JP2019523656A - 組織位置特定装置及びその使用方法 - Google Patents
組織位置特定装置及びその使用方法 Download PDFInfo
- Publication number
- JP2019523656A JP2019523656A JP2018545596A JP2018545596A JP2019523656A JP 2019523656 A JP2019523656 A JP 2019523656A JP 2018545596 A JP2018545596 A JP 2018545596A JP 2018545596 A JP2018545596 A JP 2018545596A JP 2019523656 A JP2019523656 A JP 2019523656A
- Authority
- JP
- Japan
- Prior art keywords
- needle
- tissue
- pusher
- transport
- handle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3468—Trocars; Puncturing needles for implanting or removing devices, e.g. prostheses, implants, seeds, wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
- A61B2017/3409—Needle locating or guiding means using mechanical guide means including needle or instrument drives
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3904—Markers, e.g. radio-opaque or breast lesions markers specially adapted for marking specified tissue
- A61B2090/3908—Soft tissue, e.g. breast tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3925—Markers, e.g. radio-opaque or breast lesions markers ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3962—Markers, e.g. radio-opaque or breast lesions markers palpable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3987—Applicators for implanting markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3991—Markers, e.g. radio-opaque or breast lesions markers having specific anchoring means to fixate the marker to the tissue, e.g. hooks
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
組織位置特定装置と、組織位置特定装置を使用した組織特定方法とを開示する。組織位置特定装置は、輸送制御を備えたハンドルと、ハンドルから伸びる輸送ニードルと、輸送ニードル内の位置特定要素とを備え得る。位置特定要素は、輸送制御が第1の方向又は第2の方向に移動されるとき、輸送ニードルから展開されるか、又は輸送ニードル内に撤退させられ得る。位置特定要素は、可撓性トラッキングワイヤに連結され得る。
Description
関連出願の相互参照
本出願は、2016年4月14日出願の米国仮特許出願第62/322,729号と、2017年1月19日出願の米国仮特許出願第62/448,307号の利益を主張するものであり、その全体を参照としてここに援用する。
本出願は、2016年4月14日出願の米国仮特許出願第62/322,729号と、2017年1月19日出願の米国仮特許出願第62/448,307号の利益を主張するものであり、その全体を参照としてここに援用する。
本出願は、組織位置特定の分野全般に関連し、特に、疑わしい組織塊の標識又は境界付けを行う組織位置特定装置に関連する。
癌等の異常組織成長の可能性のある患者の診断及び治療において医師を支援する医療画像撮影等の技術において得られる効果にも関わらず、依然として後に外科的切除を行うために異常組織領域を物理的に特定する必要があることが多い。このアプローチが重大なツールとなる疾病の1つに乳癌がある。
乳癌の検出及び治療において、疑いのある組織塊を切除する必要があるかもしれないとき、切開生検又は摘出生検が妥当であることが多い。また組織塊が癌であるとき、乳房温存療法(BCT)の一部として、腫瘍摘出手術又は乳腺部分切除が実施されることもある。切除対象となる異常組織領域を物理的に特定するために採用されることの多い技術の1つは、ワイヤを用いた位置特定と称される。ワイヤを用いた位置特定には、放射線科医が、その遠位端に1つ以上のフックを含むワイヤをニードルを通じて患者の胸部に手動で挿入した後、ワイヤの端部が外科的切除を必要とする疑わしい組織内に入るか、又はこれに隣接するようにワイヤのフック領域を位置付ける必要があることが多い。ニードルが取り除かれてワイヤが組織内に残された後、患者は、通常数時間後に手術室に移され、疑わしい組織又は病変部、又は目標とされる組織又は病変部が執刀医によって除去される。
しかしながら、このようなワイヤは不正確に装着されることが多く、一旦装着されると移動してしまいがちであり、且つ一旦ニードルを出ると容易には調整できない。さらにワイヤが適正に装着されたとしても、執刀医は手術中にワイヤの先端を特定できないことが多く、この結果として、執刀医は切除される組織標本のキャンサーフリーマージンのチャンスを最適化するのに必要とされるより大きな組織部分を切除し得る。また疑わしい組織塊がワイヤの端部に見つけられなければ、執刀医は、病変を切除することなく、非発症組織の切断又は切除で終わらせてしまうことが多い。また装着後且つ外科手術前に、ワイヤは身体から固く突出し、当初区切られた特定された組織の領域から離間した位置に外れてしまうか、又はこの位置にずれが生じ得る。手術を待つ患者内に位置特定ワイヤがある間、ワイヤが不快になることもあり、患者が不快に感じることなく、又は外れるリスクを高めることなく、夜間に睡眠できるように十分に固定することができない。患者は、このようなずれや患者の不快感に伴うリスクがあるため、位置特定ワイヤを装着した同日に病変の外科的切除を進めなければならない。またワイヤの装着から最終的な外科的切除までの補給遅延が数時間を超えると、さらに不快感とずれのリスクを高めてしまう。
現在の位置特定ワイヤの他の欠点として、病変にニードル及びワイヤを通過させる必要があり、これは癌細胞の伝染に繋がるものであり、穿刺経路播種と呼ばれることもある。
従って外科的切除を予定された組織領域を区切るために患者に位置特定又は標識装置を正確且つ脱着可能に装着することのできるソリューションが必要である。このようなソリューションでは、切除対象の組織の境界を確実に規定できなければならず、数時間又は数日に亘って不注意によるずれのリスクを低減しなければならない。
組織位置特定装置及び組織位置特定装置を使用した組織位置特定方法を開示する。組織位置特定装置は、ニードル管腔を有する輸送ニードルと、ニードル管腔内でスライド可能に移動可能な位置特定要素と、ニードル管腔内のライナとを備え得る。位置特定要素は、輸送ニードルから取外し可能であり得る。ライナは、ニードル管腔に対してスライド可能に移動可能であり、径方向においてニードル管腔と位置特定要素の少なくとも一部との間に位置特定され得る。
位置特定要素は、音波発生表面処理を有することができる。音波発生表面処理は、表面粗さ、位置特定要素の表面に切り込まれたパターン、又はこれらの組み合わせであり得る。
組織位置特定装置は、スライド可能な輸送制御を備えたハンドルと、部分的にニードル管腔内に設けられたプッシャ要素とを備え得る。輸送ニードルは、ハンドルから伸び得る。
位置特定要素は、プッシャ要素によって取外し可能に保持され得る。位置特定要素は、スライド可能な輸送制御の第1の長手方向への移動に応じて、プッシャ要素から取外し可能とされ得る。位置特定要素は、プッシャ要素の遠位端がライナを超えて長手方向に移動されるとき、ライナから解放可能とされ得る。
スライド可能な輸送制御は、第1の界面と第2の界面とを有し得る。ハンドルは、近位端と遠位端とを有し得る。第1の界面は、近位端から遠位端を見たとき、上方に凹み、第2の界面は、遠位端から近位端を見たとき、上方に凹み得る。
ハンドルは、ハンドル背面側と、ハンドル背面側の反対のハンドル前面側とを有し得る。位置特定要素は、展開時、ハンドル背面側の方向に湾曲するように構成され得る。ハンドルは、ハンドル背面側に沿った長尺スロットを有し得る。スライド可能な輸送制御は、長尺スロットを通じて伸びるファスナを介して、プッシャ要素に連結され得る。
プッシャ要素は、プッシャ要素の遠位端において、輸送ポートを有するか、又は輸送ポートによって規定され得る。位置特定要素の少なくとも一部は、位置特定要素がニードル管腔内にあるとき、輸送ポート内において取外し可能に保持され得る。プッシャ要素は、プッシャ背面側と、プッシャ前面側と、プッシャ遠位端とを有し得る。プッシャ遠位端は、傾斜し、プッシャ前面側と鈍角を形成し得る。
組織位置特定装置は、ライナの近位端に連結されたばねを備え得る。ばねは、スライド可能な輸送制御の第1の長手方向への移動に応じて、プッシャ要素がライナに対して輸送ニードルの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成され得る。組織位置特定装置はまた、位置特定要素に連結されたトラッキングワイヤを有し得る。トラッキングワイヤの少なくともセグメントは、ループ状に巻き付けられるか、又は結び付けられるように構成され得る。
さらに組織位置特定装置は、ニードル管腔を有する輸送ニードルと、ニードル管腔内においてスライド可能に移動可能なプッシャ要素と、連動フレームワーク又は連動部を有する位置特定要素とを備え得る。プッシャ要素は、輸送ポートを有し得るか、又は輸送ポートによって規定され得る。連動フレームワークは、プッシャ要素の少なくとも一部がニードル管腔内にあるとき、輸送ポートと相互係止可能とされ得る。連動フレームワークは、輸送ポートがニードル管腔を出るとき、輸送ポートから解放可能とされ得る。
位置特定要素の連動フレームワークは、小穴フレームと、肩部とを備え得る。小穴フレームは、位置特定要素がニードル管腔内にあるとき、輸送ポート内に取外し可能に位置決めされ得る。
さらに組織位置特定装置は、スライド可能な輸送制御を備えたハンドルと、ハンドルから伸びる輸送ニードルとを備え得る。輸送ニードルは、ニードル管腔と、スライド可能に移動可能であり、且つ部分的にニードル管腔内に設けられたプッシャ要素とを有し得る。組織位置特定装置はまた、ニードル管腔内にあるとき、プッシャ要素によって取外し可能に保持される位置特定要素を備え得る。
プッシャ要素は、プッシャ背面側と、プッシャ前面側とを有し得る。ニードル管腔は、ニードル管腔の上方部分又は上半分を規定する管腔背面と、ニードル管腔の下方部分又は下半分を規定する管腔前面とを有し得る。プッシャ要素はまた、プッシャ近位端と、プッシャ近位端の反対のプッシャ遠位端とを有し得る。プッシャ遠位端は、傾斜して、プッシャ前面側と鈍角を形成し得る。プッシャ遠位端とプッシャ前面側によって形成された鈍角は、組織位置特定装置の横側から見たとき、視認され得る。プッシャ遠位端はまた、組織位置特定装置の横側から見たとき、プッシャ背面側と鋭角を形成し得る。
位置特定要素の少なくとも一部は、スライド可能な輸送制御の第1の長手方向への移動に応じて輸送ニードルを出るように構成され得る。位置特定要素は、スライド可能な輸送制御の第1の長手方向とは反対の第2の長手方向への移動に応じて、輸送ニードル内に撤退するように構成され得る。位置特定要素は、位置特定要素の少なくとも一部が輸送ニードルから展開された後、輸送ニードル内に撤退して戻り得る。
位置特定要素は、ニードル管腔内にあるとき、第1の構成に制限され得る。位置特定要素は、輸送ニードルからの展開時、第2の構成に変換し得る。第2の構成は、円形形状であり得る。第2の構成はまた、半円形状、三日月形状、鎌状形状、又は小鎌形状であり得る。位置特定要素は、1つの鋭利な要素先端を備えた要素遠位端を有し得る。位置特定要素はまた、少なくとも2つの鋭利な要素先端を有し得る。2つの鋭利な要素先端は、互いに離間する角度で、分岐するか、又は枝分かれし得る。2つの鋭利な要素先端は、二股に分かれるか、又は分岐し得る。位置特定要素は、音波発生表面処理を有し得る。音波発生表演処理は、表面粗さ、位置特定要素の表面に切り込んだパターン、又はこれらの組み合わせであり得る。
位置特定要素は、湾曲面を有し得る。位置特定要素全体は、実質的に湾曲面内にあり得る。他のバリエーションによると、位置特定要素の少なくとも一部は、湾曲面と並んで湾曲し、位置特定要素の他の部分は、湾曲面から外れて湾曲し得る。位置特定要素は、完全又は部分的な螺旋状に湾曲し得る。
組織位置特定装置はまた、プッシャ要素を部分的に収容するライナを有し得る。ライナは、プッシャ要素の一部とニードル管腔との間に位置決めされ得る。位置特定要素の一部は、プッシャ要素とライナとによって収容され得る。ライナは、金属材料、ポリエーテルエーテルケトン(PEEK)等のポリマ、又はこれらの組み合わせから作成することができる。ライナは、中空管とすることができる。他のバリエーションによると、ライナは、背部ライナと前部ライナとを有し得る。背部ライナは、プッシャ背面側と管腔背面との間に位置決めされ得る。前部ライナケーシングは、プッシャ前面側と管腔前面との間に位置決めされ得る。
組織位置特定装置は、ライナの近位端に連結されたばねを備え得る。ばねは、スライド可能な輸送制御の第1の長手方向への移動に応じて、プッシャ要素がライナに対して輸送ニードルの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成され得る。
組織位置特定装置はまた、位置特定要素に連結されたトラッキングワイヤを備え得る。トラッキングワイヤは、ポリマ外被の被覆されたステンレススチールワイヤであり得る。トラッキングワイヤは、ループ状に巻き付けられるか、又は結び付けられることのできる可撓性ワイヤであり得る。トラッキングワイヤの少なくとも一部は、ポリマ外被で被覆し得る。
輸送ニードルは、ニードル背面側と、ニードル背面側の反対のニードル前面側とを有し得る。輸送ニードルはまた、面取り遠位端を有し得る。位置特定要素は、面取り遠位端を出るか、又は面取り遠位端から展開されるように構成され得る。面取り遠位端は、ヒールと称することのできる領域において、面取り遠位端の近位縁に沿って丸められた縁部を有し得る。面取り遠位端はまた、ニードル先端に集まるか、又はニードル先端にて出会う2つの横方向の鋭利な縁部を有し得る。2つの横方向の鋭利な縁部は、丸められた縁部と連続するか、又は丸められた縁部から伸びるものとすることができる。
輸送ニードルは、ニードル背面側に沿って丸められた縁部の近位にニードルディンプルを有し得る。ニードルディンプルは、ディンプル長さとディンプル幅とを有し得る。ニードルディンプルは、略楕円形状のディンプルであり得る。ニードルディンプルは、ニードル管腔内に向かって径方向に延び、ディンプル長さに沿ったニードル管腔の部分を遮る凹部であり得る。
プッシャ要素は、輸送ポートを有し、位置特定要素は、輸送ポート内で取外し可能に支持され得る。輸送ポートは、プッシャ背面側に沿った切り出し部分とされ得る。位置特定要素は、プッシャ要素が位置特定要素を第1の長手方向に押圧するとき、輸送ニードルから展開され得る。位置特定要素は、輸送ポートの少なくとも一部が輸送制御によって輸送ニードルから移動されるとき、プッシャ要素及び輸送ニードルから自動的に取り外されるか、又は取り除かれるように構成され得る。位置特定要素は、位置特定要素の少なくとも一部が依然として輸送ポート内にあり、プッシャ要素が位置特定要素を第2の長手方向に引っ張るとき、輸送ニードル内に撤退して戻り得る。
輸送ポートは、遠位ポート側と、近位ポート側と、ポート基部とを有し得る。遠位ポート側は、組織位置特定装置の横側から見たとき、ポート基部と鋭角を形成し得る。
位置特定要素は、ロケータ近位端と、ロケータ近位端の反対のロケータ遠位端とを備え得る。ロケータ遠位端は、鋭利なロケータ先端を備え得る。ロケータ近位端は、開口を包囲する小穴フレームと、狭窄部と、肩部とを備え得る。小穴フレームは移動特定要素の動き又は移動が輸送制御によって制御されるとき、プッシャ要素の輸送ポート内で取外し可能に位置決めされ得る。位置特定要素は、プッシャ要素が位置特定要素の肩部を第1の長手方向に押圧するとき、輸送ニードルから展開され得る。位置特定要素は、小穴フレームの一部が依然として輸送ポート内にあり、プッシャ要素が小穴フレームの一方側、すなわち、小穴肩部を第2の長手方向に引き寄せるとき、輸送ニードル内に後退して戻り得る。
位置特定要素は、ブルーオキサイド仕上げで被覆され得る。ブルーオキサイド仕上げは、位置特定要素がニードル管腔を通じて移動され、ニードル管腔の内面と接触するとき、摩擦を低減し得る。
ハンドルは、ハンドル遠位端と、ハンドル遠位端の反対のハンドル近位端と、ハンドル背面側と、ハンドル背面側の反対のハンドル前面側と、ハンドル背面側に沿って規定された長尺スロットとを有し得る。ハンドルはまた、ハンドル管腔を有し得る。プッシャ要素の少なうとも一部は、ハンドル管腔内でスライド可能に移動し得る。輸送制御は、長尺スロットを通じて伸びるファスナを介して、プッシャ要素に連結され得る。いくつかのバリエーションによると、組織位置特定装置は、ギア機構を備え、プッシャ要素の移動は、ギア機構によって促進され得る。
輸送制御は、第1の界面と第2の界面とを備え得る。第1の界面は、近位端から遠位端を見たとき、上方に凹んでおり、第2の界面は、遠位端から近位端を見たとき、上方に凹んだものであり得る。位置特定要素は、第1の界面が第1の長手方向に押圧されるとき、第1の長手方向に移動され得る。位置特定要素は、輸送ニードルから展開されるとき、ハンドル背面側の方向に湾曲し得る。
トラッキングワイヤは、位置特定要素の長さに沿った種々の点で位置特定要素に連結され得る。トラッキングワイヤは、位置特定要素のロケータ近位端に連結され得る。トラッキングワイヤは、位置特定要素の小穴フレームに連結されるか、又は小穴フレームに結び付けられ得る。トラッキングワイヤは、開口を通じてねじ込まれ、小穴フレームに結び付けられ得る。トラッキングワイヤの少なくとも一部は、小穴フレームが輸送ポート内に位置決めされるとき、輸送ポート内に位置決めされ得る。トラッキングワイヤは、位置特定要素の長さに沿った中間点において、位置特定要素に連結され得る。
トラッキングワイヤは、ワイヤ遠位セグメントと、ワイヤ遠位セグメントの反対のワイヤ近位セグメントとを有し得る。ワイヤ遠位セグメントの少なくとも一部は、ワイヤに沿った取付部位において、ワイヤ遠位セグメントとワイヤ近位セグメントとの間で、ワイヤの他のセグメントの一部に固定され得る。ワイヤ遠位セグメントは、接着剤又はスポット溶接により、ワイヤの他のセグメントの一部に固定され得る。例えば、取付部位は、溶接部位であり得る。ワイヤ遠位セグメントと取付部位との間のワイヤのセグメントは、ループとして形成され得る。ポリマ外被をトラッキングワイヤの少なくとも一部に被覆又は塗布し得る。ポリマ外被はまた、取付部位に被覆又は塗布し得る。トラッキングワイヤは、ステンレススチールを含むか、又はステンレススチールからなるものであり得る。ポリマ外被は、熱収縮性ポリマとするか、又はトラッキングワイヤ周辺を包囲するチューブであり得る。
組織位置特定装置の使用方法も開示する。この方法は、組織位置特定装置の輸送ニードルのニードル管腔を通じて、第1の長手方向に、組織位置特定装置の位置特定要素を移動することを含み得る。この方法はまた、組織位置特定装置の位置特定要素を輸送ニードルから組織内に展開することと、位置特定要素の少なくとも一部を輸送ニードルから展開した後、ニードル管腔内に位置特定要素を撤退させることとを含み得る。この方法はさらに、輸送ニードルの先端を再度位置決めすることと、前記位置特定要素を輸送ニードルから組織内に再度展開することとを含み得る。
この方法はまた、位置特定要素を輸送ニードルから第1の湾曲面を有する湾曲構成内に展開することと、位置特定要素を輸送ニードルから第2の湾曲面を有する湾曲構成内に再度展開することとを備え得る。この方法はさらに、位置特定要素を輸送ニードルから展開するのに先立ち、スライド可能な輸送制御に連結されたプッシャ要素を部分的に収容するライナの近位端に連結されたばねを加圧することを備え得る。
この方法はまた、輸送ニードルのニードル先端を組織内の組織の目標組織部位からのオフセットに進行させることと、組織上で超音波トランスデューサを位置決めすることととを含み得る。この方法はさらに、組織位置特定装置のスライド可能な輸送制御を組織位置特定装置のハンドルに沿った第1の長手方向に押圧することにより、位置特定要素を輸送ニードルから展開することと、位置特定要素を移動させつつ、組織上で超音波トランスデューサを動かすこととを含み得る。
組織位置特定装置を使用した組織特定方法も開示する。この方法は、組織位置特定装置の輸送ニードルを目標組織部位に隣接して、又は目標組織部位に位置決めすることと、ユーザの片手を使用して、組織位置特定装置のハンドルを保持することとを含み得る。ニードル先端は、目標組織部位に隣接したオフセット位置に位置決めされ得る。オフセット位置は、位置特定要素の直径と目標組織部位の直径との差異未満、目標組織部位から離間し得る。
ユーザには、執刀医、放射線科医、又はその他の健康専門家を含み得る。この方法はまた、ユーザの同一の手の少なくとも1つの手指を使用して、組織位置特定装置のスライド可能な輸送制御を第1の長手方向に押圧することを含み得る。この方法は、スライド可能な輸送制御の押圧に応じて、輸送ニードルのニードル管腔を通じて、第1の長手方向に、組織位置特定装置の位置特定要素を移動させることを含み得る。
この方法は、輸送ニードルから目標組織部位に隣接して、又は目標組織部位に位置特定要素を展開することを含み得る。位置特定要素の少なくとも一部は、展開時、湾曲され得る。この方法はまた、位置特定要素を輸送ニードルから展開するのに先立って、プッシャ要素を部分的に収容するライナの近位端に連結されたばねを少なくとも部分的に加圧することを含み得る。
この方法はさらに、位置特定要素の少なくとも一部が輸送ニードルから展開された後、位置特定要素を輸送ニードル内に撤退させて戻すことを含み得る。位置特定要素を撤退させることは、ユーザの片手を使用して、組織位置特定装置のハンドルを保持することと、ユーザの同一の手の少なくとも1つの手指を使用して、第2の長手方向に、スライド可能な輸送制御を引っ張ることとを含み得る。第2の長手方向は、第1の長手方向の反対であり得る。
この方法はさらに、位置特定要素を輸送ニードルから湾曲面を有する湾曲構成内に展開することを含み得る。位置特定要素は、位置特定要素の湾曲面が疑わしい組織塊の少なくとも一部と交差するように、患者の組織内の疑わしい組織塊の少なくとも一部を径方向に包囲する。他のバリエーションによると、位置特定要素は、湾曲面が疑わしい組織塊のいずれの部分にも交差することがないように、疑わしい組織塊に隣接して、又は疑わしい組織塊の近位に展開され得る。
位置特定要素は、可撓性トラッキングワイヤに連結され得る。トラッキングワイヤの遠位端が患者の組織内に展開された位置特定要素に連結され得る際に、トラッキングワイヤの少なくともセグメントは、患者の組織から伸び得る。トラッキングワイヤの遠位端は、位置特定要素及びトラッキングワイヤが輸送ニードル及びプッシャ要素から展開されるとき、位置特定要素に対して、旋回又は回転し得る。トラッキングワイヤの遠位端は、展開された配列内に旋回又は回転し得る。展開された配列は、展開された位置特定要素によって形成された曲線に対する割線又は非接線である空間的位置決め又は配列であり得る。例えば、位置特定要素は、円形構成に展開され、トラッキングワイヤの遠位端は、円形構成に対して配列された割線又は非接線であり得る。
この方法はさらに、輸送ニードルの遠位先端を目標組織部位から離間して撤退させることを含み得る。輸送ニードルの遠位先端を撤退させることにより、位置特定要素に連結されたトラッキングワイヤを露出させ得る。
この方法はさらに、超音波トランスデューサを使用して、組織内の位置特定要素の位置を視認することを含み得る。この方法はまた、位置特定要素を展開しつつ、目標組織部位の近位の組織表面上で超音波トランスデューサを動かすことを含み得る。
この方法は、患者の体の外側に伸びるトラッキングワイヤのセグメントを周期的に引き寄せることにより、患者内の疑わしい組織塊の位置特定を行うことを含み得る。この方法はさらに、患者の体の外側に伸びるトラッキングワイヤのセグメントを引き寄せつつ、ユーザに少なくとも1本の手指で、目標組織部位上の外側組織層(例えば、真皮)を触診又は感じることを含み得る。この方法はさらに、引っ張られているトラッキングワイヤの発揮する張力と、ユーザの少なくとも一本の手指によって感じられる動きとに基づき、患者の組織内の疑わしい組織塊の位置特定を行うことを含み得る。
この方法はさらに、患者のトラッキングワイヤの組織から伸びるトラッキングワイヤのセグメントをループ状に巻き付けることと、前記患者の体の外側に伸びるトラッキングワイヤを前記患者の真皮又は患者の創傷被覆材に接着する(例えば、Tegaderm(登録商標)又はその他の生態的剛性接着剤又は創傷被覆材)か、さもなければ固定することとを含み得る。
他のバリエーションによると、組織位置特定装置は、回転可能な輸送制御を有するハンドルと、ハンドルから伸びる輸送ニードルと、輸送制御が第1の回転方向に回転されるとき、輸送ニードルから展開されるように構成される位置特定要素とを備え得る。位置特定要素は、輸送ニードル内にあるとき、第1の構成であり得る。位置特定要素は、輸送ニードルから展開されるとき、第2の構成に転換され得る。位置特定要素の一部は、輸送ニードル内で長手方向に移動するように構成されたプッシャ要素の遠位端によって取外し可能に保持され得る。組織位置特定装置はさらに、位置特定要素に連結されたトラッキングワイヤを備え得る。
位置特定要素は、回転可能な輸送制限が第2の回転方向に回転されるとき、輸送ニードル内に撤退され得る。回転可能な輸送制御は、ノブを備え得る。
ハンドルは、ハンドル背面側に沿って規定された配向アーチを備え得る。配向アーチは、曲率を有し、位置特定要素は、展開時、配向アーチの曲率に合致する方向に湾曲するように構成され得る。ハンドルは、ハンドル管腔を有し得る。組織位置特定装置は、ハンドル管腔内に駆動パイプを備え得る。駆動パイプは、回転可能な輸送制御の回転に応じて、ハンドル管腔内で回転するように構成され得る。駆動パイプは、カー要素を包囲するパイプ管腔を有し得る。
カー要素は、プッシャ要素に連結され得る。カー要素は、駆動パイプの回転に応じて、駆動パイプのパイプ管腔内で長手方向に移動するように構成可能である。
組織位置特定装置はさらに、音生成要素を備え得る。音生成要素は、位置特定要素の少なくとも一部が輸送ニードルから出るとき、又は輸送ニードルから展開されるとき、音を生じるように構成され得る。音生成要素は、ばねを備え得る。
組織位置特定装置はまた、触覚フィードバック生成要素を備え得る。触覚フィードバック生成要素は、位置特定要素が輸送ニードルを出るとき、又は輸送ニードルから展開されている時間の少なくとも一部において、触覚フィードバックを生成するように構成され得る。
他のバリエーションによると、組織位置特定装置を使用した組織特定方法は、組織位置特定装置の輸送ニードルを目標組織部位に隣接して、又は目標組織部位に位置決めすることを備える。この方法はまた、組織位置特定装置の回転可能な輸送制御を第1の回転方向に回転させることと、回転可能な輸送制御の回転に応じて、輸送ニードルのニードル管腔を通じて、第1の長手方向に、組織位置特定装置の位置特定要素を移動させることとを備え得る。位置特定要素を第1の長手方向に移動させることはさらに、組織位置特定装置の駆動パイプ内においてプッシャ要素を移動させることを含む。
