plastic Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 210000003462 vein Anatomy 0.000 description 3
- 241001465754 Metazoa Species 0.000 description 2
- 206010000269 abscess Diseases 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000035515 penetration Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 210000003813 thumb Anatomy 0.000 description 2
- 239000004264 Petrolatum Substances 0.000 description 1
- 238000002583 angiography Methods 0.000 description 1
- 210000000709 aorta Anatomy 0.000 description 1
- 210000001715 carotid artery Anatomy 0.000 description 1
- 238000013153 catheter ablation Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000000502 dialysis Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 229940066842 petrolatum Drugs 0.000 description 1
- 235000019271 petrolatum Nutrition 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 238000007454 stoma creation Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000002537 thrombolytic effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M25/09041—Mechanisms for insertion of guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/06—Body-piercing guide needles or the like
- A61M25/065—Guide needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M2025/09116—Design of handles or shafts or gripping surfaces thereof for manipulating guide wires
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Hematology (AREA)
- Animal Behavior & Ethology (AREA)
- Engineering & Computer Science (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Pulmonology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Surgical Instruments (AREA)
Abstract

ワイヤ24を組織作業空間84内へと送達するためにシリンジ本体14およびプランジャ20と相互作用するためのデバイス10が、ワイヤの近位端を作業空間84内へと案内するための孔33を有する、シリンジ本体14と連結するように構成された針32を備える。筐体12が、使用者による係合のために、シリンジ本体14と連結するように構成される。滑動部18が、シリンジプランジャ20と連結するように構成され、シリンジプランジャを前方位置と後退位置との間で移動させるために使用者によって係合され得る。滑動部18は、滑動部18がプランジャ20を前方位置から後退位置へと移動させるときに、ワイヤの遠位端28を移動させ、ワイヤの近位端26を針32内において前方に前進させるために、ワイヤ遠位端と解放可能に連結される。
Description
関連出願の相互参照
本出願は、2020年12月15日に出願された米国仮特許出願第63/125,913号(継続中)、および、2021年6月27日に出願された米国仮特許出願第63/215,493号(継続中)の優先権の便益を主張し、それらの特許出願の開示は、それらの全体において、参照により本明細書に組み込まれている。
本出願は、2020年12月15日に出願された米国仮特許出願第63/125,913号(継続中)、および、2021年6月27日に出願された米国仮特許出願第63/215,493号(継続中)の優先権の便益を主張し、それらの特許出願の開示は、それらの全体において、参照により本明細書に組み込まれている。
本発明は、医療処置の実施に向けた他の要素の位置決めのために、案内ワイヤを、組織内へと位置決めするためであって、具体的には脈管構造などの組織における作業空間内へと位置決めするためのデバイスに向けられている。
医薬および手術において一般的に、カテーテルおよび他の要素などの要素を、脈管構造においてなど、組織の中の作業空間内へと位置決めすることが必要である。セルディンガー法が、案内ワイヤのこのような位置決めのためにしばしば使用される。このような技術において典型的には、針が静脈、動脈、または他の身体の空洞もしくは作業空間内へと挿入される。しばしば、シリンジが針に取り付けられ、使用者は、針が皮膚および組織へと前進させられるときに負圧を発生させるために、シリンジを戻すように引き込む。針が皮膚および皮下組織を通じて進む間、針の内腔または孔が塞がれ、使用者は、シリンジの中で作り出される真空および負圧のため、プランジャを短い距離で引っ張ることができるだけである。針先端または孔が血管の内部などの標的空間に入ると、シリンジは、負圧の力の下で血液、空気、または他の流体で満たされる。針を挿入する使用者は、針が適切に配置させられていることを知るために、これを可視化することができる。
針先端が標的空間内に位置すると、シリンジは針から取り外される。そこから、柔軟なワイヤが針を通じて標的空間へと通される。次に、針は戻すように滑動させられ、ワイヤを通じて除去される。丈夫なプラスチックの要素である拡張器が、ワイヤを通じて組織および作業空間内へと通され、次に除去される。次に、拡張器と概して同じ大きさであるがより柔軟であるカテーテルが、ワイヤに案内されて、ワイヤを通じて標的空間内へと配置させられ得る。
既存の技術の現在の欠点のうちの1つは、針からのシリンジの除去から、針および作業空間へのワイヤの送り込みまで、様々な段階においていくつかの問題が生じ得ることである。使用者について、ワイヤを移動および操縦することは厄介であり、難しい可能性がある。ワイヤは細く、しばしば動き回る。そのため、ワイヤは、その一部が滅菌野の外部の何かに触れる場合、無菌ではなくなる可能性がある。ワイヤを針の後へと進めることも難しい可能性がある。針は、シリンジが取り外される間、および、使用者がワイヤに手を伸ばし、ワイヤを針へと通す間にも移動する可能性がある。このような状況では、針は、ワイヤが前進させられないように標的空間の外へ引っ張られる可能性がある。針は、望まれるよりも遠くへと前進させられる可能性もある。これは合併症を引き起こす可能性がある。例えば、内頚中心静脈カテーテル配置の場合、頸動脈はしばしば後位にある。そのため、針が静脈において望まれるよりも遠くに進む場合、針先端は、使用者がそれを知ることなく動脈にある可能性がある。ワイヤは動脈の中へと通される。そのため、動脈が拡張される可能性がある。これは、より大きな孔が高い圧力の動脈系に作られたとすれば、深刻な合併症をもたらす可能性がある。
したがって、セルディンガー法、および、ワイヤを身体の作業空間内において位置決めするための同様の技術において、安全性および時間効率を向上させることができるデバイスおよび方法に対する要求がある。人間工学性を向上させ、使用者により容易に負圧を引き込ませ、ワイヤ配置の間の過程においてフィードバックを受けさせる必要性もある。
ワイヤを組織作業空間内へと送達するためにシリンジ本体およびプランジャと相互作用するためのデバイスが、シリンジ本体と連結し、ワイヤの近位端を作業空間内へと案内するための少なくとも1つの孔を有するように構成される針を備える。筐体が、シリンジ本体と連結するように構成され、1つまたは複数の把持部分など、使用者による係合のための部分を備える。滑動部が、シリンジプランジャを前方位置と後退位置との間で移動させるためにシリンジプランジャと連結するように構成される。滑動部は、その移動のために、使用者による係合のための部分も備える。使用者は、シリンジに係合して操縦するために、筐体および滑動部を把持することができる。滑動部は、滑動部がシリンジプランジャを前方位置から後退位置へと移動するときに、ワイヤの遠位端を移動させ、ワイヤの近位端を針内において前方に前進させるために、遠位端と解放可能に連結される。例えば、滑動部は、シリンジプランジャが移動させられるときにワイヤの遠位端を移動させるために、ワイヤの遠位端を解放可能に把持するためのワイヤ把持構造を備え得る。滑動部がシリンジプランジャを後退位置へと移動させるときにワイヤの近位端を針内において前方へ前進させるために、一実施形態は、シリンジプランジャが後退位置へと移動することの結果としてワイヤの近位端を前方に前進させるために、ワイヤ遠位端の移動を変換するためのワイヤ前進機構を備える。
図1は、人などの動物の脈管構造などの身体の空間または作業空間内へとワイヤを前進させるためのデバイス10の実施形態を示している。このようなワイヤの前進は、いくつかの異なる医療処置のために使用でき、概してセルディンガー法と称される。本明細書では、脈管構造という用語は、身体における組織においての空間または作業空間に概して言及するためにしばしば使用されるが、本発明の使用は、脈管構造内におけるワイヤ配置だけに限定されない。さらに、検討されている実施形態は、他の要素を身体の作業空間内に位置決めするための案内ワイヤの配置についてであるが、他のワイヤ構造がデバイスで挿入されてもよく、そのため、本明細書では要素は「ワイヤ」と称される。
