以下、本発明の実施の形態を図面に基づいて説明する。
図11は作業車両1の一実施形態を示す側面図であり、図11は作業車両1の一実施形態を示す平面図である。本実施形態の場合、作業車両1はトラクタである。但し、作業車両1は、トラクタに限定されず、コンバインや移植機等の農業機械(農業車両)であってもよいし、ローダ作業機等の建設機械(建設車両)等であってもよい。
以下、トラクタ(作業車両)1の運転席10に着座した運転者の前側(図11の矢印A1方向)を前方、運転者の後側(図11の矢印A2方向)を後方、運転者の左側を左方、運転者の右側を右方として説明する。また、作業車両1の前後方向に直交する方向である水平方向を車体幅方向として説明する。
図11に示すように、トラクタ1は、車体3と、原動機4と、変速装置5とを備えている。車体3は走行装置7を有していて走行可能である。走行装置7は、前輪7F及び後輪7Rを有する装置である。前輪7Fは、タイヤ型であってもクローラ型であってもよい。また、後輪7Rも、タイヤ型であってもクローラ型であってもよい。
原動機4は、ディーゼルエンジン、電動モータ等であって、この実施形態ではディーゼルエンジンで構成されている。変速装置5は、変速によって走行装置7の推進力を切換可能であると共に、走行装置7の前進、後進の切換が可能である。車体3には運転席10が設けられている。
また、車体3の後部には、昇降装置8を含む連結部が設けられている。連結部には、作業装置を着脱可能である。作業装置を連結部に連結することによって、車体3によって作業装置を牽引することができる。作業装置は、耕耘する耕耘装置、肥料を散布する肥料散布装置、農薬を散布する農薬散布装置、収穫を行う収穫装置、牧草等の刈取を行う刈取装置、牧草等の拡散を行う拡散装置、牧草等の集草を行う集草装置、牧草等の成形を行う成形装置等である。
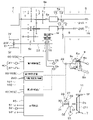
図1に示すように、変速装置5は、主軸(推進軸)5aと、主変速部5bと、副変速部5cと、シャトル部5dと、PTO動力伝達部5eと、前変速部5fと、を備えている。推進軸5aは、変速装置5のハウジングケース(ミッションケース)に回転自在に支持され、当該推進軸5aには、エンジン4のクランク軸からの動力が伝達される。主変速部5bは、複数のギア及び当該ギアの接続を変更するシフタを有している。主変速部5bは、複数のギアの接続(噛合)をシフタで適宜変更することによって、推進軸5aから入力された回転を変更して出力する(変速する)。
副変速部5cは、主変速部5bと同様に、複数のギア及び当該ギアの接続を変更するシフタを有している。副変速部5cは、複数のギアの接続(噛合)をシフタで適宜変更する
ことによって、主変速部5bから入力された回転を変更して出力する(変速する)。
シャトル部5dは、シャトル軸12と、前後進切換部13とを有している。シャトル軸12には、副変速部5cから出力された動力がギア等を介して伝達される。前後進切換部13は、例えば、油圧クラッチ等で構成され、油圧クラッチの入切によってシャトル軸12の回転方向、即ち、トラクタ1の前進及び後進を切り換える。シャトル軸12は、後輪デフ装置20Rに接続されている。後輪デフ装置20Rは、後輪7Rが取り付けられた後車軸21Rを回転自在に支持している。
PTO動力伝達部5eは、PTO推進軸14と、PTOクラッチ15とを有している。PTO推進軸14は、回転自在に支持され、推進軸5aからの動力が伝達可能である。PTO推進軸14は、ギア等を介してPTO軸16に接続されている。PTOクラッチ15は、例えば、油圧クラッチ等で構成され、油圧クラッチの入切によって、推進軸5aの動力をPTO推進軸14に伝達する状態と、推進軸5aの動力をPTO推進軸14に伝達しない状態とに切り換わる。
前変速部5fは、第1クラッチ17と、第2クラッチ18とを有している。第1クラッチ17及び第2クラッチ18は、推進軸5aからの動力が伝達可能であって、例えば、シャトル軸12の動力が、ギア及び伝動軸を介して伝達される。第1クラッチ17及び第2クラッチ18からの動力は、前伝動軸22を介して前車軸21Fに伝達可能である。具体的には、前伝動軸22は、前輪デフ装置20Fに接続され、前輪デフ装置20Fは、前輪7Fが取り付けられた前車軸21Fを回転自在に支持している。
第1クラッチ17及び第2クラッチ18は、油圧クラッチ等で構成されている。第1クラッチ17には油路が接続され、当該油路には油圧ポンプ33から吐出した作動油が供給される第1作動弁25に接続されている。第1クラッチ17は、第1作動弁25の開度によって接続状態と切断状態とに切り換わる。第2クラッチ18には油路が接続され、当該油路には第2作動弁26に接続されている。第2クラッチ18は、第2作動弁26の開度によって接続状態と切断状態とに切り換わる。第1作動弁25及び第2作動弁26は、例えば、電磁弁付き二位置切換弁であって、電磁弁のソレノイドを励磁又は消磁することにより、接続状態又は切断状態に切り換わる。
第1クラッチ17が切断状態で且つ第2クラッチ18が接続状態である場合、第2クラッチ18を通じてシャトル軸12の動力が前輪7Fに伝達される。これにより、前輪7F及び後輪7Rが動力によって駆動する四輪駆動(4WD)で且つ前輪7Fと後輪7Rとの回転速度が略同じとなる(4WD等速状態)。一方、第1クラッチ17が接続状態で且つ第2クラッチ18が切断状態である場合、四輪駆動になり且つ前輪7Fの回転速度が後輪7Rの回転速度に比べて速くなる(4WD増速状態)。また、第1クラッチ17及び第2クラッチ18が切断状態である場合、シャトル軸12の動力が前輪7Fに伝達されないため、後輪7Rが動力によって駆動する二輪駆動(2WD)となる。