この方法はさらに、回転可能な輸送制御の回転に応じて、位置特定要素を輸送ニードルから目標組織部位に隣接して、又は目標組織部位に展開することを備え得る。この方法はまた、輸送ニードルの遠位先端を目標組織部位から離間して撤退させること、輸送ニードルの遠位先端を撤退させつつ、位置特定要素に連結されたトラッキングワイヤを露出させることとを含み得る。
この方法はさらに、ユーザの片手を使用して、組織位置特定装置のハンドルを保持することと、ユーザの同一の手の少なくとも1本の手指を使用して、第1の回転方向に、回転可能な輸送制御を回転させることとを含み得る。
この方法はまた、位置特定要素の少なくとも一部が輸送ニードルから展開された後、位置特定要素を輸送ニードル内に撤退させることを含み得る。位置特定要素は、ユーザの片手を使用して組織位置特定装置のハンドルを保持し、ユーザの同一の手の少なくとも1本の手指を使用して、第2の回転方向に回転可能な輸送制御を回転させることにより、後退させ得る。
この方法はさらに、位置特定要素が輸送ニードルの遠位先端から部分的に展開されたとき、組織位置特定装置の触覚フィードバック生成要素を使用して触覚フィードバックを生成することを含み得る。この方法はまた、位置特定要素が輸送ニードルの遠位端部から部分的に展開されたとき、組織位置特定装置の音生成要素を使用して音を生成することを備え得る。
他のバリエーションによると、組織位置特定装置を使用した組織特定方法は、片手を使用して、組織位置特定装置の輸送ニードルのニードル先端を、組織の目標組織部位からのオフセットにて組織内に進行させることを備える。この方法はさらに、他の手を使用して、組織の組織表面上の目標組織部位の近位に超音波トランスデューサを位置決めすることを備え得る。この方法はまた、位置特定要素を輸送ニードルから組織内に展開することを含み得る。この方法はさらに、位置特定要素を展開しつつ、組織表面上で超音波トランスデューサを動かすことを含み得る。
組織位置特定システムもまた開示する。組織位置特定システムは、ユーザの片手のみによって支持されるように構成された組織位置特定装置と、位置特定要素を組織内に展開する際、ユーザの片手のみによって保持され、組織の表面上で動かされるように構成された超音波トランスデューサとを備え得る。組織位置特定装置は、スライド可能な輸送制御を備えたハンドルと、ハンドルから伸びる輸送ニードルと、スライド可能な輸送制御に連結されたプッシャ要素とを備え得る。組織位置特定システムの組織位置特定装置はまた、プッシャ要素によって取外し可能に保持された位置特定要素を備え得る。プッシャ要素は、スライド可能な輸送制御の移動に応じて、位置特定要素の少なくとも一部を輸送ニードルから組織内に展開するように構成され得る。
標識された目標組織部位の位置特定を実施するトラッキングワイヤもまた開示する。このトラッキングワイヤは、ワイヤ遠位セグメントを有するワイヤと、ワイヤ遠位セグメントの反対のワイヤ近位セグメントとを備え得る。ワイヤ遠位セグメントの少なくとも一部は、ワイヤに沿った取付部位において、ワイヤ遠位セグメントとワイヤ近位セグメントの間にワイヤの他のセグメントの一部に固定され得る。ワイヤ遠位セグメントと取付部位との間のワイヤのセグメントは、ループとして形成され得る。トラッキングワイヤはまた、ワイヤの少なくとも一部を被覆するポリマ外被を備え得る。取付部位は、ポリマ外被によって被覆され得る。
ワイヤは、ステンレススチールで作成され得る。トラッキングワイヤの少なくともセグメントは、患者の組織内に展開されるように構成され得る。ワイヤ遠位セグメントとワイヤ近位セグメントとの間のトラッキングワイヤの少なくともセグメントは、位置特定要素の一部の周囲でノット内に結び付けられるように構成され得る。
組織位置特定アセンブリの準備方法もまた開示する。この方法は、位置特定要素の開口を通じて、ワイヤのワイヤ遠位セグメントをねじ込むことを含み得る。この方法は、ワイヤに沿って取付部位において、ワイヤ遠位セグメントとワイヤ近位セグメントとの間のワイヤの他のセグメントに部分にワイヤ遠位セグメントの少なくとも一部を固定することを含み得る。ワイヤ遠位セグメントと取付部位との間のワイヤのセグメントは、ループを形成し得る。この方法はさらに、ワイヤの少なくとも一部をポリマ外被で被覆することを備え得る。
この方法はまた、取付部位をポリマ外被で被覆することを含み得る。この方法はさらに、ワイヤのセグメントを組織位置特定装置のプッシャ要素の管腔内に挿入されることを含み得る。この方法はまた、ワイヤに連結された位置特定要素の少なくとも一部をプッシャ要素の輸送ポート内に位置決めすることを含み得る。この方法はさらに、プッシャ要素を組織位置特定装置の輸送ニードルの管腔内にスライド可能に移動させることを含み得る。
図1A、図1B、及び図1Cは、組織位置特定装置100が輸送ニードル104に連結されたハンドル102を備え得ることを示す。ハンドル102は、ハンドルグリップ106と、ノブ部分108と、ハンドルノーズ110とを備え得る。ハンドルグリップ106は、執刀医、放射線科医、又はその他の撮像専門家等のユーザによって把持又は保持されるように構成されたハンドル102の一部であり得る。ハンドルグリップ106は、ユーザが片手でハンドル102を把持するようなサイズ又は形状を有し得る。ハンドルグリップ106は、円筒形、環状、ロッド上、又はこれらの組み合わせ等の形状を有し得る。他のバリエーションによると、ハンドルグリップ106は、長尺卵形、プリズム形、楕円体、円錐形、又はこれらの組み合わせの形状を有し得る。ハンドルグリップ106は、手指溝部、孔部、凹み、又はこれらの組み合わせを有し得る。
ハンドルグリップ106は、ノブ部分108に接続されるか、ノブ部分108と連続し得る。ノブ部分108は、組織位置特定装置100を制御するためにノブ112を収容するハンドル102の部分であり得る。ノブ部分108は、配向アーチ114を備え得る。配向アーチ114は、ハンドル102の表面から伸びる湾曲突起であり得る。配向アーチ114は、位置特定要素116の展開曲率をユーザに報知することにより、ユーザが組織位置特定装置100を適正に配向するように支援可能である。例えば、配向アーチ114は、展開時、位置特定要素116の曲率の方向及び/又は平面を示す半楕円又は弓型の曲率を有し得る。
ノブ112は、位置特定要素116の展開又は撤退を制御するためのバレル形状又は楕円体形状の構成要素であり得る。ノブ112は、ノブ部分108にてハンドル102に取り付けられる別体の構成要素であり得る。ノブ112は、配向アーチ114の近位に位置決め可能である。ノブ112は、長手方向の畝又は溝を有し得る。ノブ112の長手方向の畝又は溝により、ユーザは、ノブ112をより容易に回転させることができるようになる。ノブ112は、時計回り方向、反時計回り方向、又はこれらの組み合わせに回転され得る。ノブ112は、位置特定要素116が組織位置特定装置100から展開されるまで、自在に回転可能である。ユーザは、片手でハンドル102のハンドルグリップ106を保持し、同一の手の手指を使用して、ノブ112を回転させ、位置特定要素116の展開又は撤退を制御することができる。
ノブ部分108は、ハンドルノーズ110と接続されるか、又はこれに連続し得る。ハンドルノーズ110は、輸送ニードル104の一部に連結されるか、又は輸送ニードル104の一部を収容するハンドル102の一部であり得る。ハンドルノーズ110は、ノズル又はルアー端部118を備え得る。ルアー端部118は、包装ニードルカバーチューブ(図示せず)をハンドル102に強固に固定し得る。ルアー端部118は、十字型、円錐形、矩形、円錐台状、又はこれらの組み合わせであり得る。
ハンドル102、ノブ112、又はこれらの組み合わせは、射出成型ポリマ等のポリマで製造又は作成することができる。例えば、ハンドル102、ノブ112、又はこれらの組み合わせは、アクリロニトリルブタジエンスチレン(ABS)プラスチック、ポリカーボネート、ポリプロピレン(PP)、又はこれらの組み合わせからなるか、これを含み得る。ハンドル102はまた、ガラス充填ポリマ、金属、ステンレススチール等の金属合金、又はこれらの組み合わせから製造されるか、又はこれを含み得る。
ハンドル102は、100.0mm〜200.00mmの間の長手方向寸法を有し得る。例えば、ハンドル102は、約155.0mmの長手方向の寸法を有し得る。ハンドルグリップ106が円筒形状を有するとき、ハンドルグリップ106は、9.0mm〜13.0mmの間の直径を有し得る。例えば、ハンドルグリップ106は、約11.0mmの直径を有し得る。
輸送ニードル104は、ニードル先端120とニードル基部122とを備え得る。ニードル先端120は、患者の皮膚を穿刺し、位置特定要素116を展開するための輸送ニードル104の端部でなり得る。輸送ニードル104は、ニードル管腔を有し得る。ニードル管腔は、位置特定要素116、トラッキングワイヤ126、その内部、又はこれらの組み合わせを保管又は収容するため、輸送ニードル104内の中空キャビティであり得る。
ニードル先端120は、面取りされたか、又は偏向された先端又は先を有し得る。ニードル先端120は、ブレード、鋭利な縁部、又は切断縁部を備え得る。例えば、ニードル先端120は、皮下先端面取り部、中間先端面取り部、偏向先端隔膜、又はこれらの組み合わせを備え得る。ニードル先端120はまた、15度〜45度の面取り角度を有し得る。
ニードル基部122は、ルアー端部118、ハンドルノーズ110、その他の内側ハンドル構成要素、又はこれらの組み合わせによって部分的に収容又は固定され得る。輸送ニードル104は、ニードル先端120とニードル基部122との間に1つ以上の深さマーカ124を備え得る。深さマーカ124は、ニードル先端120とニードル基部122との間の輸送ニードル104の表面上への標識、エッチング、又は凹みであり得る。深さマーカ124は、執刀医、放射線科医、又はその他の撮像専門家等のユーザが、患者の組織部位内に輸送ニードル104を挿入するのを支援し得る。深さマーカ124は、数ミリメートル、数センチメートル、数インチ、又はこれらの組み合わせのインクリメントにより分離可能である。
輸送ニードル104は、金属、ステンレススチール等の合金、又は剛性医療用ポリマで作成可能である。輸送ニードル104は、0.5mm〜1.5mmの直径を有し得る。輸送ニードル104は、約1.0mmの直径を有し得る。
輸送ニードル104は、例えば、合成医療ポリマで作成されたとき、放射線不透過性の材料又はコーティングを含むか、又は放射線不透過性の材料又はコーティングが被覆され得る。放射線不透過性の材料又はコーティングは、金又は金コーティング、白金又は白金コーティング、タングステン又はタングステンコーティング、イリジウム又はイリジウムコーティング、タンタル又はタンタルコーティング、硫酸バリウム、ロジウム、又はこれらの組み合わせが含まれ得る。
輸送ニードルは、例えば、遠位先端等、ニードルの一部にサンドブラスト又はビードブラストを行うことによって生成され得るもの等、音波発生表面を有し、医療音波撮像中、そのニードル又は一部の可視性を向上することができる。
図1A及び図1Bは、位置特定要素116が展開時、湾曲するか、又はループ形状を有し得ることを示している。位置特定要素116は、金属、ポリマ、又はこれらの組み合わせの可撓性ワイヤ又は長尺物であり得る。位置特定要素116は、輸送ニードル104からの展開時、円弧状、曲線状、又はループ形状を採り得る。位置特定要素116は、組織を貫通し、予定されている切除及び/又は解析のために、組織塊の境界又は案内標識としての役割を果たす。
図1A及び図1Bは、組織位置特定装置100がトラッキングワイヤ126を備え得ることも示している。トラッキングワイヤ126は、位置特定要素116に連結又は接続され得る。トラッキングワイヤ126は、金属、ステンレススチール等の合金、医療用ポリマ、ポリマ外被を備えたステンレススチールケーブル、ポリマスレッド、ポリマチューブ、又はこれらの組み合わせで作成され得る。トラッキングワイヤ126は、例えば、撮像時のトラッキングワイヤ126の可視性を向上するため等、放射線不透過性材料を含むか、又は放射線不透過性材料が被覆され得る。
トラッキングワイヤ126は、輸送ニードル104、位置特定要素116、又はこれらの組み合わせの患者内への展開路又は挿入路を追跡するために使用され得る。トラッキングワイヤ126又はその一部は、位置特定要素116が展開されないか、又は完全には展開されないとき、ハンドル102内に収容され得る。トラッキングワイヤ126のセグメントもまた、位置特定要素116が展開されないか、又は完全には展開されないとき、ハンドル102の外部に配置され得る。例えば、トラッキングワイヤ126のセグメントは、位置特定要素116が展開されないか、又は完全には展開されないとき、ハンドルグリップ106の近位のハンドル102の端部から伸び得る。
図2Aは、位置特定要素116が輸送ニードル104からの展開時に展開軌道200を有し得る。展開軌道200は、略2次元平面に沿った略二次元又は平面の軌道を備え得る。例えば、展開軌道200は、組織位置特定装置100の長手軸を2等分する平面に沿って、略2次元の軌道を備え得る。他のバリエーションによると、展開軌道200は、3次元軌道を備え得る。
位置特定要素116は、その展開軌道200に従って所定形状202を達成し得る。所定形状202には、円形形状、楕円形状、スパイラル形状、又はこれらの組み合わせが含まれ得る。他のバリエーションによると、所定形状202には、三角形状、矩形状、台形状、又はこれらの組み合わせが含まれ得る。展開軌道200は、このような所定形状202を模倣するか、又はこれに従った軌道又は進路であり得る。例えば、位置特定要素116は、2次元円形の所定形状202を有し、位置特定要素116は、円形軌道で輸送ニードル104から現れ得る。
例えば、位置特定要素116は、10.0〜40.0mmの直径を有する円形又はループの所定形状202を有し得る。位置特定要素116は、約25.0mmの直径を有する円形又はループの所定形状202を有し得る。
図2Aは、ノブ112が第1の回転方向204に回されるとき、位置特定要素116が輸送ニードル104から展開され得ることを示している。第1の回転方向204は、組織位置特定装置100の長手軸に沿ってハンドルグリップ106からハンドルノーズ110を見たときの時計回り回転方向又は反時計回り回転方向を含み得る。
例えば、位置特定要素116は、ノブ112が第1の回転方向204に回されるとき、輸送ニードル104のニードル先端120から出るか、又はニードル先端120から現れ得る。位置特定要素116は、位置特定要素116の展開軌道200を表す逆ループ軌道においてニードル先端120から出るか、又はニードル120から現れ得る。逆ループ軌道は、輸送ニードル104のニードル基部122に向かって後方に湾曲している略円形の軌道であり得る。位置特定要素116は、ニードル基部122に向かって後方にループ化するのに先立ち、最初に上方に向かって、又は配向アーチ114の頂点又は頂上部に向かう方向に湾曲し得る。他のバリエーションによると、位置特定要素116は、ニードル基部122に向かって後方にループ化するのに先立ち、最初に下方に向かって、又は配向アーチ114の頂点又は頂上部から離間する方向に湾曲し得る。
図2Bは、ノブ112が第2の回転方向206に回されるとき、位置特定要素116が輸送ニードル104内に撤退し得ることを示している。第2の回転方向208は、第1の回転方向204とは異なる回転方向であり得る。第2の回転方向は、組織位置特定装置100の長手軸に沿ってハンドルグリップ106からハンドルノーズ110を見たときの反時計回り回転方向又は時計回り回転方向を含み得る。
位置特定要素116は、輸送ニードル104内に撤退して戻るときの撤退軌道208を有し得る。撤退軌道208は、展開軌道200の逆又は反対であり得る。例えば、展開軌道200が図2Aに示される通りの上方に湾曲したループ軌道であるとき、撤退軌道208は、図2Bに示される通りの下方に湾曲したループ軌道である。撤退軌道208は、略2次元の軌道、3次元の軌道、又はこれらの組み合わせであり得る。
位置特定要素116は、ノブ112が第2の回転方向208に回されるとき、輸送ニードル104のニードル先端120内に向かって再度入るか、又は撤退して戻り得る。位置特定要素116は、位置特定要素116の展開軌道200を逆にするか、又は撤退させることにより、ニードル先端120内に再度入るか、又は撤退させ得る。
図2Cは、位置特定要素116が所定形状202を表す円形形状であり得ることを示す。位置特定要素116は、形状記憶技術、加熱技術、屈曲技術、又はこれらの組み合わせを使用することにより、所定形状202を有し得る。位置特定要素116は、ばねスチール、Nitinol(登録商標)等のニッケル−チタン合金、形状記憶ポリマ、ステンレススチール、又はこれらの組み合わせ等からなるか、又はこれらから製造し得る。
位置特定要素116は、放射線不透過性の材料又はコーティングを含むか、又は放射線不透過性の材料又はコーティングが被覆され得る。放射線不透過性の材料又はコーティングは、金又は金コーティング、白金又は白金コーティング、タングステン又はタングステンコーティング、イリジウム又はイリジウムコーティング、タンタル又はタンタルコーティング、硫酸バリウム、ロジウム、疎水性及びその他の潤滑コーティング、又はこれらの組み合わせを含み得る。
図3Aは、組織位置特定装置100がプッシャ要素又はプッシャ要素300を備え得ることを示している。プッシャ要素300は、位置特定要素116を展開するために、組織位置特定装置100によって使用され得る。プッシャ要素300は、位置特定要素116が輸送ニードル104内にあるとき、輸送ニードル104内に位置決めされ得る。プッシャ要素300は、輸送ニードル104内で長手方向にスライド可能に動き得る。プッシャ要素300は、ユーザがノブ112を第1の回転方向204又は第2の回転方向208に各々回すとき、輸送ニードル104を通じて長手方向前方又は長手方向後方に進行させ得る。プッシャ要素300は、ポリマ、ステンレススチール、又はこれらの組み合わせからなるか、又はこれらから製造され得る。
プッシャ要素300は、プッシャ先端302を備え得る。プッシャ先端302は、位置特定要素116に脱着可能に取り付けられたプッシャ要素300の一部であり得る。プッシャ先端302は、ウィンドウ304を有し得る。ウィンドウ304は、プッシャ先端302に沿った部分開口又は切り出し部分であり得る。
位置特定要素116は、要素基部308及び要素先端306を備え得る。要素基部308は、プッシャ要素300に脱着可能に取り付けられるように構成された位置特定要素116の一部であり得る。要素先端306は、要素基部308の遠位の位置特定要素116の端部であり得る。要素先端306は、患者組織を穿刺又は切断するように構成され得る。要素先端306は、面取り縁部、鋭利な縁部、尖った先端、又はこれらの組み合わせを有し得る。
図3Bは、位置特定要素116の要素基部308が小穴フレーム310と、狭窄部312と、肩部314とを備え得ることを示している。小穴フレーム310は、狭窄部312によって肩部314に接続され得る。小穴フレーム310は、小穴316を有し得る。小穴316は、トラッキングワイヤ126を受容するように構成された開口又は孔部であり得る。トラッキングワイヤ126は、小穴316にねじ込まれ、ねじ込まれた端部は、例えば、圧着スリーブ、結び、結び目、接着剤、コイル、熱収縮ポリマ外被、又はこれらの組み合わせを使用して、トラッキングワイヤ126の残りの部分に、フェルールを介して圧着することにより接続されるか、又は結び付けられ得る。
小穴フレーム310は、プッシャ要素300のウィンドウ304内に篏合することにより、プッシャ要素300が位置特定要素116に係合するようにし得る。ウィンドウ304の遠位のプッシャ要素300の一部は、小穴フレーム310がウィンドウ304内にあるとき、要素基部308の狭窄部312を部分的に包囲し得る。
図3Bは、位置特定要素116の肩部314を押圧することにより、輸送ニードル104から位置特定要素116を進行させ得ることを示している。プッシャ要素300はまた、小穴フレーム310を引き寄せることにより、位置特定要素116を輸送ニードル104内に撤退させるか、又は引き込み得る。プッシャ要素300は、小穴フレーム310、狭窄部312、又はこれらの組み合わせがプッシャ要素300のプッシャ先端302から係合解除されない限り、位置特定要素116を輸送ニードル104内に撤退して戻すことができる。小穴フレーム310は、小穴フレーム310がプッシャ要素300のウィンドウ304から変位されるとき、プッシャ先端302から係合解除され得る。狭窄部312は、狭窄部312及び小穴フレーム310がもはやプッシャ要素300の遠位部分によって包囲されないとき、プッシャ先端302から係合解除され得る。位置特定要素が組織内にあるとき、狭窄部312と小穴フレーム310とが一旦もはやプッシャ要素300から制約されない状況になると、位置到底要素の形状記憶により、位置特定要素の近位部分にプッシャ先端302から離間して引っ張らせる。
図3C〜図3Fは、プッシャ要素300のプッシャ先端302が要素基部308ともはや係合しなくなるときに位置特定要素116が展開され得ることを示している。図3C及び図3Dはまた、一旦位置特定要素116が展開されると、トラッキングワイヤ126がプッシャ要素300、輸送ニードル104、又はこれらの組み合わせを通じて引っ張られ得ることを示している。トラッキングワイヤ126は、位置特定要素116が展開された後、ユーザが輸送ニードル104を患者から撤退させるとき、プッシャ要素300、輸送ニードル104、又はこれらの組み合わせを通じて引っ張られ得る。一旦ユーザが輸送ニードル104を患者から完全に撤退させると、トラッキングワイヤ126の全長がハンドル102、輸送ニードル104、プッシャ要素300、又はこれらの組み合わせを通じて引っ張られ得る。
図4Aは、組織位置特定装置100がノブ112によって制御され得ることを示している。ユーザは、ノブ112を第1の回転方向204に回転させて、ニードル先端120に向かって、又は輸送ニードル104から位置特定要116を進行させ得る。ユーザはまた、ノブ112を第2の回転方向208に回転させて、位置特定要素116をニードル先端120内に撤退させて戻すか、又はさらに輸送ニードル104内に戻し得る。位置特定要素116は、プッシャ要素300のプッシャ先端302が位置特定要素116の要素基部308を押すか、又は引っ張るとき、前進又は撤退させられ得る。
図4Bは、組織位置特定装置100がハンドル102内に位置決めされた駆動パイプ400を有し得ることを示している。駆動パイプ400は、ハンドルグリップ106からハンドルノーズ110まで伸び得る。駆動パイプ400は、ハンドルグリップ106内で回転し得る。ノブ部分108に沿った駆動パイプ400の一部は、内側バレル402に包囲されるか、又は内側バレル402に規定され得る。内側バレル402は、ノブ112と相互作用することにより、ノブ112に駆動パイプ400を回転させるように構成され得る。
例えば、ユーザは、ノブ112を第1の回転方向204に回転させることにより、駆動パイプ400を同一の第1の回転方向204に回転させ得る。また例えば、ユーザは、ノブ112を第2の回転方向208に回転させることにより、駆動パイプ400を同一の第2の回転方向208に回転させ得る。
駆動パイプ400は、射出成型ポリマ等のポリマから製造されるか、又は作成され得る。例えば、駆動パイプ400は、アクリロニトリルブタジエンスチレン(ABS)プラスチック、ポリカーボネート、ポリプロピレン(PP)、又はこれらの組み合わせからなるか、又はこれらを含み得る。駆動パイプ400は、金属又はステンレススチール等の合金から製造されるか、又はこれらから製造された部品を含み得る。
図5Aは、駆動パイプ400がパイプ管腔500を有し得ることを示している。パイプ管腔500は、駆動パイプ400の内側又は内面であり得る。図5Aはまた、組織位置特定装置100がパイプ管腔500内にあるカー502を有し得ることを示している。カー502は、プッシャ要素300を操作する(例えば、押したり引っ張ったりする)ように構成された組織位置特定装置100の構成要素であり得る。カー502は、僅かな高さ寸法を有した楕円柱の形状を有し得る。例えば、カー502は、1.0mm〜4.5mmの間の高さ寸法を有する楕円柱の形状を有し得る。他のバリエーションによると、カー502は、扁平な矩形、小判状、円盤状、又はこれらの組み合わせの形状であり得る。
カー502は、カートラック510内に設けられ得る。カートラック510は、カー502がハンドルの中央長手軸に沿ってスライドする際にカー502を支持する面又は壁部を有する長尺経路セグメントであり得る。カートラック510は、ロッド又はシャフトの長手方向長さに沿った凹部又は凹みを有するロッド又はシャフトの一部であり得る。カー502又はその一部は、カートラック510の凹部又は凹み内に篏合し得る。カートラック510は、輸送ニードル104に連結され得る。他のバリエーションによると、カートラック510は、輸送ニードル104から分離され得る。カートラック510は、パイプ管腔500内にあるか、又はパイプ管腔500内に配され得る。カートラック510は、駆動パイプ400が回転する際、静止したままであり得る。
プッシャ要素300は、カー502に取り付けられ得る。プッシャ要素300は、接着剤、締り嵌め、ねじ、又はこれらの組み合わせを介してカー502に強固に取り付けられ得る。プッシャ要素300は、カー502の本体にねじ込まれるか、又は成形されることにより、カー502に取り付けられ得る。プッシャ要素300は、カー前方部分504に取り付けられ得る。カー前方部分504は、ハンドルノーズ110の近位のカー502の端部又はセグメントであり得る。プッシャ要素300は、カー前方部分504に取り付けられるか、カー前方部分504に連続するか、又はカー前方部分504から伸び得る。
カー502は、カートゥース506を備え得る。カートゥース506は、カー502から伸びる突出部又は突起であり得る。カートゥース506は、組織位置特定装置100の長手軸に直交する方向で垂直に伸び得る。カートゥース506はまた、配向アーチ114の頂点又は頂上部の方向に伸び得る。カートゥース506は、立方体又は台形の形状を有し得る。カートゥース506は、丸められた又は面取りされた縁部又は隅部を有し得る。他のバリエーションによると、カートゥース506は、卵型、半球、円錐、円錐台、又はこれらの組み合わせであり得る。
図5A及び図5Bは、パイプ管腔500がパイプ管腔の表面から駆動パイプ400の内面内に向かって径方向内側に伸びるスパイラル進路を備え得ることを示している。スパイラル進路間の固体材料は、例えば、領域508として示される。
ノブが1つの回転方向に回される際、スパイラル進路にカーを進行させることにより、プッシャチューブを進行させ、位置特定要素116を輸送ニードル104内から進行させる。ノブが反対の回転方向に手動で回されるとき、このプロセスは逆となり、位置特定要素116を輸送ニードル104内から撤退させる。
図5Cは、カー502がハンドル102のハンドルノーズ110部分にてパイプ管腔500の端部に到達するまで、カー502が駆動パイプ400によって推進され得ることを示している。カー502は、カートゥース506が端部ギア514に引き渡されるとき、停止し得る。端部ギア514は、ノズル端部118に最も近い突出ギア508であり得る。端部ギア514は、パイプ管腔500の端部の前の、パイプ管腔500内の最終突出ギア508であり得る。
カー502は、カー前方部分がカーストップ512と接触するか、又はカーストップ512に対して押圧されるとき、停止するか、又は動かないようにされ得る。カーストップ512は、ルアー端部118の近位のパイプ管腔500の端部において、静的隆起縁部又は突出面特徴部であり得る。他のバリエーションによると、カーストップ512は、ノズル端部118に連結された組織位置特定装置100の別体の静的構成要素であり得る。
駆動パイプ400、ノブ112、又はこれらの組み合わせは、カー502がカーストップ512に到達するとき、第1の回転方向204にさらに回転しないようにされ得る。駆動パイプ400、ノブ112、又はこれらの組み合わせは、端部ギア514が停止されたカー502のカートゥース506に対して押圧されたとき、第1の回転方向204に回転しないようにされ得る。停止されたカー502のカートゥース506は、端部ギア514のさらなる角度回転を阻止することができる。
駆動パイプ400は、第2の回転方向208に回転されて、カーストップ512から離間して、パイプ管腔500の反対の端部に向かってカー502を押圧し得る。駆動パイプ400が第2の回転方向208に回転されるとき、端部ギア514はまた、第2の回転方向208に回転し、ハンドルグリップ106の方向においてカートゥース506に力を付与し得る。