デバイス10は、シリンジ本体14を含むかまたはシリンジ本体14と連結するように構成される筐体12を備える。筐体は、使用者による係合のための1つまたは複数の把持部分16などの部分を定める。筐体は、シリンジ本体を把持する方法を提供する。滑動要素または滑動部18が、筐体の外側に沿って位置決めされ、シリンジプランジャ20と連結するように構成されている。シリンジプランジャ20は、例えば、図2Aに示されているような前方位置と、図2Bに示されているような後退位置と、の間で、シリンジ本体14の内部で移動する。滑動部18は、滑動部18およびシリンジプランジャ20を筐体12およびシリンジ本体14に対して移動させるために、使用者による係合のための把持部分22も備える。滑動部はプランジャの延長部として作用する。明確には、滑動部18は、使用者が、デバイス10の使用の間に、より容易にシリンジプランジャ20と係合し、シリンジプランジャ20を前方位置から後退位置へと移動させるための方法を提供する。
デバイス10は、組織作業空間内への送達および配置のためにワイヤ24を操縦し、ワイヤ24を備える。ワイヤ24は近位端26と遠位端28とを備える。滑動部は、ワイヤの遠位端を移動させ、それによって、滑動部がプランジャを前方位置から後退位置へと移動させるときに近位端を針内において前方に前進させるために、遠位端と解放可能に連結される。図1に示されているような一実施形態における滑動部18は、本明細書に記載されているようなプランジャを伴ってのワイヤの移動を容易にするために、ワイヤの遠位端28と解放可能に係合または把持するワイヤ把持構造30を備える。針32は、シリンジ本体14と連結され、本発明の特徴によれば、ワイヤの近位端26を脈管構造または他の作業空間内へと案内するための孔を有するようにも構成されている。より明確には、滑動部18と、連結されたシリンジプランジャ20と、の、シリンジ本体における針32から離れる後退位置への後方への移動は、針において負圧を引き込むことになる。ワイヤを解放可能に把持する滑動部18の移動は、針32を通じてワイヤ24を脈管構造内へと前進させようとする。そのために、ワイヤ前進機構34が、図1において見られるように、概して滑動部18と筐体12との間に連結される。ワイヤ前進機構34は、一方向における移動を他の方向における移動へと変換するようにワイヤに作用する。機構34は、図2Bに示されているように滑動部18がシリンジプランジャ20を前方位置から後方位置または後退位置へと移動させるとき、ワイヤ遠位端の移動を、ワイヤの近位端26を針32の中へと前方に前進させ、針32を通じて前方に前進させるための移動へと変換するように構成されている。
ワイヤ前進機構の目的は、1回の移動の行程において、滑動部18の後方への移動、および後退位置へのシリンジプランジャ20の付随する移動を反転させ、または変換し、ワイヤ24の近位端の針の中への前方への移動、および針を通じての前方への移動を作り出すことである。図2Aおよび図2Bに示されているように、人の作業者の手40が、筐体12および滑動部18のそれぞれの把持部分16および22と係合し、図2Aおよび図2Bに示されているように、滑動部を筐体に沿って後退位置に向けて移動させる。図1における滑動部18のワイヤ把持構造30は、ワイヤの遠位端28を解放可能に把持し、滑動部およびワイヤは一体に連結される。滑動部18およびシリンジプランジャ20の後退位置への移動は、ワイヤの遠位端をワイヤ前進機構34に向けて移動させる。ワイヤ前進機構34は、ワイヤ遠位端の後方への移動を、ワイヤ近位端26の針32の中への前方への移動または前進の移動、および針32を通じての前方への移動または前進の移動へと反転させる、または変換する。滑動部18およびプランジャ20が後退位置へとさらに移動させられるとき、ワイヤの近位端26は、針を通じてさらに前方へと前進させられ、最終的には、針が挿入される脈管構造または他の作業空間内へと前進させられる。
この方法で、本発明のデバイス10は、単一の運動を提供し、プランジャが後退位置へと移動させられ、滑動部18によって移動させられるシリンジプランジャ20に関連して負圧が引き込まれて放出されるにつれて、ワイヤの針32を通じた脈管構造への特徴的な滑らかな前方への移動を提供する。滑動部18は、ワイヤとプランジャとの両方と連結され、本明細書においてさらに記載されているように、滑動部18の単一の行程または移動で、シリンジプランジャ20に加えてワイヤ24を両方とも移動させる。
針32は、シリンジ本体と連結するように構成され、ワイヤの近位端を案内するための少なくとも1つの基部または内腔を有する。デバイス10は、針32をデバイスと連結するための針装着部50をさらに備える。針装着部50は、針32をシリンジ本体14およびワイヤ24の両方と連結させる。図3Aおよび図3Bは、前方位置に滑動部およびシリンジプランジャがある状態でのデバイスの断面での上面図と、その後の前進したワイヤ24のために使用された後退位置に滑動部およびシリンジプランジャがある状態でのデバイスの断面での上面図と、を示している。針装着部50は、ワイヤ24の針32の中への移動、および針32を通じた移動を方向付けるための針孔33と連結された案内通路52を備える。針装着部50は、シリンジプランジャが図3Bに示されているように後退位置へと移動させられるとき、針孔に負圧を作り出すためにシリンジ本体14と連結される真空通路54も備える。本明細書において記載されているように、図3Bに示されているような後退位置への滑動部およびシリンジプランジャの移動は、針装着部50を通じて針32の中に負圧を引き込むことになる。針が組織によって塞がれている限り、その負圧は、筐体および滑動部のそれぞれの把持部分16および22における把持する人の手の力において、滑動部およびシリンジプランジャの後退位置への相当の後方への移動を概して妨げることになる。滑動部およびプランジャは、手の圧力で負圧を作り出すために若干移動することができるが、完全な後退位置へと容易に移動することは妨げられることになる。針先端が組織および脈管構造を貫通し、負圧が断ち切られると、滑動部およびシリンジプランジャは、デバイス10において後退位置へとより容易に引き込まれる、または移動させられ得る。同時に、滑動部およびプランジャの移動は、ワイヤ把持構造30を針32に対して後方へ移動させもする。これは、ワイヤ前進機構34を通じてワイヤ24を押し、ワイヤの移動を転回、反転、または変換し、そのため、図3Bに示されているように、針32を通じてワイヤの近位端26を前方へ前進させる。
図1~図3Bに示されている本発明の実施形態において、針装着部50は、真空通路54に加えて案内通路52において、両方で気密な通路を作り出す。針32は、中空であり、ワイヤ24の通過を可能とするように寸法決定される孔33を備える。孔33は、ワイヤ24が針の中で移動するとき、針32を通る空気および/または流体の同時の通過を許容するようにも寸法決定される。針装着部50は、真空通路54、針の孔33、およびワイヤ24のための案内通路52についての交差点60を形成している。シリンジ本体14は、針装着部50および通路54と気密な封止を形成する。図において示されているような本発明の一実施形態において、シリンジ本体14は、針装着部において適切に形成された開口または空洞17に嵌まる先端15を備える。交差区域60および針孔33との係合を通じての真空通路54は、図3Bに示されているように、針32とシリンジ本体の内部空間19との間に接続を提供する。シリンジプランジャ20が、矢印62によって示されているように、使用者によって後退位置へと押されるとき、針32を通じ、真空通路54を通じ、シリンジ本体の内部空間19へと気体または流体を引き込むための圧力が作り出される。このような負圧が針32に作り出され、特には針の孔33に作り出されることを確保するために、ワイヤ24を案内する通路52は、図1の実施形態において気密である必要もある。そのために、針装着部は、案内通路に気密封止を提供するために案内通路52およびワイヤ24と係合する封止機構64を備える。つまり、封止機構64は、負圧が維持され、負圧がシリンジ本体14の中のプランジャ20の移動を通じて引き込まれているときに同時に、ワイヤ24が針装着部の案内通路および針32を通じて移動することができるように、ワイヤ24が封止機構を通過して案内通路52へと入るときにワイヤ24と係合する。一実施形態において、封止機構64は、ワイヤを通過させるための孔を有するゴムまたはシリコーンの要素を伴い得る。ワイヤ24は、滑らかなワイヤまたはコイル状のワイヤであり得る。コイル状のワイヤは、その表面に被覆を有し得る、または、被覆材料としてワセリンなどの物質が塗布され得る。
本発明では、図示されているような針装着部50を使用することは、シリンジの流体/空気の通路をワイヤの通路から分離している。これは、ワイヤが針内になおもある間にシリンジを取り外すことを可能にし、ワイヤがすでに位置決めまたは前進されている間にファビアン試験を実施する能力を提供する。これは、ワイヤが、意図されている静脈ではなく、動脈にないことを立証することができる。
針装着部50は、針に隣接するが針と一列ではないシリンジ通路を有する。むしろ、案内通路は、ワイヤを針へと真っ直ぐ移動させるために、針と一列である。これは、摩擦を低減し、より容易な前進を提供する。図14に示されているような他の実施形態では、シリンジまたは真空通路は針と並べられ、ワイヤは斜めに入る。事前に製造された針が、針基において使用され得る。代替で、針は針基に直接的に作り付けられてもよい。一実施形態において、針基は、透明な材料から作られてもよく、または、流体が針に入るときにより容易に見えるようにするための透明な領域を備えてもよい。
理解され得るように、シリンジプランジャ20は、シリンジ本体14の内壁と封止し、気密および流体密な封止を作り出すゴムまたはプラスチックの停止部21において途切れる細長い本体部分を有する典型的なシリンジプランジャを模すように構成され得る。シリンジプランジャ20の端23において矢印62の方向に加えられる力は、図3Bに示されているように、シリンジプランジャ20および停止部21を後退位置へと移動させることになる。図3Aは、前方位置において、シリンジ本体14の端に当てて、先端15に近接しているシリンジプランジャ20および停止部21を示している。針先端が塞がれる場合、負圧がシリンジに作り出される。
本発明の一態様によれば、筐体12は、シリンジ本体と連結するように構成されている。一実施形態において、シリンジ本体14は筐体との1つの構造体として形成されてもよく、その場合、シリンジ本体は、一体に型成形された筐体および把持部分を含む。本発明の他の実施形態では、筐体12は、シリンジ本体が筐体の把持部分16に対して適切な位置にある状態で、別体のシリンジ本体14を受け入れるように構成され得る。同様に、滑動部18は、シリンジプランジャと連結するように形成および構成され得る、または、滑動部は、滑動部および把持部分がシリンジプランジャとの1つの要素として移動するように、シリンジプランジャの延長部と一体に形成され得るか、もしくは、単一の要素として、そのような延長部として形成され得る。代替で、滑動部18は、一方の移動を他方へと結び付けるために、別々のシリンジプランジャに連結するように形成および構成されてもよい。この方法では、筐体12および滑動部18は、シリンジ本体およびシリンジプランジャを有する典型的なシリンジを受け入れて利用するように構成および寸法決定されてもよい。
