JP2019528140A - 神経系の完全性を監視するためのシステム - Google Patents
神経系の完全性を監視するためのシステム Download PDFInfo
- Publication number
- JP2019528140A JP2019528140A JP2019511903A JP2019511903A JP2019528140A JP 2019528140 A JP2019528140 A JP 2019528140A JP 2019511903 A JP2019511903 A JP 2019511903A JP 2019511903 A JP2019511903 A JP 2019511903A JP 2019528140 A JP2019528140 A JP 2019528140A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- nerve
- assembly
- contact
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/40—Detecting, measuring or recording for evaluating the nervous system
- A61B5/4029—Detecting, measuring or recording for evaluating the nervous system for evaluating the peripheral nervous systems
- A61B5/4041—Evaluating nerves condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/25—Bioelectric electrodes therefor
- A61B5/279—Bioelectric electrodes therefor specially adapted for particular uses
- A61B5/296—Bioelectric electrodes therefor specially adapted for particular uses for electromyography [EMG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
- A61B5/6877—Nerve
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
- A61N1/0556—Cuff electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2505/00—Evaluating, monitoring or diagnosing in the context of a particular type of medical care
- A61B2505/05—Surgical care
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Cardiology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Physiology (AREA)
- Electrotherapy Devices (AREA)
Abstract
Description
[0003]様々な咽喉処置、または、神経線維に近接および/もしくは隣接して行われる他の処置などの様々な処置の間、神経完全性または刺激の決定が選択されることがある。神経完全性を決定することは、神経に沿った刺激活動を確保または監視することを含み得る。これは、神経における誘起された信号の伝達または受信を含み得る。このような完全性の監視を実施するとき、電極または電極を含む要素が、神経線維を監視または刺激するために神経または神経線維に接続される。一回の、または、ある時間の期間にわたる、誘起された信号の監視は、神経の完全性を決定する助けとなることができる。様々な監視システムの中には、ミネソタ州ミネアポリスに事業所を持つMedtronic,Inc.によって販売されているNIM−Response(登録商標)3.0がある。この監視システムは、システムによって監視され得る神経の自動で周期的な刺激を可能にするAPS(登録商標)電極を含む電極を備えるかまたはその電極で動作させられ得る。
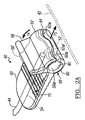
[0005]開示される選択された神経束または神経路に刺激を提供するためのシステムは、神経モジュールへの有線または無線の手法での接続された電極のための選択されたカフまたは選択装置を備える。さらに、無線刺激装置組立体が、神経を刺激するために、および/または、神経の刺激を検出するために、神経に隣接または近接して位置決めされ得る。電極は、神経束の少なくとも一部分に確実に接続または包囲する能動的な固定を備えてもよい。代替で、システムは、神経に接触し、包囲する組織の摩擦または圧縮によって所定位置で保持される接触電極を提供してもよい。
[0028]次いで、例示的な実施形態が添付の図面を参照してより完全に説明される。
[0029]最初に図1を参照すると、NIM(登録商標)神経完全性監視システムなどの監視システム16は、表示画面または表示装置22と1つまたは複数の入力装置とを有するモニタ組立体20を備え得る。監視システムは、2015年4月3日に出願された米国特許出願第14/678,485号および2015年4月3日に出願された米国特許出願第14/678,452号に開示されているものなどの監視システムを備えてもよく、それら両方の特許出願は参照により本明細書に組み込まれている。入力装置は、ツマミ24a、タッチスクリーン24b、キーボード24c、または他の適切な入力装置など、情報の指令を入力するための1つまたは複数のシステムまたは構造を備え得る。入力装置は、聴覚またはその他の触覚による入力装置を備えてもよい。
Claims (28)
- 電源、
作動構成要素、
記憶装置と処理装置とを備え、信号を設定するために前記作動構成要素によって作動させられるように構成された制御装置であって、前記処理装置は、前記作動構成要素で作動させられると、前記信号を設定するために前記記憶装置に記憶された命令を実行するように自動的に動作する、制御装置、および、
前記設定された信号に基づいて、選択された組織に電流を送るように構成された電極
を有する電子機器組立体と、
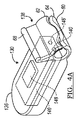
少なくとも前記電子機器組立体を内蔵するように構成された筐体と
を備える自己充足型刺激システム。 - 前記筐体から延び、前記電極に電気的に接続された細長い部材と、
