JP2022123787A - 障害物検出装置、方法及びプログラム - Google Patents
障害物検出装置、方法及びプログラム Download PDFInfo
- Publication number
- JP2022123787A JP2022123787A JP2021021323A JP2021021323A JP2022123787A JP 2022123787 A JP2022123787 A JP 2022123787A JP 2021021323 A JP2021021323 A JP 2021021323A JP 2021021323 A JP2021021323 A JP 2021021323A JP 2022123787 A JP2022123787 A JP 2022123787A
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- door
- ultrasonic sensor
- distance
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 122
- 238000000034 method Methods 0.000 title claims description 32
- 238000012545 processing Methods 0.000 claims abstract description 102
- 238000003384 imaging method Methods 0.000 claims abstract description 13
- 238000005259 measurement Methods 0.000 claims description 12
- 238000012937 correction Methods 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 44
- 230000008569 process Effects 0.000 description 20
- 230000005540 biological transmission Effects 0.000 description 13
- 102100027867 FH2 domain-containing protein 1 Human genes 0.000 description 9
- 101001060553 Homo sapiens FH2 domain-containing protein 1 Proteins 0.000 description 9
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 5
- 235000021189 garnishes Nutrition 0.000 description 4
- 238000003702 image correction Methods 0.000 description 4
- 101001012154 Homo sapiens Inverted formin-2 Proteins 0.000 description 3
- 102100030075 Inverted formin-2 Human genes 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
- E05F15/43—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/08—Systems for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/86—Combinations of sonar systems with lidar systems; Combinations of sonar systems with systems not using wave reflection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/87—Combinations of sonar systems
- G01S15/876—Combination of several spaced transmitters or receivers of known location for determining the position of a transponder or a reflector
- G01S15/878—Combination of several spaced transmitters or receivers of known location for determining the position of a transponder or a reflector wherein transceivers are operated, either sequentially or simultaneously, both in bi-static and in mono-static mode, e.g. cross-echo mode
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/255—Detecting or recognising potential candidate objects based on visual cues, e.g. shapes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/71—Circuitry for evaluating the brightness variation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/76—Circuitry for compensating brightness variation in the scene by influencing the image signals
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
- E05F15/43—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound
- E05F2015/432—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with acoustical sensors
- E05F2015/433—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with acoustical sensors using reflection from the obstruction
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
- E05F15/43—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound
- E05F2015/434—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with optical sensors
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
- E05F2015/483—Detection using safety edges for detection during opening
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
- E05F2015/763—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects using acoustical sensors
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
- E05F2015/767—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects using cameras
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME RELATING TO HINGES OR OTHER SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS AND DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION, CHECKS FOR WINGS AND WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05Y2400/00—Electronic control; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/44—Sensors therefore
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME RELATING TO HINGES OR OTHER SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS AND DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION, CHECKS FOR WINGS AND WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05Y2400/00—Electronic control; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/52—Safety arrangements
- E05Y2400/53—Wing impact prevention or reduction
- E05Y2400/54—Obstruction or resistance detection
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME RELATING TO HINGES OR OTHER SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS AND DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION, CHECKS FOR WINGS AND WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/50—Application of doors, windows, wings or fittings thereof for vehicles