そのために、図1Aは、シリンジ本体と連結するためにシリンジ本体14を受け入れるように構成される概して円筒形の通路17を筐体12が含むデバイス10の一実施形態を示している。滑動部18は、筐体12上において、または筐体12に隣接して滑動するように構成されており、筐体と概して平行に位置決めされる。筐体12上における案内要素11は、筐体およびシリンジ本体に対する後退位置への滑動の真っ直ぐな移動を確保するために、滑動部18と係合することができる。滑動部18は、端23を保持し、滑動部とプランジャとを連結するために、シリンジプランジャ20の端23と係合するための凹み29または他の構造を有する端25を有する。プランジャと滑動部との係合は締まり嵌めであり得る、または、プランジャの端23は、端23にスナップ留めする1つまたは複数の摘まみ37によって凹みにおいて保持され得る。この方法では、滑動部は、プランジャを移動させるために、プランジャの延長部として作用する。
筐体12、シリンジ本体14、滑動部18、およびシリンジプランジャ20は、軽量であって殺菌され得るプラスチック材料など、適切な材料から形成され得る。材料は、シリンジ本体内におけるプランジャの移動に加え、ワイヤ24の把持および案内のために、十分な剛性を提供する。
本発明の1つの特徴によれば、ワイヤ前進機構34は、滑動部がシリンジプランジャを前方位置から後退位置へと移動させるときに、ワイヤの近位端を、針の中へと前方に前進させ、針を通じて前方に前進させるように構成される。つまり、ワイヤ前進機構34は、シリンジプランジャを針から離すように後退位置へと後方へ移動させることが、実際には同時に、ワイヤを針の中へと前方に前進させ、針を通じて前方へ前進させ、最終的には、本明細書に記載されているように針が貫通する脈管構造へと前方へ前進させるように、ワイヤの方向を変換または変更するように機能する。これは、プランジャを後退位置へと移動させることが同時にワイヤを針へと前方に前進させる1回だけの流れるような動きで進行する。
図1~図3Bは、ワイヤ移動の方向を反転または変換するためのループ案内部70を備える、本発明の実施形態によるあるワイヤ前進機構34を示している。ループ案内部は、滑動部18およびシリンジプランジャの移動に対するワイヤ移動の方向における反転または変換を提供するように、滑動部18と筐体12との間に概して位置決めされる。明確には、図1を参照すると、ワイヤ前進機構34は、滑動部18のワイヤ把持構造30からワイヤを受け入れるように位置決めされる入力端または遠位端72と、ワイヤ24の近位端を案内し、ワイヤを針装着部50へと出力し、最終的には針32へと出力するための出力端または近位端74と、を有するループ案内部70を備える。ループ案内部70は、図1に示されるような閉じた管であり得る。代替で、ループ案内部は、開放していてもよく、ワイヤ24を捕らえて遠位端72から近位端74へと案内するための適切な構造を形成してもよい。図1に示されているように、筐体12は、ループ案内部70のそれぞれの遠位端72および近位端74と相互作用し、遠位端72および近位端74を収容する装着区域76、78を備えるように適切に形成され得る。筐体の長さに依存する他に、ループ案内部70の長さ、シリンジ本体の長さ、滑動部の長さ、およびシリンジプランジャの長さに依存して、1つまたは複数の追加の装着区域80が、遠位端72と近位端74との間のループ案内部70の一部分を保持するために、筐体12で実施され得る。図2Aに示されているように、ワイヤ24は、参照矢印62によって示されているようなワイヤ24および滑動部18の移動の方向を反転し、ワイヤ24の近位端26の移動の方向を矢印63の方向に変更するループ案内部70によって収容される。その方法では、滑動部18およびプランジャの矢印62の方向での後方への移動によって、シリンジ本体14を通じて負圧または真空を引き込むことができ、同時に、圧力が解放されるとき、ワイヤの近位端26は、矢印63の方向において、または、本明細書に記載されているような作業空間内への針32の移動の方向において、前方へ前進することになる。
具体的にはワイヤ24およびその端または区域に関して、本明細書で使用されているような近位および遠位という用語は、針を通じて作業空間内へと進行する身体に近接する一端と、針から離間され、滑動部18およびプランジャの移動によって把持されて押される他端と、を指示するために使用されている。これは、ワイヤの先端または途切れる端に明確に言及するというよりも、互いに対するワイヤの区域または部分に概して言及している。したがって、ワイヤ24の近位端26は、針内へと、および/または、針を通じて移動する部分または区域に言及しており、一方、ワイヤの遠位端28は、滑動部18と解放可能に連結され、ワイヤの近位端を組織作業空間内における位置へと押すために滑動部によって移動させられるワイヤの部分または区域に言及している。
図4A~図4Fは、本発明の使用と、ワイヤ、およびカテーテルなどの他の要素を、患者の脈管構造、何らかの他の空洞、または作業空間内へと位置決めするためのセルディンガー法または他の技術を実施するための本発明の方法と、を示している。デバイス10が、シリンジと係合するために、使用者の手40によって把持されている。明確には、手の指が、シリンジの一部と連結された要素、またはシリンジの一部の様々な把持部分16および22に位置決めされている。概して、筐体の把持部分16は使用者の手40および指によって保持され、一方、人差し指または他の指が、滑動部を筐体に対して移動させるために、滑動部18の把持部分22に近接して位置決めされる。この方法では、シリンジ本体とプランジャとが移動のために係合させられる。
図4Aは、患者の血液を搬送する内部通路(作業空間)84を画定する、または定める皮膚または組織82の1つまたは複数の層を含む人などの動物の脈管構造を示している。デバイス10は把持され、針32は、皮膚82に当てて位置決めされ、矢印86の方向において、参照要素82によって反映される皮膚および皮下組織へと押される。針32の先端33と針32の孔とは、最初は皮膚および皮下組織82によって塞がれる。使用者の手の指による把持部分22への矢印62の方向での後退の力が、プランジャを移動させ、針先端が塞がれているため、シリンジ本体14の中に負圧を作り出して引き込む。典型的には、滑動部18の図示されているような移動は、プランジャ20を前方位置から後退位置へと移動させようとしており、したがって空気または流体を針32へと引き込もうとしている。しかしながら、針先端33が皮下組織または皮膚82の中にあるため、空気または流体は針32に入ることができない。そのため、使用者が滑動部18を移動させ、流体/空気を引き込もうとするとき、負圧または真空がシリンジ本体14の中に作り出され、特にはシリンジ本体の内部空間19の中に作り出される。概して、ワイヤ24は針32へと通され、過程の開始において先端33に近接するのに十分な距離で通され得る。図4Aに示されているように、ワイヤの近位端は、組織82へと通されるとき、先端33において正しい位置にあり得る、または、先端の後方にあり得る。滑動部18は、プランジャがシリンジ本体14の中で引き込まれる真空からの相当の抵抗を満たす前に、矢印62の方向において若干移動可能であり得る。プランジャ18および関連するワイヤ把持構造30の移動がワイヤ24を若干移動させるため、概して、ワイヤ近位端26の先端またはワイヤの末端を、プランジャおよび真空の短い初期の引き込みにおいて針から外に出て行かないように、処置の開始において針の先端33から若干戻すように位置決めすることが望ましい。距離は、シリンジ本体/プランジャの大きさによって決定でき、デバイス10が、ワイヤの遠位端が針33の先端から外に移動する前の所望の大きさの負圧および滑動移動にカスタマイズできるように、把持構造30の中でワイヤを手動で移動させることで、使用者によって望まれるように調整できる。ある実施形態では、ワイヤは先端から1センチメートル~2センチメートル戻され得る。組織82によって定められる脈管構造内の作業空間などの空間84が、針33の先端にとってだけでなく、ワイヤ24にとっても最終的な標的である。
図4Bを参照すると、針32が組織82を通じて空間84へと通されると、流体/空気を引き込むことができ、負圧または真空はもはやない。そのため、滑動部18およびシリンジプランジャ20は、矢印62の方向においてより容易に移動させることができる。つまり、空間84内に針先端33があり、真空がない状態で、滑動部およびシリンジプランジャは、図4Bに示されているような後退位置へとさらに戻るように引き込まれ得る。その移動により、ワイヤ24の遠位端28はワイヤ前進機構34に向けて移動させられる。つまり、図4A~図4Fに示されているループ案内部70の実施形態であれば、ワイヤは、ループ案内部70に向けて、ループ案内部70を通じて移動させられ、方向は、針の方向においてワイヤ近位端26を移動させるために反転させられ、図4Bに示されているような矢印86によって反映されている。つまり、本発明の1つの態様によれば、ワイヤ前進機構は、滑動部18がシリンジプランジャ20を前方位置から後退位置へと移動させるときに、ワイヤ移動を変換または反転させ、ワイヤの近位端26を、針の中へと前方に前進させ、針を通じて前進させるように構成されている。理解されるように、後退位置は、真空が引き込まれる最も前方の位置の後方におけるシリンジ本体の任意の位置であり得る。そのため、後退位置は、シリンジ本体におけるシリンジプランジャの絶対的な後方の位置ではなく、概して前方位置に対してである。使用者が、滑動部およびプランジャの後退を制御する。ワイヤの遠位端28が滑動部18と共に後方に移動させられるとき、ワイヤ24の近位端は、針32を通じて前進させられ、標的空間84内へと前進させられる。述べられているように、本明細書に述べられている例は脈管構造内へのワイヤの移動を検討しているが、標的空間は、任意の適切な血管、膿瘍、もしくは身体の空洞、または患者の他の標的であり得、したがって、デバイス10を使用することは特定の脈管構造に限定されないが、脈管構造は、本明細書では、患者におけるワイヤの標的空間を大まかに述べるための用語として使用されている。
ワイヤ24が標的空間へと入れられると、ワイヤの遠位端28はワイヤ把持構造30から取り外すことができる。そのために、把持構造30は、ワイヤ把持構造30を開いてワイヤ24の遠位端20を解放するために圧迫され得る、図1に示されているようなレバーアーム31を備え得る。その後、ワイヤ24は、滑動部18およびプランジャに連結されるのではなく、使用者によって自由に操縦される。ワイヤ24がすでに標的空間84の中にあるため、使用者によるワイヤの小さい意図しない移動がワイヤを標的空間84から除去することはない。図4Bを参照すると、ワイヤ24は、遠位端28を反映する露出された区域に加え、近位端26の後方である筐体12に近接するワイヤの一部分において、概して把持可能である。使用者は、さらなる操縦のために、露出された場所のいずれかにおいてワイヤを把持することができる。例えば、デバイス10が一方の手によって保持される一方で、使用者の他方の手がワイヤをさらに前進させるために使用され得る。ワイヤが空間84の中で所望の距離に前進させられると、ワイヤは他の要素を標的空間84内へと挿入するために使用できる。例えば、ワイヤは、拡張器を伴うカテーテルを空間内へと前進させるために使用できる。