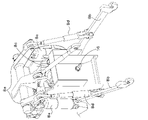
図8に示すように、昇降装置8は、リフトアーム8a、ロアリンク8b、トップリンク8c、リフトロッド8d、リフトシリンダ8eを有している。リフトアーム8aの前端部は、変速装置5を収容するケース(ミッションケース)の後上部に上方又は下方に揺動可能に支持されている。リフトアーム8aは、リフトシリンダ8eの駆動によって揺動(昇降)する。リフトシリンダ8eは、油圧シリンダから構成されている。リフトシリンダ8eは、制御弁29を介して油圧ポンプ33と接続されている。制御弁29は、電磁弁等であって、リフトシリンダ8eを伸縮させる。
ロアリンク8bの前端部は、変速装置5の後下部に上方又は下方に揺動可能に支持されている。トップリンク8cの前端部は、ロアリンク8bよりも上方において、変速装置5の後部に上方又は下方に揺動可能に支持されている。リフトロッド8dは、リフトアーム8aとロアリンク8bとを連結している。ロアリンク8bの後部及びトップリンク8cの後部には、作業装置2が連結される。リフトシリンダ8eが駆動(伸縮)すると、リフトアーム8aが昇降するとともに、リフトロッド8dを介してリフトアーム8aと連結されたロアリンク8bが昇降する。これにより、作業装置2がロアリンク8bの前部を支点として、上方又は下方に揺動(昇降)する。なお、トラクタ1は、車体3が後進したことを
作動条件として昇降装置8を上昇させるオートアップ装置を有している。この実施形態では、オートアップ装置は、リフトシリンダ8e及び制御弁29を含んでいる。
トラクタ1は、測位装置40を備えている。測位装置40は、D-GPS、GPS、GLONASS、北斗、ガリレオ、みちびき等の衛星測位システム(測位衛星)により、自己の位置(緯度、経度を含む測位情報)を検出可能である。即ち、測位装置40は、測位衛星から送信された衛星信号(測位衛星の位置、送信時刻、補正情報等)を受信し、衛星信号に基づいて位置(例えば、緯度、経度)を検出する。測位装置40は、受信装置41と、慣性計測装置(IMU:Inertial Measurement Unit)42とを有している。受信装置41は、アンテナ等を有していて測位衛星から送信された衛星信号を受信する装置であり、慣性計測装置42とは別に車体3に取付けられている。この実施形態では、受信装置41は、車体3に設けられたロプスに取付けられている。なお、受信装置41の取付箇所は、実施形態に限定されない。
慣性計測装置42は、加速度を検出する加速度センサ、角速度を検出するジャイロセンサ等を有している。車体3、例えば、運転席10の下方に設けられ、慣性計測装置42によって、車体3のロール角、ピッチ角、ヨー角等を検出することができる。
図1に示すように、トラクタ1は、操舵装置11を備えている。操舵装置11は、運転者の操作によって車体3の操舵を行う手動操舵と、運転者の操作によらずに自動的に車体3の操舵を行う自動操舵とを行うことが可能な装置である。
操舵装置11は、ステアリングハンドル(ステアリングホイール)30と、ステアリングハンドル30を回転可能に支持するステアリングシャフト(回転軸)31とを有している。また、操舵装置11は、補助機構(パワーステアリング装置)32を有している。補助機構32は、油圧等によってステアリングシャフト31(ステアリングハンドル30)の回転を補助する。補助機構32は、油圧ポンプ33と、油圧ポンプ33から吐出した作動油が供給される制御弁34と、制御弁34により作動するステアリングシリンダ35とを含んでいる。制御弁34は、例えば、スプール等の移動によって切り換え可能な3位置切換弁であり、ステアリングシャフト31の操舵方向(回転方向)に対応して切り換わる。ステアリングシリンダ35は、前輪7Fの向きを変えるアーム(ナックルアーム)36に接続されている。
したがって、運転者がステアリングハンドル30を把持して一方向又は他方向に操作すれば、当該ステアリングハンドル30の回転方向に対応して制御弁34の切換位置及び開度が切り換わり、当該制御弁34の切換位置及び開度に応じてステアリングシリンダ35が左又は右に伸縮することによって、前輪7Fの操舵方向を変更することができる。つまり、車体3は、ステアリングハンドル30の手動操舵によって、進行方向を左又は右に変更することができる。
次に、自動操舵について説明する。
図2に示すように、自動操舵を行うに際しては、まず、自動操舵を行う前に走行基準ラインL1を設定する。走行基準ラインL1の設定後に、当該走行基準ラインL1に平行な走行予定ラインL2の設定を行うことによって自動操舵を行うことができる。自動操舵では、測位装置40によって測定された車体位置と走行予定ラインをL2とが一致するように、トラクタ1(車体3)の進行方向の操舵を自動的に行う。
具体的には、自動操舵を行う前にトラクタ1(車体3)を圃場内の所定位置に移動させ(S1)、所定位置にて運転者がトラクタ1に設けられた操舵切換スイッチ52の操作を行うと(S2)、測位装置40によって測定された車体位置が走行基準ラインL1の始点P10に設定される(S3)。また、トラクタ1(車体3)を走行基準ラインL1の始点P10から移動させ(S4)、所定の位置で運転者が操舵切換スイッチ52の操作を行うと(S5)、測位装置40によって測定された車体位置が走行基準ラインL1の終点P11に設定される(S6)。したがって、始点P10と終点P11とを結ぶ直線が走行基準ラインL1として設定される。