前記電極に電気的に接続された前記細長い部材に形成された電極接点と
をさらに備える、請求項1に記載のシステム。 - 前記電極接点は、選択された幾何学的形状を前記細長い部材の末端に有する、請求項2に記載のシステム。
- 前記細長い部材は柔軟な回路であり、
電極接点は、平坦であり、前記柔軟な回路に形成される、請求項2または3に記載のシステム。 - 前記電極接点は複数の電極接点を備え、
各々の電極接点は、前記柔軟な回路において、前記複数の電極の互いの電極から絶縁されている、請求項2から4のいずれか一項に記載のシステム。 - 前記制御装置は、前記複数の電極の各々の電極を個別に電力供給と電力切断との間で切り替えるために前記命令を実行するようにさらに構成される、請求項5に記載のシステム。
- 前記筐体に形成された電極接点をさらに備え、
前記電極は神経に接触するように構成される、請求項1に記載のシステム。 - 前記電極接点は、前記筐体の軸の周りに実質的に360°にわたって接点を形成するように前記筐体の周りに延びる、請求項7に記載のシステム。
- 前記筐体は約16,000mm3の最大容積を有する、請求項1、7、または8のいずれか一項に記載のシステム。
- 前記電子機器組立体は、前記制御装置の作動の視覚的信号を提供するように構成された指示装置をさらに備える、請求項1から9のいずれか一項に記載のシステム。
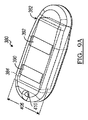
- 前記筐体と共に形成されたカフ部材をさらに備え、
前記カフ部材は、第2のカフ部分に対して移動可能な第1のカフ部分を備え、
前記第1のカフ部分は第1の縁を備え、前記第2のカフ部分は第2の縁を備え、
前記第1の縁と前記第2の縁とは、前記筐体の表面に対して約プラス20度から約マイナス20度までの角度に定められる平面において接する、請求項1に記載のシステム。 - 前記カフ部材によって少なくとも部分的に包囲された領域内へ延びる第1の電極接点をさらに備える、請求項11に記載のシステム。
- 筐体と、
前記筐体と共に形成されたカフ部材と
を備え、
前記カフ部材は、第2のカフ部分に対して移動可能な第1のカフ部分を備え、
前記第1のカフ部分は第1の縁を備え、前記第2のカフ部分は第2の縁を備え、
前記第1の縁と前記第2の縁とは、前記カフ部材が閉じられたときに前記第1の縁と前記第2の縁とが接する前記カフ部材を通って延びる平面に対して、約プラス5°〜約プラス20°から約マイナス5°〜約マイナス20°までの角度に定められる開放領域において接する、刺激システム。 - 信号を受信するように構成されたモニタと、
神経と接触して配置されるように構成された、前記カフ部材内の電極接点と、
信号を駆動する駆動部と、
前記信号を前記電極接点と前記神経とに送るために前記電極接点から前記駆動部まで延びるリード線と
をさらに備える、請求項13に記載のシステム。 - 前記第1の縁と前記第2の縁とは、前記第1の縁および前記第2の縁の全長に沿って実質的に完全な接触を可能にする相補的な波形状を有するように構成される、請求項13または14に記載のシステム。
- 電源、
作動構成要素、
信号を送信するために前記作動構成要素によって作動させられるように構成された制御装置、および、
前記信号を受信すると、選択された組織に電流を送るように構成された電極
を有する電子機器組立体をさらに備え、
前記筐体は、前記電子機器組立体を内蔵するように構成される、請求項13から15のいずれか一項に記載のシステム。 - 前記第1のカフ部分を移動させるために前記第1のカフ部分に接続されたカフレバーアームをさらに備える、請求項13から16のいずれか一項に記載のシステム。
- 前記カフ部材によって少なくとも部分的に包囲された領域内へ延びる電極接点をさらに備え、
前記電極接点は、前記制御装置によって生成された信号を送るように構成される、請求項13から17のいずれか一項に記載のシステム。 - 刺激装置システムを提供する方法であって、
電源と、作動構成要素と、信号を送信するために前記作動構成要素によって作動させられるように構成された制御装置と、前記信号を受信すると選択された組織に電流を送るように構成された電極とを有する電子機器組立体を形成するステップと、
前記電子機器組立体を筐体部分内に収容するステップと
を含む方法。 - 前記電子機器組立体を筐体部分内に収容するステップは、前記電子機器組立体の少なくとも一部分をオーバーモールドするステップを含む、請求項19に記載の方法。
- 前記電子機器組立体の少なくとも一部分をオーバーモールドするステップは、前記電極の少なくとも一部分を、前記筐体を通じて露出された状態に維持するステップを含む、請求項20に記載の方法。
- 前記電子機器組立体の少なくとも一部分をオーバーモールドするステップは、前記電子機器組立体をオーバーモールドした後に、前記電極への電気的接続を有するために電極接点を型の中に提供するステップを含む、請求項20に記載の方法。
- 神経を刺激するために、前記電子機器組立体を収容している前記筐体部分を被験者に対して配置するステップをさらに含む、請求項19から22のいずれか一項に記載の方法。
- 前記作動構成要素で前記電子機器パッケージを作動させるステップをさらに含む、請求項19から23のいずれか一項に記載の方法。
- 前記電子機器組立体を作動させる前記ステップによって前記電極に刺激信号を送信するように前記制御装置を操作するステップをさらに含む、請求項24に記載の方法。
- 前記電子機器組立体を作動させるステップは、前記作動構成要素を光エネルギーに曝すステップ、前記作動構成要素を導電媒質に曝すステップ、前記電極における抵抗を検出するステップ、前記作動構成要素を形成する機械スイッチを操作するステップ、前記作動構成要素に対して磁石を移動させるステップ、またはそれらの組み合わせのうちの少なくとも1つを含む、請求項24に記載の方法。
- 神経を刺激するために、前記電極と電気的に接続している電極接点を被験者に対して配置するステップをさらに含む、請求項19から26のいずれか一項に記載の方法。
- 電極接点を、前記筐体部分から延びる細長い部材に提供するステップをさらに含み、
前記電極接点は前記電極と電気的に接続している、請求項27に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/252,975 US9955882B2 (en) | 2016-08-31 | 2016-08-31 | System to monitor neural integrity |
| US15/252,975 | 2016-08-31 | ||
| PCT/US2017/049422 WO2018045056A1 (en) | 2016-08-31 | 2017-08-30 | System to monitor neural integrity |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019528140A true JP2019528140A (ja) | 2019-10-10 |