図4Cを参照すると、デバイス10、具体的には、針32および針装着部50が、ワイヤから取り外しできる。しかしながら、最初はシリンジ本体およびデバイスの残りの部分を針装着部から取り外すだけで、針を追加の処置のためにその場所に残すことが、望ましい可能性がある。例えば、ファビアン試験が、真空通路54と連結された針装着部における開口に、または、シリンジ本体14と最初に連結された通路に、配管を取り付けることで実施できる。カテーテル100の位置決めなどの処置のために、針32および針装着部50を含むデバイス10は、図4Cに示されているように、取り外され、ワイヤから引っ張り上げられる。明確には、デバイス10、針32、および針装着部50は、空間84内に位置決めされたワイヤ24から、矢印90の方向において取り外され得る。ワイヤ24は、ある使用では、ワイヤ24が案内のために使用されるように、カテーテルを標的空間84内へと案内および位置決めする目的のためであり得る。図4Cを再び参照すると、拡張器102の周りのカテーテル100は、デバイス10および針32が取り外されると、ワイヤの遠位端28上へと通される。
図4Dを参照すると、ワイヤ24が拡張器102およびカテーテル100内へと通されると、それらの要素は、組織82における開口、および、ワイヤを挿入するために利用された同じ開口を通じて、滑動させられ得る。図4Eに示されているように、拡張器102およびカテーテル100は、さらなる処置のために空間84内において位置決めされ得る。次に、ワイヤ24および/または拡張器102は、図4Fに示されているように、カテーテル100および空間84から除去することができる。脈管構造などの標的空間84の中でのさらなる処置の実行のためにカテーテル100を所定位置に残すために、ワイヤ24が最初に除去され、次に拡張器102が除去され得るか、または、それらが同時に除去され得る。
デバイス10は、ワイヤおよび他の要素を患者の標的空間の中に導入および前進させるための技術に対して相当の利点を提供する。デバイス10は、シリンジプランジャの引き戻しを、解放可能なワイヤ把持構造30を介したワイヤ24の前進に直接的に結び付けている。滑動部およびプランジャを移動させるために使用される同じ力は、概して、ワイヤを針および作業空間内へと移動させるために使用される同じ力である。つまり、ワイヤ移動の触覚フィードバックがプランジャ、滑動部、および使用者の指に直接的にあるように、デバイス10には介在する機構がない。そのため、ワイヤは、針先端が任意の標的の血管、膿瘍、身体の空洞、または他の空間に入ると、前進させることができる。片手により、使用者はワイヤを標的空間の中に位置決めすることができる。シリンジ本体14の機能、滑動部18を通るシリンジ本体14の中でのシリンジプランジャの移動、および、ループ70を通じてのワイヤの移動は、使用者によって出くわされる唯一の抵抗であり、そのため、処理においてより大きな触覚フィードバックを可能にする。シリンジプランジャの移動と、ワイヤの同時の前進と、の間の直接的な結び付けは、使用者にワイヤがどのように前進しているかのより良好な感覚を与え、ワイヤが適切に前進していない可能性があるというフィードバックをより素早く提供する。例えば、ワイヤが血管の壁もしくは閉塞へと進んでいる場合、または、針がワイヤ前進の前に標的空間から引き抜かれる場合、使用者は、筐体、滑動部、ならびに、筐体12および滑動部18に設けられた把持部分16および22を介して、即時のフィードバックを得られる。さらに、ワイヤ24は、図1に示されているように、シリンジ筐体12またはシリンジプランジャの外部で前進する。本明細書でさらに検討されているように、これは、他の要素を、標的空間84においてワイヤを使用する配置のために、ワイヤに予め搭載することができる。
本デバイス10、および、本明細書に記載されている本発明の他の代替の実施形態は、概して単一の移動を提供する使用について、片手で保持され得る。代替の実施形態では、手ではなくロボットによる係合が使用され得る。ワイヤは、シリンジプランジャを引っ張る同じ手または移動で前進させることができる。使用者がワイヤの前進を制御しており、バネ、レバーの介在、または他の機構がその制御を使用者から取り上げていない。ワイヤがデバイスにおいて感じられるような抵抗を満たす場合、使用者は、プランジャを移動させることと、ワイヤを前進させることと、を停止することができる。さらに、追加の利点は、デバイス10およびその関連する実施形態がより長いワイヤが使用されることを許容することである。ワイヤ前進機構34、具体的にはループ案内部70または他の案内構造は、ワイヤの所望の長さに基づいて構成および寸法決定され得る。そのため、追加のワイヤが、本明細書においてさらに検討されているようにワイヤを通じての標的空間への導入のために、カテーテル/シースおよび拡張器をワイヤに予め搭載させることができる。本発明の他の特徴によれば、異なる大きさのシリンジ本体14が、滑動部およびワイヤ把持構造30の移動に基づいてワイヤのより大きい移動またはより小さい移動に相関される標的空間からの流体の異なる量で使用されてもよい。つまり、より大きい直径を有するシリンジ本体14およびシリンジプランジャが使用される場合、より多くの空気/流体が、滑動部を後方へ並進させ、シリンジプランジャを特定の距離において後退位置へと移動させるために必要とされる。ワイヤを所望の距離で前進させるために、シリンジを通る空気/流体の量をより最小限とすることが好ましい場合、より小さい直径のシリンジ本体14およびシリンジプランジャ20が使用され得る。ワイヤを流体の引き込みから独立して前進させることができるように、ワイヤとシリンジとが連結しないことと、流体の引き込みに適合する能力と、は、標的空間が小さい場合、有用である。相当の流体の引き込みが標的空間を潰してしまう可能性がある場合、過剰な引き込みなしでワイヤを移動させる、または、さらなる引き込みから独立してワイヤを移動させるこの能力は、有利である。
本発明では、使用者の片手で、標的空間への進入が決定でき、滑動部18およびシリンジプランジャ20が後退位置へと後方へ移動させられる一方で、ワイヤは、同時に、概して単一の行程で、前方に前進させられる。さらに、ワイヤを前進させるために使用される力が、使用者によって直接的に作り出され、したがって、ワイヤを前進させるバネまたはレバーなどの他の機構と対照的に、より繊細かつ正確に加えることができる。つまり、デバイス10を使用して、プランジャを引き込み、ワイヤを前進させるための概して1:1の力の割合がある。これは、デバイスの使用およびワイヤの移動において、使用者の手を通じて使用者に非常に敏感なフィードバックを提供する。
本デバイス10と、他の開示されている実施形態と、は、ある範囲の針の大きさ、シリンジ本体の大きさ、およびワイヤの大きさで使用できる。先細りのワイヤが、針内の流体を、ワイヤを越えてシリンジ本体へと容易に進行させるために、ワイヤ要素のために使用されてもよい。さらに、コイル状のワイヤ先端を伴うワイヤが利用されてもよく、一方で、ワイヤの残りの部分は滑らかである。その方法では、ワイヤの周りの封止は気密とできるが、流体/空気は、ワイヤの先端の周りから針へとより容易に進むことができる。述べられているように、筐体12とシリンジ本体14とは1つの要素となるように形成され得る。同様に、滑動部18とシリンジプランジャ20とは1つの要素として一体に形成され得る。そのため、把持部分を伴うシリンジプランジャとワイヤ把持構造とは、構成要素の所望の相互作用を提供するために、シリンジ本体をそれ自体の把持部分と係合させることになる。代替で、筐体12と滑動部18とは、シリンジ構成要素とは別に構成されてもよい。このような場合、シリンジ本体14は、適切に構築された筐体12と嵌まる、スナップ留めする、または他の連結をすることになり、一方、シリンジプランジャ20は、滑動部に適切に嵌まる、スナップ留めする、または他の連結をすることになり、滑動部18とシリンジプランジャとが開示されているように相互作用する。
図1および図2Aに示されているようなワイヤ把持構造30は、その遠位端28においてワイヤ24を摩擦で把持または締め付けるために、合わさるように付勢された対向するクランプ端33、35を伴うクランプ式の構造であり得る。図1に示されているようなレバー構造31が、ワイヤ24を把持または解放するために、クランプ端33、35を開閉するように動作させることができる。クランプ端の対は、ワイヤの遠位端を解放可能に把持するために利用されてもよい。把持は、使用者の手の力の下で滑動部18およびプランジャを後退位置へと移動させるときにワイヤの必要な移動を提供するのに十分なきつさでなければならない。他のワイヤ把持構造またはワイヤ留め構造が、ワイヤがプランジャ/滑動部の移動から解放可能である限り使用されてもよい。
本発明は、使用者の片手を利用して人間工学的な利点および安定性を提供する。筐体12から延びる把持部分16は、例えば、親指と、人差し指、中指、および薬指のうちの1つまたは複数と、に、デバイスを保持させ、シリンジ本体を安定化させることができる。滑動部18の前方の端に位置決めされた把持部分22は、同じ手の人差し指に、プランジャを容易かつ快適に移動させて負圧を引き込ませ、次に、標的空間に入る針においてワイヤを続いて前進させることができる。親指と、1つまたは複数の人差し指、中指、および薬指と、は、デバイス10およびシリンジ本体をしっかりと支持することができ、一方、人差し指は、滑動部、シリンジプランジャ、およびワイヤの動きを別に制御することができる。これは、ワイヤが同時に前進させられている間に、標的空間からの針の除去を防止するために使用者に針先端を非常に安定して維持させることができる。
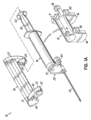