走行基準ラインL1の設定後(S6後)、例えば、トラクタ1(車体3)を、走行基準ラインL1を設定した場所とは異なる場所に移動させ(S7)、運転者が操舵切換スイッ
チ52の操作を行うと(S8)、走行基準ラインL1に平行な直線である走行予定ラインL2が設定される(S9)。走行予定ラインL2の設定後、自動操舵が開始され、トラクタ1(車体3)の進行方向が走行予定ラインL2に沿うように変更される。例えば、現在の車体位置が走行予定ラインL2に対して左側にある場合には、前輪7Fが右に操舵され、現在の車体位置が走行予定ラインL2に対して右側にある場合には、前輪7Fが左に操舵される。なお、自動操舵中において、トラクタ1(車体3)の走行速度(車速)は、運転者が手動で当該トラクタ1に設けられたアクセル部材(アクセルペダル、アクセルレバー)の操作量を変更したり、変速装置5の変速段を変更することにより変更することができる。
また、自動操舵の開始後、運転者が任意の箇所で操舵切換スイッチ52の操作を行うと、自動操舵を終了することができる。即ち、走行予定ラインL2の終点は、操舵切換スイッチ52の操作による自動操舵の終了によって設定することができる。つまり、走行予定ラインL2の始点から終点までの長さは、走行基準ラインL1よりも長く設定したり、短く設定することができる。言い換えれば、走行予定ラインL2は、走行基準ラインL1の長さとは関連付けされておらず、走行予定ラインL2によって、走行基準ラインL1の長さよりも長い距離を自動操舵しながら走行させることができる。
図1に示すように、操舵装置11は、自動操舵機構37を有している。自動操舵機構37は、車体3の自動操舵を行う機構であって、測位装置40で検出された車体3の位置(車体位置)に基づいて車体3を自動操舵する。自動操舵機構37は、ステアリングモータ38とギア機構39とを備えている。ステアリングモータ38は、車体位置に基づいて、回転方向、回転速度、回転角度等が制御可能なモータである。ギア機構39は、ステアリングシャフト31に設けられ且つ当該ステアリングシャフト31と供回りするギアと、ステアリングモータ38の回転軸に設けられ且つ当該回転軸と供回りするギアとを含んでいる。ステアリングモータ38の回転軸が回転すると、ギア機構39を介して、ステアリングシャフト31が自動的に回転(回動)し、車体位置が走行予定ラインL2に一致するように、前輪7Fの操舵方向を変更することができる。
図1に示すように、トラクタ1は、表示装置45を備えている。表示装置45は、トラクタ1に関する様々な情報を表示可能な装置であって、少なくともトラクタ1の運転情報を表示可能である。表示装置45は、運転席10の前方に設けられている。
図1に示すように、トラクタ1は、設定スイッチ51を備えている。設定スイッチ51は、少なくとも自動操舵の開始前の設定を行う設定モードに切り換えるスイッチである。設定モードは、自動操舵を開始する前に当該自動操舵に関する様々な設定を行うモードであり、例えば、走行基準ラインL1の始点、終点の設定等を行うモードである。
設定スイッチ51は、ON又はOFFに切換可能であり、ONである場合には設定モードが有効である信号を出力し、OFFである場合には設定モードが無効である信号を出力する。また、設定スイッチ51は、ONである場合には設定モードが有効である信号を表示装置45に出力し、OFFである場合には設定モードが無効である信号を表示装置45に出力する。
トラクタ1は、操舵切換スイッチ52を備えている。操舵切換スイッチ52は、自動操舵の開始又は終了を切り換えるスイッチである。具体的には、操舵切換スイッチ52は、中立位置から上、下、前、後に切換可能であり、設定モードが有効である状態で中立位置から下方に切り換えられた場合には自動操舵の開始を出力し、設定モードが有効である状態で中立位置から上方に切り換えられた場合には自動操舵の終了を出力する。また、操舵切換スイッチ52は、設定モードが有効である状態で中立位置から後に切り換えられた場合には、現在の車体位置を走行基準ラインL1の始点P10に設定することを出力し、操舵切換スイッチ52は、設定モードが有効である状態で中立位置から前に切り換えられた場合には、現在の車体位置を走行基準ラインL1の終点P11に設定することを出力する。即ち、操舵切換スイッチ52は、走行基準ラインL1の開始位置(始点P10)及び終了位置(終点P11)を設定する基準ライン設定スイッチ(指令スイッチ)を兼用している。なお、操舵切換スイッチ52は、自動操舵の開始又は終了を切り換える操舵切換スイッチ52と、基準ライン設定スイッチ(指令スイッチ)とは別体に構成してもよい。
トラクタ1は、補正スイッチ53を備えている。補正スイッチ53は、測位装置40によって測定された車体位置(緯度、経度)を補正するスイッチである。即ち、補正スイッチ53は、衛星信号(測位衛星の位置、送信時刻、補正情報等)と、慣性計測装置42で計測した測定情報(加速度、角速度)とで演算された車体位置(演算車体位置という)を補正するスイッチである。
補正スイッチ53は、押圧可能なプッシュスイッチ又はスライド可能なスライドスイッチで構成されている。以下、補正スイッチ53がプッシュスイッチ、スライドスイッチのそれぞれである場合について説明する。
補正スイッチ53がプッシュスイッチである場合、当該プッシュスイッチの操作回数に基づいて、補正量が設定される。補正量は、補正量=操作回数×1回の操作回数当たりの補正量により決定される。例えば、図3Aに示すように、プッシュスイッチを操作する毎に、補正量が数センチ或いは数十センチずつ増加する。プッシュスイッチの操作回数は、第1制御装置60Aに入力され、当該第1制御装置60Aが操作回数に基づいて補正量を設定(演算)する。