| JP2019528140A5 JP2019528140A5 (ja) | 2020-10-08 |
Family
ID=59846692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019511903A Pending JP2019528140A (ja) | 2016-08-31 | 2017-08-30 | 神経系の完全性を監視するためのシステム |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US9955882B2 (ja) |
| EP (1) | EP3506978B1 (ja) |
| JP (1) | JP2019528140A (ja) |
| KR (1) | KR20190049770A (ja) |
| CN (1) | CN109890454B (ja) |
| AU (1) | AU2017321607A1 (ja) |
| CA (1) | CA3035554A1 (ja) |
| ES (1) | ES2886068T3 (ja) |
| WO (1) | WO2018045056A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9955882B2 (en) | 2016-08-31 | 2018-05-01 | Medtronic Xomed, Inc. | System to monitor neural integrity |
| EP3691525A1 (en) | 2017-10-06 | 2020-08-12 | Medtronic Xomed, Inc. | Pledget stimulation and recording electrode assemblies |
| US10729342B2 (en) | 2018-02-28 | 2020-08-04 | Medtronic Xomed, Inc. | Nerve monitoring and/or stimulation electrode assemblies |
| WO2019204773A1 (en) | 2018-04-19 | 2019-10-24 | Iota Biosciences, Inc. | Implants using ultrasonic communication for neural sensing and stimulation |
| US11890474B2 (en) | 2018-04-19 | 2024-02-06 | Iota Biosciences, Inc. | Implants using ultrasonic communication for modulating splenic nerve activity |
| US11969596B2 (en) | 2018-08-29 | 2024-04-30 | Iota Biosciences, Inc. | Implantable closed-loop neuromodulation device, systems, and methods of use |
| WO2020249069A1 (zh) * | 2019-06-13 | 2020-12-17 | 上海交通大学医学院附属第九人民医院 | 听觉脑干植入体的电生理测试方法及其使用的记录电极 |
| WO2024081119A1 (en) * | 2022-10-11 | 2024-04-18 | The Johns Hopkins University | Photoacoustic imaging for intraoperative evaluation and treatment of peripheral nerve injuries |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080132983A1 (en) * | 2004-06-10 | 2008-06-05 | Biocontrol Medical, Ltd. | Electrode assembly for nerve control |
| US20100145221A1 (en) * | 2008-12-08 | 2010-06-10 | Brunnett William C | Nerve electrode |
| JP2014525288A (ja) * | 2011-08-23 | 2014-09-29 | カーディアック ペースメイカーズ, インコーポレイテッド | 迷走神経の捕捉を検出するシステムおよび方法 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6061596A (en) * | 1995-11-24 | 2000-05-09 | Advanced Bionics Corporation | Method for conditioning pelvic musculature using an implanted microstimulator |
| US6308105B1 (en) * | 1999-07-15 | 2001-10-23 | Medtronic Inc. | Medical electrical stimulation system using an electrode assembly having opposing semi-circular arms |
| US7214197B2 (en) | 2001-11-06 | 2007-05-08 | Prass Richard L | Intraoperative neurophysiological monitoring system |
| US7920915B2 (en) * | 2005-11-16 | 2011-04-05 | Boston Scientific Neuromodulation Corporation | Implantable stimulator |
| US20070073361A1 (en) * | 2005-09-23 | 2007-03-29 | Bioq, Inc. | Medical device for restoration of autonomic and immune functions impaired by neuropathy |
| US20080004673A1 (en) | 2006-04-03 | 2008-01-03 | Cvrx, Inc. | Implantable extravascular electrostimulation system having a resilient cuff |