図5は、デバイス10と同様であるが、カテーテル、拡張器、または他の要素が予め搭載されているワイヤの、人の脈管構造などの組織における標的空間内への前進および位置決めを提供するデバイス110の代替の実施形態を示している。本発明の他の実施形態と同様に、このようなワイヤの前進は、いくつかの異なる医療処置のために使用できる。デバイス10とデバイス110との間の同様の要素は、共通の要素についていくつかの共通の参照符号を共有する。デバイス110は、シリンジ本体14、および、使用者による係合のための把持部分16を含むか、または、シリンジ本体14および把持部分16と連結するように構成される筐体112を備える。デバイス10と同様に、筐体および把持部分は、1つのシリンジ本体の一部であり得る、または、本体とは別体であり得る。滑動部18は、筐体14に隣接して位置決めされ、プランジャの一部である、または、シリンジプランジャ20と連結するように構成される。シリンジプランジャ20は、例えば、図6Bに示されているような前方位置と、図6Cに示されているような後退位置と、の間で、シリンジ本体14の内部で移動する。滑動部18は、滑動部18およびシリンジプランジャ20を筐体112に対して移動させるために、使用者による係合のための把持部分22も備える。明確には、滑動部18は、デバイス10の使用の間に、シリンジプランジャ20を前方位置から後退位置へと移動させる。本明細書に記載されているように、筐体112は、ワイヤ前進機構の前でカテーテル構成を受け入れるように寸法決定され得る。
デバイス110もワイヤ24を備える。ワイヤ24は近位端26と遠位端28とを備える。滑動部18も、本明細書に記載されているようなワイヤの移動を容易にするために、ワイヤの遠位端28を解放可能に把持するワイヤ把持構造30を備える。図5に示されているデバイス110の実施形態では、ワイヤ24には、ワイヤによって案内されるように組織における標的空間へと挿入される他の構成要素が予め搭載されている。明確には、図5に示されているように、拡張器102とカテーテル100と(つまり、カテーテル装置)がワイヤに搭載されている。カテーテル100は、カテーテルが使用される医療処置に応じて、カテーテルへと送り込まれる1つまたは複数のポート104を備え得る。針132は、シリンジ本体14と連結され、本発明の特徴によれば、ワイヤの近位端26を脈管構造空間などの作業空間内へと案内するようにも構成されている。デバイス10と同様に、針132ならびに本体から離れるような後方への滑動部18およびシリンジプランジャ20の移動は、負圧を引き込むことになり、ワイヤ24を、針132の孔を通じて、脈管構造または他の標的空間内へと単一の移動で前進させようともする。
そのために、ワイヤ前進機構134が、図1において見られるように、概して滑動部18と筐体112との間に連結される。ワイヤ前進機構134は、ワイヤを案内し、図6Cに示されているように滑動部18がシリンジプランジャ20を前方位置から後退位置へと移動させるとき、ワイヤの近位端26を針132内へと前方に前進させるように構成されている。
ワイヤ前進機構の目的は、1回の移動の行程において、滑動部18の後方への移動、および後退位置へのシリンジプランジャ20の付随する移動を反転させ、または変換し、ワイヤ24の針134の中への前方への移動、および針134を通じての前方への移動を作り出すことである。本明細書に記載されているように、人の作業者の手、またはロボットなどの何らかの他の機構が、筐体および滑動部のそれぞれの把持部分16および22と係合し、図6Bおよび図6Cに示されているように、滑動部18を筐体に沿って後退位置に向けて後方へ移動させる。滑動部18のワイヤ把持構造30はワイヤの遠位端28を把持する。滑動部18およびシリンジプランジャ20の後退位置への移動は、ワイヤの遠位端28をワイヤ前進機構134に向けて移動させる。ワイヤ前進機構は、ワイヤ遠位端のその後方への移動を、ワイヤ近位端26の針132の中への前方への移動、および針132を通じての前方への移動へと反転させる、または変換する。滑動部18およびプランジャ20が後退位置へと移動させられるとき、ワイヤの近位端26は、針を通じて同時に前進させられ、最終的には、本明細書に記載されているように、針が挿入される標的空間内へと前進させられる。
図5~図6Jに示されている実施形態では、筐体112は、筐体112のさらに後方にワイヤ前進機構134を引き離すように構成されている。本発明によれば、ワイヤ前進機構134は、機構34と同様に動作し、ワイヤを案内し、滑動部がシリンジプランジャを前方位置から後退位置へと移動させるときに、ワイヤの近位端を、針の中へと前方に前進させ、針を通じて前方に前進させるように構成される。ワイヤ前進機構134は、拡張器102およびカテーテル100のような他の要素を、作業空間へと挿入する前にワイヤに予め通すこと、または予め位置決めすることを可能とするように、位置決めされる。筐体はカテーテル装置を固定するように構成される。そのため、これは、カテーテルに、ワイヤの配置で即時に配置することを提起する。ワイヤ前進機構134は、ループ案内部170も備え、滑動部18およびシリンジプランジャの後方または後退の移動に対するワイヤ近位端の前方への変換を提供するように、滑動部18と筐体112との間に概して位置決めされる。明確には、図5を参照すると、ワイヤ前進機構134は、滑動部18のワイヤ把持構造30からワイヤを受け入れるように位置決めされる入力端または遠位端172と、ワイヤ24の近位端を案内し、ワイヤを、カテーテル100の中へ、かつカテーテルを通じて出力し、最終的には針装着部150の中へ、かつ針装着部150を通じて出力し、そして最終的に針132の中へ、かつ針132を通じて出力するための出力端または近位端174と、を有するループ案内部170を備える。ループ案内部170は、図5に示されるような閉じた管であり得る。代替で、ループ案内部は、ワイヤ24を捕らえて遠位端172から近位端174へとループ案内部を通じて案内するための適切な構成および構造で開放していてもよい。図5に示されているように、筐体12は、ループ案内部170のそれぞれの遠位端172および近位端174と相互作用し、遠位端172および近位端174を収容する装着部分176、178を備えるように適切に形成され得る。デバイスの実施形態110では、カテーテル装置を取り扱うために必要とされるクリアランスのため、筐体112は、装着部分176から後方において装着部分178を位置決めするために、筐体において後方に延びる延長区域201を含む。この方法では、ワイヤが針132上へのその経路においてカテーテル装置を通過することができるように、カテーテル装置100、102をワイヤ前進機構134の前方に位置決めするために、空間が装着部分178の前方に作り出される。つまり、ワイヤ前進機構がカテーテル装置の後方に位置する。より明確には、機構134の出力端または近位端174はカテーテル装置の後に位置し、そのため、ワイヤは出力端から出てカテーテル装置に直接的に入ることができる。カテーテル装置を固定するために、1つまたは複数の追加の装着区域180が、カテーテル装置の一部分を保持するために、筐体12において、および/または、延長区域201において、実施されてもよい。図5を参照すると、追加の装着区域180は、カテーテル装置を作り上げる要素を受けるために形成されたスロット181を有し得る。カテーテル装置は、スロット181へとスナップ留めされ得る、または他の方法で固定され得る。デバイス10と同様の様態において、滑動部/プランジャの矢印62の方向での移動によって、シリンジ本体14を通じて負圧または真空を引き込むことができ、同時に、ワイヤの近位端26は、矢印63の方向において、または、本明細書に記載されているような脈管構造または他の作業空間内への針32の移動の方向において、前進することになる。
デバイス110の実施形態では、針構造は、デバイス10と同じ様態でワイヤから滑り出して取り外しできないという事実を受け入れる必要がある。これは、カテーテル装置100、102が針の後に位置し、針が後方に滑動させられ、ワイヤから取り外されるのを防止するためである。むしろ、デバイス110は、ワイヤから取り外すために、壊して外され得る、または分解され得る針132および針装着部150を実装している。より明確には、針装着部150は、針装着部をワイヤ24から取り外してカテーテル装置をワイヤにおいて作業空間における位置へと滑動させるために、半体またはより小さい区域への針装着部の分離を許容する、切込み線151に沿ってなどの脆弱区域を組み込み得る。針132は、針装着部150および針132の全体の取り外しを容易にするために、剥がし取りの針または壊し外しの針の形態でもある。
より明確には、デバイス110は、針132をデバイスと連結するための適切な針装着部150を備える。具体的には、針装着部150は、針132をシリンジ本体14とワイヤ24との両方と同時に連結させる。図6Eを参照すると、針装着部150は、針132の中へのワイヤ24の移動および針132を通るワイヤ24の移動を方向付けるために、案内通路152を備える。針装着部150は、シリンジプランジャが図6Eに示されているように後退位置へと移動させられるとき、針に負圧を作り出すためにシリンジ本体14と連結される真空通路154も備える。本明細書において記載されているように、後退位置への滑動部およびシリンジプランジャの移動は、後退位置への滑動部およびシリンジプランジャの後方への移動を防止するために、針装着部150を通じて針132の中に負圧を引き込む。針が組織を通じて脈管構造または他の作業空間へと貫通すると、針先端はもはや塞がれも閉塞もされず、作業空間からの空気/流体が針およびシリンジ本体へと引き込まれるように負圧が破壊される。そのため、滑動部およびシリンジプランジャは、流体/空気が針を通じて引っ張られるとき、後退位置へとデバイス110において後方へと容易に引き込まれ得る。滑動部/プランジャの移動は、ワイヤ把持構造30を針132に対して後方へ同時に移動させもし、それによって、ワイヤ前進機構134を通じてワイヤ24を押す。これは、ワイヤの移動を転回、反転、または変換し、図6Dに示されているように、針132を通じてワイヤの近位端26を前方へ前進させる。
図5に示されている本発明の実施形態において、針装着部150は、真空通路154に加えて案内通路152において、両方で気密な通路を作り出す。針孔が、ワイヤ24が針の中で前方へ移動するとき、針132を通じた空気および/または流体の同時の後方への通過に加えて、針132を通るワイヤ24の通過を許容するように、針132は寸法決定される。針装着部150は、真空通路54、針の内部通路133、およびワイヤ24のための案内通路52についての交差点160を形成している。そのため、装着部150は、図1に示されている針装着部50と同様に動作する。そのために、針装着部150は、案内通路に気密封止を提供するために案内通路152およびワイヤ24と係合する封止機構164も備える。つまり、封止機構は、図6Eに示されているように、負圧ならびに/または流体および空気がシリンジ本体14の中のプランジャ20の移動を通じて引き込まれているときに同時に、ワイヤ24が針装着部の案内通路および針32を通じて移動することができるように、ワイヤ24が封止機構を通過して案内通路152へと入るときにワイヤ24と係合する。