また、補正スイッチ53がスライドスイッチである場合、当該スライドスイッチの操作量(変位量)に基づいて、補正量が設定される。例えば、補正量は、補正量=所定位置からの変位量により決定される。例えば、図3Bに示すように、スライドスイッチの変位量が5mm増加する毎に、補正量が数センチ或いは数十センチずつ増加する。スライドスイッチの操作量(変位量)は、第1制御装置60Aに入力され、当該第1制御装置60Aが変位量に基づいて補正量を設定(演算)する。なお、上述した補正量の増加方法及び増加の割合は、上述した数値に限定されない。
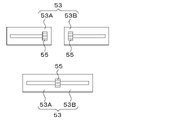
詳しくは、図4A及び図4Bに示すように、補正スイッチ53は、第1補正部53Aと、第2補正部53Bとを有している。第1補正部53Aは、車体3の幅方向における一方側、即ち、左側に対応する車体位置の補正を指令する部分である。第2補正部53Bは、車体3の幅方向における他方側、即ち、右側に対応する車体位置の補正を指令する部分である。
図4Aに示すように、補正スイッチ53がプッシュスイッチである場合、第1補正部53A及び第2補正部53Bは、操作を行う毎に自動的に復帰するON又はOFFのスイッチである。第1補正部53Aを構成するスイッチと第2補正部53Bを構成するスイッチとは一体化されている。なお、第1補正部53Aを構成するスイッチと第2補正部53Bを構成するスイッチとは互いに離間して配置されていてもよい。図3Aに示すように、第1補正部53Aを押圧する毎に、車体3の左側に対応する補正量(左補正量)が増加する。また、第2補正部53Bを押圧する毎に、車体3の右側に対応する補正量(右補正量)が増加する。
図4Bに示すように、補正スイッチ53がスライドスイッチである場合、第1補正部53A及び第2補正部53Bは、長孔の長手方向に沿って左又は右に移動する摘み部55を含んでいる。補正スイッチ53がスライドスイッチである場合、第1補正部53Aと第2補正部53Bとは互いに幅方向に離間して配置されている。図3Bに示すように、摘み部55を予め定められた基準位置から徐々に左側へ変位させると、変位量に応じて左補正量が増加する。また、摘み部55を予め定められた基準位置から徐々に右側へ変位させると、変位量に応じて右補正量が増加する。なお、図4Bに示すように、スライドスイッチである場合、第1補正部53Aと第2補正部53Bとを一体化に形成し、摘み部55の基準位置を中央部に設定し、基準位置から左側に移動した場合に左補正量が設定され、摘み部55を中間位置から右側に移動した場合に右補正量が設定される構成としてもよい。
次に、補正スイッチ53による補正量(左補正量、右補正量)と、走行予定ラインL2と、トラクタ1(車体3)の挙動(走行軌跡)との関係について説明する。
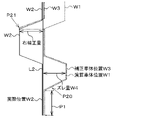
図5Aは、自動操舵中で直進中に演算車体位置W1が右にずれた場合の状態を示している。図5Aに示すように、自動操舵が開始された状態において、実際のトラクタ1(車体3)の位置(実際位置W2)と演算車体位置W1とが一致し、且つ、実際位置W2と走行
予定ラインL2とが一致している場合、トラクタ1は走行予定ラインL2に沿って走行する。即ち、測位装置40の測位に誤差がなく、測位装置40で検出した車体位置(演算車体位置W1)が実際位置W2と同じである区間P1では、トラクタ1は走行予定ラインL2に沿って走行する。なお、測位装置40の測位に誤差がなく補正も行われていない場合は、演算車体位置W1と、補正量で補正した補正後の車体位置(補正車体位置)W3とは同じ値である。補正車体位置W3は、補正車体位置W3=演算車体位置W1-補正量である。
ここで、位置P20の付近において、実際位置W2が走行予定ラインL2に対してズレていないのにも関わらず、様々な影響により、測位装置40の測位に誤差が生じ、測位装置40で検出した車体位置W1が走行予定ラインL2(実際位置W2)に対して右側にズレてしまい、ズレ量W4が維持されているとすると、トラクタ1は、演算車体位置W1と走行予定ラインL2とにズレが生じたと判断し、演算車体位置W1と走行予定ラインL2とのズレ量W4を解消するように、当該トラクタ1を左に操舵する。そうすると、トラクタ1の実際位置W2は左の操舵によって走行予定ラインL2にシフトする。その後、運転者がトラクタ1が走行予定ラインL2からズレていることに気づき、位置P21にて第2補正部53Bを操舵して右補正量を零から増加させたとする。演算車体位置W1に対して右補正量が加えられ、補正後の車体位置(補正車体位置)W3は、実際位置W2と略同じにすることができる。つまり、第2補正部53Bによって右補正量を設定することにより、位置P20の付近において発生したズレ量W4を解消する方向に、測位装置40の車体位置を補正することができる。なお、図5Aの位置P21に示すように、車体位置の補正後、トラクタ1の実際位置W2が走行予定ラインL2から左側に離れている場合は、トラクタ1は右に操舵され、当該トラクタ1の実際位置W2を、走行予定ラインL2に一致させることができる。
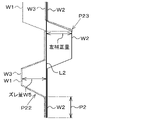
