JP2019166316A - 組織採取用オフセット装置を備えたカテーテルアセンブリ、システム、及び組織の標的領域を採取する方法 - Google Patents
組織採取用オフセット装置を備えたカテーテルアセンブリ、システム、及び組織の標的領域を採取する方法 Download PDFInfo
- Publication number
- JP2019166316A JP2019166316A JP2019043727A JP2019043727A JP2019166316A JP 2019166316 A JP2019166316 A JP 2019166316A JP 2019043727 A JP2019043727 A JP 2019043727A JP 2019043727 A JP2019043727 A JP 2019043727A JP 2019166316 A JP2019166316 A JP 2019166316A
- Authority
- JP
- Japan
- Prior art keywords
- catheter
- needle
- stylet
- tissue
- lumen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments, e.g. catheter-type instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/0283—Pointed or sharp biopsy instruments with vacuum aspiration, e.g. caused by retractable plunger or by connected syringe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B17/3431—Cannulas being collapsible, e.g. made of thin flexible material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments, e.g. catheter-type instruments
- A61B2010/045—Needles
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Media Introduction/Drainage Providing Device (AREA)
Abstract
Description
本出願は、2018年3月14日に出願された「CATHETER ASSEMBLY WITH OFFSET DEVICE FOR TISSUE SAMPLING」と題された米国特許出願第15/920,966号の一部継続出願であり、その内容をここに援用する。
このセクションにおける記述は、単に、本開示に関する背景情報を提供し、先行技術を構成しない場合もある。
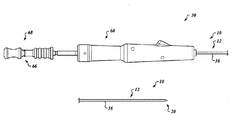
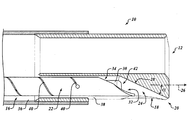
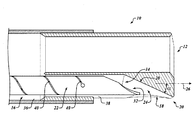
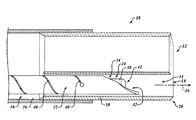
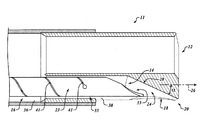
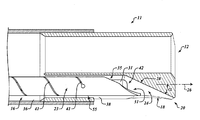
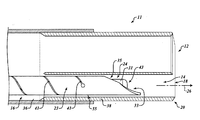
12 カテーテル
14 管腔
18 開口部
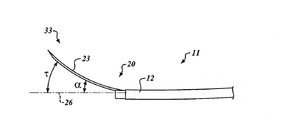
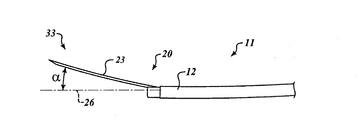
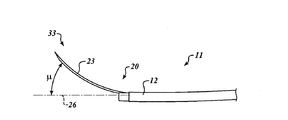
20 遠位端
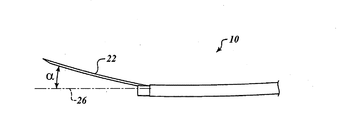
22 可撓性針
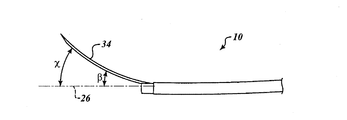
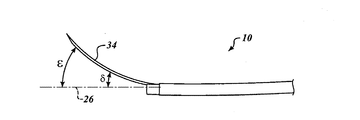
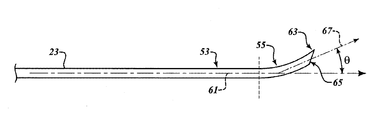
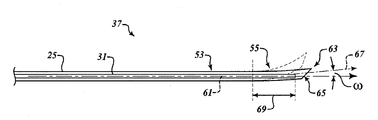
23 湾曲可撓性針
24 オフセット機構
26 軸線
28 ランプ
30 スタイレット
31 直線スタイレット
36 シース
50 システム
53 本体部
55 端部
55 湾曲部
60 ハンドルアセンブリ
61 軸線
65 開口部
66 ルアコネクタ
67 目標軸線
Claims (20)
- 内部に管腔が画定されているカテーテルであって、前記カテーテルの壁は、前記カテーテルの遠位端で前記カテーテルに開口部を画定している、カテーテルと、
管腔内に配置可能であり、前記カテーテルの前記遠位端の前記開口部から前記管腔の軸線から分岐する角度で延ばすことが可能である、湾曲可撓性針と、を備える、カテーテルアセンブリ。 - 前記湾曲可撓性針は、前記管腔内に配置されている間に前記カテーテルの形状に適合するように構成されている、請求項1に記載のカテーテルアセンブリ。
- 前記湾曲可撓性針は、形状記憶合金からなる、請求項1に記載のカテーテルアセンブリ。
- 前記針が前記管腔の前記軸線から分岐する角度を制御するように構成されたオフセット機構を更に含む、請求項1に記載のカテーテルアセンブリ。
- 前記オフセット機構は、前記カテーテルの前記遠位端において前記カテーテル内に画定されているランプを含み、前記ランプは、前記管腔の前記軸線から分岐している傾斜面を有する、請求項4に記載のカテーテルアセンブリ。
- 前記ランプは、前記管腔の前記軸線からのオフセットを約5度〜約25度の範囲で画定している、請求項5に記載のカテーテルアセンブリ。
- 前記オフセット機構は、前記針内に同軸的に配置可能な直線スタイレットを含み、前記直線スタイレットは、前記湾曲可撓性針を通って延びて、前記湾曲可撓性針を前記直線スタイレットの形状に適合させるように構成されている、請求項4に記載のカテーテルアセンブリ。