本発明の一態様によれば、筐体112とシリンジ本体14とは、筐体がシリンジ本体の一部である1つの構造として形成され得る。本発明の他の実施形態では、筐体は、シリンジ本体が筐体の把持部分16に対して適切な位置にある状態で、別体のシリンジ本体と連結するように構成される。同様に、滑動部18は、シリンジプランジャが移動させられるときに滑動部およびワイヤ把持構造が移動させられるように、単一の要素としてシリンジプランジャと一体に形成され得る。代替で、滑動部18は、一方の移動を他方へと結び付け、ワイヤの移動をプランジャと結び付けるために、別々のシリンジプランジャに連結するように形成されてもよい。その方法では、筐体12および滑動部18を伴うデバイスは、図1Aに示されているようなシリンジ本体およびシリンジプランジャを有する典型的なシリンジを利用し得る。
図6A~図6Jは、図5に示されているようなデバイス110の実施使用を示している。デバイス110は、標的空間への案内ワイヤ、カテーテル、および他の要素の送達のためのすべて一体になった解決策を提供する。図6Aを参照すると、使用中、デバイス110は、カテーテル100、拡張器102、およびワイヤ24に予め搭載または位置決めされるポート104など、他の要素が搭載される。述べられているように、図6Aに示されている例および要素は限定ではなく、他の要素がワイヤ24に予め搭載されてもよい。筐体112は、カテーテル組立体が搭載され得る装着区域180を備える。例えば、装着区域180はカテーテル100にクリップ留めし得る。ワイヤ24は、前進機構134およびカテーテル構成を通じて、針132内へと通すことができる。ワイヤ把持構造30は、ワイヤの近位端が針132内へと通される間、遠位端を把持するように操縦され得る。図6Bは、カテーテル装置およびワイヤがデバイス110を利用する処置の実施のために筐体112と一列になるようにカテーテル装置およびワイヤが搭載されているデバイス110を示している。図6Cに示されているように、デバイス110が使用されるとき、把持部分16および22は係合させられ、矢印62の方向への使用者の指の移動によって、圧力が滑動部18および把持部分22に加えられる。ワイヤ26は標的空間内へと前進させられ得る。図4Bに関して本明細書で検討されているように、ワイヤは、負圧が解放されると標的空間内へと前進することになり、プランジャおよび滑動部18は、シリンジ本体および筐体112に対して後方により自由に滑動することができる。図6Dに示されているように、ワイヤは、滑動部18が後退位置に向けて反対方向にさらに移動させられるとき、矢印63の方向において前進することになる。そのため、これは、標的空間内へのカテーテル装置のさらなる挿入に向けて、案内ワイヤをカテーテル装置と一列に位置決めする。図6Eおよび図6Fを参照すると、デバイス110は、ワイヤが作業空間内へと位置決めされると、カテーテル装置およびワイヤ24から取り外され得る。
図6Eおよび図6Fは、針による標的空間への貫通と、矢印15によって示されているようにシリンジ本体14への空気または流体の引き込みと、の後、ワイヤが標的空間の中で適切に位置決めされると、デバイス110がもはや必要とされないことを示している。カテーテル装置はデバイス110から取り外すことができる。デバイスは針132および針装着部150から取り外すことができる。図6Fは、デバイス110が取り外された状態での露出されたカテーテル100、拡張器102、およびワイヤ24を示している。針装着部150は、針132と共に所定位置に残っている。作業空間のワイヤ24の部分上およびその後ろにおけるカテーテルおよび拡張器の一列の位置のため、針装着部150および針132は、ワイヤ24の端から簡単に滑り落とすことはできない。そのために、ワイヤと一列のカテーテル装置との両方を伴うデバイス110の使用において、針装着部150および針132は、ワイヤ24から壊して外されなければならない、または引き裂いて外されなければならない。
図6Gを参照すると、針およびワイヤが、入口位置83を通じてなど、組織82を通じて作業空間84に入ると、針は矢印85によって示されているように引き抜かれてよく、ワイヤ24だけが作業空間84の中の所定位置に残される。しかしながら、針装着部150と針132とは、カテーテル100および拡張器102、または、ワイヤ24におけるカテーテル装置の任意の他の要素の前進を許可するために、壊して外されなければならない。そのため、カテーテル装置は、図6Hに示されているように矢印87の方向に進行することができる。そのようにするために、針装着部150の端は、図6Hに示されているように、掴んで引き裂いて離すことができる。概して、針132は、ワイヤ24を自由にするために、分割させることができる、または少なくとも1つの側方への引っ張り外し部を有することができる、壊して外す針または剥がし取ることができる針である。針装着部は、図6Hに示されているように分離させるために、切込み線151に沿ってなど、脆弱化されもする。針装着部の2つの部品150aおよび150bは、針132のそれぞれの半体と共に、図6Hに示されているような矢印89の方向において引っ張り離すことができる。図11~図13に示されているように二重バレル針が使用される場合、針の一方の側が剥がし取られてもよい。次に、針および装着部が除去される。拡張器102およびカテーテル100は、針が作り出した同じ組織の入口位置83を通じてなど、ワイヤ24に沿って作業空間84の中へと滑動させることができる。図6Iを参照すると、拡張器102およびカテーテル100は、作業空間84の中においてワイヤ24に沿う位置で示されている。カテーテル100が適切に位置決めされると、ワイヤ26および拡張器102は、図6Jに示されているように引き抜くことができ、そのため、カテーテル100およびそれぞれのポート104は所定位置にあり、所望の医療処置のために利用することができる。
図5における予め搭載されたカテーテル装置の1つの利点は、停止構造13がワイヤの後端または遠位端に配置され得ることである。このような停止構造13は、カテーテル装置がワイヤの後部から落下するのを防止することができる、または、ワイヤの後端が皮膚を越えて引っ張られることになるのを防止することができる。針および装着部が壊して外れる、または剥がし外れることで、針をワイヤから取るように滑動させる必要性を排除するため、停止構造が実施されてもよい。本発明の他の実施形態は、異なるように位置決めされて動作するワイヤ前進機構だけでなく、プランジャの移動とは反対の方向においてワイヤ26を前進させるための代替のシリンジ本体、針、および針装着部を利用してもよい。明確には、図7~図8Bを参照すると、シリンジプランジャとワイヤとの同時の移動のために、筐体212と、把持部分16と、滑動部218と、ワイヤ把持構造30と、を有する代替のデバイス210が実施されている。しかしながら、図7~図8Bに示されているデバイス210の実施形態では、ワイヤ前進機構234は、滑動部18の端25およびプランジャ20を通じて進行するために、ワイヤ遠位端24を呈するように構成される。図8Aに示されているように、プランジャ20は、ワイヤ24が通って進行することができる内部通路27を含み得る。図示されているように、ワイヤ前進機構234のループ案内部270は、プランジャの端と一致する滑動部の端25において途切れることができ、ワイヤは、滑動部18およびプランジャが矢印62の方向において移動させられるとき、針装着部250および針232と係合するために、シリンジプランジャ20およびシリンジ本体14を通じて案内させられ得る。図8Aに示されているように、ワイヤ24、具体的にはワイヤの遠位端28は、滑動部18と共に移動し、その方向は、図8Bに示されているように、シリンジプランジャ20、シリンジ本体14、および針232を通じて適切な作業空間内へと進行するために、ワイヤ前進機構234によって変更される。つまり、滑動部およびプランジャが矢印62の方向において移動するとき、ワイヤは、本明細書において様々な実施形態で検討されているように、針232を通じて矢印63の方向に移動する。
本発明の代替の実施形態によれば、異なるワイヤ前進機構が利用されてもよい。図1および図5は、ループ案内部を有する物を示している。図9および図10は、滑動部がシリンジプランジャを前方位置から後退位置へと移動するとき、ワイヤの近位端をデバイスの針内へと前方へ能動的に前進させるように構成されている代替のものを示している。図9および図10に示されているようなデバイス310の実施形態では、前進機構は、ループ案内部70のような受動的な機構ではなく、能動的な機構である。明確には、筐体312は、移動可能なラック歯車330を備えるように構成されている。滑動部318は、対向するラック歯車332を備えるように構成されている。ラック歯車330は、滑動部318およびラック歯車332が図10に示されているように矢印62の方向において後退位置へと移動させられるとき、筐体312に沿って矢印63の方向において平行移動するように構成されている。ピニオン歯車340が、2つのラック歯車330、332の間で筐体312に対して回転可能に装着される。ピニオン歯車は、滑動部318におけるラック歯車332が滑動部およびプランジャの移動の間に平行移動されるとき、矢印341の方向に回転する。さらに、ピニオン歯車340は、矢印63の方向において平行移動される移動可能なラック歯車330に作用する。移動可能なラック歯車330は、ワイヤ24の遠位端28を掴むワイヤ把持構造331を備える。滑動部318およびプランジャが後退位置へと移動させられるとき、移動可能なラック歯車330およびワイヤ把持構造331は矢印63の方向に平行移動され、それによって、針装着部50および針32を通るワイヤ24を、本発明の特徴に従って平行移動させる。そのため、図9および図10に示されているようなワイヤ前進機構334は、方向の受動的な変更ではなく、プランジャの後退においてワイヤの能動的な前方への移動を組み込む実施形態を示している。このようにして、本明細書で図示および記載されているようなワイヤ前進機構は、ワイヤの方向を滑動部およびプランジャの方向から受動的に反転させるのではなく、ワイヤを能動的に移動させることができる。ワイヤ前進機構の能動的または歯車付きのものの1つの追加的な使用は、滑動部およびプランジャを後退位置へと移動させるときの手の移動が、作業空間におけるワイヤの移動の速度(増加または減少)と、使用者の手へのワイヤ移動の力のフィードバック(増加または減少)と、の両方において調整され得るように、ラック歯車およびピニオン歯車が使用者へのフィードバックを増加させるように調整および構成され得ることである。受動的なワイヤ前進機構の現在の使用は、手の力とワイヤ移動の力との1:1の割合を提供し得る。図9~図10に示されているような能動的なワイヤ前進機構は、例えば、歯車に基づいて、より高いかまたはより低い力の割合を提供することができる。