図5Bは、自動操舵中で直進中に演算車体位置W1が左にずれた場合の状態を示している。図5Bに示すように、自動操舵が開始された状態において、実際位置W2と演算車体位置W1とが一致し、且つ、実際位置W2と走行予定ラインL2とが一致している場合、図5Aと同様に、トラクタ1は走行予定ラインL2に沿って走行する。即ち、図5Aと同様に、測位装置40の測位に誤差がない区間P2では、トラクタ1は走行予定ラインL2に沿って走行する。また、図5Aと同様に、演算車体位置W1と補正車体位置W3とは同じ値である。
ここで、位置P22において、様々な影響により、測位装置40の測位に誤差が生じ、測位装置40で検出した車体位置W1が実際位置W2に対して左側にズレてしまい、ズレ量W5が維持されているとすると、トラクタ1は、演算車体位置W1と走行予定ラインL2とのズレ量W5を解消するように、当該トラクタ1を右に操舵する。その後、運転者がトラクタ1が走行予定ラインL2からズレていることに気づき、運転者が位置P23にて第1補正部53Aを操舵して左補正量を零から増加させたとする。そうすると、演算車体位置W1に対して左補正量が加えられ、補正後の車体位置(補正車体位置)W3は、実際位置W2と略同じにすることができる。つまり、第1補正部53Aによって左補正量を設定することにより、位置P22の付近において発生したズレ量W5を解消する方向に、測位装置40の車体位置を補正することができる。なお、図5Bの位置P23に示すように、車体位置の補正後、トラクタ1の実際位置W2が走行予定ラインL2から右側に離れている場合は、トラクタ1は左に操舵され、当該トラクタ1の実際位置W2を、走行予定ラインL2に一致させることができる。
次に、設定スイッチ51、補正スイッチ53について説明する。
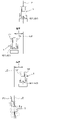
図6に示すように、ステアリングシャフト31の外周は、ステアリングポスト180により覆われている。ステアリングポスト180の外周は、カバー177により覆われている。カバー177は、運転席10の前方に設けられている。カバー177は、パネルカバー178とコラムカバー179とを含んでいる。
パネルカバー178は、表示装置45を支持している。パネルカバー178の上板部178aには、表示装置45を支持する支持部178eが設けられている。支持部178eは、ステアリングシャフト31の前方且つステアリングハンドル30の下方において表示装置45を支持している。また、上板部178aは、設定スイッチ51及び補正スイッチ53が取り付けられた取付面178fを有している。取付面178fは、支持部178eの後方であって且つステアリングハンドル30の下方に設けられている。支持部178eと取付面178fとは連続しており、支持部178eは上板部178aの前部に位置し、取付面178fは上板部178aの後部に位置している。設定スイッチ51、補正スイッチ53は、取付面178fに取り付けられている。これにより、設定スイッチ51、補正スイッチ53は、ステアリングシャフト31の周囲に配置されている。
パネルカバー178の左板部178bからはシャトルレバー181が突出している。シャトルレバー181は、車体3の走行方向を切り換える操作を行う部材である。より詳しく説明すると、シャトルレバー181を前方に操作(揺動)することにより、前後進切換部13が走行装置7へ前進動力を出力する状態となり、車体3の走行方向が前進方向に切り換えられる。また、シャトルレバー181を後方に操作(揺動)することにより、前後進切換部13が走行装置7へ後進動力を出力する状態となり、車体3の走行方向が後進方向に切り換えられる。シャトルレバー181が中立位置にあるときには、走行装置7へ動力が出力されない。
コラムカバー179は、ステアリングハンドル30の下方に配置されており、ステアリングシャフト31の上部の周囲を覆っている。コラムカバー179は、略四角筒状に形成されており、パネルカバー178の取付面178fから上方に突出している。つまり、取付面178fは、コラムカバー179の周囲に設けられている。そのため、取付面178fに取り付けられた設定スイッチ51、補正スイッチ53は、コラムカバー179の周囲に配置されている。
次に、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53のそれぞれの配置について詳しく説明する。図6に示すように、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53は、ステアリングシャフト31の周囲に配置されている。
設定スイッチ51は、ステアリングシャフト31の一側方(左方)に配置されている。操舵切換スイッチ52は、ステアリングシャフト31の一側方(左方)に配置されている。本実施形態の場合、操舵切換スイッチ52は、揺動可能なレバーから構成されている。操舵切換スイッチ52は、ステアリングシャフト31側に設けられた基端部を支点として揺動可能である。操舵切換スイッチ52の基端部は、コラムカバー179の内部に設けられている。操舵切換スイッチ52は、コラムカバー179の一側方(左方)に突出している。
補正スイッチ53は、ステアリングシャフト31の他側方(右方)に配置されている。より詳しくは、補正スイッチ53は、ステアリングシャフト31の右方且つ後方(斜め右後方)に配置されている。補正スイッチ53は、コラムカバー179との位置関係では、コラムカバー179の右方且つ後方(斜め右後方)に配置されている。補正スイッチ53は、パネルカバー178の取付面178fとの位置関係では、取付面178fの右後部に配置されている。補正スイッチ53が傾斜した取付面178fの後部に配置されていることによって、補正スイッチ53とステアリングハンドル30との距離を長く確保することができる。これにより、意図しない補正スイッチ53の操作やステアリングハンドル30の操舵をより確実に防止できる。