図6A及び図6Bは、組織位置特定装置100が触覚フィードバック又は音生成アラート等、回転アラート600を備え得ることを示している。回転アラート600は、組織位置特定装置100のユーザに対する、位置特定要素116が展開及び取外しされる段階にあり、もはや瞬時に撤退可能でないことを示す可聴及び/又は触覚の信号又は指示を生成するように構成され得る。この信号又は指示は、触覚クリック又は振動、可聴クリックノイズ、タッピングの感覚及び/又はノイズ、摩擦の感覚及び/又はノイズ、回転抵抗の上昇、キーキー音の発生、こすりつけ、引っかき、又はこれらの組み合わせを含み得る。回転アラート600は、カー前方部分504から突出したロッド、ピン、フック、ばね、又はこれらの組み合わせを含み得る。
駆動パイプ400は、溝部602を備え得る。溝部602は、パイプ管腔500の周辺に長手溝604を有する駆動パイプ400の一部であり得る。回転アラート600は、長手溝604と相互作用して、可聴及び/又は触覚の信号を生成し得る。回転アラート600は、カー502が溝部602に入るとき、長手溝604と相互作用し得る。溝部602は、カーストップ512の近傍にあり得る。回転アラート600は、パイプ管腔500が第1の回転方向204、第2の回転方向208、又はこれらの組み合わせに回転する際、長手溝604と相互作用し得る。パイプ管腔500は、第1の回転方向204、第2の回転方向208、又はこれらの生み合わせに長手溝604を回転させ得る。回転アラート600は、長手溝604に対してタップ又はドラッグを行うことにより、検出可能な可聴及び/又は触覚の信号を生成することができる。
回転アラート600は、カー502が輸送ニードル104からプッシャ要素300のプッシャ先端302を押圧した旨をユーザに報知する可聴及び/又は触覚の信号を生成し得る。可聴及び/又は触覚の信号はまた、位置特定要素116の要素基部308がプッシャ要素300のプッシャ先端302から直ちに外れ得ること、又は分離され得ることを示し得る。
溝部602は、ハンドル102のハンドルノーズ110における駆動パイプ400の一部であり得る。回転アラート600は、カーがカーストップ512に到達するまで、可聴及び/又は触覚の信号を生成し得る。
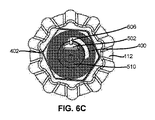
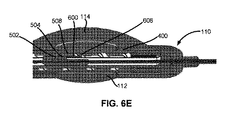
図6C、図6D、及び図6Eは、回転アラート600が回転アラート先端606を有し得ることを示している。回転アラート先端606は、カー前方部分504の遠位の回転アラート600の端部であり得る。回転アラート先端606は、回転アラート600の本体を表す長尺ロッドの湾曲したか、又は巻き付けられた先端であり得る。図6C、図6D、及び図6Eは、カー502がパイプ管腔500を通じてハンドルノーズ110に向かって押圧される際、気付かれるようないずれの可聴及び/又は聴覚のアラート信号又はノイズも生じることなく、回転アラート600、回転アラート先端606、又はこれらの組み合わせがパイプ管腔500を下り得る。
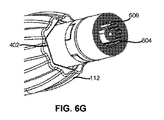
図6F、図6G、及び図6Hは、回転アラート600が駆動パイプ400の溝部602に入るとき、回転アラート先端606が長手溝604内に位置決めされ得ることを示している。溝部602は、長手溝604によって分離された長手畝608を有し得る。長手畝608は、パイプ管腔500の中央に向かって径方向内側に突出し得る。
回転アラート600は、回転アラート先端606が溝部602内にあるとき、駆動パイプ400が第1の回転方向204又は第2の回転方向208のいずれかに回転されるとき、回転アラート600は可聴及び/又は触覚の信号又はフィードバックを生成し得る。回転アラート600は、駆動パイプ400が回転される際、回転アラート先端606が長手畝608、長手溝604、又はこれらの組み合わせに接触する際、可聴及び/又は触覚の信号又はフィードバックを生成し得る。
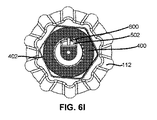
図6I、図6J、及び図6Kは、駆動パイプ400が第1の回転方向204又は第2の回転方向208のいずれかに回転されるとき、回転アラート先端606が長手畝608によって偏らされ得ることを示している。回転アラート先端606は、回転アラート600が長手畝608によって径方向内側に押圧されるとき、偏らされ得る。例えば、回転アラート600が回転アラート先端606を表す湾曲端部又はかぎ状端部を有するロッドであるとき、この湾曲端部又はかぎ状端部は、駆動パイプ400がノブ112によって回転される際、長手畝608によって偏らされ得る。本例において、ロッド及び湾曲端部又はかぎ状端部は、湾曲端部又はかぎ状端部が長手畝608によって偏らされるとき、径方向内側に押圧され得る。
図7は、組織位置特定装置100が組立状態にあるとき、駆動パイプ400がハンドル102内に位置決めされ得ることを示している。カートラック510は、輸送ニードル104に連結され、カートラック510と輸送ニードル104との双方は、組織位置特定装置100が組立状態にあるとき、駆動パイプ400内に位置決められ得る。カー502は、プッシャ要素300に対して強固に取り付けられ得る。プッシャ要素300は、組織位置特定装置100が組立状態にあるとき、輸送ニードル104を通じてねじ込まれ、輸送ニードル104内に位置決められ得る。位置特定要素116は、トラッキングワイヤ126に連結され得る。トラッキングワイヤ126は、プッシャ要素300が輸送ニードル104内に挿入されるのに先立って、プッシャ要素300にねじ込まれ得る。位置特定要素116は、プッシャ要素300のプッシャ先端302に脱着可能に取り付けられ得る。位置特定要素116はまた、輸送ニードル104内に挿入される真っ直ぐな構成内に圧入され得る。
図8Aは、位置特定要素116が、患者組織モデル内に展開されるとき、例えば目標組織塊を有するか、又は目標組織塊である目標組織700を包囲し得ることを示している。位置特定要素116は、プッシャ要素300及びカー502がパイプ管腔500を通じて長手方向に押圧される際、胸部組織又は肺組織等、患者の組織を切断し得る。位置特定要素116は、目標組織700を包囲及び標識するために所定形状202に湾曲し得る。所定形状202は、円形形状であり得る。位置特定要素116は、位置特定要素116の小穴フレーム310がプッシャ要素300のウィンドウ304から外れるか、さもなければウィンドウ304から分離されるとき、組織位置特定装置100から展開され得る。また位置特定要素116は、位置特定要素の狭窄部312、肩部314、又はこれらの組み合わせがプッシャ要素300のプッシャ先端302から分離されるとき、展開され得る。
ユーザは、輸送ニードル104、プッシャ要素300、又はこれらの組み合わせを患者の組織部位から完全に撤退させることにより、位置特定要素116の展開を完了させることができる。位置特定要素116は、位置特定要素116が組織位置特定装置100の残りの部分から分離される際、患者の組織の移植部位に支えられるようになる。
図8Bは、位置特定要素116に連結されたトラッキングワイヤ126の端部が輸送ニードル104の組織部位からの除去に先立って、患者の組織内に残され得る。トラッキングワイヤ126は、輸送ニードル104によって患者の付属器官内に設けられた進路を執刀医に報知するための進路又は軌跡としての役割を果たし得る。トラッキングワイヤ126はまた、湾曲した位置特定要素116によって描かれる目標組織領域の位置を示すための進路又は軌跡としての役割を果たし得る。
図8Cは、輸送ニードルが除去された後、位置特定要素116に取り付けられないか、又は連結されないトラッキングワイヤ126の端部が患者の肌から外れ得ることを示している。ワイヤが126が可撓性であり、ワイヤが(巻き付けの有無を問わず)患者の肌に快適に載せられ、例えば粘着性創傷被覆材によって患者の肌に固定され得るために、トラッキングワイヤ126のこの露出されたセグメントは、患者から伸ばされ得る。例えば、トラッキングワイヤ126の露出されたセグメントは、患者の付属器官に手術用テープによって貼付され得る。トラッキングワイヤ126の露出されたセグメントはまた、患者の肌又は創傷被覆材に貼付された前後に、巻き付けられるか、折り畳まれるか、ねじられるか、又は切断され得る。トラッキングワイヤ126の可撓性の性質は、位置特定要素がはずれるリスクを最小化して位置特定要素がin situで維持される際、患者を快適にさせる。この特徴は、位置特定された組織の外科的切除の計画に際して補給の柔軟性を与える(例えば、位置特定要素を1日装着し、翌日組織標本と位置特定要素を除去する等)。
図面には示されていないが、本開示により、多数の位置特定要素116を使用して3次元で疑わしい組織塊を標識又は包囲できることが予想される。
図9は、スライド可能な輸送制御904を備えたハンドル902と、ハンドル902から伸びる輸送ニードル906とを有し得る。ハンドル902は、円筒、チューブ、ロッド、長尺卵型、楕円体、円錐、又はこれらの組み合わせの形状を有し得る。ハンドル902は、手指溝部、孔部、凹み、又はこれらの組み合わせを備える。ハンドル902は、ユーザが片手でハンドル902を把持できるようなサイズ又は形状を有し得る。ハンドル902は、アクリロニトリルブタジエンスチレン(ABS)プラスチック、ポリカーボネート、ポリプロピレン(PP)、又はその他の好適なポリマ、又はこれらの組み合わせを含むか、又はこれらからなり得る。ハンドル902はまた、金属又はステンレススチール等の合金で製造された構成要素を備え得る。
ハンドル902は、ハンドル遠位端908、ハンドル遠位端908の反対のハンドル近位端910、ハンドル背面側912、ハンドル背面側912の反対のハンドル前面側914、及びハンドル背面側912に沿って規定された長尺スロット916とを有し得る。
ハンドル遠位端908は、ノズル端部又はルアー端部を備え得る。ルアー端部は、輸送ニードル906を保護する包装ニードルカバー(図9には図示せず)を強固に固定し得る。
輸送ニードル906はまた、ニードル管腔918と、ニードル管腔918内においてスライド可能に移動可能なプッシャ要素920とを有し得る。輸送ニードル906は、金属、合金、又は剛性医療用ポリマを含むか、又はこれらからなり得る。輸送ニードル906がポリマで作成されるとき、輸送ニードル906は、放射線不透過性の材料又はコーティングで被覆され得る。プッシャ要素920は、プッシャ遠位端922と、プッシャ遠位端922の反対のプッシャ近位端924とを有し得る。
プッシャ要素920は、プッシャ近位端924の付近に取り付けられたプッシャプラグ926を有し得る。プッシャプラグ926は、プッシャ要素920に沿った静的位置に取り付けられ得る。プッシャプラグ926は、プッシャプラグ926の背面に沿って規定された多数のねじ込み孔部又は穴部を有し得る。輸送制御904は、プッシャプラグ926のねじ込み孔部又は穴部内にねじ固定されたファスナ928を介して、プッシャ要素920に接続され得る。各ファスナ928の少なくとも一部は、輸送制御904がプッシャ要素920に連結されるとき、長尺スロット916を通じて伸び得る。他のバリエーションによると、輸送制御904は、接着剤、締り嵌め、係止ばめ、クリップ、留め金、スナップボタン、ワイヤコネクタ、インサート成形、これらの組み合わせを介して、プッシャプラグ926に接続され得る。長尺スロット916は、輸送制御904の長手方向移動のための軌道又は案内レーンとして作用し得る。輸送制御904は、ハンドル遠位端908に向かって押圧されるか、又はハンドル委近位端910に向かって引っ張られることにより、プッシャ要素920をニードル管腔918内で移動させ得る。
ハンドル902に対して輸送制御904を位置決め又は配向することは、ハンドル902に対して位置特定要素930の展開配向することを示し得る。例えば、位置特定要素930は、輸送制御904の配される組織位置特定装置900の側に向かって展開し得る。或いは、位置特定要素930は、輸送制御904から組織位置特定装置900の反対側に向かって展開するか、又は輸送制御904は、位置特定要素の展開の方向を向いた矢印を有し得る。
組織位置特定装置900はまた、位置特定要素930と、位置特定要素930に連結された可撓性トラッキングワイヤ932とを備え得る。トラッキングワイヤ932は、ワイヤ遠位端936を備えたワイヤ遠位セグメント934と、ワイヤ近位端940を備えたワイヤ近位セグメント938とを有し得る。
位置特定要素930は、輸送ニードル906によって制限されないとき、又は輸送ニードル906から展開されるとき、展開構成942に丸まるか、又は湾曲され得る。位置特定要素930は、輸送ニードル906のニードル管腔918内に位置決めされるとき、平坦又は畳まれた構成に加圧又は形成され得る。位置特定要素930は、組織位置特定装置900が組立状態にあるとき、最初はニードル管腔918内に位置決めされ得る。位置特定要素930は、ニードル管腔918内でスライド可能に移動し得る。以下に検討する通り、位置特定要素930は、位置特定要素930がニードル管腔918内にあるとき、プッシャ要素920によって取外し可能に保持されるか、プッシャ要素920で取外し可能に係止可能である。
図9はまた、ハンドル902が多数の展開段階マーカ944を有し得ることを示している。展開段階マーカ944は、ハンドル902の外面に沿ったグラフィクス、エッチング、又は凹みであり得る。展開段階マーカ944は、展開段階マーカ944に対する輸送制御904の位置に基づき、位置特定要素930の展開程度をユーザに包囲することができる。展開段階マーカ944は、開始マーカ946、初期展開マーカ948、中間展開マーカ950、及び展開マーカ952を含み得る。
開始マーカ946は、ハンドル近位端910の最も近位のマーカであり得る。位置特定要素930は、輸送制御904が開始マーカ946の後方に位置決めされるとき、完全にニードル管腔918内にあり得る。初期展開マーカ948は、開始マーカ946の遠位に位置決めされ得る。位置特定要素930の少なくとも一部は、輸送制御904が開始マーカ946と初期展開マーカ948との間に位置決めされるとき、ニードル管腔918の外側に配置され得る。中間展開マーカ950は、初期展開マーカ948の遠位に位置決めされ得る。位置特定要素930の長さの少なくとも半分は、輸送制御904が初期展開マーカ948と中間展開マーカ950との間に位置決めされるとき、ニードル管腔918の外側に位置決めされ得る。中間展開マーカ950はまた、位置特定要素930が依然として輸送ニードル906内に撤退して戻ることのできるポイントを示し得る。展開マーカ952は、ハンドル遠位端908に最も近いマーカであり得る。位置特定要素930は、輸送制御904が中間展開マーカ950と展開マーカ952との間に位置決めされるとき、完全に横方向に展開され得る。展開マーカ952はまた、位置特定要素930がもはや輸送ニードル906内に撤退して戻れないポイントを示し得る。
図9はまた、輸送ニードル906が多数のニードル深さマーカ954を有し得ることを示している。ニードル深さマーカ954は、ニードル先端とニードル基部との間に配置され得る。ニードル深さマーカ954は、輸送ニードル906の表面上の標識、エッチング、又は表面凹みであり得る。ニードル深さマーカ954は、執刀医、放射線科医、又はその他の撮像専門家等のユーザが輸送ニードル906を患者の組織内に挿入する支援を行うことができる。ニードル深さマーカ954は、ミリメートル、センチメートル、又はこれらの組み合わせのインクリメントで離間され得る。
図10Aは、輸送制御904が輸送制御が第1の界面1000と第2の界面1002とを有する略三角形の構成要素を備え得ることを示している。第1の界面1000及び第2の界面1002は、傾斜又は隆起したものとすることができる。第1の界面1000は、ハンドル近位端910からハンドル遠位端908を見たとき、上方に凹み得る。第2の界面1002は、ハンドル遠位端908からハンドル近位端910を見たとき、上方に凹み得る。他のバリエーションによると、第1の界面1000及び第2の界面1002は、ユーザが片手で輸送制御904を進行させたり、又は撤退させたりする必要のある任意の形状又は向きであり得る。
組織位置特定装置900の操作方法には、ユーザが、ユーザの片手を使用して組織位置特定装置900のハンドル902を保持することを含み得る。この方法はまた、ユーザが、ハンドル902を保持したのと同一の手の少なくとも1本の手指により、輸送制御904の第1の界面1000を第1の長手方向1004に押圧することを含み得る。本開示において手指と言及する場合はすべて、1つ以上の手指、親指、1本の指の一部、又はこれらの任意の組み合わせが含まれ得る。第1の長手方向1004は、前方方向であり得る。例えば、輸送制御904は、開始マーカ946から初期展開マーカ948、中間展開マーカ950、又は展開マーカ952まで、第1の長手方向1004に押圧され得る。位置特定要素930は、輸送制御904を押圧すること又は引っ張ることに応じて、ニードル管腔918を通じて移動され得る。
輸送制御904が展開マーカ952まで、又はこれを超えて押圧されない場合、この方法はさらに、ユーザにより、第2の界面1002を第2の長手方向1006に引っ張るか、又は第2の界面1002に第2の長手方向1006への力を付与することを含み得る。第2の長手方向1006は、第1の長手方向1004の反対の後方へ向かう方向であり得る。位置特定要素930は、輸送制御904を引っ張ることに応じて、輸送ニードル906内に撤退して戻されるか、又はさらに輸送ニードル906内に撤退して戻され得る。
ユーザは、ハンドル902を保持したのと同一の手の少なくとも1本の手指により、第2の界面1002を引っ張るか、又は第2の界面1002に力を付与し得る。このようにして、組織位置特定装置900は、ユーザの片手で完全に操作され得る。多くの場合、ユーザの他方の手は、超音波トランスデューサの位置決めを行うために同時に使用されているため、この特徴は重要であり、従って、ユーザが輸送ニードル906の位置決めを行い、同時に行われる超音波によるガイダンスの下、ハンドル902を介して位置特定要素930の展開及び撤退を制御することができるようにする。
図10Bは、輸送制御904が展開マーカ952に移動されるとき、位置特定要素930が展開構成942に巻かれ得ることを示している。図10A及び図10Bは、ワイヤ近位多940等、輸送制御904が展開マーカ952に移動されるとき、トラッキングワイヤ932の少なくともセグメントがハンドル近位端910から伸び得ることを示している。トラッキングワイヤ932のより多くの部分は、輸送制御904が第2の長手方向1006においてハンドル近位端910に向かって引っ張られる際、ハンドル近位端910から伸び得る。トラッキングワイヤ932は、位置特定要素930がプッシャ要素920で取外し可能に保持されるか、又はプッシャ要素920で取り外し可能に係止するとき、プッシャ要素920の管腔内に収容され得る。
図10Cは、ハンドル902がハンドル管腔1008を有し得ることを示している。プッシャプラグ926とプッシャ要素920の少なくともセグメントは、ハンドル管腔1008内に収容され得る。プッシャプラグ926及びプッシャ要素920はまた、ハンドル管腔1008内において長手方向に移動し得る。
図10Cはまた、ハンドル902がハンドル長さ1010を有し得ることを示している。例えば、ハンドル長さ1010は、12.0cm〜20.0cmの間であり得る。ハンドル長さ1010は、約16.0cmであり得る。図10Cはさらに、輸送ニードル906がニードル長さ1012を有し得ることを示している。例えば、ニードル長さ1012は、約10.0cm〜15.0cmの間であり得る。ニードル長さ1012は、約12.0cmであり得る。図10Cはまた、プッシャ要素920がプッシャ長さ1014を有し得ることを示している。例えば、プッシャ長さ1014は、約16.0cm〜20.0cmであり得る。プッシャ長さ1014は、約17.5cmであり得る。図10Cはさらに、トラッキングワイヤ932がワイヤ長さ1016を有し得ることを示している。例えば、ワイヤ長さ1016は、約20.0cm〜30.0cmの間であり得る。ワイヤ長さ1016はまた、目標組織部位の位置に応じて、30cm超であり得る。
図10Dは、ファスナ928が輸送制御904の一部内に伸びて、輸送制御904をプッシャプラグ926及びプッシャ要素920に接続し得ることを示している。図10Dはまた、輸送制御904、プッシャプラグ926、プッシャ要素920が長手方向において、第1の長手方向1004又は第2の長手方向1006に移動する際、長尺スロット916がファスナ928に間隙を与え得ることを示している。図10Dはさらに、輸送制御904をプッシャプラグ926を介してプッシャ要素920に接続することにより、プッシャ要素920がハンドル管腔1008又はニードル管腔918から完全に移動されること(例えば、押されたり、又は引っ張られたりすること)を防ぐことを示している。いくつかのバリエーションによると、組織位置特定装置900は、ギア機構を備えており、プッシャ要素920の移動は、ギア機構によって促進され得る。
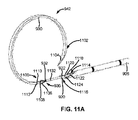
図11A及び図11Bは、位置特定要素930がロケータ近位端1100とロケータ遠位端1102とを有し得ることを示している。ロケータ遠位端1102は、組織を穿刺するための鋭利なロケータ先端1104を有し得る。ロケータ近位端1100は、開口1108、狭窄部1110、及び肩部1112を包囲する小穴フレーム1106を備え得る。小穴フレーム1106は、狭窄部1110により、肩部1112に接続され得る。開口1108は、小穴フレーム1106の略中間に位置決めされ得る。開口1108は、トラッキングワイヤ932を受容するように構成された開口、穴部、又は孔部であり得る。
図11A及び図11Bはまた、プッシャ要素920がプッシャ背面側1114と、プッシャ背面側1114の反対のプッシャ前面側1116とを有し得ることを示している。輸送ポート1118は、プッシャ遠位端922の近位のプッシャ背面側1114に沿って規定され得る。輸送ポート1118は、プッシャ背面側1114に沿った切り込みであり得る。位置特定要素930の小穴フレーム1106は、位置特定要素930がニードル管腔918内にあるとき、プッシャ要素920の輸送ポート1118内に取外し可能に位置決めされ得る。位置特定要素930の小穴フレーム1106、肩部1112、及び狭窄部1110は、本明細書中、連動フレームワークと総称され、これにより、位置特定要素930にプッシャ要素920と解放可能に係止させる。位置特定要素930の動き又は移動は、連動フレームワークが輸送ポート1118内に位置決めされるか、又は輸送ポート1118で係止されるとき、輸送制御904によって制御可能である。特に、連動フレームワークによる位置特定要素930とプッシャ要素920との連動により、輸送制御904の長手方向の移動を、位置特定要素930を輸送ニードル906内の遠位方向及び近位方向の双方においてスライドさせ、位置特定要素930を輸送ニードル906から押し出すとともに、これを輸送ニードル906内に撤退させる。
位置特定要素930は、プッシャ遠位端922が位置特定要素930の肩部1112を輸送ニードル906から第1の長手方向1004に押圧するとき、輸送ニードル906から展開され得る。位置特定要素930の連動フレームワークは、輸送ポート1118が輸送ニードル906の管腔を出るとき、プッシャ要素920の輸送ポート1118から解放され得る。位置特定要素930は、展開時、略円形の展開構成942に丸まり得る。位置特定要素930は、輸送ニードル906から展開されるとき、ハンドル背面側912の方に丸まるか、又は湾曲し得る。
位置特定要素930は、金属、合金、ポリマ、又はこれらの組み合わせを含むか、又はこれらからなり得る。いくつかのバリエーションによると、位置特定要素930は、形状記憶金属を含むか、又は形状記憶金属からなり得る。例えば、位置特定要素930は、Nitinol(登録商標)等の合金を含むか、又はこれからなり得る。位置特定要素930は、組織を貫通し、予定されている切除及び/又は解析のために組織塊の境界又はガイダンスマーカとしての役割を果たし得る。
位置特定要素930は、位置特定要素930とニードル管腔918内面との間のスライド摩擦を低減するように、処理又は仕上げされ得る。例えば、位置特定要素930は、電子研磨又は機械研磨され得る。位置特定要素930はまた、ブルーオキサイド仕上げによって被覆され得る。位置特定要素930は、位置特定要素930を塩浴中で加熱処理することにより、ブルーオキサイド仕上げで被覆され得る。
位置特定要素930は、金属又はワイヤの可撓性長さ、ポリマの可撓性長さ、形状記憶材料の可撓性長さ、又はこれらの組み合わせであり得る。位置特定要素930は、輸送ニードル906.1から展開されるとき、円弧状、曲線状、又はループ状を採り得る。
プッシャ遠位端922は、傾斜しており、プッシャ前面側1116と鈍角を形成し得る。プッシャ遠位端922とプッシャ前面側1116とによって形成される鈍角は、組織位置特定装置900の横側からみたときに視認され得る。プッシャ遠位端922の傾斜設計により、肩部1112がニードル管腔918の頂上部に向かって上方に丸まることなく、より効果的にプッシャ要素920に位置特定要素930の肩部1112を第1の長手方向1004に押圧させることができる。これにより、位置特定要素930がニードル管腔918を通じて移動される際、位置特定要素930とニードル918との間のスライド摩擦を低減することができる。プッシャ遠位端922はまた、組織位置特定装置900の横側から見たとき、プッシャ背面側1114と鋭角を形成し得る。
以上に検討した通り、位置特定要素930の動き又は移動は、小穴フレーム1106が輸送ポート1118内に位置決めされるとき、輸送制御904によって制御され得る。輸送ポート1118は、遠位ポート側1120、近位ポート側1122、及びポート基部1124を有し得る。遠位ポート側1120は、組織位置特定装置900の横側から見たとき、ポート基部1124と鋭角を形成し得る。
位置特定要素930は、ロケータ遠位端1102等、位置特定要素930の少なくとも一部がニードル管腔918を出た後であっても、輸送ニードル906内に撤退して戻され得る。位置特定要素930は、プッシャ要素920の遠位ポート側1120が第2の長手方向1006に小穴肩部1113を引き寄せるとき、輸送ニードル906内に撤退して戻され得る。プッシャ要素920は、例えば、ユーザが第2の長手方向1006において輸送制御904の第2の界面1002に力を付与するとき、第2の長手方向1006に引っ張られ得る。
プッシャ要素920は、プッシャ管腔1126を有し得る。位置特定要素930の狭窄部1110は、小穴フレーム1106が輸送ポート1118内に位置決めされるとき、プッシャ管腔1126のセグメント内に位置決めされ得る。
図11A及び図11Bはまた、トラッキングワイヤ932が位置特定要素930のロケータ近位端1100に連結され得ることを示している。トラッキングワイヤ932は、位置特定要素930の小穴フレーム1106に連結されるか、又は小穴フレーム1106に結ぶ付けられ得る。トラッキングワイヤ932のワイヤ遠位端936は、ループ1128が小穴フレーム1106の周囲で形成されるように、開口1108を通じてねじ込まれ得る。そしてワイヤ遠位端936は、取付部位1130にて、トラッキングワイヤ932の他のセグメントに固定され得る。例えば、ワイヤ遠位端936は、ワイヤ遠位セグメント934に沿った取付部位1130に固定され得る。より具体的には、ワイヤ遠位端936は、取付部位1130としての役割を果たす部位において、トラッキングワイヤ932の他のセグメントに溶接されるか、又は接着剤で接着され得る。他のバリエーションによると、ワイヤ遠位端936は、フェルールを使用して、トラッキングワイヤ932の他のセグメントに結ぶ付けられるか、又はトラッキングワイヤ932の他のセグメントに圧着され得る。
トラッキングワイヤ932は、金属又はステンレススチール等の合金を含むか、又はこれらからなり得る。トラッキングワイヤ932は、可撓性、伸張強度、及び薄い外形を得るためにケーブルを含むか、又はケーブルからなり得る。例えば、ケーブルは、19フィラメント金属ワイヤケーブルであり得る。他のバリーションによると、トラッキングワイヤ932は、成形外科等での適用で使用される高伸張強度の編み糸等、編みケーブルを含むか、又は編みケーブルからなり得る。