- E05Y2900/53—Application of doors, windows, wings or fittings thereof for vehicles characterised by the type of wing
- E05Y2900/531—Doors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30261—Obstacle
Abstract
【課題】障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりする。【解決手段】実施形態の障害物検出装置は、超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサの出力に基づいて、障害物までの距離及び障害物の形状のうち、少なくとも距離を検出する超音波センサ信号処理部と、車両のドアの開時の軌跡範囲及び超音波センサの検出範囲を含む領域を撮像する車両のカメラの出力に基づいて、障害物までの距離及び障害物の形状を検出するカメラ画像処理部と、超音波センサ信号処理部の検出結果及びカメラ画像処理部の検出結果に基づいて、ドアの開動作制御を行うコントローラと、を備える。【選択図】図1
Description
本発明の実施形態は、障害物検出装置、方法及びプログラムに関する。
従来、カメラや超音波センサ等を用いて車両のドアの周辺の障害物を検出し、検出した障害物に接触しないようにドアを制御(例えば、ドアの開度を制御)する技術が知られている。
例えば、単眼カメラを用いてドアの制御を行う装置においては、単眼カメラが移動しない状態においては、障害物までの正確な距離を把握することができないため、障害物に衝突する直前でドアが停止するような制御を行うことはできなかった。
また、超音波センサだけで複雑な形状の障害物を検出しようとしてもドアに最初に接触する虞がある部分を検出することができなかったり、検出誤差が大きくなることでドアが障害物と衝突してしまったりする虞があった。
また、超音波センサだけで複雑な形状の障害物を検出しようとしてもドアに最初に接触する虞がある部分を検出することができなかったり、検出誤差が大きくなることでドアが障害物と衝突してしまったりする虞があった。
本発明は、上記に鑑みてなされたものであり、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避することが可能な障害物検出装置、方法及びプログラムを提供することにある。
実施形態の障害物検出装置は、超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する超音波センサ信号処理部と、
前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出するカメラ画像処理部と、前記超音波センサ信号処理部の検出結果及び前記カメラ画像処理部の検出結果に基づいて、前記ドアの開動作制御を行うコントローラと、を備える。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出するカメラ画像処理部と、前記超音波センサ信号処理部の検出結果及び前記カメラ画像処理部の検出結果に基づいて、前記ドアの開動作制御を行うコントローラと、を備える。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
また、前記超音波センサ信号処理部は、一つの前記ドアに対し、複数配置された前記超音波センサの出力に基づいて前記障害物までの距離及び前記障害物の形状を検出するようにしてもよい。
この構成によれば、より検出精度及び信頼性の向上が図れる。
この構成によれば、より検出精度及び信頼性の向上が図れる。
また、前記コントローラは、前記超音波センサ信号処理部及び前記カメラ画像処理部の検出結果において、前記障害物までの距離が同一とみなせ、かつ、前記障害物の形状も同種であると判断した場合に前記ドアの開制御を許可するようにしてもよい。
上記構成によれば、より確実に開制御を行える。
上記構成によれば、より確実に開制御を行える。
また、前記コントローラは、前記超音波センサ信号処理部及び前記カメラ画像処理部の検出結果において、前記障害物までの距離が同一とみなせる場合に、前記障害物の手前まで前記ドアの開制御を許可するようにしてもよい。
上記構成によれば、より計測精度の高い超音波センサの検出結果に基づいてドア開制御を行える。
上記構成によれば、より計測精度の高い超音波センサの検出結果に基づいてドア開制御を行える。
また、前記コントローラは、前記車両の外部において、前記ドアの開動作を行わせる信号が入力され、前記カメラ画像処理部の検出結果に基づいて前記軌跡範囲の内部に人が検出された場合に、前記人が前記軌跡範囲から前記人が移動した場合に、前記ドアの開制御を許可するようにしてもよい。
上記構成によれば、車両に乗り込もうとしている人が障害物として扱われて、ドアの開制御が正常に行えなくなるのを抑制できる。
前記超音波センサは、前記ドアに一つ設けられており、前記超音波センサ信号処理部は、前記ドアの開動作時に得られる複数の前記障害物までの距離に基づいて、前記障害物までの距離を検出するようにしてもよい。
上記構成によれば、装置構成を簡略化しつつ、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
上記構成によれば、車両に乗り込もうとしている人が障害物として扱われて、ドアの開制御が正常に行えなくなるのを抑制できる。
前記超音波センサは、前記ドアに一つ設けられており、前記超音波センサ信号処理部は、前記ドアの開動作時に得られる複数の前記障害物までの距離に基づいて、前記障害物までの距離を検出するようにしてもよい。
上記構成によれば、装置構成を簡略化しつつ、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
前記カメラ画像処理部は、前記カメラの撮像領域の明るさに基づいて、前記カメラの出力した撮像画像の補正を行い、前記コントローラは、補正後の前記撮像画像に基づいて、前記撮像画像に含まれる前記障害物の存在確率を取得し、取得した前記存在確率に基づいて物体認識を行うようにしてもよい。
上記構成によれば、太陽等の外光の影響を抑制して、障害物を高精度で把握し、ひいては、障害物までの距離も高精度で把握することができ、ドア開制御を行える。
上記構成によれば、太陽等の外光の影響を抑制して、障害物を高精度で把握し、ひいては、障害物までの距離も高精度で把握することができ、ドア開制御を行える。
また前記コントローラは、前記カメラの撮像場所に基づいて、前記障害物の存在確率を取得し、取得した前記存在確率と測距センサの測距結果に基づいて、前記物体認識を行うようにしてもよい。
上記構成によれば、撮像場所に基づいて太陽等の外光の位置を特定し、外光の影響を抑制して、障害物を高精度で把握し、ひいては、障害物までの距離も高精度で把握することができ、ドア開制御を行える。
上記構成によれば、撮像場所に基づいて太陽等の外光の位置を特定し、外光の影響を抑制して、障害物を高精度で把握し、ひいては、障害物までの距離も高精度で把握することができ、ドア開制御を行える。
また、前記カメラ画像処理部は、前記車両の向き及び対象物の陰の影響を除去すべく、前記補正として、前記撮像画像の明るさ補正を行うので、画像の白飛びあるいは黒つぶれなどによる影響を抑制して、障害物までの距離を高精度で把握して、ドア開制御を行える。
実施形態の方法は、超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサからの出力及び前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力が入力される障害物検出装置で実行される方法であって、前記超音波センサからの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する第1過程と、前記カメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出する第2過程と、前記第1過程及び前記第2過程の検出結果に基づいて、前記ドアの開動作制御を行う第3過程と、を備える。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
実施形態のプログラムは、所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサからの出力及び前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力が入力される障害物検出装置をコンピュータにより制御するためのプログラムであって、前記コンピュータを、前記超音波センサからの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する第1手段と、前記カメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出する第2手段と、前記第1手段及び前記第2手段の検出結果に基づいて、前記ドアの開動作制御を行う第3手段と、して機能させる。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
上記構成によれば、障害物に衝突する直前でドアを停止させたり、様々な状況において障害物への衝突を回避したりすることができる。
以下、本発明の例示的な実施形態が開示される。以下に示される実施形態の構成、ならびに当該構成によってもたらされる作用、結果、および効果は、一例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能であるとともに、基本的な構成に基づく種々の効果や、派生的な効果のうち、少なくとも1つを得ることが可能である。
[1]第1実施形態
図1は、第1実施形態にかかる障害物検出装置の概要構成ブロック図である。
障害物検出装置10は、複数のカメラ11-1~11-nと、複数の超音波センサ群12-1~12-nと、コントローラ13と、ドア開スイッチ(車内)14Aと、ドア開スイッチ(車外)14Bと、ドア駆動部15と、を備えている。
複数のカメラ11-1~11-nは、それぞれ対応するドアを撮像可能な位置に配置されている。さらにカメラ11-1~11-nの撮像範囲は、対応するドアの閉状態からフル開状態までの撮像が可能な範囲とされている。