上述の通り、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53は、ステアリングシャフト31の周囲に配置されている。言い換えれば、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53は、ステアリングシャフト31の周囲に集約して存在している。そのため、運転者は、各スイッチの位置を一目瞭然で把握することができる。加えて、運転者は、運転席10に着座したままの状態で姿勢を変えずに各スイッチを操作することができる。そのため、操作性が良好となり、且つ誤操作を防止することができる。また、各スイッチから配策されるハーネス(配線)を短くすることができる。
尚、上述したスイッチの配置について、左と右とを入れ替えて配置してもよい。つまり、一側方が左方であって他側方が右方であってもよいし、一側方が右方であって他側方が左方であってもよい。具体的には、例えば、設定スイッチ51及び操舵切換スイッチ52をステアリングシャフト31の右方に配置し、補正スイッチ53をステアリングシャフト31の左方に配置してもよい。
図1に示すように、トラクタ1は、複数の制御装置60を備えている。複数の制御装置60は、トラクタ1における走行系の制御、作業系の制御、車体位置の演算等を行う装置である。複数の制御装置60は、第1制御装置60A、第2制御装置60B及び第3制御装置60Cである。
第1制御装置60Aは、受信装置41が受信した衛星信号(受信情報)と、慣性計測装置42が測定した測定情報(加速度、角速度等)を受信し、受信情報及び測定情報に基づいて車体位置を求める。例えば、第1制御装置60Aは、補正スイッチ53による補正量が零である場合、即ち、補正スイッチ53による車体位置の補正が指令されていない場合、受信情報と測定情報とで演算された演算車体位置W1に対して補正を行わず、演算車体位置W1を自動操舵時に用いる車体位置に決定する。一方、第1制御装置60Aは、補正スイッチ53による車体位置の補正が指令されている場合、補正スイッチ53の操作回数及び補正スイッチ53の操作量(変位量)のいずれかに基づいて車体位置の補正量を設定し、演算車体位置W1を補正量で補正した補正車体位置W3を自動操舵時に用いる車体位置に決定する。
第1制御装置60Aは、車体位置(演算車体位置W1、補正車体位置W3)及び走行予定ラインL2に基づいて制御信号を設定し、制御信号を第2制御装置60Bに出力する。第2制御装置60Bは、自動操舵制御部200を有している。自動操舵制御部200は、第2制御装置60Bに設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。自動操舵制御部200は、第1制御装置60Aから出力された制御信号に基づいて車体3が走行予定ラインL2に沿って走行するように自動操舵機構37のステアリングモータ38を制御する。
図7に示すように、車体位置と走行予定ラインL2との偏差が閾値未満である場合、自動操舵制御部200は、ステアリングモータ38の回転軸の回転角を維持する。車体位置と走行予定ラインL2との偏差が閾値以上であって、トラクタ1が走行予定ラインL2に対して左側に位置している場合は、自動操舵制御部200は、トラクタ1の操舵方向が右方向となるようにステアリングモータ38の回転軸を回転する。車体位置と走行予定ラインL2との偏差が閾値以上であって、トラクタ1が走行予定ラインL2に対して右側に位置している場合は、自動操舵制御部200は、トラクタ1の操舵方向が左方向となるようにステアリングモータ38の回転軸を回転する。なお、上述した実施形態では、車体位置と走行予定ラインL2との偏差に基づいて操舵装置11の操舵角を変更していたが、走行予定ラインL2の方位とトラクタ1(車体3)の進行方向(走行方向)の方位(車体方位)F1とが異なる場合、即ち、走行予定ラインL2に対する車体方位F1の角度θgが閾値以上である場合、自動操舵制御部200は、角度θgが零(車体方位F1が走行予定ラインL2の方位に一致)するように操舵角を設定してもよい。また、自動操舵制御部200は、偏差(位置偏差)に基づいて求めた操舵角と、方位(方位偏差)に基づいて求めた操舵角とに基づいて、自動操舵における最終の操舵角を設定してもよい。上述した実施形態における自動操舵における操舵角の設定は一例であり、限定されない。
以上のように、制御装置60によって、トラクタ1(車体3)を自動操舵することができる。
第3制御装置60Cは、トラクタ1に関する様々な制御を行う。第3制御装置60Cは、手動昇降制御、オートアップ制御等を行うことができる。手動昇降制御では、第3制御装置60Cに接続された昇降スイッチ101の操作に基づいて昇降装置8を昇降する制御である。具体的には、昇降スイッチ101は、運転席10の周囲に設けられていて、3位置切換スイッチである。昇降スイッチ101を中立位置から一方に切り換えると、昇降装置8(リフトアーム8a)を上昇させる上昇信号が第3制御装置60Cに入力される。また、昇降スイッチ101を中立位置から他方に切り換えると、昇降装置8(リフトアーム8a)を下降させる下降信号が第3制御装置60に入力される。第3制御装置60Cは、上昇信号を取得すると制御弁29に制御信号を出力することで昇降装置8を上昇させ、下降信号を取得すると制御弁29に制御信号を出力することで昇降装置8を下降させる。つまり、第3制御装置60は、昇降スイッチ101の手動操作に応じて昇降装置8を昇降させる手動昇降制御をすることができる。