- 前記湾曲可撓性針が前記直線スタイレットの前記形状に適合する程度は、前記直線スタイレットが前記針の先端に向かって延びる距離に応じる、請求項7に記載のカテーテルアセンブリ。
- 前記直線スタイレットは、前記管腔から引き抜かれるように更に構成されている、請求項7に記載のカテーテルアセンブリ。
- 前記オフセット機構は、
前記カテーテルの前記遠位端において前記カテーテル内に画定されているランプであって、前記ランプは、前記管腔の前記軸線から分岐している傾斜面を有する、ランプと、
前記湾曲可撓性針内に同軸的に配置可能な直線スタイレットであって、前記直線スタイレットは、前記湾曲可撓性針を通って延びて、前記湾曲可撓性針を前記直線スタイレットの形状に適合させるように構成されている、直線スタイレットと、を含む、請求項1に記載のカテーテルアセンブリ。 - 組織の標的領域を採取するためのシステムであって、前記システムは、
ハンドルアセンブリと、
前記ハンドルアセンブリに動作可能に結合されたカテーテルアセンブリであって、前記カテーテルアセンブリは、採取される組織の標的領域に向けて体腔内に挿入可能に構成されている、カテーテルアセンブリと、を備え、前記カテーテルアセンブリは、
内部に管腔が画定されているカテーテルであって、前記カテーテルの壁は、前記カテーテルの遠位端で前記カテーテルに開口部を画定している、カテーテルと、
管腔内に配置可能であり、前記カテーテルの前記遠位端の前記開口部から前記管腔の軸線から分岐する角度で延ばすことが可能である、湾曲可撓性針と、を備える、システム。 - 前記針が前記管腔の前記軸線から分岐する角度を制御するように構成されたオフセット機構を更に含む、請求項11に記載のシステム。
- 前記オフセット機構は、前記カテーテルの前記遠位端において前記カテーテル内に画定されているランプを含み、前記ランプは、前記管腔の前記軸線から分岐している傾斜面を有する、請求項12に記載のシステム。
- 前記オフセット機構は、前記針内に同軸的に配置可能な直線スタイレットを含み、前記直線スタイレットは、前記湾曲可撓性針を通って延びて、前記湾曲可撓性針を前記直線スタイレットの形状に適合させるように構成されている、請求項12に記載のシステム。
- 前記オフセット機構は、
前記カテーテルの前記遠位端において前記カテーテル内に画定されているランプであって、前記ランプは、前記管腔の前記軸線から分岐している傾斜面を有する、ランプと、
前記針内に同軸的に配置可能な直線スタイレットであって、前記直線スタイレットは、前記湾曲可撓性針を通って延びて、前記湾曲可撓性針を前記直線スタイレットの形状に適合させるように構成されている、直線スタイレットと、を含む、請求項12に記載のシステム。 - 前記スタイレットは、前記ハンドルアセンブリによって前記管腔から引き抜かれるように更に構成され、前記システムは、
前記スタイレットを前記管腔から引き抜いた状態で、前記ハンドルアセンブリを介して前記針に動作可能に結合可能な真空装置を更に含む、請求項15に記載のシステム。 - 前記ハンドルアセンブリは、前記カテーテルにトルクを与えるように構成されている、請求項11に記載のシステム。
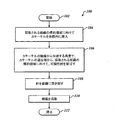
- 組織の標的領域を採取する方法であって、前記方法は、
採取される組織の標的領域に向けてカテーテルを体腔内に挿入することと、
前記カテーテルの軸線から分岐する角度で、前記カテーテルの遠位端から、採取される組織の前記標的領域に向けて、湾曲可撓性針を延ばすことと、
前記針を前記組織に突き刺すことと、
前記組織を採取することと、を含む、方法。 - 前記カテーテルの前記遠位端において前記カテーテル内に画定されているランプを越えて前記湾曲可撓性針を延ばすことであって、前記ランプは、前記カテーテルの前記軸線から分岐している傾斜面を有する、ことと、
前記湾曲可撓性針内に同軸的に配置可能な直線スタイレットを移動させ、前記湾曲可撓性針を前記直線スタイレットの形状に適合させることと、
の少なくとも一方によって前記湾曲可撓性針が前記カテーテルの前記軸線から分岐する角度を制御することを更に含む、請求項18に記載の方法。 - 採取される組織の前記標的領域に向けて前記カテーテルを前記体腔内に挿入した後、かつ前記カテーテルの前記軸線から分岐する角度で、前記カテーテルの前記遠位端から、採取される組織の前記標的領域に向けて、前記湾曲可撓性針を延ばす前に、前記カテーテルの前記遠位端に画定された開口部が、採取される組織の前記標的領域に向けて配向されるように、前記カテーテルにトルクを与えることを更に含む、請求項18に記載の方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/920,966 US20190282218A1 (en) | 2018-03-14 | 2018-03-14 | Catheter Assembly With Offset Device For Tissue Sampling |
| US15/920,966 | 2018-03-14 | ||
| US15/933,372 | 2018-03-22 | ||
| US15/933,372 US10912542B2 (en) | 2018-03-14 | 2018-03-22 | Catheter assembly with offset device for tissue sampling |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019166316A true JP2019166316A (ja) | 2019-10-03 |
| JP7338994B2 JP7338994B2 (ja) | 2023-09-05 |
Family
ID=66380446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019043727A Active JP7338994B2 (ja) | 2018-03-14 | 2019-03-11 | 組織採取用オフセット装置を備えたカテーテルアセンブリ、システム、及び組織の標的領域を採取する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10912542B2 (ja) |