図11~図13は、本発明の態様による針装着部および針の代替の実施形態を示している。例えば、図1および図5に示されているような針装着部50および150は、ワイヤが針の孔を通じて移動するとき、負圧がシリンジ本体14の針装着部およびプランジャ20を通じ、同じ孔を通じて引き込まれ得るように、移動可能なワイヤ24に対して封止を提供するために、封止機構64を組み込んでいる。代替で、負圧を引き込むために使用される通路が、ワイヤを前進させる通路と異なるように、複数の通路を伴う針が実施されてもよい。図11~図13を参照すると、二重の針がその目的のために示されている。明確には、二重の針500は、シリンジ本体14を利用して負圧または真空を引き込むための針部分または針通路502を組み込んでいる。別の針部分または針通路504が、本発明による滑動部/プランジャを後退位置へと移動させての前進のために、ワイヤ24を受け入れる。そのために、針装着部506は、負圧が針通路502を通じて引き込まれ得る一方で、同時にワイヤ24が針通路504を通じて前進するように構成されている。そのために、通路502、504は、概して平行であり、組織および作業空間への貫通のための共通の尖った先端510を共用する。針装着部506が、負圧を最初に引き込み、続いて、プランジャを後退位置へと移動させ、ワイヤ24を針へと前方に移動させるために、針の適切な配置において滑動部/プランジャを解放するために、シリンジ本体14の先端と連結するための適切な開口512を組み込んでいる。
図14は、本発明のデバイスのための針装着部および針構成の他の代替の実施形態を示している。針装着部650は、針32を、前進するワイヤと一列ではなく、シリンジと一列になるように装着する。そのために、真空通路654は、真っ直ぐであり、シリンジの先端15内へと送り込む。ワイヤ案内通路652は、本発明によれば、前進するワイヤを針32へと同時に送り込むために、弧状にされる、または他の形で斜めにされる。
本発明は、中心静脈カテーテルを配置するための案内ワイヤとしてワイヤを配置するために使用され得るが、他の目的および技術のためにも使用できる。例えば、本発明は、流体回収のために、胸腔穿刺および穿刺のために、ならびに、セルディンガー法が用いられる、または、ワイヤまたはカテーテルが身体において配置される他の使用のために、ピグテール胸腔チューブ、ピグテールドレンを配置するために使用され得る。本発明は、限定されることはないが、例えば、血管造影、中心静脈ライン配置、動脈ライン配置、画像誘導経皮的胃瘻チューブ配置、小口径胸部チューブ留置、ペースメーカリード線の挿入、中心静脈圧モニタの挿入、心臓アブレーション処置、経皮ドレン配置、PICC留置、植込み型除細動器の挿入、REBOA(大動脈の蘇生バルーン閉塞)、血管内透析瘻孔作成、および他の血管内処置(EVAR、TEVAR、TAVR、血栓塞栓除去術、血管内ステント配置、血栓溶解)のためのワイヤの配置のために使用されてもよい。配置されたワイヤは、他の要素を所定位置へと案内するために案内ワイヤとして使用され得る、または、ワイヤは、医療処置のために作業空間に残される要素であり得る。
本発明は、様々の実施形態の記載によって図示されており、これらの実施形態はいくらか詳細に記載されているが、添付の請求項の範囲をこのような詳細に制限すること、または何らかの形で限定することは、本発明者の意図するところではない。したがって、追加の利点および改良が当業者には容易に思い付くことになる。本発明の様々な特徴は、使用者の要求および好みに依存して、単独または組み合わせで使用され得る。
10 デバイス
11 案内要素
12 筐体
13 停止構造
14 シリンジ本体
15 先端
16 把持部分
17 開口、空洞、通路
18 滑動要素、滑動部
19 内部空間
20 シリンジプランジャ
21 停止部
22 把持部分
23 端
24 ワイヤ
25 端
26 ワイヤ近位端
27 内部通路
28 ワイヤ遠位端
29 凹み
30 ワイヤ把持構造
31 レバーアーム、レバー構造
32 針
33 針孔、針先端
33、35 クランプ端
34 ワイヤ前進機構
40 手
50 針装着部
52 案内通路
54 真空通路
60 交差点
64 封止機構
70 ループ案内部
72 入力端、遠位端
74 出力端、近位端
76、78、80 装着区域
82 皮膚、組織、皮下組織
84 内部通路、作業空間、標的空間
100 カテーテル
102 拡張器
104 ポート
110 デバイス
112 筐体
132 針
133 内部通路
134 ワイヤ前進機構
150 針装着部
150a、150b 針装着部の部品
151 切込み線
152 案内通路
154 真空通路
160 交差点
170 ループ案内部
172 入力端、遠位端
174 出力端、近位端
176、178 装着部分
180 装着区域
181 スロット
201 延長区域
210 デバイス
212 筐体
218 滑動部
234 ワイヤ前進機構
270 ループ案内部
310 デバイス
312 筐体
318 滑動部
330、332 ラック歯車
331 ワイヤ把持構造
340 ピニオン歯車
500 二重の針
502、504 針部分、針通路
510 先端
512 開口
650 針装着部
652 ワイヤ案内通路
654 真空通路
11 案内要素
12 筐体
13 停止構造
14 シリンジ本体
15 先端
16 把持部分
17 開口、空洞、通路
18 滑動要素、滑動部
19 内部空間
20 シリンジプランジャ
21 停止部
22 把持部分
23 端
24 ワイヤ
25 端
26 ワイヤ近位端
27 内部通路
28 ワイヤ遠位端
29 凹み
30 ワイヤ把持構造
31 レバーアーム、レバー構造
32 針
33 針孔、針先端
33、35 クランプ端
34 ワイヤ前進機構
40 手
50 針装着部
52 案内通路
54 真空通路
60 交差点
64 封止機構
70 ループ案内部
72 入力端、遠位端
74 出力端、近位端
76、78、80 装着区域
82 皮膚、組織、皮下組織
84 内部通路、作業空間、標的空間
100 カテーテル
102 拡張器
104 ポート
110 デバイス
112 筐体
132 針
133 内部通路
134 ワイヤ前進機構
150 針装着部
150a、150b 針装着部の部品
151 切込み線
152 案内通路
154 真空通路
160 交差点
170 ループ案内部
172 入力端、遠位端
174 出力端、近位端
176、178 装着部分
180 装着区域
181 スロット
201 延長区域
210 デバイス
212 筐体
218 滑動部
234 ワイヤ前進機構
270 ループ案内部
310 デバイス
312 筐体
318 滑動部
330、332 ラック歯車
331 ワイヤ把持構造
340 ピニオン歯車
500 二重の針
502、504 針部分、針通路
510 先端
512 開口
650 針装着部
652 ワイヤ案内通路
654 真空通路
Claims (20)
- ワイヤを組織作業空間内へと送達するためにシリンジ本体およびプランジャと相互作用するためのデバイスであって、
前記シリンジ本体と連結するように構成され、前記ワイヤの近位端を前記組織作業空間内へと案内するための少なくとも1つの孔を有する針と、
前記シリンジ本体と連結するように構成され、使用者による係合のための部分を少なくとも1つ備える筐体と、
前記シリンジプランジャを前方位置と後退位置との間で移動させるために前記シリンジプランジャと連結するように構成される滑動部であって、使用者による係合のための部分を少なくとも1つ備える、滑動部と、
を備え、
前記滑動部は、前記滑動部が前記シリンジプランジャを前記前方位置から前記後退位置へと移動させるときに、前記ワイヤの遠位端を移動させ、前記ワイヤの前記近位端を前記針内において前方に前進させるために、前記遠位端と解放可能に連結される、デバイス。 - 前記滑動部は、前記ワイヤの前記遠位端を前記シリンジプランジャと共に移動させるために、前記ワイヤの前記遠位端を解放可能に把持するためのワイヤ把持構造を備える、請求項1に記載のデバイス。
- 前記滑動部が前記シリンジプランジャを前記前方位置から前記後退位置へと移動させるときに前記ワイヤの前記近位端を前記針内において前方に前進させるために、前記ワイヤ遠位端の前記移動を変換するためのワイヤ前進機構をさらに備える、請求項1に記載のデバイス。
- 前記ワイヤ前進機構は、前記ワイヤ移動の方向を反転させ、前記ワイヤ近位端を前進させるために前記ワイヤ遠位端の前記移動を変換するためのループ案内部を備える、請求項3に記載のデバイス。
- 前記ループ案内部は、前記滑動部の前記把持構造からのワイヤを受け入れるように位置決めされる遠位端と、前記ワイヤの近位端を前記針内へと案内するための近位端と、を有する、請求項4に記載のデバイス。
- 前記針内における前記ワイヤの移動を方向付けるための前記少なくとも1つの針孔と連結させられる案内通路と、前記シリンジプランジャが前記後退位置へと移動させられるときに前記少なくとも1つの針孔に負圧を作り出すために前記シリンジ本体と連結するための真空通路と、を含む針装着部をさらに備える、請求項1に記載のデバイス。
- 前記案内通路は気密である、請求項6に記載のデバイス。
- 前記案内通路は、前記針内における前記ワイヤの移動のために、前記針と一列に位置決めされる、請求項6に記載のデバイス。
- 前記針は2つの通路を含み、前記針通路のうちの第1の通路は前記案内通路と連結され、前記針通路のうちの第2の通路は前記真空通路と連結される、請求項6に記載のデバイス。
- 前記ワイヤ前進機構は、前記前方位置から前記後退位置への前記シリンジプランジャの移動が前記ワイヤの前記近位端を前記針内において前方に移動させるように前記ワイヤの前記遠位端を前記滑動部と解放可能に連結する歯車システムを備える、請求項1に記載のデバイス。
- カテーテルを組織作業空間内へと送達するためにシリンジ本体およびプランジャと相互作用するためのデバイスであって、
ワイヤと、
前記ワイヤ上において通されるカテーテルと、
前記シリンジ本体と連結するように構成され、前記ワイヤの近位端を前記組織作業空間内へと案内するための少なくとも1つの孔を有する針と、
前記シリンジ本体と連結するように構成され、使用者による係合のための部分を少なくとも1つ備える筐体であって、前記カテーテルを解放可能に固定する、筐体と、
前記シリンジプランジャを前方位置と後退位置との間で移動させるために前記シリンジプランジャと連結するように構成される滑動部であって、使用者による係合のための部分を少なくとも1つ備える、滑動部と、
を備え、
前記滑動部は、前記滑動部が前記シリンジプランジャを前記前方位置から前記後退位置へと移動させるときに、前記ワイヤの遠位端を移動させ、前記カテーテルおよび前記針を通じて前記ワイヤの前記近位端を作業空間内へと前方に前進させるために、前記遠位端と解放可能に連結され、
前記カテーテルは、前記筐体から解放され、前記ワイヤに沿って前記作業空間内へと滑動させられるように構成される、デバイス。 - 前記滑動部は、前記ワイヤの前記遠位端を前記シリンジプランジャと共に移動させるために、前記ワイヤの前記遠位端を解放可能に把持するためのワイヤ把持構造を備える、請求項11に記載のデバイス。
- 前記滑動部が前記シリンジプランジャを前記前方位置から前記後退位置へと移動させるときに前記ワイヤの前記近位端を前記カテーテルおよび前記針内において前方に前進させるために、前記ワイヤ遠位端の前記移動を変換するためのワイヤ前進機構をさらに備える、請求項11に記載のデバイス。