また、オートアップ制御では、トラクタ1(車体3)が後進した場合に、自動的に昇降装置8を作動させることで作業装置2を上昇する制御である。具体的には、制御装置60C等の制御装置60には、後進を検出する後進検出装置102が接続されている。後進検出装置102は、前車軸21Fの回転を検出するセンサ、後車軸21Rの回転を検出するセンサ、シャトルレバー181の切換位置を検出するセンサ等である。即ち、後進検出装置102は、前車軸21Fの回転方向及び後車軸21Rの回転方向が後進に対応する回転方向である場合、シャトルレバー181の切換位置が後進側である場合、トラクタ1(車体3)の後進を検出する。第3制御装置60Cは、後進検出装置102がトラクタ1(車体3)の後進を検出すると、オートアップ装置の制御弁29に制御信号を出力することで昇降装置8を自動的に上昇させるオートアップ制御を行う。なお、上述した後進検出装置102は一例であり限定されない。
以上のように、制御装置60Cによって、トラクタ1に関する制御、例えば、手動昇降制御、オートアップ制御を行うことができる。
さて、トラクタ1は、後進しながら自動操舵を行うことができる。図9は、トラクタ1における前進の自動操舵と、後進の自動操舵とを示した図である。図9に示すように、圃場H1内で自動操舵を行うに際して、操舵切換スイッチ52によって自動操舵の開始を操作する毎に、複数の走行予定ラインL2の直線部分SLn(n=1、2、3・・・)が設定される。例えば、開始位置ST1にて操舵切換スイッチ52を操作し、自動操舵の開始が指令されると、1本目の直線部分SL1が設定される。そして、自動操舵制御部200によって、直線部分SL1に沿ってトラクタ1を前進させながら自動操舵を行うことができる。また、終了位置EN1にて操舵切換スイッチ52を操作し、自動操舵の終了が指令されると、直線部分SL1に沿う自動操舵を終了することができる。トラクタ1に装着した作業装置で作業を行う際は、1本目の直線部分SL1における前進の自動操舵が終了後、トラクタ1を旋回させずに、後進の自動操舵を行う。
例えば、開始位置ST2にて操舵切換スイッチ52を操作し、自動操舵の開始が指令されると、2本目の直線部分SL2が設定される。そして、制御装置60(第2制御装置60B、第3制御装置60C)によって、直線部分SL2に沿ってトラクタ1を後進させながら自動操舵を行う。具体的には、操舵切換スイッチ52によって自動操舵の開始が行われた際に、直線部分SL2に沿ってトラクタ1が後進するように、第2制御装置60B及び第3制御装置60Cが自動操舵の制御を行う。具体的には、第3制御装置60Cは、操舵切換スイッチ52によって自動操舵の開始が指令された場合、後進検出装置102による検出情報によって車体3が後進しているか否かを判断し、車体3が後進している場合は、オートアップ制御を無効に設定し、後進検出装置102が後進を検出した場合であっても、オートアップ制御を行わない。また、第2制御装置60Bの自動操舵制御部200は、トラクタ1が直線部分SL2に沿って後進しながら走行するように、自動操舵を実行する。また、終了位置EN2にて操舵切換スイッチ52を操作し、自動操舵の終了が指令されると、第3制御装置60は、オートアップ制御を無効から有効に設定し、オートアップ制御を行えるようにする。
なお、第3制御装置60Cは、直線部分SL2に沿ってトラクタ1を後進させながら自動操舵を行っている状況下において、昇降スイッチ101を操作すると、当該昇降スイッチ101の操作に応じて昇降装置8を上昇させたり下降させる。つまり、第3制御装置60Cは、後進の自動操舵の場合は、昇降スイッチ101の操作による昇降を実行する。
さて、図1に示すように、トラクタ1は、報知装置80を備えている。報知装置80は、自動操舵の終了の位置にトラクタ1(車体3)が近づいた場合に、報知を行う装置である。報知装置80は、スピーカ、ランプ等であって、運転席10の近傍に設けられている。具体的には、報知装置80は、自動操舵の終了をしたときの車体3の位置(自動操舵の終了位置)に対して車体3の幅方向にシフトしたシフト位置に、車体3が近づいたことを、スピーカによる音声出力、警告音、ランプの点灯、点滅等により報知する。
以下、報知装置80による報知と、自動操舵の終了位置、シフト位置の関係について詳しく説明する。
自動操舵の終了位置をENnとした場合、直線部分SLnが偶数本目(n=2、4、6・・・)における自動操舵の終了位置ENnは、圃場において一方側に並ぶ(図9では紙面上側)。
一方側の終了位置ENnにおいて、自動操舵の終了は、1本飛ばしになるため、シフト位置は、現時点の終了位置ENnから見てn+2番目の終了位置ENn+2となる(n=2、4、6・・・)。例えば、2回目の終了位置EN2を基準にした場合、シフト位置は、終了位置EN4に対応することになる。つまり、報知装置80は、2回目の終了位置EN2が操舵切換スイッチ52によって決定した場合、4回目の終了位置EN4に対応するシフト位置に、トラクタ1が近づいた場合に報知をする。例えば、トラクタ1が直進部SL4を走行し、当該トラクタ1が、4回目の終了位置EN4(シフト位置)に近づいた場合に報知装置80は報知する。より詳しくは、2回目の終了位置EN2にて操舵切換スイッチ52によって自動操舵の指令が行われた場合、第1制御装置60Aは、測位装置40で検出した検出位置(車体位置)を保持し、保持した位置(終了位置EN2)に、車体3の幅方向のシフト量(シフト距離)AD1を加算することで、終了位置に対応するシフト位置(終了対応位置)に設定する。報知装置80は、手動操舵時において、測位装置40で検出した車体位置と終了対応位置との距離差が所定以下になった場合に報知を実行する。