ポリマ外被1132は、トラッキングワイヤ932の少なくとも一部を被覆するか、又はこれに塗布され得る。ポリマ外被1132はまた、取付部位1130を被覆又は包囲することができる。ポリマ外被1132は、トラッキングワイヤ932の周辺を取り囲む熱収縮ポリマ又はチューブであり得る。トラッキングワイヤ932の少なくとも一部は、位置特定要素930がプッシャ要素920に取外し可能に保持されるか、又はプッシャ要素902で取外し可能に係止するとき、プッシャ管腔1126、ニードル管腔918、及びハンドル管腔1008内に位置決めされ得る。トラッキングワイヤ932の隣り合った部分を外被で被覆することにより、トラッキングワイヤ932は、1つのフィラメントとして挙動し、例えば、巻き付ける間、又は実質的に手術による標本切除中、トラッキングワイヤ932の臨床医による取扱をより容易にする。
位置特定要素930が一旦プッシャ要素920から取り外されると、トラッキングワイヤ932は、輸送ニードル906が展開された位置特定要素930から離れて撤退させられる際、プッシャ管腔1126とニードル管腔918とを出ることができる。例えば、位置特定要素930は、患者の組織内に輸送ニードル906から展開され得る。本例において、組織位置特定装置900のオペレータは、患者の組織から輸送ニードル906をゆっくり撤退させることができる。輸送ニードル906が患者から撤退させられる際、トラッキングワイヤ932のより多くの部分が露出され得る。以下に検討する通り、トラッキングワイヤ932の少なくともセグメントは、輸送ニードル906が患者から取り外された後、患者の組織内に残され得る。
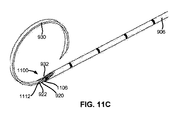
図11C及び図11Dは、小穴フレーム1106が輸送ポート1118内に位置決めされるとき、位置特定要素930の動き又は移動が輸送制御904によって制御され得ることを示している。位置特定要素930は、輸送ポート1118によって保持された小穴フレーム1106の少なくとも一部が輸送制御904によって輸送ニードル906から移動されるとき、プッシャ要素920及び輸送ニードル906から自動的に取外し又は除去され得る。例えば、位置特定要素930は、小穴フレーム1106がニードル管腔918から押圧され、位置特定要素930がもはやニードル管腔918の内面によって制限されないとき、プッシャ要素920から自動的に分離、取外し、又は除去され得る。位置特定要素930は、小穴フレーム1106がもはや輸送ポート1118内に位置決めされないとき、プッシャ要素920から取り外されると考えられ得る。図11Dに示される通り、プッシャ要素920の回転の向きにより、位置特定要素930のプッシャ要素920からの自動的な取外しを改善することができる。この向きにより、位置特定要素930が、位置特定要素の形状記憶によって課される動きの本来の方向により、プッシャ要素920から離れて自在に移動できるように促進する。この向きは、位置特定要素930の連動フレームワークが一旦輸送ニードル906の孔部によってもはや制限されなくなると、プッシャ要素920と位置特定要素930との間の連動接続から自動的に離間できるようにする。
位置特定要素930は、小穴フレーム1106の少なくとも一部が輸送ポート1118内に依然として位置決めされるとき、輸送ニードル906内に撤退して戻され得る。
図11E及び図11Fは、位置特定要素930が組織位置特定装置900の残りの部分から取り外されるとき、ロケータ近位端1100に連結されたトラッキングワイヤ932が位置特定要素930に対して旋回又は回転し得ることを示している。例えば、ワイヤ遠位セグメント934によって形成されたループ1128は、小穴フレーム1106に対して旋回又は回転可能である。
図11E及び図11Fは、トラッキングワイヤ932の空間的配列が最初に展開位置特定要素930の曲率に対して基本的に正接して位置決めされ得ることを示している。例えば、位置特定要素930は、展開構成942にあるとき、円形形状に丸まり、トラッキングワイヤ932は、最初に円形形状の位置特定要素930に対して配列された接線であり得る。図11E及び図11Fはまた、トラッキングワイヤ932によって形成されるループ1128が、通常は、ニードル管腔918から制限されなくなる際、位置特定要素930の近位端の動きにより、小穴フレーム1106に対して実質的に旋回又は回転し得ることを示している。ループ1128が一旦旋回又は回転すると、位置特定要素930に対するトラッキングワイヤ932の空間的配列が変更し得る。例えば、トラッキングワイヤ932の少なくともセグメントは、ワイヤ遠位セグメント934によって形成されたループ1128が一旦旋回又は回転すると、円形形状位置特定要素930に対して割線として、又は非接線の向きで、配列され得る。
トラッキングワイヤ932は、位置特定要素930が組織位置特定装置900の輸送システムの残りの部分から一旦取り外されると、位置特定要素930に対してその空間的配列を自動的に変更し得る。例えば、トラッキングワイヤ932が丸められた位置特定要素930に正接して配列されたとき、位置特定要素930は、トラッキングワイヤ932が引っ張られたとき、又は患者が動いたとき、患者の組織内での不注意による変位の影響をより受けやすくなり得る。位置特定要素930に対してトラッキングワイヤ932の空間的配列を変更することにより、展開された位置特定要素930が、トラッキングワイヤ932を引き寄せることにより、又は患者が動くとき、患者の組織内で変位をより起こしにくくし得る。また割線又は非接線の接線配列から位置特定要素930に対してトラッキングワイヤ932の配列を変更することにより、トラッキングワイヤ932が患者又は健康専門家によって引っ張られているとき、又は患者が動くとき、位置特定要素930が不注意で患者の組織から撤退してしまうリスクを低減することができる。
図12は、組織位置特定装置900がポリマライナ1200を備え得ることを示している。ポリマライナ1200は、プッシャ要素920の少なくとも一部を放射状に覆うか、又は包囲し、輸送ニードル906内においてスライド可能に移動可能である。ポリマライナ1200は、プッシャ要素920がニードル管腔918を通じて移動される際、ニードル管腔918の表面とともに、プッシャ要素920の外面と位置特定要素930の少なくとも一部との間の金属同士の接触を防ぐことができる。ライナ1200はまた、プッシャ要素が輸送ニードル管腔を通じて進行する際、プッシャ要素920とともに移動することにより、金属がライナ1200によって覆われた位置特定要素930の一部の金属に対してスライドするのを防ぐことができる。ポリマライナ1200は、プッシャ要素920がニードル管腔918を通じて進行する際、プッシャ要素920、位置特定要素930、又はトラッキングワイヤ932によって作用させられる静的及び/又は動的な摩擦力を低減するために、プッシャ要素920の外面とニードル管腔918の表面、又は位置特定要素930の一部、又はトラッキングワイヤ932とニードル管腔918の表面との間に挟まれるか、又は押圧され得る。
ニードル管腔918は、管腔背面1202と管腔前面1204とを有し得る。管腔背面1202とは、ニードル管腔918の上方部分又は上半分を言及するものであり得る。管腔前面1204は、ニードル管腔918の下方部分と下半分を言及するものであり得る。ポリマライナ1200は、プッシャ要素920がニードル管腔918を通じて長手方向に移動される際、プッシャ要素920の外面とニードル管腔918との間に接触が生じないように、プッシャ要素920を完全に取り囲むか、または包囲し得る。他のバリエーションによると、ポリマライナ1200は、プッシャ背面側1114を被覆し、プッシャ要素920がニードル管腔を通じて長手方向に移動される際、プッシャ背面側1114が管腔背面1202に接触するのを防ぎ得る。ポリマライナ1200は、プッシャ前面側1116を被覆し、プッシャ要素920がニードル管腔918を通じて長手方向に移動される際、プッシャ前面側1116が管腔前面1204に接触するのを防ぐことができる。
ポリマライナ1200は、ポリエーテルエーテルケトン(PEEK)を含むか、又はこれから製造され得る。他のバリエーションによると、ポリマライナ1200は、ニードル管腔918を通じたプッシャ要素920の長手方向の移動を促進可能な任意のポリマ又はポリマブレンド(例えば、フルオロポリマ)を含むか、又はこれから製造可能である。
ポリマライナ1200は、ニードル長さ1012と略同等のライナ長さを有し得る。他のバリエーションによると、ニードル長さ1012は、ライナ長さ1206より長くすることができる。
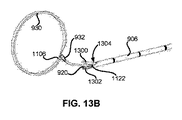
図13A〜図13Cは、ポリマライナ1200が背部ライナ1300と前部ライナ1302とを備え得ることを示す。背部ライナ1300と前部ライナ1302は、プッシャ要素920を径方向に取り囲むか、又は包囲するように組み合わせ得る。ポリマライナ1200は、ライナ遠位セグメント1304を有し得る。ライナ遠位セグメント1304は、プッシャ遠位端922から近位ポート側1122まで伸び得る。
図13Bは、ライナ遠位セグメント1304がニードル管腔918から押圧又は展開されるとき、前部ライナ1302から分離され得る。背部ライナ1300は、前部ライナ1302から離間して丸まることにより、前部ライナ1302から離間し得る。背部ライナ1300は、位置特定要素930がプッシャ要素920からとりはずされるとき、前部ライナ1302から離間し得る。例えば、位置特定要素の形状記憶によってライナに作用する力のために、小穴フレーム1106は小穴フレーム1106が輸送ポート1118から取り外されるか、又は物理的に変位する際、ライナ遠位セグメント1304にて前部ライナ1302から背部ライナ1300を分離し得る。
背部ライナ1300は、位置特定要素930がニードル管腔918を通じて移動されるとき、プッシャ要素920からの位置特定要素930が不注意に外れてしまうことに対する追加のセーフガードとして作用し得る。例えば、プッシャ要素920のポート基部1124に沿った背部ライナ1300は、位置特定要素930がニードル管腔918内にあるとき、又はニードル管腔918を通じて動いているとき、小穴フレーム1106を輸送ポート1118内に保持する追加の層の材料として作用し得る。
背部ライナ1300と前部ライナ1302とを備えるポリマライナ1200は、部分的にプッシャ要素920に取り付けられ得る。例えば、ポリマライナ1200は、UV硬化接着剤により、プッシャ要素920に取り付けられ得る。ポリマライナ1200は、プッシャプラグ926内での圧着等の方法により、プッシャ要素920機械的に篏合され得る。
背部ライナ1300は、プッシャ要素920がニードル管腔918内に戻る第2の長手方向1006に移動されるとき、前部ライナ1302にもう一度接合して、プッシャ要素920を径方向に取り囲むか、又は包囲し得る。例えば、背部ライナ1300は、プッシャ要素920に沿った位置特定要素930がニードル管腔918内に後退して戻るとき、前部ライナ1302にもう一度接合し得る。また例えば、背部ライナ1300は、位置特定要素930が輸送ニードル906から完全に展開され、且つプッシャ要素920がニードル管腔918内に撤退して戻るとき、前部ライナ1302に再び接合し得る。
図14A及び図14Bは、輸送ニードル906が面取り遠位端1400とニードルディンプル1402とを有し得ることを示している。面取り遠位端1400は、面取り遠位端1400の近位縁1406に沿う丸められた縁部1404と、ニードル先端1410に合流する2つの横方向の鋭利な縁部1408とによって規定され得る。
丸められた縁部1404は、2つの横方向の鋭利な縁部1408とニードル先端1410との近位に位置決めされ得る。2つの横方向の鋭利な縁部1408とニードル先端1410とは、真皮を通じて、患者の仮想組織内に穿刺するように構成され得る。面取り遠位端1400の近位縁1406は、2つの横方向の鋭利な縁部1408とニードル先端1401との一部として含まれない、面取り遠位端1400の一部であり得る。丸められる縁部1404は、近位縁1406の縁部を平滑にするか、又は丸めることによって形成された近位縁1406の表面特徴であり得る。丸められた縁部1404は、半径を有し得る。丸められた縁部1404は、さもなければ鋭利な縁部を有した面取り遠位端1400によって生じる、位置特定要素930に対する機械的損傷を低減し得る。
輸送ニードル906は、ニードル背面側1412と、ニードル背面側1412の反対のニードル前面側1414とを有し得る。ニードルディンプル1402は、ニードル背面側1412に沿った凹部、窪み又は平坦化領域であり得る。ニードルディンプル1402は、半楕円形状であり得る。他のバリエーションによると、ニードルディンプル1402は、円形又は長円形であり得る。ニードルディンプル1402は、面取り遠位端1400の丸められた縁部1404の近位であり得る。
図14Cは、ニードルディンプル1402がディンプル長さ1418を有し得ることを示している。例えば、ディンプル長さ1418は、約0.5mm〜1.5mmの間であり得る。
図14Dは、ポリマライナ1200の被覆されたプッシャ要素920がニードルディンプル1402を有する面取り遠位端1400から長手方向に移動し得ることを示している。プッシャ要素920は、中空の内側を有する長尺半円筒であり得る。ニードルディンプル1402は、プッシャ要素920を輸送ニードル906の面取り遠位端1400からより容易に出させ得る。
図14Eは、ニードル管腔918が管腔直径1416を有し得ることを示している。例えば、管腔直径1416は、約0.8mm〜1.3mmまでであり得る。図14Eはまた、ニードルディンプル1402がディンプル幅1420を有し得るを示す。ディンプル幅1420は、約0.5mm〜1.1mmとの間であり得る。ディンプル幅1420は、ニードルディンプル1402によって邪魔されることなく、プッシャ要素920がニードルディンプル1402によって規定される輸送ニードル906の部分を過ぎて移動させ得るように、管腔直径1416未満であり得る。
ディンプル幅1420が管腔直径1416未満であるとき、プッシャ要素920の横側は、プッシャ要素902がニードル管腔918を通じて移動する際に、ニードルディンプル1402によって邪魔されないようにし得る。ニードルディンプル1402は、位置特定要素930を輸送ニードル906の面取り遠位端1400から容易に出させ得る。例えば、ニードルディンプル1402は、位置特定要素930が輸送ニードル906から展開されているとき、小穴フレーム1106が輸送ポート1118から不注意で取り外される確率を低減し得る。
例えば、輸送ニードル906のニードル管腔918上におけるニードルディンプル1402の凹みにより、位置特定要素を後退又は前進させる際、位置特定要素930が輸送ニードル906の面取り遠位端1400から離間して押圧されるようにする。これにより、輸送ニードル906の面取り遠位端1400に対して位置特定要素930の摩擦及び/又は摩耗を低減する。
ニードルディンプル1402により、位置特定要素930の少なくとも一部が輸送ニードル906から展開されたとき、位置特定要素930が輸送ニードル906の面取り遠位端1400内に後退させられるか、又は面取り遠位端1400から展開されるようにし得る。他の例として、プッシャ要素920がニードル管腔918内に展開されているとき、小穴フレーム1106をさらに輸送ポート1118内に押圧することにより、ニードルディンプル1402は、輸送ポート1118が小穴フレーム1106を確実に保持するようにさせる。
図14Eはまた、ポリマライナ1200は、ライナ内径1422とライナ外径1424とを有し得ることを示している。ライナ内径1422は、約0.90mm〜1.10mmの間であり得る。例えば、ライナ内径1422は、約1.10mmであり得る。ライナ外径1424は、約1.00mm〜1.20mmの間であり得る。例えば、ライナ外径1424は、約1.14mmであり得る。
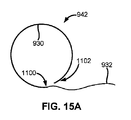
図15Aは、トラッキングワイヤ932が、ロケータ近位端1100において、位置特定要素930に連結され得ることを示している。例えば、トラッキングワイヤ932は、位置特定要素930の小穴フレーム1106の周囲でループ化され得る。図15Aに示される通り、位置特定要素930は、略円形の展開構成942を有し得る。展開構成942は、位置特定要素930の所定の形状又は構成であり得る。例えば、展開構成942は、製造プロセス中、位置特定要素930を熱間硬化させることによって得られた形状記憶構成であり得る。位置特定要素930は、組織位置特定装置900の残りの部分から展開されるか、又は取り外されるとき、その展開構成942に自動的に転換され得る。
図15Bは、位置特定要素930がロケータ長さ1500を有し得ることを示している。例えば、位置特定要素930が略円形の展開構成942に形成されるとき、ロケータ長さ1500は、周囲長であり得る。図15Bは、トラッキングワイヤ932がロケータ長さ1500に沿った中間点1502にて位置特定要素930に連結され得ることを示している。例えば、位置特定要素930は、中間点1502に規定された開口又は切り込みを有し、トラッキングワイヤ932は、開口又は切り込みを通じてループ化され、中間点1502にて位置特定要素930に結び付けられ得る。
トラッキングワイヤ932は、中間点1502とロケータ近位端1100との間又は中間点1502とロケータ遠位端1102との間の点にて、位置特定要素930に連結され得る。トラッキングワイヤ932は、位置特定要素930が患者の組織内で展開されるとき、トラッキングワイヤ932が位置特定要素930を不注意で変位又は撤退させることを防ぐため、ロケータ近位端1100以外の位置特定要素930の長さに沿った中間点1502又は他の点に連結され得る。例えば、トラッキングワイヤ932は、ユーザがトラッキングワイヤ932を引っ張るとき、位置特定要素930が患者の組織内で展開された後に患者が動くとき、位置特定要素930を不注意で変位又は後退させ得る。
図15C及び図15Dは、小鎌状又は鎌状の展開構成942を有する位置特定要素930を示している。小鎌状又は鎌状は、部分的円形形状又は三日月形状であり得る。図15Cに示される通り、トラッキングワイヤ932は、ロケータ近位端1100にて小鎌状又は鎌状の位置特定要素930に連結され得る。
図15Eは、トラッキングワイヤ932が位置特定要素930の丸められたロケータ長さ1500に沿った中間点1502にて、小鎌状又は鎌状の展開構成942を有する位置特定要素930と連結され得ることを示している。位置特定要素930の異なる展開形状により、組織位置特定装置900に異なるサイズ及び形状の組織塊を位置特定又は区切らせ得る。
図15Fは、トラッキングワイヤ932が中間点1502とロケータ近位端1100との間のロケータ長さ1500に沿った取付点1504にて、位置特定要素930に連結され得ることを示している。例えば、取付点1504は、ロケータ長さ1500の1/4の点に配置され得る。位置特定要素930は、取付点1504に規定された開口又は切り込みを有し、トラッキングワイヤ932は、開口又は切り込みを通じてループ化され、取付点1504にて位置特定要素930に結び付けられ得る。
図16は、位置特定要素930が展開構成942にあるとき、湾曲面1600を有し得ることを示している。湾曲面1600は、位置特定要素930を配向するのに使用される2次元平面であり得る。例えば、図11A〜図11Fに示される位置特定要素930のバリエーションによると、位置特定要素930全体が、湾曲面1600と実質的に並んで湾曲され得る。図16は、位置特定要素930の少なくとも一部が湾曲面1600と並んで湾曲され、位置特定要素930の他の部分が湾曲面1600から外れて湾曲されるか、さもなければ配向され得ることを示している。
例えば、ロケータ近位端1100は、湾曲面1600と並んで湾曲し、ロケータ遠位端1102は、湾曲面1600から外れて湾曲され得る。図16に示される通り、位置特定要素930は、展開構成942にあるとき、完全又は部分的に螺旋形状を有し得る。位置特定要素930の一部は、湾曲面1600から外れて湾曲して、患者の体内の疑わしい組織塊を3次元で意図特定又は区切り得る。
図17は、位置特定要素930が分岐遠位セグメント1700を有し得ることを示している。図17に示される通り、分岐遠位セグメント1700は、2つ以上の鋭利なロケータ先端1104を有するロケータ遠位端1102の場合であり得る。例えば、分岐遠位セグメント1700が2つの鋭利なロケータ先端1104を有するとき、2つの鋭利なロケータ先端1104は、互いに離間する角度で枝分かれし得る。位置特定要素930の分岐遠位セグメント1700により、位置特定要素930を患者の組織内により強固に固定させることができ、且つ、組織部位を3次元でより完全に描くことができる。
図18Aは、患者の組織1800に展開された位置特定要素930が疑わしい組織塊1802の少なくとも一部を取り囲むか、又は放射状に包囲し得ることを示している。例えば、組織1800は、胸部組織又は肺組織を含み得る。疑わしい組織塊1802は、腫瘍又はその他の癌細胞、神経組織、リンパ節、瘢痕組織、目標組織、線維腺腫、切開か、その他の病変組織、又はこれらの組み合わせを含み得る。
図18Aは、展開構成942にある位置特定要素930が湾曲面1600と並んで湾曲されるか、又は丸められ得る。位置特定要素930は、湾曲面1600が疑わしい組織塊1802の少なくとも一部と交差するとき、疑わしい組織塊1802の少なくとも一部を取り囲むか又は放射状に包囲し得る。展開された位置特定要素930は、さらなる解析又は切除のために疑わしい組織塊1802の位置又は境界(例えば、後縁)を特定及び区別するための境界又はガイドとしての役割を果たし得る。
図18B〜図18Eは、位置特定要素930が疑わしい組織塊1802に隣接するか、又は疑わしい組織塊1802に当接して展開され得ることを示している。例えば、位置特定要素930は、位置特定要素930が疑わしい組織塊1802に隣接したハローの種別を形成することにより、疑わしい組織塊1802の上方又は疑わしい組織塊1802の近位に展開され得る。この展開をハロー展開と称することができる。位置特定要素930は、位置特定要素930によって形成された湾曲面1600が疑わしい組織塊1802の少なくとも一部と交差しないように、疑わしい組織塊1802に隣接するか、又は疑わしい組織塊1802に当接する1つ以上の箇所で展開され得る。疑わしい組織塊1802の上方又は疑わしい組織塊1802から離間して位置特定要素930を展開することにより、ユーザは、位置特定要素930が確実に疑わしい組織塊1802又は付近の他の組織構造を穿刺、貫通、又は妨害することがないようにし得る(例えば、神経、血管等)。
図18A、図18B、及び図18Dは、位置特定要素930に連結されたワイヤ遠位端936が患者の組織1800内で展開されている間、トラッキングワイヤ932の少なくともセグメントが患者の組織1800から延び得ることを示している。トラッキングワイヤ932は、患者の組織1800内において輸送ニードル906が採る進路を執刀医に報知する進路又は痕跡としての役割を果たし得る。トラッキングワイヤ932は、位置特定要素930の位置への術中のガイドとしての役割も果たしてよい。
展開された位置特定要素930とトラッキングワイヤ932とを使用して疑わしい組織塊1802の位置特定を行う方法は、患者の組織1800の外側に伸びるトラッキングワイヤ932のセグメントを周期的に引き寄せることを含み得る。例えば、疑わしい組織塊1802を切除する担当の執刀医は、患者の組織1800の外側に伸びるトラッキングワイヤのセグメントを引き寄せるか、又は引っ張り得る。この方法はさらに、患者の組織1800の外側に伸びるトラッキングワイヤ932のセグメントを引き寄せつつ、目標組織部位の上方又は目標組織部位の近位の外側組織層(例えば、皮膚又は真皮)をユーザの少なくとも1本の手指で触診又は感じることを含み得る。この方法はまた、トラッキングワイヤ932が引っ張られていることによって示される張力と外側組織層上でユーザの手指で感じられる動きとに基づき、患者の組織1800内で疑わしい組織塊1802を位置決めすることを含んでもよい。
電気焼灼が外科的解剖中に使用される場合、位置特定要素930のいくつかの属性により、外科的解剖中、電気焼灼の不注意によるアーク発生から位置特定要素930及びトラッキングワイヤ932に受けるダメージのリスクを低減することができる。トラッキングワイヤのポリマ外被1132が電気絶縁器としての役割を果たすため、トラッキングワイヤ932への電流を不注意に通すことが低減され得る。またリボン状であるために比較的大きな表面を有するため、より大きな表面積が本質的により電気的に散逸するので、位置特定要素930は、表面積のより小さな位置特定ワイヤに比べて不注意による電気焼灼のダメージをより受けにくくしてもよい。
図19A及び図19Cは、トラッキングワイヤ932が、巻き付けられたセグメント1900内に容易に巻き取られるように十分な可撓性を有し得ることを示している。トラッキングワイヤ932は、極めて高い可撓性を有し、縫合糸又は家庭用糸に匹敵する可撓性を有する。例えば、患者の組織1800の外側に伸びるトラッキングワイヤ932のセグメント(図19B参照)は、巻き付けられたセグメント1900内に容易に巻き取られ、患者の肌(図19C参照)に貼付され得る(例えば、Tegaderm(登録商標)又はその他の生体的剛性接着剤、包帯、又は創傷被覆材を使用)。トラッキングワイヤ932を巻き付けることにより、患者の組織から伸びるトラッキングワイヤ932の余剰セグメントの長さを低減し、通常の布又は創傷被覆材を装着しつつ、確実にトラッキングワイヤ932の余剰セグメントが患者に干渉しないようにするか、または患者の通常の睡眠を妨げないようにする。
組織部位内で位置特定要素932の固定的保持特性を、トラッキングワイヤの縫合のような可撓性と組み合わせることにより、胸部を患った患者が位置特定要素を取り付けた後に帰宅できるようにすることができる。この装置の前に、現在の位置特定ワイヤは、動きすぎる傾向にあり、位置特定ワイヤを定位置につけたまま患者を帰宅させるのには剛性が高すぎた。この属性により、位置特定の手順が外科的組織切除手順(例えば、腫瘍摘出手術)から切り離されるため、重要である。この装置を使用することにより、執刀医はもはや外科的切除(例えば、腫瘍摘出手術)の予定された日に取り付けられた位置特定要素に依存する必要がなくなり、ヘルスケアシステムにとって高価である遅延と手術室のスケジュールの不明確性をなくすので、臨床スケジュールの意味合いにおいて価値がある。
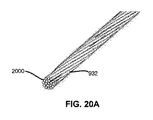
図20Aは、トラッキングワイヤ932が多数のフィラメント2000からなるケーブルより製造し得ることを示している。例えば、トラッキングワイヤ932のケーブルは、各フィラメントがステンレススチール、タングステン、又はその他の材料からなるマルチフィラメント(例えば、19本のフィラメント)ワイヤを含むか、又はこれからなり得る。他のバリエーションによると、トラッキングワイヤ932は、7〜31本のフィラメント2000を含むか、又はこれからなり得る。各フィラメント2000は、フィラメント直径を有し得る。いくつかのバリエーションによると、フィラメント直径は、約0.025mm〜0.035mmの間であり得る。例えば、フィラメント直径は、約0.030mmであり得る。トラッキングワイヤ132はまた、ワイヤ直径を有し、ワイヤ直径は、約0.150mm〜0.155mmの間であり得る。例えば、ワイヤ直径は、約0.152mmであり得る。ケーブルは代わりに、さらに多くのストランド数(例えば、100本までのポリマストランド)と異なる直径を有し得るポリマファイバからなり得る。例えば、ワイヤ直径は代わりに、約0.125mm〜0.25mmの間であり得る。
図20Bは、トラッキングワイヤ932の遠位端が複数のフィラメント端部を捕獲して接合する溶接先端2002を有し得ることを示している。図20Cは、ポリマ外被1132がトラッキングワイヤ932の取付部位1130を取り囲むか、さもなければ包囲し得ることを示している。ポリマ外被1132は、熱収縮性材料で作成されることにより、トラッキングワイヤ932の下層ケーブルにより密接して合致し得る。図20Cは、ポリマ外被1132に熱収縮プロセスを行う前のトラッキングワイヤ932の横断面を示しており、図20Dは、熱収縮後にトラッキングワイヤ932に合致するポリマ外被1132を示す断面図である。取付部位1130は、トラッキングワイヤ932の1つのセグメントがトラッキングワイヤ932の他のセグメントに取り付けられる、トラッキングワイヤ923に沿った部位又はセグメントであり得る。例えば、ワイヤ遠位端936は、小穴フレーム1106内の開口1108を通じてねじ込まれ、再びループ化されて、トラッキングワイヤ932のより近位のセグメントと並べられ得る。その後、ワイヤ遠位端936は、トラッキングワイヤ932のより近位のセグメントに溶接され得るが、この溶接部位を取付部位1130と称することができる。