上記構成において、コントローラ13は、いわゆるマイクロコンピュータとして構成されており、予め記憶した制御プログラムに基づいて障害物検出装置10を制御することとなる。
図1は、第1実施形態にかかる障害物検出装置の概要構成ブロック図である。
障害物検出装置10は、複数のカメラ11-1~11-nと、複数の超音波センサ群12-1~12-nと、コントローラ13と、ドア開スイッチ(車内)14Aと、ドア開スイッチ(車外)14Bと、ドア駆動部15と、を備えている。
複数のカメラ11-1~11-nは、それぞれ対応するドアを撮像可能な位置に配置されている。さらにカメラ11-1~11-nの撮像範囲は、対応するドアの閉状態からフル開状態までの撮像が可能な範囲とされている。
上記構成において、コントローラ13は、いわゆるマイクロコンピュータとして構成されており、予め記憶した制御プログラムに基づいて障害物検出装置10を制御することとなる。
各超音波センサ群12-1~12-nは、それぞれ車両の前後方向に配置された第1超音波センサSN1及び第2超音波センサSN2を備えている。
コントローラ13は、障害物検出装置10全体を制御している。コントローラ13は、カメラ画像処理部21と、超音波センサ信号処理部22と、総合制御部23と、ドア制御部24を備えている。
上記構成において、カメラ画像処理部21は、複数のカメラ11-1~11-nの出力したカメラ画像を処理して、処理結果を総合制御部23に出力する。この場合において、カメラ画像処理部21は、障害物の有無判定、形状推定(物体検出)及び許容ドア開度を算出する。
超音波センサ信号処理部22は、複数の超音波センサ群12-1~12-nをそれぞれ構成している第1超音波センサSN1及び第2超音波センサSN2の出力信号を処理して総合制御部23に出力する。この場合において、超音波センサ信号処理部22は、障害物の有無判定、形状推定及び許容ドア開度を算出する。
総合制御部23は、コントローラ13全体を制御している。そして、ドア開スイッチ(車内)14Aあるいはドア開スイッチ(車外)14Bが操作された場合に、カメラ画像処理部21及び超音波センサ信号処理部22の出力に基づいて、ドア制御部24を介してドアの駆動制御を行う。
ドア制御部24は、総合制御部23の制御下でドア駆動部15を制御してドアの駆動制御(ドア開度の制御等)を行う。
ドア開スイッチ(車内)14Aは、車室内に配置されて乗員がドアを開ける場合に操作を行う。
ドア開スイッチ(車外)14Bは、車外に配置されており、ドアを開けて乗員が乗り込もうとする際等に操作を行う。
ドア開スイッチ(車外)14Bは、車外に配置されており、ドアを開けて乗員が乗り込もうとする際等に操作を行う。
ドア開スイッチ(車内)14A及びドア開スイッチ(車外)14Bは、メカニカルスイッチ、静電スイッチ、リモートコントローラスイッチとして構成されている。またカメラや電波センサによりユーザ(乗員)の位置や行動を検出してそれをトリガとして動作するようにソフトウェア的に構成することも可能である。
ドア駆動部15は、ドア制御部24の制御下でドアの解錠/施錠制御および開閉制御を行う。
ドア駆動部15は、ドア制御部24の制御下でドアの解錠/施錠制御および開閉制御を行う。
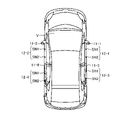
図2は、第1実施形態にかかる障害物検出装置車両の平面図である。
図3は、第1実施形態にかかる障害物検出装置車両の右側面図である。
図2においては、理解の容易のため、4台のカメラ11-1~11-4及びこれらのカメラ11-1~11-4のそれぞれに対応する超音波センサ群12-1~12-4を配置した場合を例として説明を行う。
図3は、第1実施形態にかかる障害物検出装置車両の右側面図である。
図2においては、理解の容易のため、4台のカメラ11-1~11-4及びこれらのカメラ11-1~11-4のそれぞれに対応する超音波センサ群12-1~12-4を配置した場合を例として説明を行う。
また、図2においては、上方向が車両Vの前方向であり、下方向が車両Vの後ろ方向であり、右方向が車両Vの右方向であり、左方向が車両Vの左方向である。図3においては、右方向が車両Vの前方向であり、左方向が車両Vの後ろ方向である。
図2あるいは図3に示すように、車両Vの右サイドミラーに右前ドアを撮像するカメラ11-1が配置されている。車両Vの左サイドミラーには左前ドアを撮像するカメラ11-2が配置されている。また車両Vの右中央ピラーの上部には、右後ドアを撮像するカメラ11-3が配置されている。車両Vの左中央ピラーの上部には左後ドアを撮像するカメラ11-4が配置されている。
車両Vの右前ドアの例えば下部のガーニッシュには、超音波センサ群12-1が配置されている。車両Vの左前ドアの例えば下部のガーニッシュには、超音波センサ群12-2が配置されている。車両Vの右後ドアの例えば下部のガーニッシュには、超音波センサ群12-3が配置されている。車両Vの左後ドアの例えば下部のガーニッシュには、超音波センサ群12-4が配置されている。
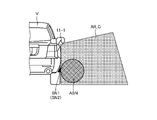
図4は、車両の後方から見た場合のカメラの検出範囲と超音波センサの検出範囲を説明する図である。
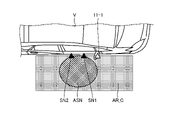
図5は、車両の上方から見た場合のカメラの検出範囲と超音波センサの検出範囲を説明する図である。
図5は、車両の上方から見た場合のカメラの検出範囲と超音波センサの検出範囲を説明する図である。
図4及び図5においては、理解の容易のため、カメラ11-1及び超音波センサ群12-1を構成している第1超音波センサSN1及び第2超音波センサSN2のみを示している。
図4及び図5に示すように、カメラ11-1の検出範囲ARCは、超音波センサ群12-1を構成している第1超音波センサSN1及び第2超音波センサSN2の検出範囲ASNを包含するように構成されている。
図4及び図5に示すように、カメラ11-1の検出範囲ARCは、超音波センサ群12-1を構成している第1超音波センサSN1及び第2超音波センサSN2の検出範囲ASNを包含するように構成されている。
ここで、超音波センサの検出方法について説明する。
超音波センサ群12-1を構成している第1超音波センサSN1及び第2超音波センサSN2は、それぞれ送信及び受信を交互に行うようにされている。
超音波センサ群12-1を構成している第1超音波センサSN1及び第2超音波センサSN2は、それぞれ送信及び受信を交互に行うようにされている。
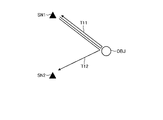
図6は、第1超音波センサの送信時の説明図である。
第1超音波センサSN1が超音波を送信した場合には、障害物OBJにより超音波が反射されて、第1超音波センサSN1は、超音波T11を受信し、第2超音波センサSN2T12を受信する。
第1超音波センサSN1が超音波を送信した場合には、障害物OBJにより超音波が反射されて、第1超音波センサSN1は、超音波T11を受信し、第2超音波センサSN2T12を受信する。
このとき、第1超音波センサSN1の送信タイミングと、第1超音波センサSN1の超音波T11の受信タイミングと、の差が第1超音波センサSN1と障害物OBJとの距離(の2倍)に相当する。
また、第1超音波センサSN1の送信タイミングと、第2超音波センサSN2の超音波T12の受信タイミングと、の差が第1超音波センサSN1と障害物OBJを経由した第2超音波センサSN2との距離に相当する。
図7は、第2超音波センサの送信時の説明図である。
第2超音波センサSN2が超音波を送信した場合には、障害物OBJにより超音波が反射されて、第1超音波センサSN1は、超音波T21を受信し、第2超音波センサSN2T22を受信する。
第2超音波センサSN2が超音波を送信した場合には、障害物OBJにより超音波が反射されて、第1超音波センサSN1は、超音波T21を受信し、第2超音波センサSN2T22を受信する。
このとき、第2超音波センサSN2の送信タイミングと、第1超音波センサSN1の超音波T21の受信タイミングと、の差が第2超音波センサSN2と障害物OBJを経由した第1超音波センサSN1との距離に相当する。
また、第2超音波センサSN2の送信タイミングと、第1超音波センサSN1の超音波T21の受信タイミングと、の差が第2超音波センサSN2と障害物OBJとの距離(の2倍)に相当する。
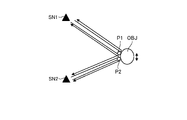
図8は、障害物の位置検出の説明図である。
図6及び図7の検出結果から、図8における距離a及び距離bは算出することが可能である。また第1超音波センサSN1と第2超音波センサSN2との間の距離cは、予めわかっているので、図8に示すように距離x及び距離zを3辺測量の原理により算出することができる。
図6及び図7の検出結果から、図8における距離a及び距離bは算出することが可能である。また第1超音波センサSN1と第2超音波センサSN2との間の距離cは、予めわかっているので、図8に示すように距離x及び距離zを3辺測量の原理により算出することができる。
次に超音波センサによる障害物の形状推定について説明する。
図9は、障害物がポール(柱)状であるポール系の障害物の場合の説明図である。
図9に示すように、第1超音波センサSN1の送信時に算出した障害物の座標P1と、第2超音波センサSN2の送信時に算出した障害物の座標P2と、が近い場合には、超音波センサ信号処理部22は、ポール系の障害物であると判断する。
図9は、障害物がポール(柱)状であるポール系の障害物の場合の説明図である。
図9に示すように、第1超音波センサSN1の送信時に算出した障害物の座標P1と、第2超音波センサSN2の送信時に算出した障害物の座標P2と、が近い場合には、超音波センサ信号処理部22は、ポール系の障害物であると判断する。
図10は、障害物が壁状である壁系の障害物の場合の説明図である。
図10に示すように、第1超音波センサSN1の送信時に算出した障害物の座標P1と、第2超音波センサSN2の送信時に算出した障害物の座標P2と、が離れている場合には、超音波センサ信号処理部22は、壁系の障害物であると判断する。
図10に示すように、第1超音波センサSN1の送信時に算出した障害物の座標P1と、第2超音波センサSN2の送信時に算出した障害物の座標P2と、が離れている場合には、超音波センサ信号処理部22は、壁系の障害物であると判断する。
次に障害物がポール系である場合のドア開示にドアが衝突可能性のある障害物の検出方法について説明する。
以下の説明においては、ポール系の障害物として二つの障害物OBJ1及び障害物OBJ2が検出された場合を例とする。
以下の説明においては、ポール系の障害物として二つの障害物OBJ1及び障害物OBJ2が検出された場合を例とする。
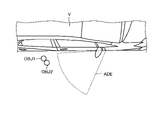
図11は、衝突可能性のある障害物が検出されない場合の説明図である。