また、直線部分SLnが奇数本目(n=1、3、5・・・)における自動操舵の終了位置ENnは、圃場において他方側に並ぶ(図9では紙面下側)。他方側の終了位置ENnにおいても終了対応位置は、現時点の終了位置ENnから見てn+2番目の終了位置ENn+2となる(n=1、3、5・・・)。例えば、1回目の終了位置EN1を基準にした場合、終了対応位置は、終了位置EN3に対応することにる。
この場合、報知装置80は、1回目の終了位置EN1が操舵切換スイッチ52によって決定した場合、3回目の終了位置EN3に対応する終了対応位置に、トラクタ1が近づいた場合に報知をする。より詳しくは、1回目の終了位置EN1にて操舵切換スイッチ52によって自動操舵の指令が行われた場合、第1制御装置60Aは、測位装置40で検出した検出位置(車体位置)を保持し、保持した位置(終了位置EN1)に、車体3の幅方向のシフト量(シフト距離)AD1を加算することで終了対応位置を求める。報知装置80は、手動操舵時において、測位装置40で検出した車体位置と終了対応位置との距離差が所定以下になった場合に報知を実行する。
なお、報知装置80による報知の間隔は、トラクタ1と終了対応位置との距離差に応じて変更することが好ましい。例えば、報知装置80が音を出力する場合、近づいていることを示す音の出力間隔を、距離差が短い場合には短くし、距離差が長い場合には長くする。
さて、トラクタ1は、記憶装置81を備えている。記憶装置81は、操舵切換スイッチ52によって自動操舵の開始又は終了に切り換えた場合のトラクタ1の位置(開始位置STn、終了位置ENn)、即ち、測位装置40で検出した検出位置(車体位置)を記憶する装置である。記憶装置81は、制御装置60又は表示装置45に内蔵されていてもよいし、別体であってもよい。
表示装置45は、記憶装置81に記憶した開始位置STn、終了位置ENnを、トラクタ1の作業場、即ち、圃場を示す圃場マップMP1上に表示する。図10に示すように、表示装置45に対して所定の操作を行うと、当該表示装置45は、圃場画面M1を表示する。圃場画面M1では、トラクタ1が作業を行っている現在の圃場H1を表示すると共に、測位装置40で検出した検出位置SP1(走行ラインL10)を表示する。また、表示装置45は、記憶装置81を参照し、現在の圃場H1における開始位置STn、終了位置ENnを表示する。例えば、表示装置45は、圃場画面M1において、開始位置STnを示すシンボル83aと、終了位置ENnを示すシンボル83bとを圃場マップMP1に重ねて表示する。
なお、上述した実施形態では、自動操舵の開始位置STnに対応する開始対応位置と、自動操舵の終了位置ENnに対応する終了対応位置とに近づいた場合に報知を行っていたが、開始対応位置及び終了対応位置のいずれかに近づいた場合に報知してもよい。
作業車両1は、車体3と、車体3の操舵を行うステアリングハンドル30と、車体3の位置を検出可能な測位装置40と、測位装置40によって検出された車体3の位置を走行基準ラインL1に設定する指令スイッチと、ステアリングハンドル30による手動操舵とは別の自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチ52と、操舵切換スイッチ52によって自動操舵の開始が行われた際に、走行基準ラインL1に対応する走行予定ラインL2に沿って車体3が後進するように、後進の自動操舵の指令を行う制御装置60と、を備えている。これによれば、自動操舵時に走行予定ラインL2に沿って車体3を簡単に後進させることができる。即ち、後進時における自動操舵を簡単に行うことができる。
作業車両1は、車体3の後部に設けられる作業装置2と、作業装置2を昇降可能な昇降装置8と、車体3が後進したことを作動条件として昇降装置8を上昇させるオートアップ装置と、を備え、制御装置60は、手動操舵で且つ車体3が後進した場合はオートアップ装置による昇降装置8の上昇を行い、後進の自動操舵の場合はオートアップ装置による昇降装置8の上昇を行わない。これによれば、手動操舵を行いながら車体3を後進させた場合は昇降装置8を自動的に上昇させることができる一方で、自動操舵を行いながら車体を後進させた場合は昇降装置8の昇降を停止して作業装置2によって作業を行うことができる。
作業車両1は、昇降装置8による昇降を操作する昇降スイッチ101を備え、制御装置60は、後進の自動操舵の場合は昇降スイッチ101の操作による昇降を実行する。これによれば、自動操舵を行いながら車体を後進させた場合において、昇降スイッチ101を操作したときに作業装置2を昇降させることができる。
制御装置60は、車体3が後進を開始してから所定距離を進んだ場合に、操舵切換スイッチ52を自動操舵の終了に切り換えた際の車体3の終了位置を保持する。これによれば、自動操舵を終了したときの終了位置を把握することができ、後進しながらの作業の終了位置(自動操舵の終了位置)を揃えることができる。
作業車両1は、車体3の終了位置に対して車体3の幅方向にシフトしたシフト位置に、車体3が近づいたことを報知する報知装置80を備えている。これによれば、車体3を後進している状況下において、少なくとも1つ前の自動操舵の終了位置を報知装置80によって把握することができる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。