| US9561053B2 (en) * | 2007-04-25 | 2017-02-07 | Medtronic, Inc. | Implant tool to facilitate medical device implantation |
| US10076655B2 (en) | 2007-09-21 | 2018-09-18 | Koninklijke Philips N.V. | Vestibular stimulation system |
| WO2009064773A1 (en) * | 2007-11-14 | 2009-05-22 | Cardiac Pacemakers, Inc. | Implantable creatinine sensor and related methods |
| US8483830B2 (en) * | 2008-04-04 | 2013-07-09 | Enteromedics Inc. | Methods and systems for glucose regulation |
| AU2009242500A1 (en) | 2008-05-02 | 2009-11-05 | Medtronic, Inc. | Self expanding electrode cuff |
| US9084551B2 (en) | 2008-12-08 | 2015-07-21 | Medtronic Xomed, Inc. | Method and system for monitoring a nerve |
| EP2440284B1 (en) * | 2009-06-09 | 2018-09-12 | Setpoint Medical Corporation | Nerve cuff with pocket for leadless stimulator |
| US9220885B2 (en) * | 2009-12-18 | 2015-12-29 | Ethicon, Inc. | Placement devices that enable patients to accurately position medical patches at target locations and methods therefor |
| US9320901B2 (en) | 2010-04-28 | 2016-04-26 | Medtronic, Inc. | Stimulation with utilization of non-selected electrode |
| US8934992B2 (en) * | 2011-09-01 | 2015-01-13 | Inspire Medical Systems, Inc. | Nerve cuff |
| US9186501B2 (en) * | 2012-06-13 | 2015-11-17 | Mainstay Medical Limited | Systems and methods for implanting electrode leads for use with implantable neuromuscular electrical stimulator |
| EP2903685B1 (en) | 2012-10-02 | 2019-08-07 | Cardiac Pacemakers, Inc. | Pinch to open cuff electrode |
| AU2014209228A1 (en) * | 2013-01-28 | 2015-08-13 | Reshape Lifesciences, Inc. | Energy efficient neuromodulation |
| US9630013B2 (en) | 2013-03-01 | 2017-04-25 | Empi, Inc. | Systems and methods for wireless control of noninvasive electrotherapy |
| US9333361B2 (en) * | 2013-10-31 | 2016-05-10 | Boston Scientific Neuromodulation Corporation | System and method to automatically incorporate lead information from medical image into programmable user interface |
| US10080887B2 (en) * | 2014-04-29 | 2018-09-25 | Cardiac Pacemakers, Inc. | Leadless cardiac pacing devices including tissue engagement verification |
| US20150328448A1 (en) * | 2014-05-13 | 2015-11-19 | Biotronik Ag | Electrode element for electromedical therapy in a human or animal body |
| US10674928B2 (en) * | 2014-07-17 | 2020-06-09 | Medtronic, Inc. | Leadless pacing system including sensing extension |
| US9918669B2 (en) | 2014-08-08 | 2018-03-20 | Medtronic Xomed, Inc. | Wireless nerve integrity monitoring systems and devices |
| WO2016112398A1 (en) | 2015-01-09 | 2016-07-14 | Axonics Modulation Technologies, Inc. | Patient remote and associated methods of use with a nerve stimulation system |
| US10039915B2 (en) | 2015-04-03 | 2018-08-07 | Medtronic Xomed, Inc. | System and method for omni-directional bipolar stimulation of nerve tissue of a patient via a surgical tool |
| US11980465B2 (en) | 2015-04-03 | 2024-05-14 | Medtronic Xomed, Inc. | System and method for omni-directional bipolar stimulation of nerve tissue of a patient via a bipolar stimulation probe |