ポリマ外被1132は、トラッキングワイヤ932と位置特定要素930との間で取付部位1130に近接したトラッキングワイヤ932の一部を包囲してもよく、又はポリマ外被1132は、トラッキングワイヤ932の長さ分、伸びてもよい。ポリマ外被1132はまた、トラッキングワイヤ932の長さを特定するのに使用されてもよい。例えば、ポリマ外被1132の追加の層が、ワイヤ932の遠位端において、トラッキングワイヤ932の約3cmの長さの箇所の周辺に配され得る。外被1132の追加層は、目標組織部位の位置特定を行うのトラッキングワイヤ932を使用する執刀医に対してワイヤ932の感触を変更し、執刀医に対していつ彼/彼女がトラッキングワイヤ932の遠位端に近づいているかを特定することができる。外被1132の追加層は、長さに沿って2cm毎に配する等、トラッキングワイヤ932に沿った異なる箇所に交互に配されてもよい。代わりに、1つ以上の金属フェルール(例えば、ステンレススチール、タンタル)がトラッキングワイヤ932(例えば、ポリマ外被の下方)の長さに沿った1つ以上の箇所に配置され、位置特定要素930の近位の種々のレベルを示してもよい。他の深さ標識方法には、異なる色の付いたポリマセグメントを印刷又は使用することが含まれてもよい。
ポリマ外被1132は、ポリオレフィン、ポリ塩化ビニル(PVC)、又は熱可塑性エラストマ(例えば、PEBAX(登録商標))等、1つ以上のポリマからなり得る。ポリマ外被1132にトラッキングワイヤ932の少なくとも一部を収容することにより、トラッキングワイヤ932への摩擦とダメージのリスクを低減してもよい。さらにポリマ外被1132はまた、トラッキングワイヤ932の引っかかり又はほつれも低減してもよい。
図21は、組織位置特定装置900の操作方法2100を示している。この方法2100は、動作2102において、滅菌包装から組織位置特定装置900を取り出すことを含み得る。この方法2100は、動作2104において、輸送ニードル906を被覆するニードルプロテクタを外すことも含み得る。この方法2100はさらに、動作2106において、片手で組織位置特定装置900のハンドル902を保持し、輸送ニードル906の遠位端1400が疑わしい組織塊(又はその他の目標組織部位)1802に隣接するまで患者の組織内に、超音波又は放射線のガイダンス下において輸送ニードル906を前進させることを含み得る。この方法2100はさらに、動作2108において、ハンドル902を保持したのと同一の手の少なくとも1本の手指を使用して、組織位置特定装置900の輸送制御904を第1の長手方向1004に移動又は押圧させることを含み得る。
この方法2100はさらに、動作2110において、輸送制御904の移動に応じて、輸送ニードル906から組織位置特定装置900の位置特定要素930を移動させることを備え得る。位置特定要素930は、位置特定要素930を保持するプッシャ要素920の輸送ポート1118がニードル管腔918から前進させられるとき、輸送ニードル906の遠位端1400から展開され得る。位置特定要素930が所望の進路に展開されない場合、位置特定要素930は、位置特定要素930の少なくとも一部が輸送ニードル906から展開された後、ニードル管腔内に撤退され得る。輸送ニードル906は、次いで再度位置決めされ得る。例えば、輸送ニードル906は、輸送ニードル906の長手軸回りに回転され(位置特定要素930の所望の展開進路を達成する)、位置特定要素930は、輸送ニードル906から組織内に再度展開され得る。
この方法2100はさらに、動作2112において、展開された位置特定要素930を使用して、疑わしい組織塊1802を包囲したり、取り囲んだり、さもなければ特定することを含み得る。位置特定要素930は、疑わしい組織塊1802の周辺又は疑わしい組織塊1802の上方において展開構成942に形成され得る。位置特定要素930は、プッシャ要素920の輸送ポート1118がニードル管腔918から前進させられるとき、プッシャ要素920から自動的に係合解除又は取り外され得る。
この方法2100はさらに、動作2114において、疑わしい組織塊1802から離間して輸送ニードル906の面取り遠位端1400を撤退させ、位置特定要素930に連結されたトラッキングワイヤ932を露出させることを含み得る。この方法2100はまた、動作2116において、患者の組織から伸びるトラッキングワイヤ932のセグメントの巻き付け及び/又は切断を行い、患者の肌又は患者の着衣に直接又は間接、トラッキングワイヤ932の巻き付けられたか、又は切断されたセグメントを固定すること(例えば、Tegaderm(登録商標)又は他の生体適合性接着剤又は着衣を使用)を備え得る。このようにすることで、トラッキングワイヤ932が不注意で引っ張られたり、又は変位させられたりすることがないように、患者の体から伸びるトラッキングワイヤ932が患者の体のより近くに(例えば、肌の表面と同一平面)固定され得る。この時点で、患者は手順を終えて帰宅でき、患者から位置特定された組織塊1802を外科的に切除する日に戻るように求められるか、又は疑わしい組織塊1802を同日切除することができる。患者の身体に位置特定要素930を装着したのと同一の施設で、腫瘍摘出手術等の切除手順を実施することができる。
図22は、組織の位置特定を行うために組織位置特定装置を使用する方法2200を示している。この方法2200については、図23A〜図23Gを参照して説明する。
この方法2200は、片手で組織位置特定装置を保持しつつ、他方の手で超音波トランスデューサを保持すること(2202)が含まれ得る。例えば、図23Aは、ユーザが、組織位置特定装置900を第1の(例えば、右)て2304で保持しつつ、超音波トランスデューサ2302を第2の(例えば、左)て2306で保持しているところを示している。この方法2200では、組織位置特定装置900の使用について説明するが、ユーザは代わりに、組織位置特定装置100を第1の手2304で保持してもよい。組織位置特定装置900及び超音波トランスデューサ2302は各々、ユーザの片手で操作可能であり、ユーザの片手内に収まるサイズを有し得る。従ってユーザは、組織位置特定装置900と超音波トランスデューサ2302との双方を同時に操作可能である。
この方法2200は、ステップ2204において、片手を使用して、目標組織部位2318からのオフセットにて、輸送ニードル906のニードル先端2312を組織2300内に進行させることを含み得る。目標組織部位は、腫瘍又は病変等の疑わしい組織塊、疑わしい組織塊を直近で包囲する一定量の組織、又は他の任意の量の組織2300を含み得る。ニードル906が組織2300を通じて進行する距離を短くするために、ニードル906は、組織2300の基部から角度2320で前進させられ得る。例えば、組織2300が患者の胸部組織である場合、ニードル906は、患者の胸部面から角度2320で前進させられ得る。角度2320は、組織2300のサイズ、位置特定要素930のサイズ、目標組織部位2318のサイズ、組織に対する組織位置特定装置900の向き、又はその他の因子に応じて決められてもよい。例えば、角度2320は、位置特定要素930が展開時、組織2300の表面を通過しない程度に小さく、可能な場合には、ニードル906が組織2300を通じて進行する距離を低減するのに十分な大きさである。
ニードル先端2312は、目標組織部位2318からオフセットされつつ、目標組織部位に交差する平面、目標部位の近位の平面、又は目標組織部位の遠位の平面に位置決めされるまで、組織2300内を前進させられ得る。オフセットは、位置特定要素930が展開時、目標組織部位と交差することがない、目標組織部位の縁部からの閾値距離であり得る。図23Bの例に示される通り、ニードル先端2312は、目標組織部位2318から距離2314分、オフセットされている。このオフセットは、組織位置特定装置900のユーザの遠位の目標組織部位2318側に向かうものであり得る。例えば、方法2200の実施の際、患者が仰向けに横たわっている場合、ニードル先端2312は、目標組織部位2318に対して患者の背面側に向かってオフセットされ得る。
目標組織部位からのオフセットは、展開時の位置特定要素930の直径と目標組織部位2318のサイズとに基づいて限定可能である。例えば、距離2314は、位置特定要素の直径と目標組織部位の直径との間の差異未満であって、展開時の位置特定要素930が目標組織部位と交差することなく、目標組織部位の少なくとも一部を径方向に包囲できるようにする。或いは、ニードル先端2312は、目標組織部位2318の近位又は遠位の表面において目標組織部位2318からオフセットされてもよい。例えば、ニードル先端2312は、位置特定要素が図18Bに示される通り展開されるように、目標組織部位2318の近位にオフセットされてもよく、この場合、展開された位置特定装置930によって形成される湾曲面は、目標組織部位2318と交差しない。ユーザは、スライド可能な輸送制御904を使用して、予期される位置特定要素930の曲率の方向を判定することができる。例えば、位置特定要素930は、スライド可能な輸送制御904が配される組織位置特定装置900の側に向かって湾曲してもよい。スライド可能な輸送制御904は、他の方法で予期される位置特定要素930の曲率の方向を特定してもよい。
この方法2200はさらに、他方の手を使用して、組織の表面上に目標組織部位の近位に超音波トランスデューサ2302を位置決めすること(2206)を含み得る。例えば、図23Bを再び参照すると、超音波トランスデューサ2302は、目標組織部位2318の近位に組織2300の表面2316上に位置決めされる。超音波トランスデューサ2302は、組織位置特定装置900を組織2300内に挿入しつつ、組織表面2316上に位置決めされ得る。
この方法2200はさらに、位置特定要素930を輸送ニードル906から組織内に展開すること(2208)を含み得る。位置特定要素930は、組織位置特定装置900に沿って第1の長手方向にスライド可能な輸送制御904を押圧することによって展開し得る。例えば、図23Cにおいて、スライド可能な輸送制御904は、組織位置特定装置900に沿って第1の長手方向2320に(例えば、組織位置特定装置900の遠位端に向かって)押圧され、位置特定要素930を輸送ニードル906から展開する。他のバリエーションによると、位置特定要素930は、ノブを第1の回転方向に回す等、他の方法で展開され得る。位置特定要素930が展開されている間、超音波トランスデューサ2302を使用して、組織内の位置特定装置930の位置を視認し、位置特定装置930が展開され、目標組織部位に交差することなく、目標組織部位2318を包囲しているか、さもなけば特定していることを検証することができる。
この方法2200はさらに、ステップ2210において、位置特定要素930を展開しつつ、組織表面上で超音波トランスデューサ2302を動かすことを含み得る。超音波トランスデューサ2302は、表面を横切るように移動すること(例えば、表面と直角に残る)と超音波トランスデューサの軸(例えば、ヨー、ピッチ、又はロール回転)を含む、多数の異なる方法で、組織表面2316上で動かされ得る。図23Dは、位置特定要素930の展開と同時に、超音波トランスデューサ2302の横軸の周辺をピッチ回転2322で組織2300の表面2316上で移動される超音波トランスデューサ2302の一例を示している。図23Eは、図23Dに示されるピッチ回転2322の側面図を示す模式図である。ピッチ回転2322に超音波トランスデューサ2302を移動させることにより、例えば、位置特定要素930が超音波トランスデューサ2302によって検出可能な撮像ウィンドウから出た場合、又は目標組織部位2318が超音波トランスデューサ2302の当初の位置によって位置特定要素930の検出を部分的又は完全にわかりにくくする場合、位置特定要素930の位置がより良く視認化され得る。超音波トランスデューサ2302の他の動きは、同様に、要素が展開される際の位置特定要素930の視認化を改善してもよい。
位置特定要素930は、位置特定要素930が輸送ニードル906から完全に展開されるまで、超音波トランスデューサ2302が所望に合わせて移動されつつ、輸送ニードル906から展開を継続され得る。図23Fは、少なくとも部分的に目標組織部位2318を包囲するように展開された位置特定要素930の一例を示している。位置特定要素930の展開中、位置特定要素930は、例えば、ユーザが位置特定要素930の組織内での位置を変更することを望む場合、輸送ニードル906内に撤退され得る。位置特定要素930は、第1の長手方向2320と反対の第2の長手方向において(例えば、組織位置特定装置900の近位端に向かって)スライド可能な輸送制御904を動かすことによって撤退させられ得る。位置特定要素930は、他のバリエーションによると、第1の回転方向と反対の第2の回転方向にノブを回す等、他の機構によって撤退させられてもよい。位置特定要素930を撤退させることにより、ユーザに組織2300内での位置特定要素930の曲率の開始位置又は方向を調整させることができる。例えば、位置特定要素930が所望の進路とは異なる曲率進路に沿って展開しているとユーザが判定した場合、ユーザは、位置特定要素930を輸送ニードル906内に撤退させ、長手軸回りで組織位置特定装置900を回転させ、位置特定要素930の再展開を開始することができる。ユーザは代わりに、組織2300内でのニードル先端の位置を変化させることができる。輸送ニードル906からの完全な展開時、位置特定要素930は、組織位置特定装置900から自動的に係合解除又は取外しされてもよい。
この方法2200はさらに、ステップ2212において、輸送ニードル906を組織2300から除去し、位置特定要素930に連結されたトラッキングワイヤ932を露出させることを含んでもよい。図23Gは、輸送ニードル906が組織から除去された後の組織2300から伸びるトラッキングワイヤ932を示している。トラッキングワイヤ932は、巻き付けられるか、又は切断されて、患者の体に固定され得る。
図24A〜図24Gは、位置特定要素930のいくつかのバリエーションを示している。図24Aに示される通り、位置特定要素930は、略平滑な表面2410を有してもよい。例えば、表面2410は、電気化学研磨、電解質研磨、又は機械研磨によって研磨されてもよい。他のバリエーションによると、位置特定要素表面2410は、音波発生表面処理、又は超音波の下での視認化を改善するために位置特定要素930の音素発生を増加させる表面粗さを含んでもよい。図24Bは、サンドブラスト又はビーズブラスト等、位置特定要素930の摩耗ブラストによって達成される表目荒さ2412を示している。図24C〜図24Fは、レーザ切断、レーザエッチング、又はその他の表面切断機構によって位置特定要素表面2410に切り込まれたパターン2414の種々の例を示している。図24C〜図24Eは、パターン2414が位置特定要素930の外面に切り込まれ得ることを示しており、図24Fは、パターンが位置特定要素930の側に切り込まれ得ることを示している。パターン又は他の音波発生表面処理が代わりに位置特定要素930の内面に付与されるか、又は位置特定要素930の外側、側方縁部、及び内面の組み合わせに付与され得る。
図24C〜図24Eに示されるのとは異なるパターンが代わりに位置特定要素表面2410に切り込まれてもよく、ランダムなライン、ドット、又はその他の形状をパターン化された切り込みの代わりに使用し得る。例えば、ドットの格子を代わりに位置特定要素表面2410に切り込んでもよい。パターン又は形状は、位置特定要素930の厚さの0%から約25%の間の深さに切り込まれてもよい。位置特定要素表面2410への各切込みは、少なくとも幅が広くなるほど表面2410に深く入るか、又はその幅より大きな深さを有し得る。各切込みの幅は、例えば、約0.001〜0.006インチとすることができる。パターン2414又はランダムなライン、ドット、又はその他の構造が変わりに、位置特定要素表面2410から突出してもよい。
図24Gの例に示される通り、1つ以上の穴部2416が位置特定要素930を通じて(例えば、径方向において位置特定要素930の内面から外面まで)作成され得る。1つ以上の穴部2416は、図24Gの例に示される通り、位置特定要素930の遠位先端付近に作成(例えば、ドリル又はレーザ切断)されるか、又は位置特定要素930に沿った他の箇所に作成され得る。
図11A及び図11Bを参照して上述した通り、組織位置特定装置900は、組織位置特定装置900から位置特定要素930を展開することに加え、位置特定要素930を組織位置特定装置900内に撤退させ得るプッシャ要素920を含み得る。図25A及び図25Bは、組織位置特定装置900が、位置特定要素930を組織位置特定装置900から展開するものの、位置特定要素930を固体させない構成であるプッシャ要素2520を備え得ることを示している。図25Cは、輸送ニードル906内にある図25A及び図25Bに示される撤退不能なプッシャ要素2520の断面図を示している。図25Cに示される通り、プッシャ要素2520のの遠位終端は、位置特定要素930の近位終端2530に当接、接触、又は押圧され得る。スライド可能な輸送制御904を組織位置特定装置900の遠位端に向かって(例えば、図25Cの左側に向かって)スライドさせることにより、プッシャ要素2520に位置特定要素930の近位端2530を押圧させ、これによって位置特定要素930を輸送ニードル906から展開することができる。しかしながら、スライド可能な輸送制御904を組織位置特定装置900の近位端に向かって(例えば、図25Cの右側に向かって)スライドさせることにより、位置特定要素930を組織位置特定装置900内に撤退させるのに十分な力を位置特定要素930に付与することなく、プッシャ要素2520がもはや位置特定要素930に接触しなくなるまで、位置特定要素930の近位端2530から離間してプッシャ要素2520を撤退させることができる。プッシャ要素2520の遠位終端の面の形状は、位置特定要素930の近位終端2530の面の形状を逆にしたものであり得る。例えば、各面は、図25Cに示される通り、各長手軸に直角とし得る。
図26は、位置特定要素930が位置特定要素930から突出した1つ以上のかかり部2610を備え得ることを示している。かかり部2610は、位置特定要素930の撤退能力を限定するか、又は組織内に位置特定要素930を固定するのを助けることができる。かかり部2610は、位置特定要素930の一部又は全長から突出し得る。例えば、位置特定要素930は、近位端2530の角度2612内で、位置特定要素930の近位端2530付近に係り部2610を備え得る。角度2612は、位置特定要素930の展開構成の任意のパーセンテージであってもよい。角度2612は、位置特定要素930の展開構成の周辺の約10%〜25%の間であり得る。或いは、角度2612は、位置特定要素930の展開構成の100%までであり得る。図26は、位置特定要素930の外面から突出するかかり部2610を示しているが、追加又は代替として、かかり部は、位置特定要素930の側方縁部又は内面から突出し得る。
図26に示されるかかり部2610は、かかり部2610のうちの1つ以上が患者の組織に入った後、位置特定要素930の撤退に対する抵抗を付与し得る。例えば、位置特定要素930は、遠位部分が患者の組織内に展開され、近位端が組織位置特定装置900の輸送ニードル906内に維持される間に撤退可能であってもよい。しかしながら、位置特定要素930は、かかり部2610を含む位置特定要素930の一部が組織内に展開された後に、撤退可能でないか、又は撤退能力が限定されてもよい。
図12に示される通り、組織位置特定装置900は、プッシャ要素920の少なくとも一部を取り囲むか、又は包囲するポリマライナ1200を備え得る。図27は、組織位置特定装置900がステンレススチールライナ2700を備え得ることを示している。組織位置特定装置900の他の態様は、図9及び図12を参照して説明した態様と同様であり得る。ステンレススチールライナ2700は、径方向において位置特定要素930の少なくとも一部と輸送ニードル906のニードル管腔との間であり得る。例えば、ステンレススチールライナ2700は、中空管腔を有する略円筒のチューブであり、位置特定要素930の少なくとも一部を径方向に包囲し得る。ステンレススチールライナ2700はまた任意で、プッシャ要素920の少なくとも一部を径方向に包囲することができる。引いては、組織位置特定装置900の輸送ニードル906は、ステンレススチールライナ2700及びプッシャ要素920の少なくとも一部を径方向に包囲することができる。
ステンレススチールライナ2700は、プッシャ要素920が輸送ニードル906を通じて長手方向に移動される際、プッシャ要素の外面と輸送ニードル906との間に接触が生じないように、プッシャ要素920を完全に取り囲むか、又は径方向に包囲し得る。他のバリエーションによると、ライナ2700は、プッシャ要素920又は位置特定要素930の背面側を被覆することにより、プッシャ要素920及び位置特定要素930が長手方向に移動されるとき、プッシャ前面側又は位置特定要素前面側が輸送ニードル906の内側前面と接触するのを限定することができる。ライナ2700は、プッシャ要素920又は位置特定要素930の背面側を被覆することにより、プッシャ要素920及び位置特定要素930が長手方向に移動される際、プッシャ背面側又は位置特定要素背面側が輸送ニードル906の内側背面に接触するのを限定することができる。
ステンレススチールライナ2700は、輸送ニードル906内でスライド可能に移動可能であり得る。ステンレススチールライナ2700及びプッシャ要素920は、スライド可能な輸送制御904に連結されることにより、第1の長手方向における(例えば、輸送ニードル906の遠位端に向かう)スライド可能な輸送制御904の移動でステンレススチールライナ2700及び位置特定要素930が輸送ニードル906の遠位端に向かって移動するようにする。ライナ2700は、プッシャ要素920からの位置特定要素930の解放を収容できる。例えば、位置特定要素930は、プッシャ要素920の遠位端がライナを超えて長手方向に移動されるとき、ライナから解放可能であり得る。ライナ2700は、約0.002〜0.004インチの壁部厚さを有し得る。
組織位置特定装置900はさらに、ばね2710を備え得る。ばね2710は、ステンレススチールライナ2700の近位端に連結され、ばね2710の遠位端2712は、ライナ2700を押したり引っ張ったりすることにより、スライド可能な輸送制御904の長手方向の移動に応じて、輸送ニードル906を通じて長手方向に移動させることができる。ばね2710は、ばね2710の遠位端2712が組織位置特定装置ハンドル902の遠位端2714に接触するとき、スライド可能な輸送制御904の遠位の移動に応じて、圧縮するように構成される。ばね2710が圧縮する間、ばね2710は、ステンレススチールライナ2700の移動を停止させ、プッシャ要素906がライナ2700に対して移動できるようにする。従って、ばね2710が圧縮されない間、プッシャ要素920及びステンレススチールライナ2700は、スライド可能な輸送制御904の遠位の移動に応じて、ともに輸送ニードル906の遠位端に向かって移動するように構成され得る。しかしながら、ばね2710が少なくとも部分的に加圧される間、プッシャ要素920は、スライド可能な輸送制御904の遠位の移動に応じて、ライナ2700に対して輸送ニードル906の遠位端に向かって移動するように構成され得る。
図28Aは、ばね2710の加圧前におけるステンレススチールライナ2700とばね2710との例を示しており、図28Bは、ライナ2700に対するプッシャ要素920の移動を生じるばね2710の部分的加圧を示している。図28Aに示される通り、ばね2710は、スライド可能な輸送制御904の動きの範囲の一部を通じて、ハンドル遠位端2714と接触しないように、十分短くてもよい。動きの範囲のその部分においてスライド可能な輸送制御904をスライドさせることにより、引いてはハンドル902及びニードル906を通じてばね2710及びライナ2700も移動させて良い。図28Bは、組織位置特定装置ハンドル902の遠位端2714に接触しているばね2710の遠位端2712を示している。ハンドル遠位端2714は、ばね2710より小さな直径を有し、ばね遠位端2712の移動を停止することができる。或いは、ハンドル902は、ハンドル遠位端2714に遮断機構又はその他の機構を備え、組織位置特定装置900の遠位端に向かうばね遠位端2712の移動を防いでもよい。ばね遠位端2712がハンドル遠位端2714と接触するとき、スライド可能な輸送制御904のさらに遠位の移動により、ばね2710を加圧することができる。
ステンレススチールライナ2700がばね2710に連結されるため、ライナ2700は、ばね2710が少なくとも部分的に加圧されている間、輸送ニードル906を通じて移動しなくてもよい。しかしながら、スライド可能な輸送制御904の遠位の移動は、ばね2710が加圧され始めた後であっても、輸送ニードル906の遠位端に向かってプッシャ要素920の押圧を継続してもよい。従って、プッシャ要素920は、ばね2710が少なくとも部分的に加圧される間、ライナ2700に対して移動され得る。図28Bに示される通り、プッシャ要素920の一部は、ライナ2700から押圧され、プッシャ要素920の遠位端2716を露出させる。例えば、ライナ2700に対するプッシャ要素920の相対的移動により、位置特定要素930(図28Bには図示せず)がプッシャ要素920接触可能な接続点2802を露出することができる。接続点2802を露出することにより、位置特定要素930がプッシャ要素920から解放可能とする。
ライナ2700は、プッシャ要素920と位置特定要素930との間の少なくとも接続点2802を包囲し得る。接続点2802と位置特定要素930の少なくとも一部とをライナ2700で包囲することにより、接続点2802、位置特定要素930、及び輸送ニードル906の間の摩擦を低減し得る。とくに、位置特定要素930内のばね力は、湾曲構成の輸送ニードル906から展開するように構成され得るが、輸送ニードル906の内面に対して位置特定要素930の近位端を押圧し得る。接続点2802は、輸送ニードル906に対する摩擦をさらに増加させ得る不規則形状の表面を有してもよい。少なくとも位置特定要素930の近位端と接続点2802とをステンレススチールライナ2700で包囲することにより、ばね力が輸送ニードル906の内面でなく、ライナ2700に対して近位端を押圧し得る。従って、輸送ニードル906の内面は、輸送ニードル906の内面に対してスライドする位置特定要素930及びプッシャ要素920からの潜在的なダメージから保護され、位置特定要素930の展開に抵抗する摩擦が低減され得る。ライナ2700は、近位端よりも位置特定要素930の多くの部分を包囲してもよく、例えば、ライナ2700は、展開前の位置特定要素930全体まで包囲してもよい。
ばね2710の長さは、ステンレススチールライナ2700に包囲された位置特定要素930の量に基づく。特に、ばね2710の加圧時の長さと非加圧時の長さとの間の差異は少なくとも、位置特定要素930と、ライナ2700内に包囲されるプッシャ要素920との接続点2802との長さであり得る。或いは、プッシャ要素920の代わりに図25A〜図25Cを参照して説明したプッシャ要素2520を使用するバリエーションによると、ばねの加圧時の長さと非加圧時の長さとの際は、ライナ2700に包囲された位置特定要素930の長さより大きいか、又は小さくてもよい。
組織位置特定装置900は、位置特定要素930が完全に展開された後のプッシャ要素920のステンレススチールライナ2700内への撤退を防止又は限定する撤退ロックが供えられ得る。プッシャ要素920の撤退を限定することにより、位置特定要素930の展開後の組織位置特定装置900の安全を改善し得る。例えば、プッシャ要素920が撤退される際、患者の組織がプッシャ要素920とライナ2700又は輸送ニードル906との間に挟まれることがあり、撤退を防止又は限定することにより、患者の組織を挟む確率を低減することができる。さらに、例えば、図28Bに示される通り、位置特定要素930の完全な展開後、プッシャ要素920が輸送ニードル906の一端を超えて伸びてもよいため、プッシャ要素920は、追加又は代替として、輸送ニードル906の先端を遮蔽して、先端が組織から引き出された後、露出した組織位置特定装置900のユーザが露出した鋭利なニードル先端で自身又は他者に傷害を負わす確率を低減することができる。
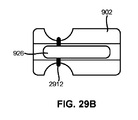
図29A〜図29Jは、撤退ロックがプッシャ要素920の撤退を限定し得ることを示している。図29A及び図29Bは、組織位置特定装置ハンドル902とプッシャプラグ926との上面断面図を示す。図9を参照して上述した通り、プッシャプラグ926は、スライド可能な輸送制御904とプッシャ要素920とに連結され、スライド可能な輸送制御904のプッシャ要素920への長手方向の動きを伝え得る。図29A及び図29Bの例を参照すると、プッシャプラグ926は、(図29Aに示される通り)ハンドル902の管腔内に加圧され得る1つ以上のばね搭載ピン2912を備え、図29Bに示される通り、プッシャプラグ926がハンドル902内の指定位置に達した時、穴部2910内に移動するか、又は飛び込み得る。例えば、穴部2910は、位置特定要素930が完全に展開され、プッシャ要素920から分離されたとき、ピン2912が穴部2910内に飛び込むように配置され得る。穴部2910は、位置特定要素930がプッシャ要素920から分離する点を超えてスライド可能な輸送制御904が押圧されるとき、ピン2912が穴部内に飛び込むように配置され得る。ばね搭載ピン2912は、横方向の移動が限定されており、ピン2912が穴部2910内に係止した後にスライド可能な輸送制御904が移動され得る長手方向の距離を限定してもよい。ばね搭載ピン2912は、穴部2910内に係止した後にハンドル902の管腔内にスライドして戻るように加圧可能であり、スライド可能な輸送制御の移動とプッシャ要素920の撤退とを許容してもよい。
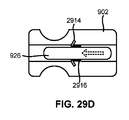
図29C〜図29Fは、撤退ロックの他の例の上面断面図である。図29C〜図29Fの例において、1つ以上の歯2916がプッシャプラグ926に連結され、1つ以上のロック2914がハンドル902管腔の内面上に配され得る。ロック2914は、ばね搭載又はヒンジ可動とされ、遠位方向(例えば、図29Cの左への)は2916及びプッシャプラグ926の自在な移動を許容し得る。図29D及び図29Eは、遠位方向への歯2916の移動を許容するロック2914の前進回転を示している。図29Fに示される通り、歯2916が歯の遠位側に移動した後、ロック2914は、回転して初期位置に戻り、組織位置特定装置900の近位端に向かう(例えば、図29Dの右への)プッシャプラグ926の移動を防止又は限定してもよい。ロック2914は、位置特定要素930が完全に展開される点にて、又はこの点を超えて、歯2916がロック2914の遠位となるように、ハンドル902内に位置決めされ手もよい。歯2916の代わりのバリエーションとして、プッシャプラグ926が組織位置特定装置ハンドル902内の指定位置に向かて前方に移動されるとき、穴部内に係止し得る。穴部内に係止されるときの1つ以上の歯2916は、スライド可能な輸送制御904の近位の移動を限定し得る。
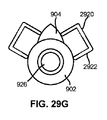
図29G〜図29Jは、撤退ロック2920の使用方法を示している。図29Gは、撤退ロック2920を含む組織位置特定装置ハンドル902の横断面図であり、図29Hは、撤退ロック2920を含む組織位置特定装置900の側面図である。撤退ロック2920は、ハンドル902の外部にあり、ハンドル902又はスライド可能な輸送制御904に連結された構造であり得る。撤退ロック2920は、金属(例えば、ワイヤ形態等)から製造されるか、又はポリマとして(例えば、成形により)製造され得る。撤退ロック2920は、位置特定要素930が組織内に展開されたとき、又は位置特定要素930が組織内に展開された後、スライド可能な輸送制御904の位置を係止するように構成された1つ以上のアーム2922を有し得る。撤退ロック2920は、スライド可能な輸送制御904に対して回転可能に連結され、及び/又は、アーム2922は、図29G及び図29Hに示される付勢された非係止構成から図29I及び図29Jに示される弛緩した又は付勢されていない係止構成に弾性変形可能である。アーム2922は、矢印2925で示される通り、係止構成に弾性的に飛び込み、及び/又は、係止構成に回転し得る。アーム2922は、スライド可能な輸送制御902の長手方向の動きの間、ハンドル902の外側に沿ってスライドし、回転して、ハンドル902内の穴部2924を通じてハンドル902又はプッシャプラグ926内に係止し得る。図29Iは、穴部2924内に係止されることにより、スライド可能な輸送制御904の動きを係止することのできるアーム2922を示す横断面図であり、図29Jは、穴部2924内に係止され得るアーム2922を備えた組織位置特定装置900の側面図である。撤退ロック2920は、アーム2922が穴部2924内に自動的に飛び込むことができるように搭載されたばねであるか、又は撤退ロック2920は、装置900のユーザにより手動で穴部2924内に締め付けられるように構成され得る。
上述の通り、組織位置特定装置900は、超音波トランスデューサとともに使用され得る。ユーザは、片手で組織位置特定装置900を操作し、他方の手で超音波トランスデューサを操作し、超音波トランスデューサを使用して位置特定要素930の組織内への展開をモニタすることができる。
ユーザは、X線を使用して、位置特定要素930の所望の展開を確認してもよい。X線モニタリング下で組織位置特定装置900を使用する例が図30A及び図30Bに示されている。図30Aは、バッキ3010と支持基台3020とを備えるマンモグラフィX線セットアップの上面図である。図30Bは、図30Aに示されるセットアップの側面図を示している。
図30A及び図30Bを参照すると、バッキ3010は、X線撮像を行うために組織2300を支持し得る。バッキ3010は、X線を送達するX線チューブから組織2300まで、組織2300の反対側に搭載され得る。例えば、図30Aにおいて、バッキ3010は、組織2300の下方であり、X線チューブ(図示せず)の下方に搭載され得る。バッキ3010は代わりに、垂直方向に配列され、組織2300が撮像のためにX線チューブとバッキ3010との間で水平方向に搭載されてもよい。
支持基台3020は、バッキ3010に連結し、組織位置特定装置900を支持し得る。支持基台3020は、バッキ3010に締め付けられるか、バッキ3010上の接着剤に接着するか、バッキ3010のブラケット内に係止するか、さもなければバッキ3010に対して脱着可能に連結し得る。或いは、支持基台3020は、バッキ3010と一体化され得る。いくつかのバリエーションによると、支持基台3020は、異なる組織サイズ又は組織への異なる進入角度に対応するように調整可能であってもよい。例えば、支持基台3020は、ヒンジ可動とされることにより、バッキ3010の水平面からの角度で組織位置特定装置900を傾斜させるか、又は水平面内で旋回してもよい。支持基台3020は、追加又は代替として、組織位置特定装置900のニードルとバッキ3010との間の距離を調整するために調製可能な高さを有してもよい。基台3020はさらに、組織位置特定装置900の位置を維持する支持部を備えてもよい。例えば、基台3020は、組織位置特定装置900を基台3020にストラップ固定するストラップか、組織位置特定装置900の側方及び端部に搭載された突出構造を備え、装置900が基台3020上で転がるか、又はスライドする確率を低減してもよい。
図30A及び図30Bに示される通り、ユーザ(例えば、放射線科医)は、関心対象組織2300がバッキ3010とX線チューブとの間に配置されるように患者が位置決めされるまで、患者を案内してもよい。組織2300内の目標組織部位を特定するための組織2300の初期X線撮像の後、ユーザは、組織位置特定装置900のニードルを組織2300内に案内し、位置特定要素930を組織内に展開してもよい。組織内での位置特定要素930の位置決めを確実に正確に行うために、ユーザは、位置特定要素930の展開前、展開中、又は展開後に、組織2300のX線撮像を反復してもよい。ユーザは、自らのX線への露出を低減するために、撮像中は患者のそばを離れることもある。従って、支持基台3020は、ユーザがいない場合に組織位置特定装置900を支持し、撮像中に装置と位置特定要素930の位置決めを維持し、患者の快適さを向上することができる。位置特定要素930がユーザの満足するように展開された後、ユーザは、上述の通り、組織2300から組織位置特定装置900を引っ張ってトラッキングワイヤ932を露出させることができる。
図31A及び図31Bは、組織位置特定ワイヤ3100を使用して、位置特定要素930及びトラッキングワイヤ932がなくても(図スの通り)又はあっても、組織の位置特定を行うことができる。組織位置特定ワイヤ3100は、組織位置特定装置100又は900で説明したのと同様のハンドル/プッシャ/スライド可能な輸送制御を基本とするニードルシステムから展開されるか、又は輸送ニードルを直接通じて(例えば、プッシャ要素920及び/又はスライド可能な輸送制御904を使用することなく)手動で前進させられるように構成され得る。
組織位置特定ワイヤ3100は、位置特定要素3130と、トラッキングワイヤ3132とを備え得る。位置特定要素3130は、可撓性ワイヤ、又は金属、ポリマの長さ、又はこれらの組み合わせであり得る。位置特定要素3130は、組織内への展開時、円弧状又は曲線状の構成を採るように構成され得るが、この例を図31Aに示している。或いは、位置特定要素3130は、例えば、図31Bに示される通り、展開時に線形構成又は屈曲構成を採るように構成され得る。位置特定要素3130は代わりに、異なる形状を採り得る。位置特定要素3130は、患者の組織を穿刺して、患者が動く際に組織内の相対的な位置を維持するのに十分な剛性を有するものの、展開に先立って輸送ニードル(例えば、組織位置特定装置900の輸送ニードル)内に折り畳まれるのに十分な可撓性を有する。
可撓性の高い縫合様トラッキングワイヤ3132は、位置特定要素3130に連結され、輸送ニードルからのトラッキングワイヤ3132の展開を補助するように構成され得る。例えば、組織位置特定ワイヤ3100が輸送ニードルから手動展開するように構成された場合、トラッキングワイヤ3132は、トラッキングワイヤ3132が押圧されたとき、位置特定要素3130を輸送ニードルから押圧するように構成され得る。位置特定要素3130が患者の組織内に展開された後、トラッキングワイヤ3132の少なくとも一部は、組織から伸び、執刀医を目標組織部位に案内する進路又は痕跡としての役割を果たしてもよい。トラッキングワイヤ3132の露出部分は、包まれるか又は結び付けられて、例えば接着着衣によって皮膚の表面に固定されるように構成され得るのに十分な可撓性を備える。例えば、トラッキングワイヤ3132の露出部分は、直径約1〜5cmの円に包まれ、手術用テープで患者に貼付されてもよい。
トラッキングワイヤ3132は、ポリマ外被1132等のポリマ外被に包まれた1つ以上の多重より線フィラメントを含む可撓性ワイヤであり得る。しかしながら、トラッキングワイヤ3132は代わりに、任意の金属、合金、ポリマ、又はこれらの組み合わせを含み、外被に包まれるか、又は外被に包まれないか、又はポリマ(例えば、フルオロポリマ)が塗布された、心血管への適用に使用される可撓性案内ワイヤと同様の単一より線ワイヤ、多重より線ワイヤ、コイルばねであり得る。トラッキングワイヤ3132は、略円形の断面を有するか、又は他の形状(例えば、四角形)の断面を有し得る。トラッキングワイヤ3132は、輸送ニードルの端部からの位置特定要素3130の展開(例えば、押圧による)を促進するのに十分なカラム強度を有することができるが、患者の組織表面に快適に固定されるように、降伏することなく容易に巻き付けられる十分な可撓性を有する。トラッキングワイヤ3132は、直径が約0.010〜0.025インチの間であってもよい。トラッキングワイヤ3132が輸送ニードルを通じて手で押圧されるように構成されるとき、トラッキングワイヤ3132は、ニードル管腔内での座屈又は「S」字化を防ぐのに十分に大きな直径及び/又は十分なカラム強度を有してもよい。トラッキングワイヤは、図31A及び図31Bに示されるものより長くても、又は短くてもよい。
脂肪に置き換わった胸部の場合等、特に組織が可動又は不安定であるため、ワイヤを用いた位置特定処置又はその他の超音波ガイドによる胸部処置を実施するのが困難になり得る。脂肪組織の不安定さ及び可動性により、熟練の臨床医であっても、所望の箇所に超音波ガイドニードルを装着するのは難解となり得る。目標組織付近の皮膚上で超音波を優しく押圧するだけの行為により、目標組織を超音波トランスデューサの視野から外れるようにし得る。この組織を通じてニードルを装着及び進行させる際に関与する力により、さらに望ましくない組織の可動性を生じ、さらに超音波による視認化を損ない得る。
図32Aは、組織位置特定装置900又は100によって貫通され、超音波プローブによって撮像される組織の安定化のための、固定又は安定化スリング3200等、組織安定化装置を示している。スリング3200は、胸部組織を安定化し、組織位置特定装置900又は100の輸送ニードル906又はその他の超音波ガイド装置(例えば、経皮針生検、細針生検、及び経皮マーカ装置)のように、このような組織を支持し得る。スリング3200は、可動組織を安定化させることができ、リアルタイムの超音波ガイダンスのため、超音波プローブの位置決めに加え、ニードルの貫通を可能にする。
スリング3200は、ポリマ材料、織物、又はこれらの組み合わせを含み得る。スリング3200は、ヨードフォア含浸層又はコーティング(例えば、3M(登録商標)Ioban(登録商標)切開ドレープ又は被膜)を含み、例えば、皮膚を被覆して手術部位の感染リスクを最少化することができる。スリング3200は、例えば、ヨードアレルギーのある患者のために、ヨードを含有しない抗菌層を含み得る。抗菌層は、銀のナノ粒子を含み得る。スリング3200(又は本明細書に記載の他の安定化装置)を使用して、胸部組織(上述した通り)、腹部組織、脚部組織、上腕組織、臀部組織、又は陰嚢組織等を含むがこれに限定されるものでない可動組織を支持することができる。スリング3200は、皮膚に接着して適切な超音波インタフェースと、組織上での牽引力を維持して組織の可動性を低減する、皮膚上でのグリップとを提供する、1つ以上の生体適合性裏面粘着層を備え得る。
スリング3200は、胸部表面に対する支持圧力3202を送達し得る。支持圧力3200は、スリングの着用者の中間方向に向かった方向性構成要素を有し得る。組織位置特定装置900又は100は、矢印3204に示される通り、スリングを通じて内側へ(図示の通り)でも又はスリングを通じてでもなく、胸部内へと挿入可能である。組織位置特定装置の挿入方向は、スリングの着用者の横側に向かう方向性構成要素を有し得る。支持圧力3200により、挿入中及びその他の胸部内における組織位置特定装置900又は100の使用中の胸部の動き又は変形を防止又は最小化することができる。
図32Bは、パッチ3206が胸部の、例えば、組織位置特定装置900又は100の皮膚を通じた挿入部位等に装着可能であることを示している。パッチ3206は、パッチ3206及び胸部皮膚を通じた組織位置特定装置3200の挿入に先だって、胸部に装着可能である。パッチ3206は、スリング3200の上方又は下方であり得る。パッチ3206は、スリング3200に貼付され得る。パッチ3206は、スリング3200と同一又は異なる材料で作成され得る。パッチ3206は、例えば、皮膚を被覆し、手術部位の感染のリスクを最少化するため、1つ以上のヨードフォア含浸層又はコーティング(例えば、3M(登録商標)Ioban(登録商標)切開ドレープ又は被膜)を有し得る。
組織安定化装置は、貝殻の一方側が剛性面を有し、貝殻の他方側が2つの突起物間のIoban(登録商標)等、可撓性接着ポリマシーティングのセグメントを吊るしたヨーク(例えば、2つの突起物)からなる貝殻型装置からなり得る。貝殻のヒンジは、ばね搭載されて貝殻を「閉じ」てもよく、及び/又は、調整可能な(例えば、ラチェットのラチェッティング又は解放による)加圧レベルで胸部組織の周辺で閉鎖された貝殻を保持する解放可能なラチェッティング機構を有してもよい。貝殻は、胸部の周辺で閉鎖可能である。貝殻の剛性側の内面は、患者の胸部に接触し、胸部が貝殻の反対側によってさらに安定化され得る安定的な基台を形成し得る。貝殻の対向面は、胸部組織が貝殻装置間の間で穏やかに加圧され得るように、内面が胸部に対して押圧される裏面粘着ポリマシーティングからなってもよい。貝殻は、臨床医による多数の所望の方向(例えば、頭尾、内外等)に胸部に適用され得る。剛性貝殻は、加圧中の快適さを支援するパッド(例えば、発泡)を有するように構成され得る。貝殻が胸部に適用された後、超音波プローブ及びニードルは、露出された皮膚又は安定化装置の接着膜領域のいずれかの内部又は上部に搭載されてもよい。
2つの対向側が上述の貝殻構成のようにヒンジ可動でないものとされ得る。例えば、胸部周辺で所望の加圧レベルが達成されるまで、2つのほぼ平行な面が1つ以上のラチェット又はスクリュー供給機構を介して各々に向かって前進され得る。上述の貝殻装置のように、対向加圧面がヨークの突起によって吊り下げられた可撓性膜からなり、1つの加圧面が比較的剛性であり得る。剛性側が平坦面である必要はないものの、湾曲(例えば、僅かな窪み)であってさらなる快適さと安定性を提供することができる。使用中、2つの対向側がともに胸部周辺で所望の向きにされ得るため、超音波ガイドによる経皮的処置における使用のために安定化される。処置の最後に、安定化装置が解放されて、膜が取り除かれ得る。
膜領域は、加圧面全体を含む必要がない。両側が剛性であり、加圧面内に窓部領域が設けられ得る。窓部領域は、窓部サイズに応じた膜のシーティングを含んでもよく、又は含まなくてもよい。いくつかの例においては、加圧面内の窓部が必要とされず(例えば、ある程度胸部の大きな患者)、皮膚は加圧面のない領域に十分にアクセス可能である。双方の加圧側は、膜ヨークからなり、ニードル又は超音波プローブへの胸部のアクセス能力を最適化し得る。
本明細書に記載及び図示された個別のバリエーションは各々、他のバリエーションのいくつかの特徴から放射状に分離するか、又はこれと組み合わせられてもよい具体的な構成要素及び特徴を有する。特定の状況、材料、物質の組成、プロセス、目標へのプロセス行為又はステップ、本開示の精神又は範囲を適合させるために、修正が加えられてもよい。
本明細書に引用した方法は、引用された事象の順と同様に、引用された事象の論理的に可能な任意の順で実施されてもよい。さらにこの方法又は動作に追加の要素が設けられてもよく、又は方法又は動作の要素をなくして所望の結果を達成してもよい。
さらに、値の範囲が与えられる場合、その範囲の上限と下限の途中のすべての値と、言及された範囲内で言及された又は途中の他の任意の値とが、本開示の範囲に網羅される。また説明した発明のバリエーションの任意の選択的特徴は、独立して記載及び主張されてもよく、又は本明細書において説明した特徴のうちの任意の1つ以上と組み合わせて記載及び主張されてもよい。
本明細書において言及した既存の主題はすべて(例えば、出版物、特許、特許出願、及びハードウェア)は、その主題が本出願の主題と矛盾しない限り(その場合、本明細書に記載の内容が優先されなければならない)、その内容全体を参照としてここに援用する。参照した事項は、唯一本出願の提出日に先立って開示されたという理由のために提供されたものである。本明細書のいずれの内容も、本開示が先行技術の開示のためにこのような資料に先立って権利付与されなかったことを認めるものと理解されてはならない。
単数形での項目の参照は、同一の項目が複数存在する可能性も含んでいる。より具体的には、本明細書及び添付のクレームで使用される単数形の不定冠詞又は定冠詞は、文脈上明確に否定をしていない限り、複数の参照物も含む。さらに、クレームは任意の選択的要素を除外して書かれてもよいことに留意しなければならない。このように、本言及は、クレーム要素の参照又は「否定的」限定の使用とともに「唯一」、「のみ」、及び同様の排他的な用語の使用の前提となることが意図されている。規定のない限り、本明細書において使用されるすべての技術的且つ科学的用語は、本開示の属する分野の当業者によって一般的に理解されるのと同一の意味を有する。
本開示は、記載の特定の形態の範囲に限定されることを意図されるものでなく、バリエーション又は本明細書に記載のバリエーションの代替、修正、及び同等物を網羅することが意図される。さらに、本開示の範囲は、当業者が本開示を考慮した上で明らかとなる他のバリエーションも完全に包含するものである。
Claims (180)
- 組織位置特定装置であって、
スライド可能な輸送制御を備えるハンドルと、
前記ハンドルから伸び、ニードル管腔を備える輸送ニードルと、
部分的に前記ニードル管腔内に設けられるプッシャ要素と、
前記ニードル管腔内にあるとき、前記プッシャ要素によって取外し可能に保持され、少なくともその一部分が、前記スライド可能な輸送制御の第1の長手方向への移動に応じて輸送ニードルを出るように構成された位置特定要素と、
前記プッシャ要素を部分的に収容し、前記プッシャ要素の一部と前記ニードル管腔との間に位置決めされるライナとを備え、前記位置特定要素の一部は、前記プッシャ要素と前記ライナとによって収容される装置。 - 前記ライナは、金属材料を備える請求項1に記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項1又は2のいずれかに記載の装置。 - 前記トラッキングワイヤの少なくとも一部は、ポリマ外被によって被覆される請求項3に記載の装置。
- 前記スライド可能な輸送制御は、第1の界面及び第2の界面を備え、前記ハンドルは、近位端及び遠位端を備え、前記第1の界面は、前記近位端から前記遠位端まで見たとき、上方に凹んでおり、前記第2の界面は、前記遠位端から前記近位端まで見たとき、上方に凹んでいる請求項1〜4のいずれかに記載の装置。
- 前記ハンドルは、ハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項1〜5のいずれかに記載の装置。
- 前記ハンドルは、前記ハンドル背面側に沿った長尺スロットを有し、前記スライド可能な輸送制御は、前記長尺スロットを通じて伸びるファスナを介して前記プッシャ要素に連結される請求項6に記載の装置。
- 前記プッシャ要素は、前記プッシャ要素の遠位端に輸送ポートを備え、前記位置特定要素の少なくとも一部は、前記位置特定要素が前記ニードル管腔内にあるとき、前記輸送ポート内に取外し可能に保持される請求項1〜7のいずれかに記載の装置。
- 前記プッシャ要素は、プッシャ背面側、プッシャ前面側、及びプッシャ遠位端を有し、前記プッシャ遠位端は、傾斜しており、前記プッシャ前面側と鈍角を形成する請求項1〜8のいずれかに記載の装置。
- 前記位置特定要素は、音波発生表面処理を備える請求項1〜9のいずれかに記載の装置。
- 前記ライナの近位端に連結されたばねをさらに備え、
前記ばねは、前記プッシャ要素が前記スライド可能な輸送制御の前記第1の長手方向への移動に応じて前記ライナに対して前記輸送ニードの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成される請求項1〜10のいずれかに記載の装置。 - 組織位置特定装置であって、
輸送制御を備えるハンドルと、
前記ハンドルから伸び、ニードル管腔を備える輸送ニードルと、
前記ニードル管腔内においてスライド可能に移動するように構成され、前記輸送制御に連結され、輸送ポートを備えるプッシャ要素と、
前記プッシャ要素の少なくとも一部が前記ニードル管腔内にあるとき、前記プッシャ要素の前記輸送ポートと連動するように構成されて、前記輸送ポートが前記ニードル管腔を出るとき、前記輸送ポートから解放されるように構成される連動フレームワークを備える位置特定要素とを備える装置。 - 前記位置特定要素の前記連動フレームワークは、小穴フレームと肩部とを備え、前記小穴フレームは、前記位置特定要素が前記ニードル管腔内にあるとき、前記輸送ポート内に取外し可能に位置決めされる請求項12に記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項12又は13のいずれかに記載の装置。 - 前記ハンドルは、ハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項12〜14のいずれかに記載の装置。
- 組織位置特定装置を使用した組織の位置特定方法であって、
前記組織位置特定装置の輸送ニードルのニードル先端を組織内の前記組織の目標組織部位付近のオフセット位置に進行させることと、
前記組織の組織表面上の前記目標組織部位の近位に超音波トランスデューサを位置決めすることと、
音波発生表面処理を備えた位置特定要素を前記輸送ニードルから前記組織内に展開することと、
前記位置特定要素を展開しつつ、前記組織表面上で前記超音波トランスデューサを移動させることとを備える方法。 - 前記位置特定要素を前記輸送ニードルから前記組織内に展開することは、前記組織位置特定装置のハンドルに沿った第1の長手方向にスライド可能な輸送制御を押圧することを備える請求項16に記載の方法。
- 前記位置特定要素を前記輸送ニードルから展開するのに先立ち、前記スライド可能な輸送制御に連結されたプッシャ要素を部分的に収容するライナの近位端に連結されたばねを加圧することをさらに備える請求項16又は17のいずれかに記載の方法。
- 前記位置特定要素の少なくとも一部を前記輸送ニードルから展開した後、前記位置特定要素を前記輸送ニードル内に撤退させることをさらに備える請求項16〜18のいずれかに記載の方法。
- 前記位置特定要素を前記輸送ニードルから湾曲構成に展開することをさらに備え、前記湾曲構成は、前記目標組織部位の少なくとも一部を放射状に包囲する請求項16〜19のいずれかに記載の方法。
- 組織位置特定装置であって、
スライド可能な輸送制御を備えたハンドルと、
前記ハンドルから伸び、ニードル管腔を備えた輸送ニードルと、
部分的に前記ニードル管腔内に設けられるプッシャ要素とを備え、
前記輸送ニードルは、面取り遠位端を有し、
前記面取り遠位端は、ニードル先端、鋭利な縁部、及び丸められた縁部を有し、
前記ニードル管腔内にあるとき、前記プッシャ要素によって取外し可能に保持され、少なくともその一部が、スライド可能な輸送制御の第1の長手方向への移動に応じて前記輸送ニードルの前記面取り遠位端を出るように構成された位置特定要素を備える装置。 - 前記プッシャ要素の一部と前記ニードル管腔との間に位置決めされたライナをさらに備える請求項21に記載の装置。
- 前記ライナは、金属材料を備える請求項22に記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項21〜23のいずれかに記載の装置。
- 前記トラッキングワイヤの少なくとも一部は、ポリマ外被で被覆される請求項24に記載の装置。
- 前記トラッキングワイヤの少なくとも一部は、前記位置特定要素と前記トラッキングワイヤの少なくとも一部が展開されたとき、前記位置特定要素によって形成される曲線に対して割線を配列するように構成される請求項24に記載の装置。
- 前記トラッキングワイヤは、前記位置特定要素の中間点と終点との間の点において前記位置特定要素に連結される請求項24に記載の装置。
- 前記ライナの近位端に連結されたばねをさらに備え、前記ばねは、前記プッシャ要素が前記スライド可能な輸送制御の前記第1の長手方向への移動に応じて前記ライナに対して前記輸送ニードの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成される請求項21〜27のいずれかに記載の装置。
- 前記スライド可能な輸送制御は、第1の界面及び第2の界面を備え、前記ハンドルは、近位端及び遠位端を備え、前記第1の界面は、前記近位端から前記遠位端まで見たとき、上方に凹んでおり、前記第2の界面は、前記遠位端から前記近位端まで見たとき、上方に凹んでいる請求項21〜28のいずれかに記載の装置。
- 前記ハンドルは、ハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項21〜29のいずれかに記載の装置。
- 前記ハンドルは、前記ハンドル背面側に沿った長尺スロットを有し、前記スライド可能な輸送制御は、前記長尺スロットを通じて伸びるファスナを介して前記プッシャ要素に連結される請求項30に記載の装置。
- 前記プッシャ要素は、輸送ポートを備え、前記位置特定要素の少なくとも一部は、前記輸送ポート内に取外し可能に保持され、前記位置特定要素は、前記輸送ポートの少なくとも一部が前記輸送ニードルから移動するとき、前記プッシャ要素から自動的に取り外されるように構成される請求項21〜31のいずれかに記載の装置。
- 前記輸送ポートは、遠位ポート側、近位ポート側、及びポート基部を有し、前記遠位ポート側は、前記組織位置特定装置の横側から見たとき、前記ポート基部と鋭角を形成する請求項32に記載の装置。
- 前記プッシャ要素は、プッシャ背面側、プッシャ前面側、及びプッシャ遠位端を有し、前記プッシャ遠位端は、傾斜しており、前記プッシャ前面側と鈍角を形成する請求項21〜33のいずれかに記載の装置。
- 前記プッシャ遠位端は、前記組織位置特定装置の横側から見たとき、前記プッシャ背面側と鋭角を形成する請求項34に記載の装置。
- 前記位置特定要素は、小穴フレームと、肩部と、前記小穴フレーム及び前記肩部の間の狭窄部とを備え、前記プッシャ遠位端は、前記プッシャ要素が前記第1の長手方向に移動されるとき、前記肩部と接触するように構成される請求項34に記載の装置。
- 前記位置特定要素は、音波発生表面処理を備える請求項21〜36のいずれかに記載の装置。
- 前記音波発生表面処理は、表面粗さと前記位置特定要素の表面に切り込んだパターンとのうちの少なくとも1つを備える請求項37に記載の装置。
- 前記輸送ニードルは、ニードル背面側と、前記ニードル背面側の反対のニードル前面側とを備え、前記丸められた縁部の少なくとも一部は、前記ニードル背面側に沿う請求項21〜38のいずれかに記載の装置。
- 前記輸送ニードルは、前記ニードル背面側に沿った前記丸められた縁部の近位にあるニードルディンプルを備える請求項39に記載の装置。
- 前記位置特定要素は、前記ニードル管腔内にあるとき、第1の構成を有し、前記輸送ニードルから展開されるとき、第2の構成を有する請求項21〜40のいずれかに記載の装置。
- 前記位置特定要素の前記第2の構成は、円形形状である請求項41に記載の装置。
- 前記位置特定要素は、ロケータ遠位端を備え、前記ロケータ遠位端は、少なくとも2つの要素先端を備える請求項21〜42のいずれかに記載の装置。
- 前記位置特定要素は、湾曲面を有し、前記位置特定要素の少なくとも一部は、前記湾曲面と並んで湾曲し、前記位置特定要素の他の一部は、前記湾曲面から湾曲する請求項21〜43のいずれかに記載の装置。
- 前記ハンドルは、ハンドル管腔を備え、前記プッシャ要素の少なくとも一部は、前記ハンドル管腔内でスライド可能に移動するように構成される請求項21〜44のいずれかに記載の装置。
- 組織位置特定装置であって、
スライド可能な輸送制御を備えたハンドルと、
前記ハンドルから伸び、ニードル管腔を備えた輸送ニードルと、
部分的に前記ニードル管腔内に設けられるプッシャ要素と、
前記ニードル管腔内にあるとき、前記プッシャ要素によって取外し可能に保持され、少なくともその一部分が、前記スライド可能な輸送制御の第1の長手方向への移動に応じて輸送ニードルを出るように構成された位置特定要素と、
前記位置特定要素に連結され、ポリマ外被が被覆され、その少なくともセグメントがループ状に巻きつけられるか、又は結び付けられるように構成される可撓性トラッキングワイヤとを備える装置。 - 前記プッシャ要素の一部と前記ニードル管腔との間に位置決めされたライナをさらに備える請求項46に記載の装置。
- 前記ライナは、金属材料を備える請求項47に記載の装置。
- 前記ライナの近位端に連結されたばねをさらに備え、
前記ばねは、前記プッシャ要素が前記スライド可能な輸送制御の前記第1の長手方向への移動に応じて前記ライナに対して前記輸送ニードの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成される請求項47又は48のいずれかに記載の装置。 - 前記トラッキングワイヤの少なくとも一部は、前記位置特定要素と前記トラッキングワイヤの少なくとも一部が展開されたとき、前記位置特定要素によって形成される曲線に対して割線を配列するように構成される請求項46〜49のいずれかに記載の装置。
- 前記トラッキングワイヤは、前記位置特定要素の中間点と終点との間の点において前記位置特定要素に連結される請求項46〜50のいずれかに記載の装置。
- 前記スライド可能な輸送制御は、第1の界面及び第2の界面を備え、前記ハンドルは、近位端及び遠位端を備え、前記第1の界面は、前記近位端から前記遠位端まで見たとき、上方に凹んでおり、前記第2の界面は、前記遠位端から前記近位端まで見たとき、上方に凹んでいる請求項46〜51のいずれかに記載の装置。
- 前記ハンドルは、ハハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項46〜52のいずれかに記載の装置。
- 前記ハンドルは、前記ハンドル背面側に沿った長尺スロットを有し、前記スライド可能な輸送制御は、前記長尺スロットを通じて伸びるファスナを介して前記プッシャ要素に連結される請求項53に記載の装置。
- 前記プッシャ要素は、輸送ポートを備え、前記位置特定要素の少なくとも一部は、前記輸送ポート内に取外し可能に保持され、前記位置特定要素は、前記輸送ポートの少なくとも一部が前記輸送ニードルから移動するとき、前記プッシャ要素から自動的に取り外されるように構成される請求項46〜54のいずれかに記載の装置。
- 前記輸送ポートは、遠位ポート側、近位ポート側、及びポート基部を有し、前記遠位ポート側は、前記組織位置特定装置の横側から見たとき、前記ポート基部と鋭角を形成する請求項55に記載の装置。
- 前記プッシャ要素は、プッシャ背面側、プッシャ前面側、及びプッシャ遠位端を有し、前記プッシャ遠位端は、傾斜しており、前記プッシャ前面側と鈍角を形成する請求項46〜56のいずれかに記載の装置。
- 前記プッシャ遠位端は、前記組織位置特定装置の横側から見たとき、前記プッシャ背面側と鋭角を形成する請求項57に記載の装置。
- 前記位置特定要素は、小穴フレームと、肩部と、前記小穴フレーム及び前記肩部の間の狭窄部とを備え、前記プッシャ遠位端は、前記プッシャ要素が前記第1の長手方向に移動されるとき、前記肩部と接触するように構成される請求項57に記載の装置。
- 前記位置特定要素は、音波発生表面処理を備える請求項46〜59のいずれかに記載の装置。
- 前記音波発生表面処理は、表面粗さと前記位置特定要素の表面に切り込んだパターンとのうちの少なくとも1つを備える請求項60に記載の装置。
- 前記輸送ニードルは、面取り遠位端と、ニードル背面側と、前記ニードル背面側の反対のニードル前面側とを備え、前記面取り遠位端の少なくとも一部は、前記ニードル背面側に沿った丸められた縁部によって規定される請求項46〜61のいずれかに記載の装置。
- 前記輸送ニードルは、前記ニードル背面側に沿った前記丸められた縁部の近位にあるニードルディンプルを備える請求項62に記載の装置。
- 前記位置特定要素は、前記ニードル管腔内にあるとき、第1の構成を有し、前記輸送ニードルから展開されるとき、第2の構成を有する請求項46〜63のいずれかに記載の装置。
- 前記位置特定要素の前記第2の構成は、円形形状である請求項64に記載の装置。
- 前記位置特定要素は、ロケータ遠位端を備え、前記ロケータ遠位端は、少なくとも2つの要素先端を備える請求項46〜65のいずれかに記載の装置。
- 前記位置特定要素は、湾曲面を有し、前記位置特定要素の少なくとも一部は、前記湾曲面と並んで湾曲し、前記位置特定要素の他の一部は、前記湾曲面から湾曲する請求項46〜66のいずれかに記載の装置。
- 前記ハンドルは、ハンドル管腔を備え、前記プッシャ要素の少なくとも一部は、前記ハンドル管腔内でスライド可能に移動するように構成される請求項46〜67のいずれかに記載の装置。
- 組織位置特定装置であって、
ニードル管腔を備えた輸送ニードルと、
前記輸送ニードル管腔内でスライド可能に移動するように構成されたプッシャ要素と、
前記プッシャ要素によって取外し可能に保持され、前記プッシャ要素の移動に応じて前記ニードル管腔内でスライド可能に移動するように構成された位置特定要素とを備え、
前記位置特定要素の少なくとも一部は、ブルーオキサイド仕上げで被覆される装置。 - 前記プッシャ要素の一部と前記ニードル管腔との間に位置決めされたライナをさらに備える請求項69に記載の装置。
- 前記ライナは、金属材料を備える請求項70に記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項69〜71のいずれかに記載の装置。 - 前記トラッキングワイヤの少なくとも一部は、ポリマ外被で被覆される請求項72に記載の装置。
- 前記トラッキングワイヤの少なくとも一部は、前記位置特定要素と前記トラッキングワイヤの少なくとも一部が展開されたとき、前記位置特定要素によって形成される曲線に対して割線を配列するように構成される請求項72に記載の装置。
- 前記トラッキングワイヤは、前記位置特定要素の中間点と終点との間の点において前記位置特定要素に連結される請求項72に記載の装置。
- 前記ライナの近位端に連結されたばねをさらに備え、
前記ばねは、前記プッシャ要素が前記スライド可能な輸送制御の前記第1の長手方向への移動に応じて前記ライナに対して前記輸送ニードルの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成される請求項69〜75のいずれかに記載の装置。 - 前記輸送ニードルに連結されたハンドルをさらに備え、前記ハンドルは、ハンドル管腔を有し、前記プッシャ要素の少なくとも一部は、前記ハンドル管腔内に位置決めされるように構成される請求項69〜76のいずれかに記載の装置。
- 前記プッシャ要素に連結された、スライド可能な輸送制御をさらに備え、前記スライド可能な輸送制御は、第1の界面及び第2の界面を備え、前記ハンドルは、近位端及び遠位端を備え、前記第1の界面は、前記近位端から前記遠位端まで見たとき、上方に凹んでおり、前記第2の界面は、前記遠位端から前記近位端まで見たとき、上方に凹んでいる請求項77に記載の装置。
- 前記ハンドルは、ハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項77に記載の装置。
- 前記ハンドルは、前記ハンドル背面側に沿った長尺スロットを有し、前記スライド可能な輸送制御は、前記長尺スロットを通じて伸びるファスナを介して前記プッシャ要素に連結される請求項79に記載の装置。
- 前記プッシャ要素は、輸送ポートを備え、前記位置特定要素の少なくとも一部は、前記輸送ポート内に取外し可能に保持され、前記位置特定要素は、前記輸送ポートの少なくとも一部が前記輸送ニードルから移動するとき、前記プッシャ要素から自動的に取り外されるように構成される請求項69〜80のいずれかに記載の装置。
- 前記輸送ポートは、遠位ポート側、近位ポート側、及びポート基部を有し、前記遠位ポート側は、前記組織位置特定装置の横側から見たとき、前記ポート基部と鋭角を形成する請求項81に記載の装置。
- 前記プッシャ要素は、プッシャ背面側、プッシャ前面側、及びプッシャ遠位端を有し、前記プッシャ遠位端は、傾斜しており、前記プッシャ前面側と鈍角を形成する請求項69〜82のいずれかに記載の装置。
- 前記プッシャ遠位端は、前記組織位置特定装置の横側から見たとき、前記プッシャ背面側と鋭角を形成する請求項83に記載の装置。
- 前記位置特定要素は、小穴フレームと、肩部と、前記小穴フレーム及び前記肩部の間の狭窄部とを備え、前記プッシャ遠位端は、前記プッシャ要素が前記第1の長手方向に移動されるとき、前記肩部と接触するように構成される請求項84に記載の装置。
- 前記位置特定要素は、音波発生表面処理を備える請求項69〜85のいずれかに記載の装置。
- 前記音波発生表面処理は、表面粗さと前記位置特定要素の表面に切り込んだパターンとのうちの少なくとも1つを備える請求項86に記載の装置。
- 前記輸送ニードルは、面取り遠位端によって規定される請求項69〜87のいずれかに記載の装置。
- 前記輸送ニードルは、前記面取り遠位端の近位にニードルディンプルを備える請求項88に記載の装置。
- 前記位置特定要素は、前記ニードル管腔内にあるとき、第1の構成を有し、前記輸送ニードルから展開されるとき、第2の構成を有する請求項69〜89のいずれかに記載の装置。
- 前記位置特定要素の前記第2の構成は、円形形状である請求項90に記載の装置。
- 前記位置特定要素は、ロケータ遠位端を備え、前記ロケータ遠位端は、少なくとも2つの要素先端を備える請求項69〜91のいずれかに記載の装置。
- 前記位置特定要素は、湾曲面を有し、前記位置特定要素の少なくとも一部は、前記湾曲面と並んで湾曲し、前記位置特定要素の他の一部は、前記湾曲面から湾曲する請求項69〜92のいずれかに記載の装置。
- 組織位置特定システムは、
ユーザの片手のみで支持されるように構成される組織位置特定装置を備え、 スライド可能な輸送制御を備えたハンドルと、
前記ハンドルから伸び、前記スライド可能な輸送制御に連結されたプッシャ要素を含む輸送ニードルと、
前記スライド可能な輸送制御の移動に応じて前記位置特定要素の少なくとも一部を前記輸送ニードルから組織内へ展開するように構成された前記プッシャ要素により、取外し可能に指示された位置特定要素とを備えた
前記組織位置特定装置と、
ユーザの片手のみで支持されるように構成され、前記位置特定要素が組織内に展開される際、前記組織の表面上を動かされる超音波トランスデューサとを備えるシステム。 - 前記プッシャ要素の一部と前記ニードル管腔との間に位置決めされたライナをさらに備える請求項94に記載の装置。
- 前記ライナは、金属材料を備える請求項95に記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項94〜96のいずれかに記載の装置。 - 前記トラッキングワイヤの少なくとも一部は、ポリマ外被で被覆される請求項97に記載の装置。
- 前記ハンドルは、ハンドル管腔を有し、前記プッシャ要素の少なくとも一部は、前記ハンドル管腔内に位置決めされるように構成される請求項94〜98のいずれかに記載の装置。
- 組織位置特定装置を使用した組織の位置特定方法であって、
前記組織位置特定装置のハンドルから伸びる前記組織位置特定装置の輸送ニードルのニードル先端を、目標組織部位に隣接して位置決めすることと、
前記組織位置特定装置のスライド可能な輸送制御を第1の長手方向に移動させることと、
前記スライド可能な輸送制御の前記移動に応じ、前記輸送ニードルのニードル管腔を通じて、前記第1の長手方向に、前記組織位置特定装置の位置特定要素を移動させることと、
前記位置特定要素を前記輸送ニードルから展開することとを備え、前記位置特定要素の少なくとも一部は、展開時、湾曲する方法。 - 前記ニードル先端は、目標組織部位に隣接したオフセット位置に位置決めされる請求項100に記載の方法。
- 前記オフセット位置は、前記位置特定要素の直径と前記目標組織部位の直径との間の差異未満、前記目標部位から離間している請求項101に記載の方法。
- 前記スライド可能な輸送制御を移動させることは、ユーザの片手を使用して前記ハンドルを保持することと、前記スライド可能な輸送制御を前記第1の長手方向に押圧することとを備える請求項100〜102のいずれかに記載の方法。
- 前記位置特定要素の少なくとも一部が前記輸送ニードルから展開された後、前記位置特定要素を前記輸送ニードル内に撤退させることをさらに備える請求項100〜103のいずれかに記載の方法。
- 前記位置特定要素を撤退させることは、スライド可能な輸送制御を前記第1の長手方向の反対の第2の長手方向に移動させることを備える請求項104に記載の方法。
- 超音波トランスデューサを使用して、組織内の前記位置特定要素の位置を視認することをさらに備える請求項100〜105のいずれかに記載の方法。
- 前記位置特定要素を展開しつつ、前記目標組織部位の近位の組織表面上で前記超音波トランスデューサを動かすことをさらに備える請求項106に記載の方法。
- 前記目標組織部位から離間して前記輸送ニードルのニードル先端を撤退させることと、
前記輸送ニードルの前記ニードル先端を撤退させるとき、前記位置特定要素に連結された、その少なくともセグメントが患者の前記組織から伸びるトラッキングワイヤを露出させることとと、
前記患者の前記組織から伸びる前記トラッキングワイヤの前記セグメントをループ状に巻き付けることとをさらに備える請求項100〜107のいずれかに記載の方法。 - 前記ループ状に巻きつけられた前記トラッキングワイヤを前記患者の真皮に接着することをさらに備える請求項108に記載の方法。
- 前記輸送ニードルから、前記スライド可能な輸送制御に連結されたプッシャ要素を介して、前記位置特定要素を移動させることをさらに備える請求項100〜109のいずれかに記載の方法。
- 前記位置特定要素を前記輸送ニードルから展開することは、前記プッシャ要素の輸送ポートを前記ニードル管腔から移動させることを備え、前記輸送ポートは、前記位置特定要素の少なくとも一部を取り外し可能に保持する請求項110に記載の方法。
- 前記位置特定要素を前記輸送ニードルから展開するのに先立って、前記プッシャ要素を部分的に収容したライナの近位端に連結されたばねを、少なくとも部分的に加圧することをさらに備える請求項110に記載の方法。
- 組織位置特定装置を使用した組織の位置特定方法であって、
前記組織位置特定装置のハンドルから伸びる、前記組織位置特定装置の輸送ニードルのニードル先端を目標組織部位に隣接して位置決めすることと、
前記輸送ニードルのニードル管腔を通じて、第1の長手方向に、前記組織位置特定装置の位置特定要素を移動させることと、
前記位置特定要素を、前記輸送ニードルから、患者の組織内の湾曲面を有する湾曲構造内に展開することとを備え、前記湾曲面は、前記患者の前記組織内の疑わしい組織塊のいずれの部分にも交差しない方法。 - 前記位置特定要素を移動させることは、前記組織位置特定装置のスライド可能な輸送制御を第1の長手方向に移動させることを備え、前記スライド可能な輸送制御は、前記位置特定要素を取り外し可能に保持するプッシャ要素に連結される請求項113に記載の方法。
- 前記スライド可能な輸送制御を移動させることは、ユーザの片手を使用して前記ハンドルを保持することと、前記スライド可能な輸送制御を前記第1の長手方向に押圧することとを備える請求項114に記載の方法。
- 前記位置特定要素を前記輸送ニードルから展開することは、前記プッシャ要素の輸送ポートを前記ニードル管腔から移動させることを備え、前記輸送ポートは、前記位置特定要素の少なくとも一部を取り外し可能に保持する請求項114に記載の方法。
- 前記位置特定要素を前記輸送ニードルから展開するのに先立って、前記プッシャ要素を部分的に収容したライナの近位端に連結されたばねを、少なくとも部分的に加圧することをさらに備える請求項114に記載の方法。
- 前記ニードル先端は、目標組織部位に隣接したオフセット位置に位置決めされる請求項113〜117のいずれかに記載の方法。
- 前記オフセット位置は、前記位置特定要素の直径と前記目標組織部位の直径との間の差異未満、前記目標部位から離間している請求項118に記載の方法。
- 前記位置特定要素の少なくとも一部が前記輸送ニードルから展開された後、前記位置特定要素を前記輸送ニードル内に撤退させることをさらに備える請求項113〜119のいずれかに記載の方法。
- 前記位置特定要素を撤退させることは、スライド可能な輸送制御を前記第1の長手方向の反対の第2の長手方向に移動させることを備える請求項120に記載の方法。
- 超音波トランスデューサを使用して、組織内の前記位置特定要素の位置を視認することをさらに備える請求項113〜121のいずれかに記載の方法。
- 前記位置特定要素を展開しつつ、前記目標組織部位の近位の組織表面上で前記超音波トランスデューサを動かすことをさらに備える請求項122に記載の方法。
- 前記目標組織部位から離間して前記輸送ニードルのニードル先端を撤退させることと、
前記輸送ニードルの前記ニードル先端を撤退させるとき、前記位置特定要素に連結された、その少なくともセグメントが患者の前記組織から伸びるトラッキングワイヤを露出させることとと、
前記患者の前記組織から伸びる前記トラッキングワイヤの前記セグメントをループ状に巻き付けることとをさらに備える請求項113〜123のいずれかに記載の方法。 - 前記ループ状に巻きつけられた前記トラッキングワイヤを前記患者の真皮に接着することをさらに備える請求項124に記載の方法。
- 患者の組織内の疑わしい組織塊の位置を見つける方法であって、
前記患者の体外に伸びる、その遠位端が前記患者の前記組織内に展開された位置特定要素に連結されたトラッキングワイヤのセグメントを周期的に引き寄せることと、
前記トラッキングワイヤの前記セグメントを引き寄せつつ、前記患者の前記組織を被覆する真皮を触診することと、
引っ張られている前記トラッキングワイヤが示す張力と前記触診によって感じられる動きとに基づき、前記疑わしい組織塊の位置を見つけることとを備える方法。 - 超音波トランスデューサを使用して、前記組織内の前記位置特定要素の位置を視認することをさらに備える請求項126に記載の方法。
- 前記位置特定要素は、音波発生表面処理を備える請求項126又は127のいずれかに記載の装置。
- 前記音波発生表面処理は、表面粗さと前記位置特定要素の表面に切り込んだパターンとのうちの少なくとも1つを備える請求項128に記載の装置。
- 目標組織部位の位置を見つけるためのトラッキングワイヤであって、
ワイヤ遠位セグメント、及び前記ワイヤ遠位セグメントの反対のワイヤ近位セグメントを有するワイヤを備え、前記ワイヤ遠位セグメントの少なくとも一部は、前記ワイヤに沿った取付部位において、前記ワイヤ遠位セグメントと前記ワイヤ近位セグメントとの間で前記ワイヤの他のセグメントの一部に固定され、
前記ワイヤ遠位セグメントと前記取付部位との間の前記ワイヤの前記セグメントは、ループとして形成され、
前記ワイヤの少なくとも一部を被覆するポリマ外被を備えるトラッキングワイヤ。 - 前記取付部位は、前記ポリマ外被に被覆される請求項130に記載のトラッキングワイヤ。
- 前記ワイヤは、ステンレススチールを備える請求項130又は131のいずれかに記載のトラッキングワイヤ。
- 前記ワイヤの少なくとも一部は、患者の前記組織内に展開されるように構成される請求項130〜132のいずれかに記載のトラッキングワイヤ。
- 前記ワイヤ遠位セグメントと前記ワイヤ近位セグメントとの間の前記ワイヤのセグメントは、位置特定要素の一部の周囲において結び目状に結び付けられるように構成される請求項130〜133のいずれかに記載のトラッキングワイヤ。
- 組織位置特定アセンブリの準備方法であって、
位置特定要素の開口を通じてワイヤのワイヤ遠位セグメントをねじ込むことと、
前記ワイヤに沿った取付部位において、前記ワイヤ遠位セグメントの少なくとも一部を、ループを形成する前記ワイヤ遠位セグメントと前記ワイヤ近位セグメントとの間の前記ワイヤの他のセグメントの一部に固定することと、
前記ワイヤの少なくとも一部をポリマ外被で被覆することとを備える方法。 - 前記取付部位を前記ポリマ外被で被覆することをさらに備える請求項135に記載の方法。
- 前記ワイヤのセグメントを組織位置特定装置のプッシャ要素の管腔内に挿入することをさらに備える請求項135又は136のいずれかに記載の方法。
- 前記ワイヤに連結された前記位置特定要素の少なくとも一部を前記プッシャ要素の輸送ポート内に位置決めすることをさらに備える請求項137に記載の方法。
- 前記プッシャ要素を前記組織位置特定装置の輸送ニードルの管腔内にスライド可能に移動させることをさらに備える請求項138に記載の方法。
- 組織位置特定装置であって、
回転可能な輸送制御を備えるハンドルと、
前記ハンドルから伸びる輸送ニードルと、
輸送ニードル内にあるとき、第1の構成にある位置特定要素とを備え、前記位置特定要素は、前記輸送制御が第1の回転方向に回転されるとき、前記輸送ニードルから第2の構成に展開されるように構成され、前記位置特定要素の一部は、前記輸送ニードル内で長手方向に移動するように構成されたプッシャ要素の遠位端によって取外し可能に保持される装置。 - 前記位置特定要素は、前記回転可能な輸送制御が第2の回転方向に回転されるとき、前記輸送ニードル内に撤退されるように構成される請求項140に記載の装置。
- 前記位置特定要素の少なくとも一部が前記輸送ニードルを出るとき、音を生じるように構成された音生成要素をさらに備える請求項140又は141のいずれかに記載の装置。
- 前記音生成要素は、ばねを備える請求項142に記載の装置。
- 触覚フィードバック生成要素をさらに備え、前記触覚フィードバック生成要素は、前記位置特定要素が前記輸送ニードルを出る時間の少なくとも一部において、触覚フィードバックを生じるように構成された請求項140〜143のいずれかに記載の装置。
- 前記回転可能な輸送制御は、ノブを備える請求項140〜144に記載の装置。
- 前記ハンドルは、曲率を備えた配向アーチを備え、前記位置特定要素は、展開時、前記配向アーチの前記曲率に合致する方向において、湾曲するように構成された請求項140〜145のいずれかに記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備える請求項140〜146のいずれかに記載の装置。
- 前記ハンドルのハンドル管腔内に駆動パイプをさらに備え、前記駆動パイプは、前記回転可能な輸送制御の回転に応じて、前記ハンドル管腔内で回転するように構成される請求項140〜147に記載の装置。
- 前記プッシャ要素に連結されたカー要素をさらに備え、前記カー要素は、前記駆動パイプの前記回転に応じて、前記駆動パイプのパイプ管腔内で長手方向に移動するように構成される請求項140〜148に記載の装置。
- 組織位置特定装置を使用した組織位置特定方法であって、
前記組織位置特定装置の輸送ニードルを目標組織部位に隣接して位置決めすることと、
前記組織位置特定装置の回転可能な輸送制御を第1の回転方向に回転させることと、
前記回転可能な輸送制御の前記回転に応じて、前記輸送ニードルのニードル管腔を通じて、第1の長手方向に、前記組織位置特定装置の位置特定要素を移動させることと、
前記位置特定要素を前記輸送ニードルから前記目標位置に隣接して、又は前記目標位置に展開することとを備え、前記位置特定要素の少なくとも一部は、展開時、湾曲する方法。 - ユーザの片手を使用して、前記組織位置特定装置のハンドルを保持することと、前記ユーザの同一の片手の少なくとも1本の手指を使用して、前記回転可能な輸送制御を前記第1の回転方向に回転させることとを備える請求項150に記載の方法。
- 前記位置特定要素の少なくとも一部が前記輸送ニードルから展開された後、前記位置特定要素を前記輸送ニードル内に撤退させることをさらに備える請求項150又は151のいずれかに記載の方法。
- ユーザの片手を使用して、前記組織位置特定装置のハンドルを保持することと、前記ユーザの同一の手の少なくとも1つの手指を使用して、前記回転可能な輸送制御を第2の回転方向に回転させることにより、前記位置特定要素を前記輸送ニードル内に撤退させることとをさらに備える請求項152に記載の方法。
- 前記位置特定要素を前記第1の長手方向に移動させることは、前記回転可能な輸送制御の前記回転に応じて、プッシャ要素を前記組織位置特定装置の駆動パイプ内で移動させることをさらに備える請求項150〜153のいずれかに記載の方法。
- 前記プッシャ要素は、触覚フィードバック生成要素を備え、前記方法は、前記位置特定要素が前記輸送ニードルの遠位先端から部分的に展開されたとき、前記触覚フィードバック生成要素によって触覚フィードバックを生成することをさらに備える請求項154に記載の方法。
- 前記プッシャ要素は、音生成要素を備え、前記方法は、前記位置特定要素が前記輸送ニードルの遠位先端から部分的に展開されたとき、前記音生成要素を使用して音を生成することをさらに備える請求項154に記載の方法。
- 前記プッシャ要素を前記駆動パイプ内で移動させることは、前記プッシャ要素に連結されたカー要素を移動させることをさらに備え、前記カー要素は、前記駆動パイプの回転に応じて、前記駆動パイプ内で長手方向に移動される請求項154に記載の方法。
- 前記駆動パイプは、前記回転可能な輸送制御の回転に応じて回転される請求項154に記載の方法。
- 前記輸送ニードルの遠位先端を前記目標組織部位から離間して撤退させることをさらに備える請求項150〜158のいずれかに記載の方法。
- 前記輸送ニードルの前記遠位先端を撤退させるとき、前記位置特定要素に連結されたトラッキングワイヤを露出することをさらに備える請求項159に記載の方法。
- 組織位置特定装置であって、
ニードル管腔を備えた輸送ニードルと、
前記ニードル管腔内でスライド可能に移動可能であり、前記輸送ニードルから取外し可能である位置特定要素と、
前記ニードル管腔内のライナとを備え、前記ライナは、前記ニードル管腔に対してスライド可能に移動可能であり、径方向において前記ニードル管腔と前記位置特定要素の少なくとも一部との間にある装置。 - スライド可能な輸送制御を備え、そこから前記輸送ニードルの伸びるハンドルと、
部分的に前記ニードル管腔内に設けられるプッシャ要素とをさらに備え、前記位置特定要素は、前記プッシャ要素によって取外し可能に保持され、前記位置特定要素は、前記スライド可能な輸送制御の第1の長手方向への移動に応じて、前記プッシャ要素から取外し可能である請求項161に記載の装置。 - 前記位置特定要素は、前記プッシャ要素の遠位端が前記ライナを長手方向に超えて移動されるとき、前記ライナから解放可能である請求項162に記載の装置。
- 前記スライド可能な輸送制御は、第1の界面及び第2の界面を備え、前記ハンドルは、近位端及び遠位端を備え、前記第1の界面は、前記近位端から前記遠位端まで見たとき、上方に凹んでおり、前記第2の界面は、前記遠位端から前記近位端まで見たとき、上方に凹んでいる請求項162又は163のいずれかに記載の装置。
- 前記ハンドルは、ハンドル背面側と前記ハンドル背面側の反対のハンドル前面側とを備え、前記位置特定要素は、展開時、前記ハンドル背面側の方向に湾曲するように構成される請求項162〜164のいずれかに記載の装置。
- 前記ハンドルは、前記ハンドル背面側に沿った長尺スロットを有し、前記スライド可能な輸送制御は、前記長尺スロットを通じて伸びるファスナを介して前記プッシャ要素に連結される請求項165に記載の装置。
- 前記プッシャ要素は、前記プッシャ要素の遠位端に輸送ポートを備え、前記位置特定要素の少なくとも一部は、前記位置特定要素が前記ニードル管腔内にあるとき、前記輸送ポート内に取外し可能に保持される請求項162〜166のいずれかに記載の装置。
- 前記プッシャ要素は、プッシャ背面側、プッシャ前面側、及びプッシャ遠位端を有し、前記プッシャ遠位端は、傾斜しており、前記プッシャ前面側と鈍角を形成する請求項162〜167のいずれかに記載の装置。
- 前記ライナの近位端に連結されたばねをさらに備え、
前記ばねは、前記プッシャ要素が前記スライド可能な輸送制御の前記第1の長手方向への移動に応じて前記ライナに対して前記輸送ニードの遠位端に向かって移動されるとき、少なくとも部分的に加圧されるように構成される請求項162〜168のいずれかに記載の装置。 - 前記位置特定要素は、音波発生表面処理を備える請求項161〜169のいずれかに記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項161〜170のいずれかに記載の装置。 - 組織位置特定装置であって、
ニードル管腔を備える輸送ニードルと、
前記ニードル管腔内でスライド可能に移動可能であり、輸送ポートを備えるプッシャ要素と、
連動フレームワークを備える位置特定要素とを備え、前記連動フレームワークは、前記プッシャ要素の少なくとも一部が前記ニードル管腔内にあるとき、前記輸送ポートと相互係止可能であり、前記連動フレームワークは、前記輸送ポートが前記ニードル管腔を出たとき、前記輸送ポートから解放可能である装置。 - 輸送制御を備えたハンドルをさらに備え、前記輸送ニードルは、前記ハンドルから伸び、前記輸送制御は、前記プッシャ要素に連結される請求項172に記載の装置。
- 前記位置特定要素の前記連動フレームワークは、小穴フレームと肩部とを備え、前記小穴フレームは、前記位置特定要素が前記ニードル管腔内にあるとき、前記輸送ポート内で取外し可能に位置決めされる請求項172又は173のいずれかに記載の装置。
- 前記位置特定要素に連結されたトラッキングワイヤをさらに備え、
前記トラッキングワイヤの少なくともセグメントは、ループ状に巻きつけられるか、又は結び付けられるように構成される請求項172〜174のいずれかに記載の装置。 - 組織位置特定装置の使用方法であって、
前記位置特定装置の輸送ニードルのニードル管腔を通じて、第1の長手方向に、前記組織位置特定装置の位置特定要素を移動させることと、
前記組織位置特定装置の位置特定要素を前記輸送ニードルから前記組織内に展開させることと、
前記位置特定要素の少なくとも一部が前記輸送ニードルから展開された後、前記位置特定要素を前記ニードル管腔内に撤退させることと、
前記輸送ニードルの先端を再度位置決めすることと、
前記位置特定要素を前記輸送ニードルから前記組織内に再度展開させることとを備える方法。 - 前記位置特定要素を前記輸送ニードルから第1の湾曲面を有する湾曲構成に展開することと、前記位置特定要素を前記輸送ニードルから第2の湾曲面を有する湾曲構成に再度展開することとをさらに備える請求項176に記載の方法。
- 前記組織上に超音波トランスデューサを位置決めすることと、
前記位置特定要素を移動させつつ、前記組織上で前記超音波トランスデューサを動かすこととをさらに備える請求項176又は177のいずれかに記載の方法。 - 前記輸送ニードルのニードル先端を、前記組織内の、前記組織の目標組織部位からのオフセットに進行させることと、
前記組織位置特定装置のスライド可能な輸送制御を前記組織位置特定装置のハンドルに沿った前記第1の長手方向に押圧することにより、前記位置特定要素を前記輸送ニードルから展開させることとをさらに備える請求項176〜178のいずれかに記載の方法。 - 前記位置特定要素を前記輸送ニードルから展開することに先立ち、前記スライド可能な輸送制御に連結されたプッシャ要素を部分的に収容したライナの近位端に連結されたばねを加圧することをさらに備える請求項179に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662322729P | 2016-04-14 | 2016-04-14 | |
| US62/322,729 | 2016-04-14 | ||
| US201762448307P | 2017-01-19 | 2017-01-19 | |
| US62/448,307 | 2017-01-19 | ||
| PCT/US2017/027796 WO2017181136A1 (en) | 2016-04-14 | 2017-04-14 | Tissue localization device and method of use thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019523656A true JP2019523656A (ja) | 2019-08-29 |
Family
ID=60039769
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018545596A Pending JP2019523656A (ja) | 2016-04-14 | 2017-04-14 | 組織位置特定装置及びその使用方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (5) | US10524875B2 (ja) |
| EP (1) | EP3407794A4 (ja) |
| JP (1) | JP2019523656A (ja) |
| AU (1) | AU2017248823B2 (ja) |
| CA (1) | CA3018761A1 (ja) |
| WO (1) | WO2017181136A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2017248823B2 (en) | 2016-04-14 | 2022-05-12 | Hologic, Inc. | Tissue localization device and method of use thereof |
| US10959802B1 (en) | 2017-04-17 | 2021-03-30 | Linda Henderson | Tissue marking device and method of use |
| US11331161B2 (en) * | 2018-03-23 | 2022-05-17 | Covidien Lp | Surgical assemblies facilitating tissue marking and methods of use thereof |
| US11266481B2 (en) | 2018-10-12 | 2022-03-08 | Hologic, Inc. | Tissue localization marker with D-shaped cross-section |
| EP3864507A4 (en) * | 2018-10-12 | 2022-07-20 | Hologic, Inc. | TISSUE LOCATING DEVICE AND METHOD OF USE |
| EP3866693A4 (en) * | 2018-10-17 | 2022-08-24 | DFC Medical LLC | FABRIC MARKING DEVICE AND METHODS OF USE |
| DE102019210963A1 (de) * | 2019-07-24 | 2021-01-28 | Bip Biomed.-Instrumente & Produkte Gmbh | Implantierbarer Marker |
| KR102678775B1 (ko) | 2020-03-11 | 2024-06-27 | 한국전자통신연구원 | 가상 현실 콘텐츠의 경험 품질 평가 장치 및 방법 |
| EP4138716A1 (en) * | 2020-04-23 | 2023-03-01 | DFC Medical LLC | Tissue marking device and methods of use thereof |
| KR102593727B1 (ko) | 2020-06-01 | 2023-10-26 | 한국전자통신연구원 | 5g와 atsc 3.0의 통합 코어 네트워크, 제어 평면 엔티티 및 제어 평면 엔티티에서의 멀티미디어 콘텐츠 전송 제어 방법 |
Family Cites Families (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3175554A (en) * | 1963-03-26 | 1965-03-30 | Becton Dickinson Co | Split biopsy needle |
| DE3750480T2 (de) | 1986-11-29 | 1995-03-02 | Terumo Corp | Mit ballon versehener katheter. |
| US4869259A (en) | 1988-05-17 | 1989-09-26 | Vance Products Incorporated | Echogenically enhanced surgical instrument and method for production thereof |
| US5109867A (en) | 1991-04-19 | 1992-05-05 | Target Therapeutics | Extendable guidewire assembly |
| EP1011889B1 (en) | 1996-01-30 | 2002-10-30 | Medtronic, Inc. | Articles for and methods of making stents |
| US6007557A (en) | 1998-04-29 | 1999-12-28 | Embol-X, Inc. | Adjustable blood filtration system |
| US6706033B1 (en) | 1999-08-02 | 2004-03-16 | Edwards Lifesciences Corporation | Modular access port for device delivery |
| US6280432B1 (en) | 1999-08-04 | 2001-08-28 | Embol-X, Inc. | Clip-on access port and methods of use |
| US6666846B1 (en) | 1999-11-12 | 2003-12-23 | Edwards Lifesciences Corporation | Medical device introducer and obturator and methods of use |
| US6406471B1 (en) | 1999-12-28 | 2002-06-18 | Embol-X, Inc. | Arterial filter with aspiration and methods of use |
| AU2001238382A1 (en) * | 2000-02-18 | 2001-08-27 | Thomas J. M. D. Fogarty | Improved device for accurately marking tissue |
| US7220266B2 (en) | 2000-05-19 | 2007-05-22 | C. R. Bard, Inc. | Tissue capturing and suturing device and method |
| US6902564B2 (en) | 2001-08-15 | 2005-06-07 | Roy E. Morgan | Methods and devices for electrosurgery |
| JP4180382B2 (ja) * | 2000-11-07 | 2008-11-12 | アーテミス・メディカル・インコーポレイテッド | 組織分離アセンブリー及び組織分離方法 |
| US6605047B2 (en) | 2001-09-10 | 2003-08-12 | Vivant Medical, Inc. | Biopsy marker delivery system |
| US6878147B2 (en) | 2001-11-02 | 2005-04-12 | Vivant Medical, Inc. | High-strength microwave antenna assemblies |
| US7128739B2 (en) | 2001-11-02 | 2006-10-31 | Vivant Medical, Inc. | High-strength microwave antenna assemblies and methods of use |
| US20060292206A1 (en) | 2001-11-26 | 2006-12-28 | Kim Steven W | Devices and methods for treatment of vascular aneurysms |
| US7197363B2 (en) | 2002-04-16 | 2007-03-27 | Vivant Medical, Inc. | Microwave antenna having a curved configuration |
| US6752767B2 (en) | 2002-04-16 | 2004-06-22 | Vivant Medical, Inc. | Localization element with energized tip |
| US20050119562A1 (en) * | 2003-05-23 | 2005-06-02 | Senorx, Inc. | Fibrous marker formed of synthetic polymer strands |
| US7311703B2 (en) | 2003-07-18 | 2007-12-25 | Vivant Medical, Inc. | Devices and methods for cooling microwave antennas |
| EP1559379A1 (de) | 2004-01-31 | 2005-08-03 | Labotect Verwaltungs GmbH | Vorrichtung zum Setzen von Markern in ein Gewebe |
| US7833281B2 (en) * | 2004-12-15 | 2010-11-16 | Lehman Glen A | Method and apparatus for augmentation of a sphincter |
| US7799019B2 (en) | 2005-05-10 | 2010-09-21 | Vivant Medical, Inc. | Reinforced high strength microwave antenna |
| US9511210B2 (en) | 2006-05-19 | 2016-12-06 | The Foundry, Llc | Apparatus for toxin delivery to the nasal cavity |
| ES2522299T3 (es) | 2007-04-19 | 2014-11-14 | Miramar Labs, Inc. | Sistemas para crear un efecto sobre un tejido especificado usando energía de microondas |
| US20090112085A1 (en) * | 2007-10-30 | 2009-04-30 | University Of Washington | Preoperative localization wire |
| KR101826243B1 (ko) | 2007-12-12 | 2018-02-06 | 미라마 랩스 인코포레이티드 | 마이크로파 에너지를 이용하여 조직을 비침투 방식으로 치료하기 위한 시스템, 장치, 방법 및 과정 |
| US8262703B2 (en) | 2008-01-31 | 2012-09-11 | Vivant Medical, Inc. | Medical device including member that deploys in a spiral-like configuration and method |
| US8221418B2 (en) | 2008-02-07 | 2012-07-17 | Tyco Healthcare Group Lp | Endoscopic instrument for tissue identification |
| EP2271276A4 (en) | 2008-04-17 | 2013-01-23 | Miramar Labs Inc | SYSTEMS, APPARATUS, METHODS AND PROCEDURES FOR NON-INVASIVE TREATMENT OF TISSUE USING MICROWAVE ENERGY |
| US8235981B2 (en) | 2009-06-02 | 2012-08-07 | Vivant Medical, Inc. | Electrosurgical devices with directional radiation pattern |
| US8657870B2 (en) | 2009-06-26 | 2014-02-25 | Biosensors International Group, Ltd. | Implant delivery apparatus and methods with electrolytic release |
| US20110112396A1 (en) | 2009-11-09 | 2011-05-12 | Magnetecs, Inc. | System and method for targeting catheter electrodes |
| US8313486B2 (en) | 2010-01-29 | 2012-11-20 | Vivant Medical, Inc. | System and method for performing an electrosurgical procedure using an ablation device with an integrated imaging device |
| US8728067B2 (en) | 2010-03-08 | 2014-05-20 | Covidien Lp | Microwave antenna probe having a deployable ground plane |
| US8409188B2 (en) | 2010-03-26 | 2013-04-02 | Covidien Lp | Ablation devices with adjustable radiating section lengths, electrosurgical systems including same, and methods of adjusting ablation fields using same |
| US8672933B2 (en) | 2010-06-30 | 2014-03-18 | Covidien Lp | Microwave antenna having a reactively-loaded loop configuration |
| US8740893B2 (en) | 2010-06-30 | 2014-06-03 | Covidien Lp | Adjustable tuning of a dielectrically loaded loop antenna |
| WO2012092016A1 (en) | 2010-12-30 | 2012-07-05 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for diagnosing arrhythmias and directing catheter therapies |
| US9314301B2 (en) | 2011-08-01 | 2016-04-19 | Miramar Labs, Inc. | Applicator and tissue interface module for dermatological device |
| CA2922640A1 (en) * | 2012-08-30 | 2014-03-06 | Celso Bagaoisan | Devices and methods for the treatment of vascular disease |
| WO2015077421A1 (en) * | 2013-11-20 | 2015-05-28 | The Regents Of The University Of California | System and method for depositing a hook at a target within a soft tissue |
| US20160346074A1 (en) * | 2014-06-19 | 2016-12-01 | The Regents Of The University Of California | Conical Vascular Filter Having a Web |
| DE102014226240A1 (de) * | 2014-12-17 | 2016-06-23 | Kuka Roboter Gmbh | System zur roboterunterstützten medizinischen Behandlung |
| AU2017248823B2 (en) | 2016-04-14 | 2022-05-12 | Hologic, Inc. | Tissue localization device and method of use thereof |
-
2017
- 2017-04-14 AU AU2017248823A patent/AU2017248823B2/en active Active
- 2017-04-14 JP JP2018545596A patent/JP2019523656A/ja active Pending
- 2017-04-14 US US15/488,358 patent/US10524875B2/en active Active
- 2017-04-14 EP EP17783327.4A patent/EP3407794A4/en active Pending
- 2017-04-14 CA CA3018761A patent/CA3018761A1/en active Pending
- 2017-04-14 WO PCT/US2017/027796 patent/WO2017181136A1/en active Application Filing
-
2018
- 2018-09-26 US US16/142,920 patent/US11317987B2/en active Active
- 2018-09-28 US US16/146,781 patent/US11185387B2/en active Active
- 2018-09-28 US US16/146,815 patent/US11135033B2/en active Active
-
2022
- 2022-03-17 US US17/697,479 patent/US20220273394A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| AU2017248823A1 (en) | 2018-08-09 |
| EP3407794A1 (en) | 2018-12-05 |
| CA3018761A1 (en) | 2017-10-19 |
| EP3407794A4 (en) | 2019-11-06 |
| US20190029772A1 (en) | 2019-01-31 |
| US20190021812A1 (en) | 2019-01-24 |
| US20170296294A1 (en) | 2017-10-19 |
| US10524875B2 (en) | 2020-01-07 |
| US20190029773A1 (en) | 2019-01-31 |
| US11135033B2 (en) | 2021-10-05 |
| US11185387B2 (en) | 2021-11-30 |
| WO2017181136A1 (en) | 2017-10-19 |
| US20220273394A1 (en) | 2022-09-01 |
| US11317987B2 (en) | 2022-05-03 |
| AU2017248823B2 (en) | 2022-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019523656A (ja) | 組織位置特定装置及びその使用方法 | |
| US11745011B2 (en) | Apparatus and method for positioning, implanting and using a stimulation lead | |
| US11878176B2 (en) | Apparatus and method for positioning, implanting and using a stimulation lead | |
| EP0385604B1 (en) | Surgical needle and localisation needle assembly | |
| US7871425B2 (en) | Minimally-invasive nipple-lift procedure and apparatus | |
| US6093154A (en) | Biopsy needle | |
| US20020059938A1 (en) | Device for accurately marking tissue | |
| WO1992012678A1 (en) | Localization needle assembly | |
| US12023209B2 (en) | Tissue localization marker with biconvex-shaped cross-section and system for localizing tissue | |
| US20230064178A1 (en) | Tissue marking device and methods of use thereof121224.0 | |
| US20230414935A1 (en) | Apparatus and method for positioning, implanting and using a stimulation lead | |
| EP3864507A1 (en) | Tissue localization device and method of use thereof |