JP2021011202A - 推進システム - Google Patents
推進システム Download PDFInfo
- Publication number
- JP2021011202A JP2021011202A JP2019126834A JP2019126834A JP2021011202A JP 2021011202 A JP2021011202 A JP 2021011202A JP 2019126834 A JP2019126834 A JP 2019126834A JP 2019126834 A JP2019126834 A JP 2019126834A JP 2021011202 A JP2021011202 A JP 2021011202A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- electric motor
- clutch
- state
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 101
- 238000001514 detection method Methods 0.000 claims description 21
- 230000005856 abnormality Effects 0.000 claims description 18
- 239000010705 motor oil Substances 0.000 claims description 8
- 239000000446 fuel Substances 0.000 abstract description 19
- 239000000498 cooling water Substances 0.000 description 9
- 238000010586 diagram Methods 0.000 description 5
- 238000012423 maintenance Methods 0.000 description 3
- 239000003921 oil Substances 0.000 description 3
- 230000036760 body temperature Effects 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 238000010248 power generation Methods 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000001050 lubricating effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63J—AUXILIARIES ON VESSELS
- B63J3/00—Driving of auxiliaries
- B63J3/02—Driving of auxiliaries from propulsion power plant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/20—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0092—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption with use of redundant elements for safety purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/18—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries of two or more battery modules
- B60L58/20—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries of two or more battery modules having different nominal voltages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/12—Use of propulsion power plant or units on vessels the vessels being motor-driven
- B63H21/14—Use of propulsion power plant or units on vessels the vessels being motor-driven relating to internal-combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/12—Use of propulsion power plant or units on vessels the vessels being motor-driven
- B63H21/17—Use of propulsion power plant or units on vessels the vessels being motor-driven by electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H23/00—Transmitting power from propulsion power plant to propulsive elements
- B63H23/30—Transmitting power from propulsion power plant to propulsive elements characterised by use of clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B63H5/08—Arrangements on vessels of propulsion elements directly acting on water of propellers of more than one propeller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/32—Waterborne vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/20—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units
- B63H2021/202—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units of hybrid electric type
- B63H2021/205—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units of hybrid electric type the second power unit being of the internal combustion engine type, or the like, e.g. a Diesel engine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63J—AUXILIARIES ON VESSELS
- B63J3/00—Driving of auxiliaries
- B63J3/04—Driving of auxiliaries from power plant other than propulsion power plant
- B63J2003/046—Driving of auxiliaries from power plant other than propulsion power plant using wind or water driven turbines or impellers for power generation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T70/00—Maritime or waterways transport
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Multiple Motors (AREA)
Abstract
【課題】複数の推進装置を備える船舶において、航行の直進性を保ちながら、複数の推進装置のうち、一部の推進装置を直接駆動するエンジンを停止させることができ、低速航行等の時における燃料消費を低減できる推進システムを提供する。【解決手段】推進システム2において、第1電動モータ4aと第2電動モータ4bは、何れか一方の回転によって発電した電力を他方に供給可能に、互いに電気的に接続されている。第1エンジン3aの停止時において、制御部は、第1クラッチ54を遮断状態に切り換え、第2クラッチ55、第3クラッチ64、及び第4クラッチ65を伝達状態に切り換える。第1プロペラ10aは、第2電動モータ4bが第2エンジン3bからの動力を用いて発電した電力で回転する第1電動モータ4aによって駆動される。第2プロペラ10bは、第2エンジン3bからの動力によって直接駆動される。【選択図】図2
Description
本発明は、複数のプロペラを備える船舶に搭載される推進システムに関する。
従来から、推進装置(例えば、プロペラ)を2つ備える船舶が知られている。特許文献1は、この種の船舶用の電気推進システムを開示する。
特許文献1の電気推進システムは、推進電動機と、電力供給装置と、を備える。推進電動機は、プロペラを駆動する。推進電動機に電力を供給する電力供給装置は、複数のエンジンにより駆動される複数の発電機を具備する。
上記特許文献1のような、複数のプロペラを備え、各プロペラに対する動力源がそれぞれ設けられている船舶においては、特に低速航行時での燃費の向上が望まれていた。また、何れかのエンジンが故障した場合は残りのエンジンの動力で船舶が航行することになるが、この場合の船舶直進性の維持等について、従来から改善の要望があった。
本発明は以上の事情に鑑みてされたものであり、その目的は、複数の推進装置を備える船舶において、航行の直進性を保ちながら、複数の推進装置のうち一部の推進装置に対応するエンジンを停止させることができ、低速航行等の時における燃料消費を低減できる推進システムを提供することにある。
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
本発明の観点によれば、以下の構成の推進システムが提供される。即ち、この推進システムは、少なくとも第1推進装置及び第2推進装置を備える船舶に搭載される。推進システムは、第1エンジンと、第2エンジンと、第1電動モータと、第2電動モータと、第1クラッチと、第2クラッチと、第3クラッチと、第4クラッチと、制御部と、を備える。前記第1エンジンは、前記第1推進装置を直接駆動可能に設けられている。前記第2エンジンは、前記第2推進装置を直接駆動可能に設けられている。前記第1電動モータは、前記第1エンジンと前記第1推進装置との間の第1動力伝達経路の中途部に設けられている。前記第2電動モータは、前記第2エンジンと前記第2推進装置との間の第2動力伝達経路の中途部に設けられている。前記第1クラッチは、前記第1エンジンと前記第1電動モータとの間の前記第1動力伝達経路を接続する第1状態と、当該第1動力伝達経路を切断する第2状態と、を切り換える。前記第2クラッチは、前記第1電動モータと前記第1推進装置との間の前記第1動力伝達経路を接続する第1状態と、当該第1動力伝達経路を切断する第2状態と、を切り換える。前記第3クラッチは、前記第2エンジンと前記第2電動モータとの間の前記第2動力伝達経路を接続する第1状態と、当該第2動力伝達経路を切断する第2状態と、を切り換える。前記第4クラッチは、前記第2電動モータと前記第2推進装置との間の前記第2動力伝達経路を接続する第1状態と、当該第2動力伝達経路を切断する第2状態と、を切り換える。前記制御部は、前記第1クラッチ、前記第2クラッチ、前記第3クラッチ、及び前記第4クラッチ、のそれぞれにおける前記第1状態及び前記第2状態の切換を制御する。前記第1電動モータと前記第2電動モータは、何れか一方の回転によって発電した電力を他方に供給可能に、互いに電気的に接続されている。前記第1エンジンの停止時において、前記制御部は、前記第1クラッチを前記第2状態に切り換え、前記第2クラッチ、前記第3クラッチ及び前記第4クラッチを前記第1状態に切り換える。前記第1推進装置は、前記第2電動モータが前記第2エンジンからの動力を用いて発電した電力で回転する前記第1電動モータによって駆動される。前記第2推進装置は、前記第2エンジンからの動力によって駆動される。
これにより、航行の直進性を保ちながら1つのエンジンを停止させることができ、低速航行時等における燃料消費の低減を実現できる。また、1つのエンジンが故障した場合でも、残りのエンジンの動力を複数の推進装置に分配して駆動できるので、船舶の直進性を良好に維持することができる。
前記の推進システムにおいて、前記第1電動モータと前記第2電動モータのそれぞれは、同一の蓄電装置に接続されていることが好ましい。
これにより、第1電動モータ又は第2電動モータで発電した電力を蓄電装置に蓄電することができるとともに、蓄電装置が蓄電した電力で第1電動モータ及び/又は第2電動モータを駆動することができる。
前記の推進システムは、下記の構成とすることが好ましい。即ち、前記制御部は、前記船舶の航行速度が所定速度以下である場合、前記第1エンジン及び前記第2エンジンの何れかを停止させる。停止された前記第1エンジン又は前記第2エンジンに対応する前記第1推進装置又は前記第2推進装置は、前記第1電動モータ及び前記第2電動モータによって変換された、停止されていない前記第2エンジン又は前記第1エンジンの動力で駆動される。
これにより、低速航行時において、一部のエンジンを停止させることで、稼動するエンジンの効率を向上することができ、燃料消費を低減することができる。
前記の推進システムにおいて、前記制御部は、前記第1エンジン及び前記第2エンジンと、前記第1電動モータ及び前記第2電動モータと、のうち何れの負荷及び回転数のうち少なくとも1つに基づいて、前記第1エンジン又は前記第2エンジンの稼動を停止するか否かを判定することが好ましい。
これにより、エンジン又は電動モータの稼動状態に応じて、稼動するエンジンの台数を適切に決定することができる。
前記の推進システムにおいて、前記制御部は、前記第1エンジン及び前記第2エンジンと、前記第1電動モータ及び前記第2電動モータと、の両方のそれぞれにおける負荷及び回転数のうち少なくとも1つに基づいて、前記第1エンジン又は前記第2エンジンの稼動を停止するか否かを判定することが好ましい。
これにより、エンジン及び電動モータの稼動状態に応じて、稼動するエンジンの台数をより一層適切に決定することができる。
前記の推進システムは、前記第1エンジン及び前記第2エンジンの異常を検出する異常検出部を備えることが好ましい。
これにより、エンジンに異常が発生する場合、当該エンジンを自動的に停止させることができる。
前記の推進システムにおいて、前記異常検出部は、前記第1エンジン及び前記第2エンジンのエンジンオイル圧、回転数、エンジン温度の少なくとも1つを検出可能に構成されていることが好ましい。
これにより、エンジンの異常を容易に検出することができる。
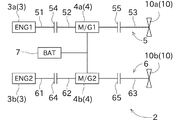
次に、図面を参照して本発明の実施の形態を説明する。図1は、本発明の一実施形態に係る推進システム2が搭載された船舶1の例を示す斜視図である。図2は、第1実施形態の推進システム2の構成を示す模式図である。図3は、第1実施形態の推進システム2の構成を示すブロック図である。
図1に示す船舶1は、2つのプロペラ(推進装置)10を備え、2軸推進方式を採用する船舶として構成されている。しかし、これに限定されず、船舶が3つ以上のプロペラを備え、3軸以上の推進方式を採用しても良い。
それぞれのプロペラ10は、複数のブレードから構成され、図略のプロペラシャフトに固定されている。プロペラ10は、プロペラシャフトを介して後述のエンジン3及び/又は電動モータ4から伝達された駆動力を、回転軸方向における推進力に変換する。
船舶1に搭載された本実施形態の推進システム2は、図2に示すように、プロペラ10を駆動するための2種類の駆動源(即ち、エンジン3及び電動モータ4)を備えるハイブリッド推進システムとして構成されている。
推進システム2には、それぞれのプロペラ10に対して、エンジン3及び電動モータ4からなる駆動源セットが1セットずつ設けられている。即ち、推進システム2は、搭載された船舶1が備えるプロペラ10の個数分の駆動源セットを備える。
図2には、例として、船舶1が備えるプロペラ10の数に応じて、駆動源セットを2つ備える推進システム2を示している。
以下の説明においては、プロペラ10、エンジン3、電動モータ4のそれぞれを特定するために、図2の上側に描かれたプロペラ10、エンジン3、及び電動モータ4を、第1プロペラ(第1推進装置)10a、第1エンジン3a、及び第1電動モータ4aと呼ぶことがある。また、図2の下側に描かれたプロペラ10、エンジン3、及び電動モータ4を、第2プロペラ(第2推進装置)10b、第2エンジン3b、及び第2電動モータ4bと呼ぶことがある。
エンジン3は、船舶用の公知のディーゼルエンジンから構成され、船舶1に動力を提供する主機関として機能する。詳細は図示しないが、エンジン3には、シリンダやピストン等によって区画された燃焼室が形成される。各燃焼室では、図略の過給機を介して供給された空気を圧縮し、図略のインジェクタを介して、高温になった圧縮空気に燃料を噴射することにより、燃料を自然着火燃焼させ、ピストンを押して運動させる。
第1エンジン3aは、第1プロペラ10aを直接駆動可能に設けられている。図2に示すように、第1エンジン3aで発生した動力は、第1動力伝達経路5を介して、第1プロペラ10aに伝達される。
第1動力伝達経路5は、第1プロペラ10aから遠い側から順に設けられた第1伝達軸51と、第2伝達軸52と、第3伝達軸53と、を備える。第1動力伝達経路5は更に、第1動力伝達経路5における動力の伝達/遮断を切り換える第1クラッチ54及び第2クラッチ55を備える。
第1伝達軸51は、第1エンジン3aの出力軸として構成されても良いし、第1エンジン3aの出力軸に接続された軸として構成されても良い。第3伝達軸53は、第1プロペラが固定されるプロペラシャフトとして構成されても良いし、当該プロペラシャフトに接続された軸として構成されても良い。
第1クラッチ54は、例えば公知の油圧クラッチとして構成され、第1伝達軸51と第2伝達軸52との間に設けられている。第1クラッチ54は、第1伝達軸51からの動力を第2伝達軸52に伝達する伝達状態(第1状態)と、第1伝達軸51からの動力を第2伝達軸52に対して遮断する遮断状態(第2状態)と、の間で切換可能に構成されている。
第2クラッチ55は、第1クラッチ54と同様に公知の油圧クラッチとして構成され、第2伝達軸52と第3伝達軸53との間に設けられている。第2クラッチ55は、第2伝達軸52からの動力を第3伝達軸53に伝達する伝達状態(第1状態)と、第2伝達軸52からの動力を第3伝達軸53に対して遮断する遮断状態(第2状態)と、の間で切換可能に構成されている。
第2エンジン3bは、第2プロペラ10bを直接駆動可能に設けられている。図2に示すように、第2エンジン3bで発生した動力は、第2動力伝達経路6を介して、第2プロペラ10bに伝達される。
第2動力伝達経路6は、第2プロペラ10bから遠い側から順に設けられた第4伝達軸61と、第5伝達軸62と、第6伝達軸63と、を備える。第2動力伝達経路6は更に、第2動力伝達経路6における動力の伝達/切断を切り換える第3クラッチ64及び第4クラッチ65を備える。
第4伝達軸61は、第2エンジン3bの出力軸として構成されても良いし、第2エンジン3bの出力軸に接続された軸として構成されても良い。第6伝達軸63は、第2プロペラ10bが固定されるプロペラシャフトとして構成されても良いし、当該プロペラシャフトに接続された軸として構成されても良い。
第3クラッチ64及び第4クラッチ65の構成は、第1クラッチ54及び第2クラッチ55と実質的に同様であるため、説明を省略する。
それぞれの電動モータ4は、電動機及び発電機として兼用されるモータジェネレータとして機能する。即ち、電動モータ4は、船舶1に動力を提供するサブ機関として機能することもでき、エンジン3からの動力によって発電することもできる。電動モータ4は、電動機として機能する場合、例えば、図3に示すモータドライバ40により制御される。
なお、以下の説明においては、各電動モータ4を駆動するモータドライバ40のそれぞれを特定するために、第1電動モータ4aを制御するモータドライバ40を第1モータドライバ40aと呼び、第2電動モータ4bを制御するモータドライバ40を第2モータドライバ40bと呼ぶことがある。
モータドライバ40は、インバータを備え、電動モータ4に流れる電流の大きさ、方向、タイミング等を制御するとともに、電動モータ4の回転方向、回転数等を制御する。モータドライバ40は、後述の制御部9と電気的に接続され、制御部9からの制御指令に従って、電動モータ4の動作を制御する。
第1電動モータ4aは、第1動力伝達経路5(具体的には、第2伝達軸52)の中途部に設けられている。図示しないが、第1電動モータ4aは、例えば、その回転軸が、図略のモータ用クラッチを介して第2伝達軸52に接続されている。
即ち、第1電動モータ4aの回転軸と第2伝達軸52とを連結するモータ用クラッチの状態(伝達状態/遮断状態)に応じて、第1電動モータ4aは、その回転軸と第2伝達軸52との間で動力が互いに伝達可能な動作状態と、その回転軸と第2伝達軸52との間の動力伝達が遮断された停止状態と、の間で切換可能に設けられている。
ところで、上記動作状態は、駆動状態と、発電状態と、を含む。駆動状態では、第1電動モータ4aが電動機として機能し、第1電動モータ4aからの動力がその回転軸及び上記モータ用クラッチを介して第2伝達軸52に伝達され、第1エンジン3aをトルクアシストする。発電状態では、第1電動モータ4aが発電機として機能し、第2伝達軸52からの動力が上記モータ用クラッチを介して第1電動モータ4aの回転軸に伝達され、その回転軸の回転によって発電する。
上記停止状態は、第1電動モータ4aが動作しているか否かに関わらず、上記モータ用クラッチの状態によって第1電動モータ4aの回転軸と第2伝達軸52との間の動力伝達が行われない状態を示している。即ち、停止状態においては、第1電動モータ4aが停止しても良いし、動作しても良い。なお、省エネルギーの観点から見た場合、停止状態において、第1電動モータ4aを停止させることが好ましい。
第2電動モータ4bは、第2動力伝達経路6(具体的には、第5伝達軸62)の中途部に設けられている。図示しないが、第2電動モータ4bは、例えば、その回転軸が、図略のモータ用クラッチを介して第5伝達軸62に接続されている。
即ち、第2電動モータ4bの回転軸と第5伝達軸62とを連結するモータ用クラッチの状態に応じて、第2電動モータ4bは、その回転軸と第5伝達軸62との間で動力が互いに伝達可能な動作状態と、その回転軸と第5伝達軸62との間の動力伝達が遮断された停止状態と、の間で切換可能に設けられている。第2電動モータ4bの動作状態及び停止状態は、第1電動モータ4aと同様であるため、詳細な説明を省略する。
電動モータ4より下流側の第1動力伝達経路5及び第2動力伝達経路6には、図略の減速機を設けることが好ましい。この構成では、エンジン3及び/又は電動モータ4からの動力が減速機によって減速された後に、プロペラ10に供給される。
図2に示すように、第1電動モータ4aと第2電動モータ4bが互いに電気的に接続されている。即ち、第1電動モータ4aは、第2電動モータ4bで生成された電力によって回転駆動される。第2電動モータ4bは、第1電動モータ4aで生成された電力によって回転駆動される。
本実施形態の推進システム2は、図2に示すように、第1電動モータ4a及び第2電動モータ4bの何れとも電気的に接続されるバッテリー(蓄電装置)7を備える。
バッテリー7は、第1電動モータ4a及び/又は第2電動モータ4bが電動機として機能する場合、第1電動モータ4a及び/又は第2電動モータ4bに電力を提供する。第1電動モータ4a及び/又は第2電動モータ4bが発電機として機能する場合、第1電動モータ4a及び/又は第2電動モータ4bで生成した電力が、当該バッテリー7での充電のために供給される。
また、本実施形態の推進システム2は、図3に示すように、エンジン3、電動モータ4、及び上述のそれぞれのクラッチの動作(状態切換)を制御する制御部9を備える。
制御部9は、例えば、エンジン3の稼動を制御するECU(Engine Control Unit)として構成される。制御部9は、CPU、ROM、RAM、HDD等を備えるコンピュータである。ROMには、エンジン3及びモータドライバ40(言い換えれば、電動モータ4)を制御するためのプログラム、及び、予め設定された様々な閾値等が記憶されている。
本実施形態の推進システム2は、エンジン3の稼動状態に関する情報を検出する様々なセンサから構成されたエンジン状態検出部90を備える。制御部9は、エンジン状態検出部90により検出された様々な検出値に基づいて、エンジン3及び電動モータ4の動作を制御する。
エンジン状態検出部90は、例えば、トルクセンサ91、回転数センサ92、オイル圧センサ93、冷却水温度センサ94等を含む。
トルクセンサ91は、例えば、歪ゲージを用いてトルクを検出するフランジ型のセンサを用い、エンジン3のトルク(負荷)を検出する。しかし、これに限定されず、トルクセンサ91は、磁歪式、圧電式、光学式、バネ式、静電容量式等のセンサを用いることもできる。
回転数センサ92は、例えば、エンジン3が備える図略のクランク軸の回転を検出するクランク角センサとして構成され、エンジン3の回転数を検出する。
オイル圧センサ93は、例えば、エンジン3を潤滑するためのエンジンオイルが通る図略のオイル循環経路の適宜の位置に設けられ、エンジン3のエンジンオイル圧力を検出する。
冷却水温度センサ94は、例えば、エンジン3の本体を冷却する冷却水が流れる図略の冷却水循環経路の適宜の位置に設けられ、エンジン3の冷却水温度を検出する。
制御部9は、例えば、冷却水温度センサ94により検出された冷却水温度に基づいて、エンジン3の本体温度(エンジン温度)が正常であるか否か(エンジン3がオーバーヒートしたか否か)を判定することができる。即ち、制御部9は、冷却水温度センサ94を介いてエンジン温度を監視し、エンジン温度に異常が発生する場合、当該異常を検出することができる。
なお、これに限定されず、制御部9は、例えば、エンジンオイル温度や、吸気マニホールドにおける吸気温度や、排気マニホールドにおける排気温度等を用いてエンジン3の本体温度が正常であるか否かを判定しても良い。
また、制御部9は、エンジン状態検出部90により検出された様々な検出値(例えば、エンジンオイル圧力、回転数、冷却水温度等)に基づいて、エンジン3に異常が発生したか否かを判定することができる。即ち、当該エンジン状態検出部90は、エンジン3の異常検出部としても機能する。
次に、本実施形態の推進システム2が有する複数の駆動モードについて説明する。この駆動モードには、電動推進モードと、エンジン推進モードと、推進充電モードと、ハイブリッド推進モードと、低燃費推進モードと、が含まれている。
なお、エンジン推進モード、推進充電モード、及びハイブリッド推進モードは、従来から知られているため、ここでこれらのモードについて簡単に説明する。
エンジン推進モードでは、2つのエンジン3がともに稼動され、2つの電動モータ4が停止されている。制御部9は、第1クラッチ54、第2クラッチ55、第3クラッチ64、及び第4クラッチ65の何れも伝達状態に切り換えさせ、モータ用クラッチを遮断状態に切り換えさせる。この結果、プロペラ10は、対応するエンジン3からの動力により直接回転駆動される。
推進充電モードでは、2つのエンジン3がともに稼動され、2つの電動モータ4が発電機として機能する。制御部9は、第1クラッチ54、第2クラッチ55、第3クラッチ64、第4クラッチ65、及びモータ用クラッチの何れも伝達状態に切り換えさせる。
この結果、プロペラ10は、対応するエンジン3からの動力により直接回転駆動されるとともに、エンジン3からの動力の一部がモータ用クラッチ等を介して電動モータ4に伝達され、電動モータ4を発電させる。電動モータ4で生成した電力がバッテリー7の充電のためにバッテリー7に供給される。
なお、推進充電モードにおいては、2つの電動モータ4のうち少なくとも1つが発電機として機能することができる。この場合、発電機として機能しない電動モータ4が停止し、それに対応するモータ用クラッチが遮断状態に切り換えられることが好ましい。
ハイブリッド推進モードでは、2つのエンジン3ともに稼動され、2つの電動モータ4が電動機として機能する。制御部9は、第1クラッチ54、第2クラッチ55、第3クラッチ64、第4クラッチ65、及びモータ用クラッチの何れも伝達状態に切り換えさせる。
この結果、電動モータ4は、バッテリー7からの電力によってその回転軸が回転することで、エンジン3(第2伝達軸52及び第5伝達軸62)をトルクアシストする。即ち、プロペラ10が、エンジン3及び電動モータ4からの動力によって回転駆動される。
続いて、本実施形態の推進システム2の低燃費推進モードについて図2等を参照して詳細に説明する。当該低燃費推進モードは、例えば、船舶1のトローリング等の低速航行時、又は、低負荷時において実行される。
具体的には、制御部9は、船舶1に搭載された図略の航行速度検出部により検出された船舶1の航行速度を用いて、現在船舶1が低速航行しているか否かを判定する。
航行速度検出部は、例えば電磁式、音響式等の船速計から構成され、船舶1の航行速度(例えば対水速度)を検出する。航行速度検出部は、検出した航行速度を制御部9に送信可能に設けられている。
制御部9は、航行速度検出部により検出された航行速度が予め設定された所定速度より大きい場合、船舶1が高速航行していると判定し、検出された航行速度が所定速度以下である場合、船舶1が低速航行していると判定する。
制御部9は、船舶1が低速航行していると判定した場合、低燃費推進モードに切り換えて船舶1を推進する。この場合、制御部9は、例えば、船舶1の航行速度に応じて、停止するエンジン3の数を決めれば良い。
また、制御部9は、例えば、トルクセンサ91により検出されたエンジン3の負荷に基づいて、一部のエンジン3を停止し、低燃費推進モードに切り換えるか否かを判定することもできる。
エンジン3の負荷が予め設定された所定負荷より大きい場合、エンジン3を停止させない、即ち、低燃費推進モードに切り換えない。エンジン3の負荷が所定負荷以下である場合、制御部9は、複数のエンジン3のうち、少なくとも1台のエンジン3が稼動するように、他のエンジン3に対して、停止する対象のエンジン3及び停止する数等を決める。停止するエンジン3の数は、例えば、検出されたエンジン3の負荷に基づいて決定することができる。
低燃費推進モードでは、制御部9は、備えるエンジン3を交替に稼動するように、他のエンジン3を停止させている。例えば、低燃費推進モードを実行する度に、停止させるエンジン3をローテーションで順番に異ならせる。これにより、それぞれのエンジン3の稼動時間の偏りを抑制することができ、稼動時間に基づくメンテナンスのタイミングを合わせることが容易になる。
なお、これに限定されず、制御部9は、エンジン3の負荷の代わりに、又は、負荷に加えて、エンジン3の回転数に基づいて、低燃費推進モードに切り換えるか否かを判定しても良い。
また、推進システム2は、ハイブリッド推進モードで船舶1を推進している場合、制御部9は、エンジン3の負荷及び/又は回転数の代わりに、電動モータ4の負荷及び/又は回転数に基づいて、低燃費推進モードに切り換えるか否かを判定しても良いし、エンジン3及び電動モータ4の両方の負荷及び/又は回転数に基づいて、低燃費推進モードに切り換えるか否かを判定しても良い。
これにより、船舶1が低速航行しているときにおいて、エンジン3の負荷が低い場合、一部のエンジン3を停止させることで、燃料消費の低減を実現することができる。また、稼動しているエンジン3で複数のプロペラ10を駆動することになるので、エンジン1つあたりの負荷を増加させることで、稼動中のエンジン3の燃費を向上することができる。
そして、エンジン3を停止させることで、エンジン3の稼動時間を短くすることができ、稼動時間に基づくメンテナンスの周期を延ばすことができる。
上記のように、船舶1が低速航行する場合、又は、エンジン3及び/又は電動モータ4の負荷及び又は回転数が所定閾値以下である場合、制御部9は、低燃費推進モードを実行する必要があると判定し、低燃費推進モードに切り換え、例えば、図2に示す第1エンジン3aの稼動を停止させる。
この場合、制御部9は、第1クラッチ54を遮断状態に切り換えさせ、第2クラッチ55、第3クラッチ64、第4クラッチ65、及びそれぞれの電動モータ4に対応する2つモータ用クラッチを伝達状態に切り換えさせる。
第1電動モータ4aは、バッテリー7からの電力によって回転駆動され、生成した動力が第3伝達軸53等を介して第1プロペラ10aに伝達され、第1プロペラ10aを回転駆動させる。
第2電動モータ4bは、発電機として機能し、第2エンジン3bからの動力を電力に変換して、バッテリー7の充電に供給する。
なお、これに限定されず、例えば、第2電動モータ4bにおいて、第2エンジン3bからの動力を用いて変換した電力を、第1電動モータ4aの回転に直接供給しても良いし、第1電動モータ4aの回転及びバッテリー7の充電の両方に供給しても良い。
このように、少なくとも1つのエンジン3(例えば第2エンジン3b)を主動力源として稼動させ、当該エンジン3により直接駆動されない他のプロペラ10(例えば第1プロペラ10a)を、バッテリー7からの電力、又は当該第2エンジン3bの動力から変換した電力で回転駆動することができる。
この結果、1つのエンジン3によって、2つのプロペラ10に動力を提供することができ、船舶1の直進性を保つことができる。そして、一部のエンジン3を停止させることができ、燃料消費の低減を図ることができるとともに、稼動するエンジン3の燃費を向上することもできる。
また、本実施形態の推進システム2においては、上記エンジン状態検出部90を介して何れかのエンジン3に異常を検出した場合、当該エンジン3を停止させ、上記低速航行時と同様に、バッテリー7又は、稼動している他のエンジン3の動力から変換された電力で、停止されたエンジン3により直接駆動されるプロペラ10を回転駆動する。即ち、一部のエンジン3が故障した場合においても、船舶1の直進性を保ちながら推進することができる。
当該エンジン3の異常の検出は、制御部9が、エンジン状態検出部90から検出された様々な検出値に基づいて行うことができる。例えば、エンジンオイル圧力、エンジン温度、回転数を反映する検出値が、予め設定された正常閾値範囲から外れているか否かを制御部9が判定することが考えられる。
以上に説明したように、本実施形態の推進システム2は、少なくとも第1プロペラ10a及び第2プロペラ10bを備える船舶1に搭載される。推進システム2は、第1エンジン3aと、第2エンジン3bと、第1電動モータ4aと、第2電動モータ4bと、第1クラッチ54と、第2クラッチ55と、第3クラッチ64と、第4クラッチ65と、制御部9と、を備える。第1エンジン3aは、第1プロペラ10aを直接駆動可能に設けられている。第2エンジン3bは、第2プロペラ10bを直接駆動可能に設けられている。第1電動モータ4aは、第1エンジン3aと第1プロペラ10aとの間の第1動力伝達経路5の中途部に設けられている。第2電動モータ4bは、第2エンジン3bと第2プロペラ10bとの間の第2動力伝達経路6の中途部に設けられている。第1クラッチ54は、第1エンジン3aと第1電動モータ4aとの間の第1動力伝達経路5を接続する伝達状態と、当該第1動力伝達経路5を切断する遮断状態と、を切り換える。第2クラッチ55は、第1電動モータ4aと第1プロペラ10aとの間の第1動力伝達経路5を接続する伝達状態と、当該第1動力伝達経路5を切断する遮断状態と、を切り換える。第3クラッチ64は、第2エンジン3bと第2電動モータ4bとの間の第2動力伝達経路6を接続する伝達状態と、当該第2動力伝達経路6を切断する遮断状態と、を切り換える。第4クラッチ65は、第2電動モータ4bと第2プロペラ10bとの間の第2動力伝達経路6を接続する伝達状態と、当該第2動力伝達経路6を切断する遮断状態と、を切り換える。制御部9は、第1クラッチ54、第2クラッチ55、第3クラッチ64、及び第4クラッチ65、のそれぞれにおける伝達状態及び遮断状態の切換を制御する。第1電動モータ4aと第2電動モータ4bは、何れか一方の回転によって発電した電力を他方に供給可能に、互いに電気的に接続されている。第1エンジン3aの停止時において、制御部9は、第1クラッチ54を遮断状態に切り換え、第2クラッチ55、第3クラッチ64、及び第4クラッチ65を伝達状態に切り換える。第1プロペラ10aは、第2電動モータ4bが第2エンジン3bからの動力を用いて発電した電力で回転する第1電動モータ4aによって駆動される。第2プロペラ10bは、第2エンジン3bからの動力によって駆動される。
これにより、負荷が低い状況下でも1つのエンジン3の駆動力を複数のプロペラ10に実質的に分配することで、全てのエンジン3を駆動する場合よりもエンジン3の高効率領域を利用し易くなり、燃料消費の低減を実現することができる。また、1つのエンジン3が故障した場合でも、残りのエンジン3で複数のプロペラ10を同時に駆動できるので、船舶1の直進性を良好に維持することができる。