| US10339273B2 (en) | 2015-11-18 | 2019-07-02 | Warsaw Orthopedic, Inc. | Systems and methods for pre-operative procedure determination and outcome predicting |
| US10445466B2 (en) | 2015-11-18 | 2019-10-15 | Warsaw Orthopedic, Inc. | Systems and methods for post-operative outcome monitoring |
| US9955882B2 (en) | 2016-08-31 | 2018-05-01 | Medtronic Xomed, Inc. | System to monitor neural integrity |
-
2016
- 2016-08-31 US US15/252,975 patent/US9955882B2/en active Active
-
2017
- 2017-08-30 JP JP2019511903A patent/JP2019528140A/ja active Pending
- 2017-08-30 KR KR1020197009094A patent/KR20190049770A/ko active IP Right Grant
- 2017-08-30 ES ES17764994T patent/ES2886068T3/es active Active
- 2017-08-30 AU AU2017321607A patent/AU2017321607A1/en not_active Abandoned
- 2017-08-30 EP EP17764994.4A patent/EP3506978B1/en active Active
- 2017-08-30 CA CA3035554A patent/CA3035554A1/en not_active Abandoned
- 2017-08-30 WO PCT/US2017/049422 patent/WO2018045056A1/en unknown
- 2017-08-30 CN CN201780065973.5A patent/CN109890454B/zh active Active
-
2018
- 2018-04-30 US US15/967,072 patent/US10729343B2/en active Active
-
2020
- 2020-07-23 US US16/936,679 patent/US20200345258A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080132983A1 (en) * | 2004-06-10 | 2008-06-05 | Biocontrol Medical, Ltd. | Electrode assembly for nerve control |
| US20100145221A1 (en) * | 2008-12-08 | 2010-06-10 | Brunnett William C | Nerve electrode |
| JP2014525288A (ja) * | 2011-08-23 | 2014-09-29 | カーディアック ペースメイカーズ, インコーポレイテッド | 迷走神経の捕捉を検出するシステムおよび方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3506978A1 (en) | 2019-07-10 |
| US20200345258A1 (en) | 2020-11-05 |
| EP3506978B1 (en) | 2021-08-04 |
| US20180055393A1 (en) | 2018-03-01 |
| CA3035554A1 (en) | 2018-03-08 |
| US9955882B2 (en) | 2018-05-01 |
| US10729343B2 (en) | 2020-08-04 |
| KR20190049770A (ko) | 2019-05-09 |
| US20180242866A1 (en) | 2018-08-30 |
| ES2886068T3 (es) | 2021-12-16 |
| WO2018045056A1 (en) | 2018-03-08 |
| AU2017321607A1 (en) | 2019-03-28 |
| CN109890454B (zh) | 2024-01-09 |
| CN109890454A (zh) | 2019-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019528140A (ja) | 神経系の完全性を監視するためのシステム | |
| JP5410297B2 (ja) | 術中刺激のシステム | |
| CN104203129B (zh) | 具有神经检测特征结构的外科器械 | |
| EP1698373B1 (en) | Systems and methods for intra-operative stimulation | |
| US20140073985A1 (en) | Stimulation device adapter | |
| JP2010515487A5 (ja) | ||
| KR20190049860A (ko) | 기기용 원격 제어 모듈 | |
| JP2017505169A (ja) | 自給式携帯式双極式皮質刺激器 | |
| CN105682593B (zh) | 刺激装置适配器 | |
| US11998337B2 (en) | Remote control module for instruments | |
| KR101886933B1 (ko) | 스마트 수술도구 | |
| JP2016054949A (ja) | 神経刺激装置 | |
| JP2007260418A (ja) | 手術装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190508 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210630 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210924 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220301 |