- 前記ワイヤ前進機構は、前記ワイヤ移動の方向を反転させ、前記ワイヤ近位端を前進させるために前記ワイヤ遠位端の前記移動を変換するためのループ案内部を備える、請求項13に記載のデバイス。
- 前記カテーテルとともに前記針上において通される拡張器をさらに備える、請求項11に記載のデバイス。
- 前記針内における前記ワイヤの移動を方向付けるための前記少なくとも1つの針孔と連結させられる案内通路と、前記シリンジプランジャが前記後退位置へと移動させられるときに前記少なくとも1つの針孔に負圧を作り出すために前記シリンジ本体と連結するための真空通路と、を含む針装着部をさらに備える、請求項11に記載のデバイス。
- 前記針および前記針装着部は、前記カテーテルが前記ワイヤに沿って前記作業空間内へと滑動するために、前記ワイヤから離されるように破壊され得る、請求項11に記載のデバイス。
- 前記案内通路は、前記針内における前記ワイヤの移動のために、前記針と一列に位置決めされる、請求項16に記載のデバイス。
- 前記針は2つの通路を含み、前記針通路のうちの第1の通路は前記案内通路と連結され、前記針通路のうちの第2の通路は前記真空通路と連結される、請求項16に記載のデバイス。
- 前記ワイヤ前進機構は、前記カテーテルの後方に位置決めされる出力端を有し、そのため、ワイヤが前記ワイヤ前進機構の前記出力端から出て前記カテーテルに入ることができる、請求項13に記載のデバイス。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202063125913P | 2020-12-15 | 2020-12-15 | |
| US63/125,913 | 2020-12-15 | ||
| US202163215493P | 2021-06-27 | 2021-06-27 | |
| US63/215,493 | 2021-06-27 | ||
| US17/550,483 | 2021-12-14 | ||
| US17/550,483 US20220203075A1 (en) | 2020-12-15 | 2021-12-14 | Wire And Catheter Placement Device |
| PCT/US2021/063546 WO2022132920A1 (en) | 2020-12-15 | 2021-12-15 | Wire and catheter placement device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024500445A true JP2024500445A (ja) | 2024-01-09 |
Family
ID=79283096
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023537623A Pending JP2024500445A (ja) | 2020-12-15 | 2021-12-15 | ワイヤおよびカテーテルの配置デバイス |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220203075A1 (ja) |
| EP (1) | EP4262956A1 (ja) |
| JP (1) | JP2024500445A (ja) |
| AU (1) | AU2021401973A1 (ja) |
| CA (1) | CA3202159A1 (ja) |
| WO (1) | WO2022132920A1 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5579780A (en) * | 1994-10-11 | 1996-12-03 | Zadini; Filiberto P. | Manual guidewire placement device |
| FR2750608B1 (fr) * | 1996-07-04 | 1998-11-06 | Vygon | Dispositif pour la mise en place d'un guide dans une veine au moyen d'une aiguille de ponction, notamment en vue de l'introduction d'un catheter selon la methode de seldinger |
| US6371944B1 (en) * | 1999-04-26 | 2002-04-16 | Xuanli Liu | Percutaneous needle with entry for insertion of a wire |
| EP2799021B1 (en) * | 2011-12-29 | 2016-11-02 | Yonsei University Wonju Industry-Academic Cooperation Foundation | Guide wire insertion apparatus used in catheterization |
| CN108607150B (zh) * | 2013-01-30 | 2021-01-12 | 血管通路股份有限公司 | 用于静脉穿刺和导管放置的系统和方法 |
| WO2018136436A1 (en) * | 2017-01-17 | 2018-07-26 | Acantha Medical, LLC | Device and method for single-handed access and insertion of an article |
-
2021
- 2021-12-14 US US17/550,483 patent/US20220203075A1/en active Pending
- 2021-12-15 JP JP2023537623A patent/JP2024500445A/ja active Pending
- 2021-12-15 AU AU2021401973A patent/AU2021401973A1/en active Pending
- 2021-12-15 CA CA3202159A patent/CA3202159A1/en active Pending
- 2021-12-15 EP EP21839790.9A patent/EP4262956A1/en active Pending
- 2021-12-15 WO PCT/US2021/063546 patent/WO2022132920A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022132920A1 (en) | 2022-06-23 |
| EP4262956A1 (en) | 2023-10-25 |
| US20220203075A1 (en) | 2022-06-30 |
| AU2021401973A1 (en) | 2023-08-03 |
| CA3202159A1 (en) | 2022-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210008347A1 (en) | Catheter assembly with segmented stabilization system | |
| US5116323A (en) | Arterial catheter | |
| EP0652782B1 (en) | Catheter emplacement apparatus | |
| US5634475A (en) | Guidewire delivery assist device and system | |
| US7153276B2 (en) | Medical device with shield having a retractable needle | |
| US6398743B1 (en) | Medical device for inserting a guide wire having a retractable needle | |
| US6197001B1 (en) | Vascular access device | |
| US6277100B1 (en) | Catheter guide wire introducing device and method | |
| KR20230029890A (ko) | 카테터 어셈블리를 포함하는 신속 삽입 가능한 중심 카테터 및 그 방법(rapidly insertable central catheters including catheter assemblies and methods thereof) | |
| JP5005548B2 (ja) | ガイドワイヤ・アドバンサー組立体 | |
| JP2023524221A (ja) | カテーテル組立体を含む速やかに挿入可能な中心カテーテル及びその方法 | |
| US9289232B2 (en) | Soft tissue tunneling device | |
| JP7224426B2 (ja) | 脈管の管腔/腔内にガイドワイヤを片手で挿入するための挿入デバイス | |
| CA2400195A1 (en) | Catheter handle for controlling the advancement of a guide wire | |
| AU2001257082A1 (en) | Medical device with shield having a retractable needle | |
| JP2005519679A (ja) | 中心静脈カテーテル法または動脈カテーテル法のためのニードル・拡張器組み合わせ装置 | |
| US20220323723A1 (en) | Catheter Placement System with Splittable Anchor | |
| CN116916996A (zh) | 丝材和导管放置装置 | |
| JP2024500445A (ja) | ワイヤおよびカテーテルの配置デバイス | |
| CN215349309U (zh) | 一种静脉穿刺组件 | |
| JP3912460B2 (ja) | カニューラの導入具 | |
| US10603071B1 (en) | Cutting device and related systems and methods | |
| JP6996013B1 (ja) | トラッピングバルーンカテーテル | |
| WO2023200943A1 (en) | Medical device for guidewire placement and related method | |
| WO2023059704A1 (en) | Access device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230815 |