また、本実施形態の推進システム2において、第1電動モータ4aと第2電動モータ4bのそれぞれは、同一のバッテリー7に接続されている。
これにより、第1電動モータ4a又は第2電動モータ4bで発電した電力をバッテリー7に蓄電することができるとともに、バッテリー7が蓄電した電力で第1電動モータ4a及び/又は第2電動モータ4bを駆動することができる。
また、本実施形態の推進システム2において、制御部9は、船舶1の航行速度が所定速度以下である場合、第1エンジン3a及び第2エンジン3bの何れかを停止させる。停止した第1エンジン3a又は第2エンジン3bに対応する第1プロペラ10a又は第2プロペラ10bは、第1電動モータ4a及び第2電動モータ4bによって変換された、停止していない第2エンジン3b又は第1エンジン3aの動力で駆動される。
これにより、低速航行時において、一部のエンジン3を停止させることで、稼動するエンジン3の効率を向上することができ、燃料消費を低減することができる。
また、本実施形態の推進システム2において、制御部9は、第1エンジン3a及び第2エンジン3bと、第1電動モータ4a及び第2電動モータ4bと、のうち何れかの負荷及び回転数のうち、少なくとも1つに基づいて、第1エンジン3a又は第2エンジン3bの稼動を停止するか否かを判定する。
これにより、エンジン3又は電動モータ4の稼動状態に応じて、稼動するエンジン3の数を適切に決定することができる。
また、本実施形態の推進システム2において、制御部9は、第1エンジン3a及び第2エンジン3bと、第1電動モータ4a及び第2電動モータ4bと、の両方のそれぞれにおける負荷及び回転数のうち、少なくとも1つに基づいて、第1エンジン3a又は第2エンジン3bの稼動を停止するか否かを判定する。
これにより、エンジン3又は電動モータ4の稼動状態に応じて、稼動するエンジン3の数を一層適切に決定することができる。
また、本実施形態の推進システム2は、第1エンジン3a及び第2エンジン3bの異常を検出する異常検出部(エンジン状態検出部90)を備える。
これにより、エンジン3に異常が発生する場合、当該エンジン3を自動的に停止させることができる。
また、本実施形態の推進システム2において、エンジン状態検出部90は、第1エンジン3a、第2エンジン3bのエンジンオイル圧、回転数、エンジン温度の少なくとも1つを検出可能に構成されている。
これにより、エンジンの異常を容易に検出することができる。
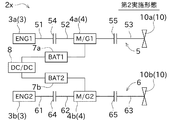
次に、第2実施形態を説明する。図4は、第2実施形態の推進システム2xの構成を示す模式図である。なお、本実施形態の説明においては、前述の実施形態と同一又は類似の部材には図面に同一の符号を付し、説明を省略する場合がある。
本実施形態の推進システム2xにおいては、図4に示すように、バッテリー7の代わりに、第1バッテリー7aと、第2バッテリー7bと、DC/DCコンバータ8と、を備える。第1電動モータ4a及び第2電動モータ4bは、直接接続されず、第1バッテリー7a、DC/DCコンバータ8、及び第2バッテリー7bを介して間接的に接続されている。
第1バッテリー7aは、第1電動モータ4aにより直接充電されるように、第1電動モータ4aに電気的に接続されている。
第2バッテリー7bは、第2電動モータ4bにより直接充電されるように、第2電動モータ4bに電気的に接続されている。
DC/DCコンバータ8は、第1バッテリー7a及び第2バッテリー7bの間に設けられた双方向DC/DCコンバータとして構成される。DC/DCコンバータ8は、第1バッテリー7a(第2バッテリー7b)が、第2バッテリー7b(第1バッテリー7a)により充電されることと、第2バッテリー7b(第1バッテリー7a)に対して放電することと、の間で切り換えるために用いられる。
この構成により、第1バッテリー7aが第2バッテリー7bからの電力によって充電することができる。即ち、第1バッテリー7aは、第2電動モータ4bによって間接的に充電することができる。
上記と同様に、第2バッテリー7bが第1バッテリー7aからの電力によって充電することができる。即ち、第2バッテリー7bは、第1電動モータ4aによって間接的に充電することができる。
この構成で、第1エンジン3aが停止された低燃費推進モードでは、第1電動モータ4aが第1バッテリー7aからの電力によって回転駆動される。第1バッテリー7aの電力が少なくなった場合、第2バッテリー7bからの電力(ひいては第2電動モータ4bで発電した電力)によって充電される。
これと同様に、第2エンジン3bが停止された低燃費推進モードでは、第2電動モータ4bが第2バッテリー7bからの電力によって回転駆動される。第2バッテリー7bの電力が少なくなった場合、第1バッテリー7aからの電力(ひいては第1電動モータ4aで発電した電力)によって充電される。
即ち、上記の第1実施形態と同様に、1つのエンジン3により複数のプロペラ10のそれぞれに直接又は間接的に動力を提供することができ、低速航行時における燃料消費の低減、及び一部のエンジン3の故障時における直進性の維持を実現することができる。
次に、第3実施形態を説明する。図5は、第3実施形態の推進システム2yの構成を示す模式図である。なお、本変形例の説明においては、前述の実施形態と同一又は類似の部材には図面に同一の符号を付し、説明を省略する場合がある。
本実施形態の推進システム2yにおいては、バッテリー7を備えずに、第1電動モータ4aと第2電動モータ4bとが直接接続されている。即ち、低燃費推進モードでは、第1エンジン3aが停止された場合、第2電動モータ4bは、発電機として機能し、発電した電力で第1電動モータ4aを回転駆動させる。第2エンジン3bが停止された場合、第1電動モータ4aは、発電機として機能し、発電した電力で第2電動モータ4bを回転駆動させる。
即ち、上記の第1実施形態及び第2実施形態と同様に、1つのエンジン3により複数のプロペラ10のそれぞれに直接又は間接的に動力を提供することができ、低速航行時における燃料消費の低減、及び一部のエンジン3の故障時における直進性の維持を実現することができる。
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
バッテリー7(第1バッテリー7a及び第2バッテリー7b)は、港で充電可能に構成されても良い。
制御部9は、船舶1の航行速度に加えて、エンジン3及び/又は電動モータ4の負荷及び/又は回転数を用いて、低燃費推進モードに切り換えるか否かを判定しても良い。
1 船舶
10a 第1プロペラ(第1推進装置)
10b 第2プロペラ(第2推進装置)
2 推進システム
3a 第1エンジン
3b 第2エンジン
4a 第1電動モータ
4b 第2電動モータ
5 第1動力伝達経路
54 第1クラッチ
55 第2クラッチ
6 第2動力伝達経路
64 第3クラッチ
65 第4クラッチ
10a 第1プロペラ(第1推進装置)
10b 第2プロペラ(第2推進装置)
2 推進システム
3a 第1エンジン
3b 第2エンジン
4a 第1電動モータ
4b 第2電動モータ
5 第1動力伝達経路
54 第1クラッチ
55 第2クラッチ
6 第2動力伝達経路
64 第3クラッチ
65 第4クラッチ
Claims (7)
- 少なくとも第1推進装置及び第2推進装置を備える船舶に搭載される推進システムであって、
前記第1推進装置を直接駆動可能に設けられた第1エンジンと、
前記第2推進装置を直接駆動可能に設けられた第2エンジンと、
前記第1エンジンと前記第1推進装置との間の第1動力伝達経路の中途部に設けられた第1電動モータと、
前記第2エンジンと前記第2推進装置との間の第2動力伝達経路の中途部に設けられた第2電動モータと、
前記第1エンジンと前記第1電動モータとの間の前記第1動力伝達経路を接続する第1状態と、当該第1動力伝達経路を切断する第2状態と、を切り換える第1クラッチと、
前記第1電動モータと前記第1推進装置との間の前記第1動力伝達経路を接続する第1状態と、当該第1動力伝達経路を切断する第2状態と、を切り換える第2クラッチと、
前記第2エンジンと前記第2電動モータとの間の前記第2動力伝達経路を接続する第1状態と、当該第2動力伝達経路を切断する第2状態と、を切り換える第3クラッチと、
前記第2電動モータと前記第2推進装置との間の前記第2動力伝達経路を接続する第1状態と、当該第2動力伝達経路を切断する第2状態と、を切り換える第4クラッチと、
前記第1クラッチ、前記第2クラッチ、前記第3クラッチ、及び前記第4クラッチ、のそれぞれにおける前記第1状態及び前記第2状態の切換を制御する制御部と、
を備え、
前記第1電動モータと前記第2電動モータは、何れか一方の回転によって発電した電力を他方に供給可能に、互いに電気的に接続されており、
前記第1エンジンの停止時において、
前記制御部は、前記第1クラッチを前記第2状態に切り換え、前記第2クラッチ、前記第3クラッチ、及び前記第4クラッチを前記第1状態に切り換え、
前記第1推進装置は、前記第2電動モータが前記第2エンジンからの動力を用いて発電した電力で回転する前記第1電動モータによって駆動され、
前記第2推進装置は、前記第2エンジンからの動力によって駆動されることを特徴とする推進システム。 - 請求項1に記載の推進システムであって、
前記第1電動モータと前記第2電動モータのそれぞれは、同一の蓄電装置に接続されていることを特徴とする推進システム。 - 請求項1又は2に記載の推進システムであって、
前記制御部は、前記船舶の航行速度が所定速度以下である場合、前記第1エンジン及び前記第2エンジンの何れかを停止させ、
停止された前記第1エンジン又は前記第2エンジンに対応する前記第1推進装置又は前記第2推進装置は、前記第1電動モータ及び前記第2電動モータによって変換された、停止されていない前記第2エンジン又は前記第1エンジンの動力で駆動されることを特徴とする推進システム。 - 請求項1から3までの何れか一項に記載の推進システムであって、
前記制御部は、前記第1エンジン及び前記第2エンジンと、前記第1電動モータ及び前記第2電動モータと、のうち何れの負荷及び回転数のうち、少なくとも1つに基づいて、前記第1エンジン又は前記第2エンジンの稼動を停止するか否かを判定することを特徴とする推進システム。 - 請求項1から3までの何れか一項に記載の推進システムであって、
前記制御部は、前記第1エンジン及び前記第2エンジンと、前記第1電動モータ及び前記第2電動モータと、の両方のそれぞれにおける負荷及び回転数のうち、少なくとも1つに基づいて、前記第1エンジン又は前記第2エンジンの稼動を停止するか否かを判定することを特徴とする推進システム。 - 請求項1から5までの何れか一項に記載の推進システムであって、
前記第1エンジン及び前記第2エンジンの異常を検出する異常検出部を備えることを特徴とする推進システム。 - 請求項6に記載の推進システムであって、
前記異常検出部は、前記第1エンジン及び前記第2エンジンのエンジンオイル圧、回転数、エンジン温度の少なくとも1つを検出可能に構成されていることを特徴とする推進システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019126834A JP2021011202A (ja) | 2019-07-08 | 2019-07-08 | 推進システム |
| PCT/JP2020/026281 WO2021006223A1 (ja) | 2019-07-08 | 2020-07-03 | 推進システム |
| US17/623,763 US20220258845A1 (en) | 2019-07-08 | 2020-07-03 | Propulsion system |
| EP20837703.6A EP3998189A4 (en) | 2019-07-08 | 2020-07-03 | PROPULSION SYSTEM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019126834A JP2021011202A (ja) | 2019-07-08 | 2019-07-08 | 推進システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2021011202A true JP2021011202A (ja) | 2021-02-04 |
Family
ID=74114236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019126834A Pending JP2021011202A (ja) | 2019-07-08 | 2019-07-08 | 推進システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220258845A1 (ja) |
| EP (1) | EP3998189A4 (ja) |
| JP (1) | JP2021011202A (ja) |
| WO (1) | WO2021006223A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102415813B1 (ko) * | 2022-02-28 | 2022-07-01 | 주식회사 그람 | 선박용 하이브리드 전기추진시스템 |
| KR20230113961A (ko) * | 2022-01-24 | 2023-08-01 | 재단법인한국조선해양기자재연구원 | 전동기 직렬 배치형 선박 전기추진 시스템 |
| KR102679548B1 (ko) * | 2023-08-03 | 2024-07-01 | 한화시스템 주식회사 | 하이브리드 전기추진 방식 무인수상정 및 이의 제어방법 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4230517A1 (de) * | 2022-02-17 | 2023-08-23 | FSG-Nobiskrug Holding GmbH | Frachtschiff mit effizenzverbessertem mehrpropellerantrieb |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019069686A (ja) * | 2017-10-10 | 2019-05-09 | 東芝三菱電機産業システム株式会社 | ハイブリッド推進装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5107987B2 (ja) * | 2009-08-21 | 2012-12-26 | 新潟原動機株式会社 | 舶用推進装置 |
| JP2015071420A (ja) | 2014-12-04 | 2015-04-16 | ヤンマー株式会社 | 電気推進船の電気推進システム |
| US10974802B2 (en) * | 2016-01-20 | 2021-04-13 | Siemens Aktiengesellschaft | Vessel energy management system |
-
2019
- 2019-07-08 JP JP2019126834A patent/JP2021011202A/ja active Pending
-
2020
- 2020-07-03 EP EP20837703.6A patent/EP3998189A4/en not_active Withdrawn
- 2020-07-03 US US17/623,763 patent/US20220258845A1/en active Pending
- 2020-07-03 WO PCT/JP2020/026281 patent/WO2021006223A1/ja unknown
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019069686A (ja) * | 2017-10-10 | 2019-05-09 | 東芝三菱電機産業システム株式会社 | ハイブリッド推進装置 |
Non-Patent Citations (3)
| Title |
|---|
| BAS KWASIECKYJ, "HYBRID PROPULSION SYSTEMS - EFFICIENCY ANALYSIS AND DESIGN METHODOLOGY OF HYBRID PROPULSION SYSTEM, JPN6018017898, March 2013 (2013-03-01), NL, ISSN: 0005117565 * |
| STAPERSMA, DOUWE: "Main Propulsion Arrangement and Power Generation Concepts", ENCYCLOPEDIA OF MARITIME AND OFFSHORE ENGINEERING[ONLINE], JPN6019039402, 2017, ISSN: 0004976997 * |
| 水谷慎吾,飛鳥II機関部乗組員: "飛鳥II機関室/機関プラント紹介 -日本で建造された初めての電気推進客船の心臓部について", 日本マリンエンジニアリング学会誌, vol. 第47巻第2号, JPN6020035328, 1 March 2012 (2012-03-01), JP, pages 213 - 218, ISSN: 0005117566 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230113961A (ko) * | 2022-01-24 | 2023-08-01 | 재단법인한국조선해양기자재연구원 | 전동기 직렬 배치형 선박 전기추진 시스템 |
| KR102675929B1 (ko) * | 2022-01-24 | 2024-06-14 | 재단법인한국조선해양기자재연구원 | 전동기 직렬 배치형 선박 전기추진 시스템 |
| KR102415813B1 (ko) * | 2022-02-28 | 2022-07-01 | 주식회사 그람 | 선박용 하이브리드 전기추진시스템 |
| WO2023163319A1 (ko) * | 2022-02-28 | 2023-08-31 | 주식회사 그람 | 선박용 하이브리드 전기추진시스템 |
| KR102679548B1 (ko) * | 2023-08-03 | 2024-07-01 | 한화시스템 주식회사 | 하이브리드 전기추진 방식 무인수상정 및 이의 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3998189A4 (en) | 2023-08-02 |
| WO2021006223A1 (ja) | 2021-01-14 |
| US20220258845A1 (en) | 2022-08-18 |
| EP3998189A1 (en) | 2022-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021006223A1 (ja) | 推進システム | |
| US9533747B2 (en) | Systems and methods for controlling battery performance in hybrid marine propulsion systems | |
| EP2468624B1 (en) | Marine propulsion device | |
| CA2530949C (en) | Cargo handling apparatus of cargo handling industrial vehicle | |
| US8727820B2 (en) | Hybrid drive system for a ship | |
| US20120028516A1 (en) | Arrangement and method for improving load response in a marine vessel | |
| US8454402B1 (en) | Systems and methods for performing a shift in a transmission in marine propulsion systems | |
| US9054555B1 (en) | Methods and systems for charging a rechargeable battery device on a marine vessel | |
| US6645017B1 (en) | Marine powertrain and accessory power system with flywheel motor generator unit | |
| WO2020054217A1 (ja) | 船舶推進用ハイブリッドシステム | |
| KR20160144183A (ko) | 축계발전기와 축전지를 이용한 하이브리드 추진선박 | |
| JP2004359112A (ja) | 船舶推進装置及びその制御方法 | |
| KR20170126948A (ko) | 해양 선박을 위한 엔진실 배열 | |
| JP7221017B2 (ja) | 船舶用ハイブリッドシステム及び船舶用ハイブリッドシステムの制御方法 | |
| RU2392180C1 (ru) | Гребная электрическая установка (варианты) | |
| KR20190091881A (ko) | 엔진 pto 출력을 이용한 선박용 하이브리드 추진시스템 | |
| JP6088913B2 (ja) | 船舶非常航走システム | |
| US20220073179A1 (en) | Marine propulsion system and marine power supply system | |
| JPWO2017056186A1 (ja) | 船舶推進方法及び舶用推進装置 | |
| JP2019069686A (ja) | ハイブリッド推進装置 | |
| JP7060491B2 (ja) | 船舶用ハイブリッドシステム | |
| CN204210722U (zh) | 一种应用于小型船舶的动力推进装置及其系统 | |
| CN111017180A (zh) | 船舶混合推进方法及系统 | |
| JP2009126491A (ja) | ハイブリッド車両の制御装置 | |
| EP3868645B1 (en) | Marine propulsion system and control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230131 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230731 |