超音波センサ信号処理部22は、二つの障害物OBJ1及び障害物OBJ2が検出された場合に、図11に示すように、車両Vのドア開時のドア軌跡エリアADE内に二つの障害物OBJ1及び障害物OBJ2のいずれも含まれていないと判断した場合には、障害物なしと判断する。
超音波センサ信号処理部22は、二つの障害物OBJ1及び障害物OBJ2が検出された場合に、図11に示すように、車両Vのドア開時のドア軌跡エリアADE内に二つの障害物OBJ1及び障害物OBJ2のいずれも含まれていないと判断した場合には、障害物なしと判断する。
図12は、衝突可能性のある障害物が検出された場合の説明図である。
超音波センサ信号処理部22は、二つの障害物OBJ1及び障害物OBJ2が検出された場合に、図11に示すように、車両Vのドア開時のドア軌跡エリアADE内に二つの障害物OBJ1及び障害物OBJ2のうち、少なくともいずれか(図12の例では、障害物OBJ2)が含まれていると判断した場合には、障害物ありと判断する。
超音波センサ信号処理部22は、二つの障害物OBJ1及び障害物OBJ2が検出された場合に、図11に示すように、車両Vのドア開時のドア軌跡エリアADE内に二つの障害物OBJ1及び障害物OBJ2のうち、少なくともいずれか(図12の例では、障害物OBJ2)が含まれていると判断した場合には、障害物ありと判断する。
次に超音波センサによる障害物検出時のドア制御について説明する。
図13は、ドア軌跡エリア内に検出した障害物が複数含まれている場合のドア制御の説明図である。
超音波センサ信号処理部22は、ドア軌跡エリア内に検出した障害物が複数含まれている場合には、ドアを全閉状態から開けていった場合に最初に衝突する可能性がある障害物(図13の場合には障害物OBJ1)に対して衝突しない最大のドア開度を許容ドア開度ANG_ALとして算出する。
これにより総合制御部23は、ドア制御部24を介してドア駆動部15を制御し、図13に示す許容ドア開度ANG_ALまでドアを開くこととなる。
図13は、ドア軌跡エリア内に検出した障害物が複数含まれている場合のドア制御の説明図である。
超音波センサ信号処理部22は、ドア軌跡エリア内に検出した障害物が複数含まれている場合には、ドアを全閉状態から開けていった場合に最初に衝突する可能性がある障害物(図13の場合には障害物OBJ1)に対して衝突しない最大のドア開度を許容ドア開度ANG_ALとして算出する。
これにより総合制御部23は、ドア制御部24を介してドア駆動部15を制御し、図13に示す許容ドア開度ANG_ALまでドアを開くこととなる。
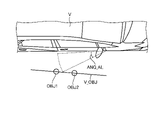
図14は、複数の障害物を検出した場合のドア制御の説明図である。
図14の例は、複数の障害物を検出したが、ドア軌跡エリア内に含まれない障害物も含まれている場合のものである。
このような場合には、超音波センサ信号処理部22は、検出した障害物を判別用直線V_OBJで結び、ドアを全閉状態から開けていった場合にこの判別用直線V_OBJに対して衝突しない最大のドア開度を許容ドア開度ANG_ALとして算出する。
これにより総合制御部23は、ドア制御部24を介してドア駆動部15を制御し、図15に示す許容ドア開度ANG_ALまでドアを開くこととなる。
図14の例は、複数の障害物を検出したが、ドア軌跡エリア内に含まれない障害物も含まれている場合のものである。
このような場合には、超音波センサ信号処理部22は、検出した障害物を判別用直線V_OBJで結び、ドアを全閉状態から開けていった場合にこの判別用直線V_OBJに対して衝突しない最大のドア開度を許容ドア開度ANG_ALとして算出する。
これにより総合制御部23は、ドア制御部24を介してドア駆動部15を制御し、図15に示す許容ドア開度ANG_ALまでドアを開くこととなる。
次にカメラ画像処理部21における処理の概要について説明する。
カメラ画像処理部21においては、カメラ11-1~11-nにより撮像した撮像画像に基づいて画像認識処理等により物体検出を行い、障害物の種類(ポール系、壁系、人等)及び障害物の位置(撮像画像中で最も車両Vに近い点の位置)を検出する。
カメラ画像処理部21においては、カメラ11-1~11-nにより撮像した撮像画像に基づいて画像認識処理等により物体検出を行い、障害物の種類(ポール系、壁系、人等)及び障害物の位置(撮像画像中で最も車両Vに近い点の位置)を検出する。
この場合において、障害物の検出処理は、障害物そのものを物体検出する方法の他、障害物と、地面と、の配置関係に基づいて障害物を検出するようにしてもよい。
つづいて、カメラ画像処理部21は、障害物の種類と位置からドア軌跡内の障害物の有無を判断する。
そしてドア軌跡内に障害物ありと判断した場合には、ドアを全閉状態から開けていった場合に当該障害物に衝突しない最大のドア開度を許容ドア開度として算出する。
つづいて、カメラ画像処理部21は、障害物の種類と位置からドア軌跡内の障害物の有無を判断する。
そしてドア軌跡内に障害物ありと判断した場合には、ドアを全閉状態から開けていった場合に当該障害物に衝突しない最大のドア開度を許容ドア開度として算出する。
次に第1実施形態の動作を説明する。
図15は、第1実施形態の動作フローチャートである。
まず、総合制御部23は、ドア開スイッチのオン状態を検出すると(ステップS11)、ドア開スイッチ(車内)14Aがオン状態であるか否かを判断する(ステップS12)。
図15は、第1実施形態の動作フローチャートである。
まず、総合制御部23は、ドア開スイッチのオン状態を検出すると(ステップS11)、ドア開スイッチ(車内)14Aがオン状態であるか否かを判断する(ステップS12)。
ステップS12の判断において、ドア開スイッチ(車内)14Aがオン状態である場合には(ステップS12;Yes)、総合制御部23は、カメラ画像処理部21の出力結果に基づいて、ドア軌跡内に障害物があるか否かを判断する(ステップS13)。
ステップS13の判断において、ドア軌跡内に障害物がある場合には(ステップS13;Yes)、総合制御部23は、カメラ画像処理部21の出力結果に対応する形状判定結果が、超音波センサ(図中、ソナーと記載)SN1,SN2において、精度良く検出できる形状(ポール系あるいは壁系の形状)であるか否かを判断する(ステップS14)。
ステップS14の判断において、超音波センサSN1,SN2において、精度良く検出できる形状ではない場合には(ステップS14;No)、総合制御部23は、処理をステップS20に移行する。
ステップS14の判断において、超音波センサSN1,SN2において、精度良く検出できる形状である場合には(ステップS14;Yes)、総合制御部23は、超音波センサ信号処理部22の出力結果に対応する障害物までの検出距離と、カメラ画像処理部21の出力結果に対応する障害物までの検出距離と、がほぼ等しい値(同一とみなせる値)であるか否かを判断する(ステップS15)。
ステップS15の判断において、検出距離がほぼ等しい状態ではない場合には(ステップS15;No)、総合制御部23は、処理をステップS20に移行する。
ステップS15の判断において、検出距離がほぼ等しい状態である場合には(ステップS15;Yes)、総合制御部23は、開作動許可をドア制御部24に通知し、ドア制御部24を介してドア駆動部15を制御して超音波センサ信号処理部22により検出した許容ドア開度内でドアを制御して処理を終了する(ステップS16)。
ステップS15の判断において、検出距離がほぼ等しい状態である場合には(ステップS15;Yes)、総合制御部23は、開作動許可をドア制御部24に通知し、ドア制御部24を介してドア駆動部15を制御して超音波センサ信号処理部22により検出した許容ドア開度内でドアを制御して処理を終了する(ステップS16)。
ここで、カメラ画像処理部21の検出結果、超音波センサ信号処理部22の検出結果及び総合制御部23の判定結果の関係について説明する。
図16は、障害物がポール(ポール系)である場合の説明図である。
図16(A)に示すように、障害物がポール(ポール系)PLである場合には、カメラ画像処理部21の検出結果は、障害物あり、障害物の形状はポール系とされる。
また、超音波センサ信号処理部22の検出結果も同様に障害物あり、障害物の形状はポール系とされる。
この結果、総合制御部23の判定結果は車両Vのドアの開作動を許可し、超音波センサの許容ドア開度内でドアを制御することとなる。
これにより、図16(B)に示すように、ドアが障害物に衝突する直前までのドアの開作動が可能となる。
図16(A)に示すように、障害物がポール(ポール系)PLである場合には、カメラ画像処理部21の検出結果は、障害物あり、障害物の形状はポール系とされる。
また、超音波センサ信号処理部22の検出結果も同様に障害物あり、障害物の形状はポール系とされる。
この結果、総合制御部23の判定結果は車両Vのドアの開作動を許可し、超音波センサの許容ドア開度内でドアを制御することとなる。
これにより、図16(B)に示すように、ドアが障害物に衝突する直前までのドアの開作動が可能となる。
図17は、障害物がガードレール(複雑な形状の障害物)である場合の説明図である。
図17に示すように、障害物がガードレールGRである場合には、カメラ画像処理部21の検出結果は、障害物あり、障害物の形状はガードレールとされる。
これに対し、超音波センサ信号処理部22の検出結果は、第1超音波センサSN1及び第2超音波センサSN2が水平に配置されているので、ガードレールGRの設置状況によっては、障害物なしと判断されたり、ガードレールGRの形状によっては、検出誤差が大きくなったりする。また障害物ありと検出できた場合には、障害物の形状は壁系とされる。
図17に示すように、障害物がガードレールGRである場合には、カメラ画像処理部21の検出結果は、障害物あり、障害物の形状はガードレールとされる。
これに対し、超音波センサ信号処理部22の検出結果は、第1超音波センサSN1及び第2超音波センサSN2が水平に配置されているので、ガードレールGRの設置状況によっては、障害物なしと判断されたり、ガードレールGRの形状によっては、検出誤差が大きくなったりする。また障害物ありと検出できた場合には、障害物の形状は壁系とされる。
これらの結果、総合制御部23は、超音波センサ信号処理部22の検出結果は信頼できないと判断され、ドアの開作動を制限し、例えば、車両のサイドミラーの幅の範囲内(ポップアップ位置)でドアの開度を制限する開作動制限状態でドアを制御することとなる。
これにより、図16(B)に示すように、ドアが障害物に折衝する直前までのドアの開作動が可能となる。
これにより、図16(B)に示すように、ドアが障害物に折衝する直前までのドアの開作動が可能となる。
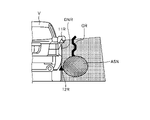
図18は、ドアの外部に乗車しようとする人が立っている場合の説明図である。
ステップS12の判断において、ドア開スイッチ(車内)14Aがオフ状態である場合には、ドア開スイッチ(車外)14Bがオン状態であるので、総合制御部23は、ユーザの立ち位置がドア開時の軌跡範囲外であるか否かを判断する(ステップS18)。
ステップS12の判断において、ドア開スイッチ(車内)14Aがオフ状態である場合には、ドア開スイッチ(車外)14Bがオン状態であるので、総合制御部23は、ユーザの立ち位置がドア開時の軌跡範囲外であるか否かを判断する(ステップS18)。
図18に示すように、人HMが車外においてドアを開ける場合には、カメラ画像処理部21の検出結果は、障害物あり、障害物は人であるとされる。
また、超音波センサ信号処理部22の検出結果は、障害物あり、障害物の形状は、ポール系あるいは壁系とされる。
また、超音波センサ信号処理部22の検出結果は、障害物あり、障害物の形状は、ポール系あるいは壁系とされる。
これらの結果、総合制御部23の判定結果は、当該人HMがドア開時の軌跡範囲外に移動したことを検出した後に、再びカメラ画像処理部21及び超音波センサ信号処理部22の検出結果に基づいてドアの開作動制御を行う。
すなわち、ステップS18の判断において、ユーザである人HMの立ち位置がドア開時の軌跡範囲外である場合には(ステップS18;Yes)、総合制御部23は、処理をステップS13に移行し、上述した手順に従い、カメラ画像処理部21及び超音波センサ信号処理部22の検出結果に基づいてドアの開作動制御を行うこととなる。
ステップS18の判断において、ユーザである人HMの立ち位置がドア開時の軌跡範囲内である場合には(ステップS18;No)、ドア開スイッチ(車外)14Bがオン状態になってから所定時間が経過したか否かを判断する(ステップS19)。
ステップS19の判断において、未だドア開スイッチ(車外)14Bがオン状態になってから所定時間が経過していない場合には(ステップS19;No)、総合制御部23は、処理をステップS18に移行して待機状態となる。
ステップS19の判断において、ドア開スイッチ(車外)14Bがオン状態になってから所定時間が経過した場合には(ステップS;Yes)、総合制御部23は、超音波センサ信号処理部22の検出結果の信頼性が低いとして、ドアの開作動制限を行ってドアの開動作制御を行い処理を終了する(ステップS20)。
またステップS13の判断において、ドア軌跡内に障害物がない場合には(ステップS13;No)、総合制御部23は、障害物なしとしてドアの開作動が可であるとして、ドア制御部24を介してドア駆動部15を制御して、ドア開動作を行って処理を終了する(ステップS17)。
以上の説明のように、本第1実施形態によれば、ドアを開動作させるドア開スイッチ14A、14Bから開動作をさせる信号が入力されたときにドア開時のドア軌跡内の領域において、カメラ画像処理部21及び超音波センサ信号処理部22の検出結果に対応する障害物の有無及び障害物の形状の推定結果が一致した場合にドアの開制御を許可するので、超音波センサSN1、SN2で検出が困難である形状の障害物であってもドアが障害物に衝突するのを回避することができる。
また、障害物までの距離をカメラ画像処理部21及び超音波センサ信号処理部22で検出し、検出結果がほぼ等しい場合(検出結果が同一であると見なせる場合)には、障害物の手前までの開動作を許可するので、超音波センサSN1、SN2で検出が困難である形状の障害物であってもドアが障害物に衝突するのを回避することができる。
さらに車外に設けられたドア開スイッチ14Bからドアを開動作させる信号が入力された場合には、ドア開時のドア軌跡内において人を検出した場合にドアの開操作を制限し、当該人が所定時間以内にドア軌跡外に移動した場合には、通常通りドアの開制御を許可するので、車両Vに乗り込もうとする人が障害物として判断されて、ドアの開作動が無用に制限されるのを防止することができる。
[2]第2実施形態
上記第1実施形態においては、超音波センサ群12-1~12-nとして、第1超音波センサSN1及び第2超音波センサSN2の二つの超音波センサを用いる構成としていたが、本第2実施形態は、超音波センサ群12-1~12-nに代えてそれぞれ対応するドアに一つの超音波センサSNを設けた場合の実施形態である。
この場合においても、障害物検出装置の構成は、第1実施形態と同様であるので、その説明を適宜援用するものとする。
上記第1実施形態においては、超音波センサ群12-1~12-nとして、第1超音波センサSN1及び第2超音波センサSN2の二つの超音波センサを用いる構成としていたが、本第2実施形態は、超音波センサ群12-1~12-nに代えてそれぞれ対応するドアに一つの超音波センサSNを設けた場合の実施形態である。
この場合においても、障害物検出装置の構成は、第1実施形態と同様であるので、その説明を適宜援用するものとする。
図19は、第2実施形態にかかる障害物検出装置車両の右側面図である。
図19に示すように、ドアの下部には、それぞれ超音波センサSNが儲けられている。
図20は、超音波センサの検出状態の説明図である。
図19に示すように、ドアの下部には、それぞれ超音波センサSNが儲けられている。
図20は、超音波センサの検出状態の説明図である。
図19に示したように超音波センサSNを一つだけ設けた場合には、図20に示すように、障害物OBJまでの距離は算出することができるが、図20に破線の曲線OVで示すように障害物OBJが円周上のいずれかに存在するということしか判断することはできない。
すなわち、本第2実施形態の超音波センサ信号処理部22では、障害物がドア全閉状態でドア開時のドア軌跡範囲内か否かを判断したり、障害物の形状を判別したりすることはできない。
すなわち、本第2実施形態の超音波センサ信号処理部22では、障害物がドア全閉状態でドア開時のドア軌跡範囲内か否かを判断したり、障害物の形状を判別したりすることはできない。
図21は、検出距離比較の説明図である。
このため、本第2実施形態においては、これらについてカメラ画像処理部21の検出結果との比較は行わず、図21に示すように、カメラ画像処理部21の検出結果と、超音波センサ信号処理部22の距離検出結果と、を比較する。
このため、本第2実施形態においては、これらについてカメラ画像処理部21の検出結果との比較は行わず、図21に示すように、カメラ画像処理部21の検出結果と、超音波センサ信号処理部22の距離検出結果と、を比較する。
図22は、ドア開時の超音波センサによるポール系の障害物位置検出の説明図である。
図22に示すように、ドア開時には、車両Vは停車しており、ドアの開状態に応じて超音波センサSNと障害物OBJとの距離は、徐々に変化するので、総合制御部23は、ドアの開状態に応じて障害物OBJまでの距離をあらわす曲線OV1及び曲線OV2との交点に障害物OBJが位置するものとしてポール系の障害物OBJの位置を特定して、ドア開制御を行う。
図22に示すように、ドア開時には、車両Vは停車しており、ドアの開状態に応じて超音波センサSNと障害物OBJとの距離は、徐々に変化するので、総合制御部23は、ドアの開状態に応じて障害物OBJまでの距離をあらわす曲線OV1及び曲線OV2との交点に障害物OBJが位置するものとしてポール系の障害物OBJの位置を特定して、ドア開制御を行う。
図23は、ドア開時の超音波センサによる壁系の障害物位置検出の説明図である。
図23に示すように、ドア開時には、車両Vは停車しており、ドアの開状態に応じて超音波センサSNと障害物OBJとの距離は、ほぼ一定のまま推移する。
したがって、総合制御部23は、ドアの開状態に応じて障害物OBJまでの距離をあらわす曲線OV1及び曲線OV2の接線の延在方向に沿って障害物OBJが位置するものとして壁系の障害物OBJの位置を特定して、ドア開制御を行う。
以上の説明のように、本第2実施形態によれば、障害物までの距離をカメラ画像処理部21及び超音波センサ信号処理部22で検出し、検出結果がほぼ等しい場合(検出結果が同一であると見なせる場合)には、障害物の手前までの開動作を許可するので、超音波センサSN1、SN2で検出が困難である形状の障害物であってもドアが障害物に衝突するのを回避することができる。
図23に示すように、ドア開時には、車両Vは停車しており、ドアの開状態に応じて超音波センサSNと障害物OBJとの距離は、ほぼ一定のまま推移する。
したがって、総合制御部23は、ドアの開状態に応じて障害物OBJまでの距離をあらわす曲線OV1及び曲線OV2の接線の延在方向に沿って障害物OBJが位置するものとして壁系の障害物OBJの位置を特定して、ドア開制御を行う。
以上の説明のように、本第2実施形態によれば、障害物までの距離をカメラ画像処理部21及び超音波センサ信号処理部22で検出し、検出結果がほぼ等しい場合(検出結果が同一であると見なせる場合)には、障害物の手前までの開動作を許可するので、超音波センサSN1、SN2で検出が困難である形状の障害物であってもドアが障害物に衝突するのを回避することができる。
[3]第3実施形態
図24は、第1実施形態にかかる障害物検出装置の概要構成ブロック図である。
図24において、図1の第1実施形態と同様の部分には、同一の符号を付し、その詳細な説明を援用するものとする。
図24は、第1実施形態にかかる障害物検出装置の概要構成ブロック図である。
図24において、図1の第1実施形態と同様の部分には、同一の符号を付し、その詳細な説明を援用するものとする。
図24の障害物検出装置10Aが、図1の障害物検出装置10と異なる点は、入力された車両情報及びドア制御部24が出力したドア開度情報INF5を記憶する記憶部25を備え、カメラ画像処理部21において、検出感度及び検出精度を向上するための画像処理を行う点である。
上記構成において、車両情報としては、自車位置情報INF1、マップ情報INF2、時間情報INF3及び環境情報INF4が含まれている。
自車位置情報INF1は、例えば、緯度・経度情報等のGPS情報であり、自車両の位置を表す情報である。
自車位置情報INF1は、例えば、緯度・経度情報等のGPS情報であり、自車両の位置を表す情報である。
マップ情報INF2は、山の南斜面等の太陽との位置関係を把握するための地形情報を取得するための情報である。
時間情報INF3は、現在時刻情報を含むものであり、車両の位置情報と連携して太陽との位置関係を把握するための情報である。
時間情報INF3は、現在時刻情報を含むものであり、車両の位置情報と連携して太陽との位置関係を把握するための情報である。
環境情報INF4は、例えば、複数のカメラ11-1~11-n毎の照度情報を含んでおり、照度センサ等から入力される。
ドア開度情報INF5は、車両の向きに対して、車両のドアに設けられているカメラの向きを補正するために用いられる。
ドア開度情報INF5は、車両の向きに対して、車両のドアに設けられているカメラの向きを補正するために用いられる。
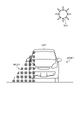
図25は、第3実施形態の原理説明図である。
ここで、図25を参照して、本第3実施形態の原理について説明する。
カメラ11-1~11-nは、明るさの影響を受けやすく、機械学習による物体認識においても、明るさの影響は受けやすいことが課題となっている。例えば、影によって物体との境界線を正しく認識できない等の課題があった。
ここで、図25を参照して、本第3実施形態の原理について説明する。
カメラ11-1~11-nは、明るさの影響を受けやすく、機械学習による物体認識においても、明るさの影響は受けやすいことが課題となっている。例えば、影によって物体との境界線を正しく認識できない等の課題があった。
そこで、本第3実施形態対においては、車両位置や車両進行方向、時間から光源(太陽、街路灯(蛍光灯)等。特に太陽の影響が大きい)と、車両の位置との関係を把握することにより、カメラ11-1~11-nの明るさを調節することにより、より物体認識をしやすくようにしている。
より具体的には、図25に示すように、例えば、車両CARが太陽SUNからの太陽光に照射されているとする。
この場合において、車両の太陽側である領域AR_BRにおいては、太陽光が照射された状態であるため、当該側に設けられたカメラの入射光量が増加する。
この場合において、車両の太陽側である領域AR_BRにおいては、太陽光が照射された状態であるため、当該側に設けられたカメラの入射光量が増加する。
これに対して、太陽SUNに対して車両CARの背後側である領域AR_SHにおいては、太陽光の光量が低下した状態であるため、当該側に設けられたカメラの入射光量が減少する。
このため、本第3実施形態においては、カメラ11-1~11-nの光源(太陽等)に対する位置関係及び周囲環境の明るさ(照度)に基づいて、撮像画像の明るさを調節することにより、いずれのカメラ11-1~11-nにおいても、より物体認識をしやすくようにしている。
次に第3実施形態の動作を説明する。
図26は、第3実施形態の処理フローチャートである。
ドア開閉作動スイッチのオン状態を検出すると(ステップS31)、照度が所定の閾値以上、すなわち、太陽光等の照射状態であるか否かを判断する(ステップS32)。
ステップS32の判断において、照度が閾値以上である場合には(ステップS32;Yes)、カメラの撮像画像に基づいてドア開時のドア軌跡内に障害物が有るか否かを判断する(ステップS33)。
図26は、第3実施形態の処理フローチャートである。
ドア開閉作動スイッチのオン状態を検出すると(ステップS31)、照度が所定の閾値以上、すなわち、太陽光等の照射状態であるか否かを判断する(ステップS32)。
ステップS32の判断において、照度が閾値以上である場合には(ステップS32;Yes)、カメラの撮像画像に基づいてドア開時のドア軌跡内に障害物が有るか否かを判断する(ステップS33)。
ステップS33の判断において、ドア軌跡内に障害物がないと判断された場合には(ステップS33;なし)、超音波センサの出力信号に基づいてドア開時のドア軌跡内に障害物があるか否かを判断する(ステップS34)。
ステップS34の判断において、ドア軌跡内に障害物がないと判断された場合には(ステップS34;なし)、まずドアをポップアップ位置まで開き、その後、ドアを全開として(ステップS35)、処理を終了する。
ステップS34の判断において、ドア軌跡内に障害物がないと判断された場合には(ステップS34;なし)、まずドアをポップアップ位置まで開き、その後、ドアを全開として(ステップS35)、処理を終了する。
ステップS34の判断において、ドア軌跡内に障害物があると判断された場合には(ステップS34;あり)、まずドアをポップアップ位置まで開き、複数の撮像画像に基づいて当該対象物までの距離を再計算する(ステップS36)。
より詳細には、ドア閉時のカメラの撮像画像、ドア開後、ドアをポップアップ位置に向けて徐々に開きつつカメラで撮像を行い、得られた一又は複数の撮像画像に基づいて、ステレオカメラの原理で障害物までの距離(カメラ測距距離)を算出する(ステップS36)。
より詳細には、ドア閉時のカメラの撮像画像、ドア開後、ドアをポップアップ位置に向けて徐々に開きつつカメラで撮像を行い、得られた一又は複数の撮像画像に基づいて、ステレオカメラの原理で障害物までの距離(カメラ測距距離)を算出する(ステップS36)。
ここで、複数のカメラの撮像画像に基づいて当該対象物までの距離を再計算する処理についてより詳細に説明する。
図27は、距離再計算処理の処理フローチャートである。
再計算処理においては、カメラ11-1~11-nの光源に対する位置関係に基づいて、明るさを調節することにより、いずれのカメラ11-1~11-nにおいても、より物体認識をしやすくようにするために、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び車高情報を取得する(ステップS51)。
続いて、カメラ画像処理部21は、ステップS51で得られた情報に基づいて、カメラ位置の補正を行う(ステップS52)。
これにより総合制御部23は、カメラ画像処理部21により出力された撮像画像及び補正されたカメラ位置に基づいて、対象物である障害物までの測距処理を行う(ステップS53)。
図27は、距離再計算処理の処理フローチャートである。
再計算処理においては、カメラ11-1~11-nの光源に対する位置関係に基づいて、明るさを調節することにより、いずれのカメラ11-1~11-nにおいても、より物体認識をしやすくようにするために、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び車高情報を取得する(ステップS51)。
続いて、カメラ画像処理部21は、ステップS51で得られた情報に基づいて、カメラ位置の補正を行う(ステップS52)。
これにより総合制御部23は、カメラ画像処理部21により出力された撮像画像及び補正されたカメラ位置に基づいて、対象物である障害物までの測距処理を行う(ステップS53)。
そして、ステップS36において得られた障害物までの距離(カメラ測距距離)から安全性の確保から予め設定した一定値を差し引いた位置を最大ドア開度位置として、障害物の手前までドアを開いてドアを停止させて処理を終了する(ステップS37)。
一方、ステップS33の判断において、ドア軌跡内に障害物があると判断された場合には(ステップS33;あり)、超音波センサの出力信号に基づいてドア開時のドア軌跡内に障害物があるか否かを判断する(ステップS38)。
ステップS38の判断においてドア軌跡内に障害物があると判断された場合には(ステップS38;あり)、カメラの撮像画像に基づいて障害物の形状推定結果が、ポール、壁等の単純な形状を有する単純障害物であるか否かを判断する(ステップS39)。
ステップS38の判断においてドア軌跡内に障害物があると判断された場合には(ステップS38;あり)、カメラの撮像画像に基づいて障害物の形状推定結果が、ポール、壁等の単純な形状を有する単純障害物であるか否かを判断する(ステップS39)。
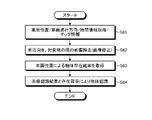
図28は、画像認識の処理フローチャートである。
そして、ステップS39の判断においては、さらにカメラ11-1~11-nの光源に対する位置関係に基づいて、明るさを調節することにより、いずれのカメラ11-1~11-nにおいても、より物体認識をしやすくようにするために、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び時間情報INF3(=光源である太陽位置情報及び昼間/夜間の情報に相当)を取得する(ステップS61)。
そして、ステップS39の判断においては、さらにカメラ11-1~11-nの光源に対する位置関係に基づいて、明るさを調節することにより、いずれのカメラ11-1~11-nにおいても、より物体認識をしやすくようにするために、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び時間情報INF3(=光源である太陽位置情報及び昼間/夜間の情報に相当)を取得する(ステップS61)。
続いて、カメラ画像処理部21は、ステップS61で得られた情報に基づいて、車両の向き、障害物等の対象物の陰の影響を除去する画像修正(画像補正)を行う(ステップS62)。
総合制御部23は、車両位置とマップ情報から予め設定した物体の存在確率を取得する(ステップS63)。
総合制御部23は、車両位置とマップ情報から予め設定した物体の存在確率を取得する(ステップS63)。
そして、総合制御部23は、ステップS62で得られた光源からの光を考慮した画像で画像認識を行い、ステップS63で取得した物体の存在確率を組み合わせ、物体認識を行う(ステップS64)。
また過去に車両を止めた位置であった場合には過去の物体認識結果も使用してもよい。
また過去に車両を止めた位置であった場合には過去の物体認識結果も使用してもよい。
ステップS61~ステップS64の処理によれば、時間情報、車両進行情報を活用して太陽などの光源の影響を取り去り、物体を正しく認識しやすくすることができる。
また、車両位置情報あるいはマップ情報を活用し、車両の現在位置(車両が今どこにいるか)によって、物体の存在確率テーブルを参照することにより、物体認識における誤認識を回避することができる。
また、車両位置情報あるいはマップ情報を活用し、車両の現在位置(車両が今どこにいるか)によって、物体の存在確率テーブルを参照することにより、物体認識における誤認識を回避することができる。
ステップS39の判断において、カメラの撮像画像に基づく障害物の形状推定結果が単純障害物である場合には(ステップS39;単純障害物)、超音波センサによる測距結果は信頼性があるので、超音波センサの出力信号に基づいて障害物までの距離を測定しながらドア開制御を行い、処理を終了する(ステップS40)。
ステップS39の判断において、カメラの撮像画像に基づく障害物の形状推定結果が単純障害物ではない場合には(ステップS39;単純障害物以外)、超音波センサによる測距結果は信頼性が低いので、ドアをポップアップ位置まで開き、再びカメラにより対象物である当該対象物までの距離をカメラの撮像に基づいて対象物である障害物までの距離を再計算する(ステップS41)。
この場合においても、ステップS36の場合と同様に、図27に示したように、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び昼間/夜間の情報に相当)及び車高情報を取得し(ステップS51)、カメラ位置の補正を行う(ステップS52)。これらの結果、総合制御部23は、カメラ画像処理部21により出力された撮像画像及び補正されたカメラ位置に基づいて、対象物である障害物までの測距処理を行う(ステップS53)。
そして、ステップS41において得られた障害物までの距離(カメラ測距距離)から安全性の確保から予め設定した一定値を差し引いた位置を最大ドア開度位置として、障害物の手前までドアを開いてドアを停止させて処理を終了する(ステップS42)。
一方、ステップS38の判断において、ドア軌跡内に障害物がないと判断された場合には(ステップS38;なし)、カメラの撮像画像に基づいて障害物の形状推定結果が、ポール、壁等の単純な形状を有する単純障害物であるか否かを判断する(ステップS43)。
この場合においても、図28に示した上記ステップS61~ステップS64の処理を行うようにしてもよい。
この場合においても、図28に示した上記ステップS61~ステップS64の処理を行うようにしてもよい。
ステップS43の判断において、カメラの撮像画像に基づく障害物の形状推定結果が単純障害物ではない場合には(ステップS39;単純障害物以外)、処理を後述するステップS46に移行する。
ステップS43の判断において、カメラの撮像画像に基づく障害物の形状推定結果が単純障害物である場合には(ステップS39;単純障害物)、ドアをポップアップ位置まで開き、この状態で、超音波センサの検出範囲内に対象物である障害物が入ったか否かを判断する(ステップS44)。
ステップS44の判断において、超音波センサの検出範囲内に対象物である障害物が入った場合には(ステップS44;検知範囲内)、超音波センサによる測距結果は信頼性があるので、超音波センサの出力信号に基づいて障害物までの距離を測定しながらドア開制御を行い、処理を終了する(ステップS45)。
ステップS44の判断において、超音波センサの検出範囲内に対象物である障害物が入っていない場合には(ステップS44;検知範囲外)、まずドアをポップアップ位置まで開き、複数のカメラの撮像画像に基づいて当該対象物までの距離を再計算する(ステップS46)。
ステップS46においては、超音波センサによる測距結果は信頼性が低いので、ドアをポップアップ位置まで開き、再びカメラにより対象物である当該対象物までの距離をカメラの撮像に基づいて対象物である障害物までの距離を再計算している。
ここで、複数のカメラの撮像画像に基づいて当該対象物までの距離を再計算する処理についてより詳細に説明する。
ここで、複数のカメラの撮像画像に基づいて当該対象物までの距離を再計算する処理についてより詳細に説明する。
この場合にステップS46おいても、ステップS36の場合と同様に、図27に示したように、車両情報である自車位置情報INF1(=車両位置に相当)、車両位置情報INF1の履歴(=車両進行方向情報に相当)及び昼間/夜間の情報に相当)及び車高情報を取得し(ステップS51)、カメラ位置の補正を行う(ステップS52)。
またステップS52における補正はステップS33でドア軌跡内判定を行う際の補正にも使用してもよい。
またステップS52における補正はステップS33でドア軌跡内判定を行う際の補正にも使用してもよい。
これらの結果、総合制御部23は、カメラ画像処理部21により出力された撮像画像及び補正されたカメラ位置に基づいて、対象物である障害物までの測距処理を行う(ステップS53)。
この場合においても、図28に示した上記ステップS61~ステップS64の処理を行うようにしてもよい。
この場合においても、図28に示した上記ステップS61~ステップS64の処理を行うようにしてもよい。
そして、ステップS53を経て、ステップS46で算出した障害物までの距離(カメラ測距距離)から、安全性確保のため予め設定した一定値を差し引いた位置を最大ドア開度位置とし、障害物の手前までドアを開いた後にドアを停止させて処理を終了する(ステップS47)。
一方、ステップS32の判断において、照度が閾値未満である場合には(ステップS32;No)、総合制御部23は、画像修正(例えば、明るさ補正等)により、物体認識/障害物判別が可能か否かを可能であるか否かを判断する(ステップS48)。
ステップS48の判断において、画像修正(例えば、明るさ補正等)により、物体認識/障害物判別が可能である場合には(ステップS48;可能)、処理をステップS33に移行し、上述したのと同様の手順でドア開制御を行う。
ステップS48の判断において、画像修正を行っても物体認識/障害物判別が不可能である場合(画面が暗すぎていわゆる黒つぶれ状態となっている場合等)には、障害物、あるいは、障害物までの距離が計算できないので、ドア開を不可として処理を終了する(ステップS49)。
以上の説明のように、本第3実施形態によれば、カメラ11-1~11-nの光源(太陽等)に対する位置関係及び周囲環境の明るさ(照度)に基づいて、撮像画像の明るさを調節し、さらに物体(障害物等の対象物)の存在確率を以前の画像認識結果などに基づいて把握して、物体までの距離を測定するので、より高精度で障害物までの距離を把握して、ドア開制御をより確実に行える。
図29は、第3実施形態の変形例の説明図である。
以上の説明においては、ドア開時のドア軌跡内に障害物が有るか否かを判断する際には(ステップS33)、カメラの撮像画像に基づいて行っていたが、車輛状態(車両の傾き)や道路状態によって、カメラの見え方が変わり、ドア軌跡範囲が変わる虞があった。
以上の説明においては、ドア開時のドア軌跡内に障害物が有るか否かを判断する際には(ステップS33)、カメラの撮像画像に基づいて行っていたが、車輛状態(車両の傾き)や道路状態によって、カメラの見え方が変わり、ドア軌跡範囲が変わる虞があった。
そこで、図29に示すように、車両情報(車両の傾き)と車両位置情報(車両が坂にいる等)を取得し(ステップS71)、ドア軌跡範囲を補正する(ステップS72)。
そして、補正したドア軌跡範囲に基づいて、ドア軌跡内外判定を行う(ステップS73)。
この結果、ドア軌跡内外判定をより正確に行うことができる。
そして、補正したドア軌跡範囲に基づいて、ドア軌跡内外判定を行う(ステップS73)。
この結果、ドア軌跡内外判定をより正確に行うことができる。
[4]実施形態の変形例
上述の実施形態では、障害物検出装置10は、例えば1つのコントローラ(ECU)13により構成されることとしたが、これに限られない。障害物検出装置10は複数のECUにより構成されていてもよい。例えば、カメラ画像処理部21及び超音波センサ信号処理部22の機能を一つのECUが担い、総合制御部23及びドア制御部24の機能を他のECUが担うようにしてもよい。
上述の実施形態では、障害物検出装置10は、例えば1つのコントローラ(ECU)13により構成されることとしたが、これに限られない。障害物検出装置10は複数のECUにより構成されていてもよい。例えば、カメラ画像処理部21及び超音波センサ信号処理部22の機能を一つのECUが担い、総合制御部23及びドア制御部24の機能を他のECUが担うようにしてもよい。
上述の第1実施形態では、超音波センサ群12-1~12-nは、それぞれ車両の前後方向に配置された第1超音波センサSN1及び第2超音波センサSN2を備えていたが、これに限られない。例えば、一つのドアに対し3つ以上の超音波センサが設けられてもよい。超音波センサの数を増やすことで、より広範囲の物体をより高精度に検出することが可能となる。
また、以上の説明においては、測距センサとして、超音波センサを用いる場合について説明したが、例えば、超音波センサ以外にも、電波センサや赤外線センサなどの測距センサも適用可能である。
また、以上の説明においては、測距センサとして、超音波センサを用いる場合について説明したが、例えば、超音波センサ以外にも、電波センサや赤外線センサなどの測距センサも適用可能である。
以上、本発明の実施形態を例示したが、上記実施形態および変形例はあくまで一例であって、発明の範囲を限定することは意図していない。上記実施形態や変形例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、組み合わせ、変更を行うことができる。また、各実施形態や各変形例の構成や形状は、部分的に入れ替えて実施することも可能である。
10 障害物検出装置
11-1~11-n カメラ
12-1~12-n 超音波センサ群
13 コントローラ
14A ドア開スイッチ
14B ドア開スイッチ
15 ドア駆動部
21 カメラ画像処理部
22 超音波センサ信号処理部
23 総合制御部
24 ドア制御部
25 記憶部
ADE ドア軌跡エリア
ANG 許容ドア開度
ARC 検出範囲
ASN 検出範囲
GR ガードレール
HM 人
INF1 自車位置情報
INF2 マップ情報
INF3 時間情報
INF4 環境情報
INF5 ドア開度情報
OBJ 障害物
OV 曲線
SN1 第1超音波センサ
SN2 第2超音波センサ
SN 超音波センサ
V 車両
11-1~11-n カメラ
12-1~12-n 超音波センサ群
13 コントローラ
14A ドア開スイッチ
14B ドア開スイッチ
15 ドア駆動部
21 カメラ画像処理部
22 超音波センサ信号処理部
23 総合制御部
24 ドア制御部
25 記憶部
ADE ドア軌跡エリア
ANG 許容ドア開度
ARC 検出範囲
ASN 検出範囲
GR ガードレール
HM 人
INF1 自車位置情報
INF2 マップ情報
INF3 時間情報
INF4 環境情報
INF5 ドア開度情報
OBJ 障害物
OV 曲線
SN1 第1超音波センサ
SN2 第2超音波センサ
SN 超音波センサ
V 車両
Claims (11)
- 超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する超音波センサ信号処理部と、
前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出するカメラ画像処理部と、
前記超音波センサ信号処理部の検出結果及び前記カメラ画像処理部の検出結果に基づいて、前記ドアの開動作制御を行うコントローラと、
を備えた障害物検出装置。 - 前記超音波センサ信号処理部は、一つの前記ドアに対し、複数配置された前記超音波センサの出力に基づいて前記障害物までの距離及び前記障害物の形状を検出する、
請求項1記載の障害物検出装置。 - 前記コントローラは、前記超音波センサ信号処理部及び前記カメラ画像処理部の検出結果において、前記障害物までの距離が同一とみなせ、かつ、前記障害物の形状も同種であると判断した場合に前記ドアの開制御を許可する、
請求項2記載の障害物検出装置。 - 前記コントローラは、前記超音波センサ信号処理部及び前記カメラ画像処理部の検出結果において、前記障害物までの距離が同一とみなせる場合に、前記障害物の手前まで前記ドアの開制御を許可する、
請求項1又は請求項2記載の障害物検出装置。 - 前記コントローラは、前記車両の外部において、前記ドアの開動作を行わせる信号が入力され、前記カメラ画像処理部の検出結果に基づいて前記軌跡範囲の内部に人が検出された場合に、前記人が前記軌跡範囲から前記人が移動した場合に、前記ドアの開制御を許可する、
請求項1乃至請求項4のいずれか一項に記載の障害物検出装置。 - 前記超音波センサは、前記ドアに一つ設けられており、
前記超音波センサ信号処理部は、前記ドアの開動作時に得られる複数の前記障害物までの距離に基づいて、前記障害物までの距離を検出する、
請求項1記載の障害物検出装置。 - 前記カメラ画像処理部は、前記カメラの撮像領域の明るさに基づいて、前記カメラの出力した撮像画像の補正を行い、
前記コントローラは、補正後の前記撮像画像に基づいて、前記撮像画像に含まれる前記障害物の存在確率を取得し、取得した前記存在確率に基づいて物体認識を行う、
請求項1乃至請求項6のいずれか一項に記載の障害物検出装置。 - 前記コントローラは、前記カメラの撮像場所に基づいて、前記障害物の存在確率を取得し、取得した前記存在確率と測距センサの測距結果に基づいて、前記物体認識を行う
請求項7に記載の障害物検出装置。 - 前記カメラ画像処理部は、前記車両の向き及び対象物の陰の影響を除去すべく、前記補正として、前記撮像画像の明るさ補正を行う、
請求項7又は請求項8に記載の障害物検出装置。 - 超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサからの出力及び前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力が入力される障害物検出装置で実行される方法であって、
前記超音波センサからの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する第1過程と、
前記カメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出する第2過程と、
前記第1過程及び前記第2過程の検出結果に基づいて、前記ドアの開動作制御を行う第3過程と、
を備えた方法。 - 超音波により所定の検出範囲内の障害物までの距離を検出する車両のドアに配置された超音波センサからの出力及び前記車両のドアの開時の軌跡範囲及び前記超音波センサの検出範囲を含む領域を撮像する前記車両のカメラの出力が入力される障害物検出装置をコンピュータにより制御するためのプログラムであって、
前記コンピュータを、
前記超音波センサからの出力に基づいて、前記障害物までの距離及び前記障害物の形状のうち、少なくとも前記距離を検出する第1手段と、
前記カメラの出力に基づいて、前記障害物までの距離及び前記障害物の形状を検出する第2手段と、
前記第1手段及び前記第2手段の検出結果に基づいて、前記ドアの開動作制御を行う第3手段と、
を備えたプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021021323A JP2022123787A (ja) | 2021-02-12 | 2021-02-12 | 障害物検出装置、方法及びプログラム |
| CN202210070703.6A CN114924277A (zh) | 2021-02-12 | 2022-01-21 | 障碍物检测装置以及方法 |
| US17/583,448 US20220259914A1 (en) | 2021-02-12 | 2022-01-25 | Obstacle detection device, and method |
| DE102022103099.7A DE102022103099A1 (de) | 2021-02-12 | 2022-02-10 | Hinderniserfassungsvorrichtung, -verfahren und -programm |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021021323A JP2022123787A (ja) | 2021-02-12 | 2021-02-12 | 障害物検出装置、方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022123787A true JP2022123787A (ja) | 2022-08-24 |
Family
ID=82610684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021021323A Pending JP2022123787A (ja) | 2021-02-12 | 2021-02-12 | 障害物検出装置、方法及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220259914A1 (ja) |
| JP (1) | JP2022123787A (ja) |
| CN (1) | CN114924277A (ja) |
| DE (1) | DE102022103099A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200333429A1 (en) * | 2017-12-29 | 2020-10-22 | Ubicquia Iq Llc | Sonic pole position triangulation in a lighting system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005076408A (ja) | 2003-09-03 | 2005-03-24 | Denso Corp | ドア開度制限装置 |
| JP6644985B2 (ja) | 2016-07-14 | 2020-02-12 | 三井金属アクト株式会社 | 開閉システム |
| JP6579144B2 (ja) * | 2017-03-28 | 2019-09-25 | 株式会社Soken | 障害物検知装置 |
| DE102019121638A1 (de) * | 2019-06-04 | 2020-12-10 | Inventus Engineering Gmbh | Verfahren zum Steuern von Türbewegungen einer Tür eines Kraftfahrzeugs und Kraftfahrzeugkomponente |
-
2021
- 2021-02-12 JP JP2021021323A patent/JP2022123787A/ja active Pending
-
2022
- 2022-01-21 CN CN202210070703.6A patent/CN114924277A/zh active Pending
- 2022-01-25 US US17/583,448 patent/US20220259914A1/en active Pending
- 2022-02-10 DE DE102022103099.7A patent/DE102022103099A1/de active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| DE102022103099A1 (de) | 2022-08-18 |
| CN114924277A (zh) | 2022-08-19 |
| US20220259914A1 (en) | 2022-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4639293B2 (ja) | 自動ドアセンサ | |
| EP2045132B1 (en) | Driving support device, driving support method, and computer program | |
| US8442755B2 (en) | Systems and methods for preventing motor vehicle side doors from coming into contact with obstacles | |
| US9352690B2 (en) | Apparatus and method for detecting obstacle adaptively to vehicle speed | |
| CN100472322C (zh) | 前方摄影装置 | |
| US6791461B2 (en) | Object detection sensor | |
| US11008783B2 (en) | Vehicle periphery monitoring apparatus | |
| JP6651031B2 (ja) | 車両ドア衝突防止装置および車両ドア衝突防止方法 | |
| US20070069872A1 (en) | Vehicle driving assist system | |
| US10974735B2 (en) | Parking assistance device | |
| JP4753765B2 (ja) | 障害物認識方法 | |
| CN110249105B (zh) | 自动门传感器、自动门系统以及自动门系统的控制方法 | |
| JP4265931B2 (ja) | 先行車両検出装置 | |
| WO2020157108A1 (en) | Method and system for limiting the movement of a door of a vehicle | |
| JP2010162975A (ja) | 車両制御システム | |
| US20220259914A1 (en) | Obstacle detection device, and method | |
| US9827906B2 (en) | Image processing apparatus | |
| JP2006240454A (ja) | 車両の物体認識装置及び物体認識処理方法 | |
| CN116419072A (zh) | 车辆摄像头动态 | |
| US20220170310A1 (en) | Obstacle detection device, method, and program | |
| JP2000207695A (ja) | 車外監視装置 | |
| KR101028284B1 (ko) | 차량 충돌 방지 방법 | |
| KR20170135288A (ko) | 비전기반의 융합형 물체 감지 장치 및 방법 | |
| CZ2019603A3 (cs) | Způsob detekce překážek nad pátými dveřmi automobilu | |
| KR102500704B1 (ko) | 차량의 자율주행제어장치 및 자율주행제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231206 |