| JP (1) | JP7338994B2 (ja) |
| CN (2) | CN118614966A (ja) |
| DE (1) | DE102019105316A1 (ja) |
| GB (1) | GB2572861B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020237420A1 (en) | 2019-05-24 | 2020-12-03 | Becton, Dickinson And Company | Needle-tract assistant including components and methods thereof |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013516292A (ja) * | 2010-01-07 | 2013-05-13 | リリーバント メドシステムズ、インコーポレイテッド | 骨を通して器具を誘導するシステム及び方法 |
| JP2013176559A (ja) * | 2012-02-28 | 2013-09-09 | Spiration Inc | 肺生検針 |
| US20160000415A1 (en) * | 2013-03-04 | 2016-01-07 | Rambam Health Corporation | Multiple-tissue fna sampling |
| JP2017515620A (ja) * | 2014-04-02 | 2017-06-15 | ザ ボード オブ トラスティーズ オブ ザ リーランド スタンフォード ジュニア ユニバーシティーThe Board Of Trustees Of The Leland Stanford Jr.University | 生検デバイス、システム及びその使用方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6283951B1 (en) * | 1996-10-11 | 2001-09-04 | Transvascular, Inc. | Systems and methods for delivering drugs to selected locations within the body |
| US6203524B1 (en) * | 1997-02-10 | 2001-03-20 | Emx, Inc. | Surgical and pharmaceutical site access guide and methods |
| JP4125814B2 (ja) * | 1998-03-04 | 2008-07-30 | Hoya株式会社 | 超音波内視鏡 |
| WO2002055130A2 (en) * | 2000-12-11 | 2002-07-18 | Pharmaspec Corporation | Transluminal drug delivery catheter |
| US8613744B2 (en) * | 2002-09-30 | 2013-12-24 | Relievant Medsystems, Inc. | Systems and methods for navigating an instrument through bone |
| US20050159676A1 (en) * | 2003-08-13 | 2005-07-21 | Taylor James D. | Targeted biopsy delivery system |
| US8088072B2 (en) * | 2007-10-12 | 2012-01-03 | Gynesonics, Inc. | Methods and systems for controlled deployment of needles in tissue |
| US9782565B2 (en) * | 2008-10-01 | 2017-10-10 | Covidien Lp | Endoscopic ultrasound-guided biliary access system |
| WO2011062736A1 (en) * | 2009-11-17 | 2011-05-26 | Cook Incorporated | Deflectable biopsy device |
| US20120053485A1 (en) * | 2010-09-01 | 2012-03-01 | Salient Surgical Technologies, Inc. | Catheter Having Needle And Expandable Support Member And Methods Of Use |
| US20140180164A1 (en) * | 2012-12-21 | 2014-06-26 | Cook Medical Technologies Llc | Targetable biopsy needle set and method of using same |
| US10433821B2 (en) * | 2013-01-08 | 2019-10-08 | Sanovas Intellectual Property, Llc | Precision directed medical instruments |
| WO2014112518A1 (ja) * | 2013-01-21 | 2014-07-24 | 富士フイルム株式会社 | 組織採取装置 |
| US20180116645A1 (en) * | 2015-04-28 | 2018-05-03 | Michael NOSLER | Stylet and Needle Combinations Used to Collect Tissue Samples During Endoscopic Procedures |
| US10524864B2 (en) * | 2015-08-17 | 2020-01-07 | Albert J. Sinusas | Real-time molecular imaging and minimally-invasive detection in interventional cardiology |
| US10327791B2 (en) * | 2015-10-07 | 2019-06-25 | Medtronic Vascular, Inc. | Occlusion bypassing apparatus with a re-entry needle and a distal stabilization balloon |
| US10835327B2 (en) * | 2017-09-05 | 2020-11-17 | Acclarent, Inc. | Sensor guided instrument with penetrating feature |
-
2018
- 2018-03-22 US US15/933,372 patent/US10912542B2/en active Active
-
2019
- 2019-03-03 DE DE102019105316.1A patent/DE102019105316A1/de active Pending
- 2019-03-11 CN CN202410868915.8A patent/CN118614966A/zh active Pending
- 2019-03-11 CN CN201910181797.2A patent/CN110269646B/zh active Active
- 2019-03-11 JP JP2019043727A patent/JP7338994B2/ja active Active
- 2019-03-13 GB GB1903410.7A patent/GB2572861B/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013516292A (ja) * | 2010-01-07 | 2013-05-13 | リリーバント メドシステムズ、インコーポレイテッド | 骨を通して器具を誘導するシステム及び方法 |
| JP2013176559A (ja) * | 2012-02-28 | 2013-09-09 | Spiration Inc | 肺生検針 |
| US20160000415A1 (en) * | 2013-03-04 | 2016-01-07 | Rambam Health Corporation | Multiple-tissue fna sampling |
| JP2017515620A (ja) * | 2014-04-02 | 2017-06-15 | ザ ボード オブ トラスティーズ オブ ザ リーランド スタンフォード ジュニア ユニバーシティーThe Board Of Trustees Of The Leland Stanford Jr.University | 生検デバイス、システム及びその使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110269646A (zh) | 2019-09-24 |
| US20190282217A1 (en) | 2019-09-19 |
| GB2572861B (en) | 2022-09-21 |
| GB201903410D0 (en) | 2019-04-24 |
| DE102019105316A1 (de) | 2019-09-19 |
| US10912542B2 (en) | 2021-02-09 |
| CN110269646B (zh) | 2024-07-16 |
| CN118614966A (zh) | 2024-09-10 |
| JP7338994B2 (ja) | 2023-09-05 |
| GB2572861A (en) | 2019-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110602994B (zh) | 超弹性医疗器械 | |
| JP4874259B2 (ja) | 標的部位にアクセスするための操縦可能な装置 | |
| US7918819B2 (en) | Variable curve catheter | |
| US10143448B2 (en) | Medical device comprising a curved needle | |
| JP2024014942A (ja) | 組織サンプリングのためのオフセットデバイスを備えるカテーテルアセンブリ | |
| US20220054763A1 (en) | Variable pitch flexible needle | |
| JP2012513286A (ja) | 超音波視覚化内視鏡用アクセス装置 | |
| US20220347394A1 (en) | Sheaths for needle delivery | |
| US11950805B2 (en) | Sharp turning steerable needle | |
| JP7338994B2 (ja) | 組織採取用オフセット装置を備えたカテーテルアセンブリ、システム、及び組織の標的領域を採取する方法 | |
| CN209450624U (zh) | 带推送杆的定位穿刺套件 | |
| US20190328371A1 (en) | Ramped biopsy needle device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20201005 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230718 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230824 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7338994 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |