JP2019100307A - 鞍乗型車両 - Google Patents
鞍乗型車両 Download PDFInfo
- Publication number
- JP2019100307A JP2019100307A JP2017235054A JP2017235054A JP2019100307A JP 2019100307 A JP2019100307 A JP 2019100307A JP 2017235054 A JP2017235054 A JP 2017235054A JP 2017235054 A JP2017235054 A JP 2017235054A JP 2019100307 A JP2019100307 A JP 2019100307A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- load
- angle
- engine
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K23/00—Rider-operated controls specially adapted for cycles, i.e. means for initiating control operations, e.g. levers, grips
- B62K23/08—Rider-operated controls specially adapted for cycles, i.e. means for initiating control operations, e.g. levers, grips foot actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/06—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with spur gear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M25/00—Actuators for gearing speed-change mechanisms specially adapted for cycles
- B62M25/02—Actuators for gearing speed-change mechanisms specially adapted for cycles with mechanical transmitting systems, e.g. cables, levers
- B62M25/06—Actuators for gearing speed-change mechanisms specially adapted for cycles with mechanical transmitting systems, e.g. cables, levers foot actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M7/00—Motorcycles characterised by position of motor or engine
- B62M7/02—Motorcycles characterised by position of motor or engine with engine between front and rear wheels
- B62M7/04—Motorcycles characterised by position of motor or engine with engine between front and rear wheels below the frame
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/04—Ratio selector apparatus
- F16H59/044—Ratio selector apparatus consisting of electrical switches or sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/08—Multiple final output mechanisms being moved by a single common final actuating mechanism
- F16H63/16—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism
- F16H63/18—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism the final actuating mechanism comprising cams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/10—Road Vehicles
- B60Y2200/12—Motorcycles, Trikes; Quads; Scooters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H2059/0234—Selectors for gearings using foot control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H2059/0239—Up- and down-shift or range or mode selection by repeated movement
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H2059/6807—Status of gear-change operation, e.g. clutch fully engaged
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
- F16H63/502—Signals to an engine or motor for smoothing gear shifts
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Transmission Device (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Gear-Shifting Mechanisms (AREA)
Abstract
【課題】コストの増大を抑制しつつ運転者の意図によるシフト操作が行われたか否かを正確に判定することにより変速機のギア比を切り替えるためのエンジンの出力調整を適切に行うことが可能な鞍乗型車両を提供する。【解決手段】荷重センサSE5は、運転者がシフトペダル210を操作することにより加えられた荷重を検出する。シフトカムセンサSE4は、変速機5のシフトカムの回転角度を検出する。荷重の検出値が荷重しきい値を超えたという荷重条件が満たされたか否かが判定される。回転角度の検出値が角度しきい値を超えたという角度条件が満たされたか否かが判定される。荷重条件および角度条件が満たされる場合に運転者の意図によるシフト操作が行われたと判定され、ギア比を切り替えるためのエンジン出力調整が行われる。荷重条件および角度条件の少なくとも一方が満たされていない場合にシフト操作が行われていないと判定される。【選択図】図1
Description
本発明は、変速機のギア比を切り替えるためにエンジンの出力を調整することが可能な鞍乗型車両に関する。
レース等においては、迅速なギアシフトが求められる。そのため、運転者は、クラッチ操作を行わずにギアシフト(以下、クラッチレスシフトと呼ぶ。)を行う場合がある。この場合、クランクシャフトからメインシャフトへ動力が伝達されている状態でギアシフトが行われるので、ギアの切り離しが困難である。そこで、従来より、クラッチレスシフトを補助するシステムが開発されている。
例えば、特許文献1に記載された制御システムにおいては、シフトペダルに働く荷重が荷重センサにより検出される。検出された荷重の値が予め定められたしきい値以上であるか否かに基づいて運転者によりシフト操作が検出される。シフト操作が検出されることにより、エンジンの出力調整が行われる。
上記の制御システムにおいては、シフト操作が正確に検出されることにより、エンジンの出力調整が適切に行われる。しかしながら、ノイズの影響または荷重センサの性能により、運転者の意図に反してシフト操作が検出される可能性がある。
シフト操作を正確に検出するために、優れた耐ノイズ性および耐久性を有しかつ高い精度でシフトペダルに働く荷重を検出することが可能な荷重センサを用いることが考えられる。しかしながら、このような荷重センサは高価である。
本発明の目的は、コストの増大を抑制しつつ運転者の意図によるシフト操作が行われたか否かを正確に判定することにより変速機のギア比を切り替えるためのエンジンの出力調整を適切に行うことが可能な鞍乗型車両を提供することである。
(1)本発明に係る鞍乗型車両は、エンジンと、駆動輪と、シフトカムを有するとともにエンジンにより発生されるトルクを駆動輪に伝達する変速機と、変速機のギア比を切り替えるために運転者により操作可能なシフトペダルと、シフトペダルが押し上げられるまたは押し下げられることにより動作する駆動部と、駆動部の動作に連動してシフトカムを回転させる回転駆動部材と、駆動部に設けられ、シフトペダルが押し上げられるまたは押し下げられることにより駆動部に加えられた荷重を検出する荷重検出器と、シフトカムの回転角度を検出する角度検出部と、荷重検出器により検出された荷重が荷重しきい値を超えたという荷重条件が満たされたか否かを判定する荷重判定部と、角度検出部により検出された回転角度が予め定められた角度しきい値を超えたという角度条件が満たされたか否かを判定する角度判定部と、荷重条件および角度条件が満たされた場合に変速機のギア比を切り替えるためのシフト操作が行われたと判定し、荷重条件および角度条件の少なくとも一方が満たされていないと判定された場合にシフト操作が行われていないと判定するシフト判定部と、シフト判定部によりシフト操作が行われたと判定された場合に、変速機のギア比を切り替えるためにエンジンの出力を調整する制御部とを備える。
その鞍乗型車両においては、シフトペダルが押し上げられるまたは押し下げられることにより荷重検出器の検出した荷重が荷重しきい値を超えたという荷重条件が満たされたか否かが判定される。また、角度検出部の検出したシフトカムの回転角度が予め定められた角度しきい値を超えたという角度条件が満たされたか否かが判定される。荷重条件および角度条件が満たされたと判定された場合には、シフト操作が行われたと判定される。一方、荷重条件および角度条件の少なくとも一方が満たされていないと判定された場合には、シフト操作が行われていないと判定される。
それにより、シフト操作が行われていないときに荷重条件が満たされたと誤判定される場合でも、角度条件が満たされないときにはシフト操作が行われていないと判定される。したがって、シフト操作の有無を正確に判定するために、優れた耐ノイズ性および耐久性を有しかつ高い精度で荷重を検出することが可能な高価な荷重検出器を用意する必要がない。
また、シフト操作が行われていないときに角度条件が満たされたと誤判定される場合でも、荷重条件が満たされないときにはシフト操作が行われていないと判定される。したがって、シフト操作の有無を正確に判定するために、優れた耐ノイズ性および耐久性を有しかつ高い精度で角度情報を取得することが可能な高価な角度検出部を用意する必要がない。
上記のように、荷重がシフトペダルに加えられたか否かの判定と、シフトカムが回転したか否かの判定とに基づいて、運転者の意志によるシフトペダルの操作が判定される。
これらの結果、コストの増大を抑制しつつ運転者の意図によるシフト操作が行われたか否かを正確に判定することにより変速機のギア比を切り替えるためのエンジンの出力調整を適切に行うことが可能となる。
なお、荷重しきい値がシフトカムを実際に回転させるために必要とされる荷重よりも低く設定されている場合には、運転者の意図によらないシフトペダルの操作により、荷重条件が満たされたと判定される可能性がある。このような場合でも、回転駆動部材が角度しきい値を超えて回転しない限り角度条件が満たされたと判定されることはない。したがって、運転者の意図によらないシフトペダルの操作によりエンジンの出力調整が行われることが防止される。
(2)荷重判定部は、加えられた荷重が予め定められた時間連続して荷重しきい値を超えたことを荷重検出器の出力信号が示す場合に荷重条件が満たされたと判定してもよい。
この場合、ノイズの影響により荷重検出器の出力信号が変動した場合に、荷重条件が満たされたと誤判定されることが防止される。
(3)変速機は、シフトカムが回転することによりシフトカムの回転角度に応じてシフトカムの軸方向に移動する1または複数のシフトフォークをさらに有し、変速機のギア比は、1または複数のシフトフォークの少なくとも1つが軸方向に移動することにより切り替えられ、シフトカムは、当該シフトカムが回転した場合に1または複数のシフトフォークが軸方向に移動しない遊び角度を有するように構成され、角度しきい値は、遊び角度を除く角度に設定されてもよい。
この場合、角度しきい値が遊び角度を除く角度に設定されるので、角度条件に基づいて運転者の意図によるシフト操作が行われたか否かを適切に判定することが可能となる。
(4)シフトペダルは、変速機のシフトアップのために運転者により押し上げられるように構成されるとともに、変速機のシフトダウンのために運転者により押し下げられるように構成され、駆動部および回転駆動部材は、シフトアップのためのシフトペダルの操作によりシフトカムを第1の回転方向に回転させ、シフトダウンのためのシフトペダルの操作によりシフトカムを第1の回転方向とは逆の第2の回転方向に回転させてもよい。
この場合、運転者は、シフトペダルを押し上げることにより変速機のシフトアップを行うことができる。このとき、シフトカムは第1の回転方向に回転する。また、運転者は、シフトペダルを押し下げることにより変速機のシフトダウンを行うことができる。このとき、シフトカムは第2の回転方向に回転する。
上記の構成によれば、運転者は、鞍乗型車両の減速時にシフトペダルを踏み込むことにより容易にシフトダウンを行うことができる。
(5)シフトペダルは、変速機のシフトダウンのために運転者により押し上げられるように構成されるとともに、変速機のシフトアップのために運転者により押し下げられるように構成され、駆動部および回転駆動部材は、シフトアップのためのシフトペダルの操作によりシフトカムを第1の回転方向に回転させ、シフトダウンのためのシフトペダルの操作によりシフトカムを第1の回転方向とは逆の第2の回転方向に回転させてもよい。
この場合、運転者は、シフトペダルを押し下げることにより変速機のシフトアップを行うことができる。このとき、シフトカムは第1の回転方向に回転する。また、運転者は、シフトペダルを押し上げることにより変速機のシフトダウンを行うことができる。このとき、シフトカムは第2の回転方向に回転する。
上記の構成によれば、運転者は、鞍乗型車両の旋回時にシフトペダルを踏み込むことにより容易にシフトアップを行うことができる。
(6)鞍乗型車両は、エンジンがエンジンから駆動輪にトルクが伝達される駆動状態にあるか否かを判定する第1の状態判定部をさらに備え、角度判定部は、シフトカムの第1の回転方向への回転を判定可能に構成され、制御部は、エンジンが駆動状態にないことが判定されかつシフトカムの第1の回転方向への回転が判定される場合に、変速機のギア比を切り替えるためのエンジンの出力調整を行わなくてもよい。
上記の構成によれば、エンジンが被駆動状態にあるときにシフトアップのためのエンジンの出力調整が行われない。それにより、エンジンが被駆動状態にある鞍乗型車両の速度が急激に上昇することが防止される。
(7)鞍乗型車両は、エンジンが駆動輪からエンジンにトルクが伝達される被駆動状態にあるか否かを判定する第2の状態判定部をさらに備え、角度判定部は、シフトカムの第2の回転方向への回転を判定可能に構成され、制御部は、エンジンが被駆動状態にないことが判定されかつシフトカムの第2の回転方向への回転が判定される場合に、変速機のギア比を切り替えるためのエンジンの出力調整を行わなくてもよい。
上記の構成によれば、エンジンが駆動状態にあるときにシフトダウンのためのエンジンの出力調整が行われない。それにより、シフトダウンの直後における駆動状態から被駆動状態への急激な切り替わりの発生が低減されるので、変速機に過剰な負荷が加わることが低減される。したがって、変速機の長寿命化が実現される。
(8)荷重しきい値の絶対値は、荷重検出器の検出限界値の絶対値よりも低い値に設定されてもよい。
この場合、荷重しきい値の絶対値が荷重検出器の検出限界値の絶対値に等しくなるように設定される場合に比べて、荷重検出器の検出した荷重が荷重しきい値を超えたか否かをより正確に判定することができる。
本発明によれば、コストの増大を抑制しつつ運転者の意図によるシフト操作が行われたか否かを正確に判定することにより変速機のギア比を切り替えるためのエンジンの出力調整を適切に行うことが可能となる。
以下、本発明の一実施の形態に係る鞍乗型車両について図面を参照しつつ説明する。以下の説明においては、鞍乗型車両の一例として自動二輪車を説明する。
[1]自動二輪車の概略構成
図1は、本発明の一実施の形態に係る自動二輪車の側面図である。図1の自動二輪車100においては、本体フレーム101の前端にヘッドパイプ102が設けられる。ヘッドパイプ102にフロントフォーク103が左右方向に揺動可能に設けられる。フロントフォーク103の下端に前輪104が回転可能に支持される。ヘッドパイプ102の上端にはハンドル105が設けられる。
図1は、本発明の一実施の形態に係る自動二輪車の側面図である。図1の自動二輪車100においては、本体フレーム101の前端にヘッドパイプ102が設けられる。ヘッドパイプ102にフロントフォーク103が左右方向に揺動可能に設けられる。フロントフォーク103の下端に前輪104が回転可能に支持される。ヘッドパイプ102の上端にはハンドル105が設けられる。
ハンドル105には、クラッチレバー105a、アクセルグリップ(図示せず)およびアクセルセンサSE1が設けられる。アクセルセンサSE1は、運転者によるアクセルグリップの操作量(以下、アクセル開度と称する)を検出する。ハンドル105には、運転者によるクラッチレバー105aの操作量を検出するクラッチセンサ(図示せず)がさらに設けられている。
図1に示すように、本体フレーム101はエンジン107を支持する。エンジン107には、吸気管79および排気管118が取り付けられる。エンジン107の下部には、クランクケース109が設けられている。クランクケース109内には、クランクセンサSE2が設けられる。クランクセンサSE2は、エンジン107のクランク軸2(図2)の回転角度を検出する。
また、吸気管79内には、スロットルセンサSE3が設けられる。スロットルセンサSE3は、後述するETV(Electronic Throttle Valve;電子制御式スロットルバルブ)82(図8)の開度を検出する。
クランクケース109の後部にミッションケース110が取り付けられる。ミッションケース110内には、シフトカムセンサSE4、後述する変速機5(図2)および後述するシフト機構7(図2)が設けられる。シフトカムセンサSE4は、後述するシフトカム7b(図2)の回転角度を検出する。
ミッションケース110の側部には、シフトペダル210が設けられる。シフトペダル210は、後述するペダルアーム211(図2)に一体的に取り付けられる。シフトペダル210の後方にはバックステップ120が設けられる。バックステップ120は、本体フレーム101により支持される。
さらに、ミッションケース110の側部には、第1のリンク機構220が設けられる。第1のリンク機構220には、荷重センサSE5が設けられる。運転者は、シフトぺダル210に荷重を加えることによりシフトぺダル210を操作する。荷重センサSE5は、運転者がシフトペダル210を操作することにより後述する第1のリンク軸221(図4)に加えられた荷重を検出する。
エンジン107の上方に燃料タンク112が設けられる。燃料タンク112の後方には、2つのシート113が前後に並ぶように設けられる。前方のシート113の下方には、ECU(Electronic Control Unit;電子制御ユニット)50が設けられる。
ECU50は、CPU(中央演算処理装置)、ROM(リードオンリメモリ)およびRAM(ランダムアクセスメモリ)を含む。ROMは、例えば不揮発性メモリからなり、システムプログラムおよびCPUの制御プログラム等を記憶する。RAMは、例えば揮発性メモリからなり、CPUの作業領域として用いられるとともに、各種データを一時的に記憶する。CPUは、ROMに記憶された制御プログラムを実行することにより種々の機能を実現する。CPUにより実現される各種機能の詳細は後述する。
エンジン107の後方に延びるように、本体フレーム101にリアアーム114が接続される。リアアーム114は、後輪115および後輪ドリブンスプロケット116を回転可能に支持する。後輪ドリブンスプロケット116と後述する後輪ドライブスプロケット5e(図2)との間にチェーン117が架け渡される。
[2]変速機およびシフト機構
図2は、図1のミッションケース110内に設けられる変速機5およびシフト機構7の概略構成を説明するための図である。図2に示すように、変速機5は、メイン軸5aおよびドライブ軸5bを備える。メイン軸5aは、クラッチ3に接続されている。メイン軸5aには複数のギア5cが取り付けられており、ドライブ軸5bには複数のギア5dおよび後輪ドライブスプロケット5eが取り付けられている。
図2は、図1のミッションケース110内に設けられる変速機5およびシフト機構7の概略構成を説明するための図である。図2に示すように、変速機5は、メイン軸5aおよびドライブ軸5bを備える。メイン軸5aは、クラッチ3に接続されている。メイン軸5aには複数のギア5cが取り付けられており、ドライブ軸5bには複数のギア5dおよび後輪ドライブスプロケット5eが取り付けられている。
例えば、図1のエンジン107により発生されるクランク軸2のトルクはクラッチ3に伝達される。クラッチ3が接続状態にある場合、クラッチ3に伝達されたトルクは変速機5のメイン軸5aに伝達される。メイン軸5aに伝達されたトルクは、ギア5c,5dを介してドライブ軸5bに伝達される。ドライブ軸5bに伝達されたトルクは、後輪ドライブスプロケット5e、チェーン117(図1)および後輪ドリブンスプロケット116(図1)を介して後輪115(図1)に伝達される。それにより、後輪115が回転する。エンジン107の作動時においては、クランクセンサSE2により検出されたクランク軸2の回転角度がECU50に出力される。
図3は、メイン軸5aに伝達されたトルクがドライブ軸5bに伝達されるメカニズムを説明するための概略図である。図3(a)および図3(b)においては、複数のギア5cのうちの2つのギア5c1,5c2が示され、複数のギア5dのうちの2つのギア5d1,5d2が示されている。
ギア5c1は、メイン軸5aの軸方向においては移動可能であるが、メイン軸5aの回転方向においてはメイン軸5aに固定されている。ギア5c2は、メイン軸5aの軸方向における移動が禁止された状態でメイン軸5aに回転可能に取り付けられている。
ギア5d1は、ドライブ軸5bの軸方向における移動が禁止された状態でドライブ軸5bに回転可能に取り付けられている。ギア5c1とギア5d1とが噛み合っている場合には、メイン軸5aが回転することによりギア5d1が回転する。
ギア5d2は、ドライブ軸5bの軸方向においては移動可能であるが、ドライブ軸5bの回転方向においてはドライブ軸5bに固定されている。そのため、ドライブ軸5bは、ギア5d2が回転することにより回転する。
図3(a)に示すように、ギア5d2がギア5d1から離間している場合には、ギア5d1は、ドライブ軸5bの回転方向においてドライブ軸5bに固定されていない。この場合、メイン軸5aが回転することにより、ギア5d1がメイン軸5aの回転に連動して回転するが、ドライブ軸5bはメイン軸5aの回転に連動することなく回転するかまたは停止する。すなわち、変速機5はエンジン107と後輪115との間でトルクを伝達しない。
一方、図3(b)に示すように、ギア5d2がギア5d1に近づくように軸方向に移動する。これにより、ギア5d2の側面に設けられた凸状のドグ5fが、ギア5d1の側面に設けられた凹状のドグ穴(図示せず)に嵌め込まれると、ギア5d1とギア5d2とが固定される。この場合、メイン軸5aが回転することにより、ギア5d1とともにギア5d2がメイン軸5aの回転に連動して回転する。それにより、ドライブ軸5bがギア5d2とともにメイン軸5aの回転に連動して回転する。
なお、図3(a)の状態から、ギア5c1をギア5c2に近接させ、ギア5c1とギア5c2とを固定した場合には、ギア5c2はギア5c1とともに回転する。この場合、ギア5d2は、メイン軸5aおよびギア5c2の回転に連動して回転する。それにより、ドライブ軸5bがギア5d2とともにメイン軸5aの回転に連動して回転する。以下、ギア5c1,5d2のように、メイン軸5aまたはドライブ軸5b上を軸方向に移動するギアをスライドギアと称する。また、ギア5c2,5d1のように、メイン軸5aまたはドライブ軸5bの軸方向における移動が禁止されたギアをフィックスギアと称する。
このように、変速機5においては、1または複数のスライドギアを移動させ、1または複数のスライドギアと1または複数のフィックスギアとの組み合わせを変更することにより、メイン軸5aからドライブ軸5bへのトルクの伝達経路を変更することができる。それにより、メイン軸5aの回転速度に対してドライブ軸5bの回転速度を相対的に変更することができる。
変速機5において、1または複数のスライドギアを移動させるために、図2のシフト機構7が用いられる。図2に示すように、シフト機構7は、シフトペダル210、ペダルアーム211、第1のリンク機構220、シフト軸250、第2のリンク機構260、ストッパープレート300、シフトカム7bおよびシフトフォークc1〜c3を含む。
後述するように、運転者はシフトペダル210を押し下げるかまたは押し上げる。この場合、図2に太い矢印で示すように、シフトペダル210に加わる荷重は、ペダルアーム211および第1のリンク機構220を通してシフト軸250に伝達される。これにより、シフト軸250が回転する。さらに、シフト軸250において発生するトルクは、第2のリンク機構260を通してシフトカム7bに伝達される。それにより、シフトカム7bが回転する。
シフトカム7bには、カム溝d1〜d3が形成されている。シフトフォークc1〜c3は、摺動ピンe1〜e3によりカム溝d1〜d3にそれぞれ連結される。シフトカム7bの一端には、ストッパープレート300が取り付けられる。さらに、シフトカム7bの一端部近傍には、ストッパープレート300に近接してシフトカムセンサSE4が設けられる。エンジン107の作動時には、シフトカムセンサSE4により検出されたシフトカム7bの回転角度がECU50に出力される。
運転者によるシフトぺダル210の操作によりシフトカム7bが回転すると、シフトフォークc1〜c3に連結される摺動ピンe1〜e3が各カム溝d1〜d3内を移動する。この場合、シフトフォークc1〜c3のいずれかがシフトカム7bの軸方向に移動し、1または複数のスライドギアが移動される。
本例の変速機5は、ニュートラルポジションおよび1〜6速のギアポジションを有する。シフトカム7b(図2)が一方向(以下、第1の回転方向と呼ぶ。)に回転する場合、変速機5のギアポジションが1速、2速、3速、4速、5速および6速の順に切り替えられる。それにより、変速機5のギア比が順に高くなる(シフトアップ)。一方、シフトカム7b(図2)が第1の回転方向とは逆方向(以下、第2の回転方向と呼ぶ。)に回転すると、変速機5のギアポジションが6速、5速、4速、3速、2速および1速の順に切り替えられる。それにより、変速機5のギア比が順に低くなる(シフトダウン)。
ここで、運転者は、図1のクラッチレバー105aを操作することなく変速機5のギア比を切り替える、いわゆるクラッチレスシフトの意図を持ってシフトペダル210を操作する場合がある。以下の説明では、運転者が変速機5のギア比を切り替える意図を持って行うシフトぺダル210の操作をシフト操作と呼ぶ。本実施の形態では、シフト操作が行われたか否かが図2の荷重センサSE5およびシフトカムセンサSE4からの出力信号に基づいて判定される。シフト操作が行われたか否かの判定方法の詳細は後述する。クラッチレバー105aが操作されることなくシフト操作が行われた場合、変速機5のギア比を切り替えるためのエンジン107の出力調整が適宜行われる。
なお、シフト操作が行われたか否かの判定は、クラッチ3が接続状態にあるときに行われる。クラッチ3が接続状態にあるか否かは、例えば上記のクラッチセンサの検出値が予め定められた値を超えたか否かに基づいて判定することができる。
[3]運転者によるシフトペダルの操作例と荷重センサによる荷重の検出
図4は、図1の第1のリンク機構220、シフトペダル210およびそれらの周辺部材を示す自動二輪車100の左側面図である。図4に示すように、自動二輪車100の左側面においては、前後方向に延びるようにペダルアーム211が設けられている。シフトペダル210は、ペダルアーム211の後端に取り付けられる。
図4は、図1の第1のリンク機構220、シフトペダル210およびそれらの周辺部材を示す自動二輪車100の左側面図である。図4に示すように、自動二輪車100の左側面においては、前後方向に延びるようにペダルアーム211が設けられている。シフトペダル210は、ペダルアーム211の後端に取り付けられる。
ペダルアーム211のうち、中央部よりもやや前端に近い部分に取付部212が設けられている。ペダルアーム211の取付部212は、本体フレーム101(図1)から左方へ水平に延びる図示しない支持軸に回転可能に支持される。
ペダルアーム211の上方にシフト軸250が配置されている。ペダルアーム211とシフト軸250とを接続するように第1のリンク機構220が設けられる。具体的には、第1のリンク機構220は、第1のリンク軸221および第2のリンク軸222を含む。第2のリンク軸222の一端は、当該第2のリンク軸222がシフト軸250とともに回転可能となるようにかつシフト軸250から車両前方に延びるように、シフト軸250に固定される。第1のリンク軸221の一端はペダルアーム211の前端に回転可能に接続されている。第1のリンク軸221の他端は第2のリンク軸222の他端に回転可能に接続されている。
第1のリンク軸221の略中央部に荷重センサSE5が設けられている。荷重センサSE5は例えば弾性式(歪ゲージ式、静電容量式等)または磁歪式のロードセルからなり、第1のリンク軸221に加えられた引張荷重および圧縮荷重を検出可能に構成される。
運転者は、バックステップ120に左足を乗せた状態で、バックステップ120を支点としてシフトペダル210を押し下げまたは押し上げることによりシフトペダル210を操作する。
図2のシフト機構7には、リターン式の変速方式が適用される。そのシフト機構7においては、シフトペダル210が押し上げられることにより、1速から6速までのシフトアップのための動作が行われる。また、シフトペダル210が押し下げられることにより、ニュートラルポジションから1速へギアポジションを切り替えるための動作または6速から1速までのシフトダウンのための動作が行われる。
ここで、図4に太い一点鎖線の矢印SU1で示すように、運転者の左足FLによりシフトペダル210が押し上げられると、ペダルアーム211が反時計回りに回転する。これにより、太い一点鎖線の矢印SU2で示すように、第1のリンク軸221の一端(下端)が下方へ引き下げられる。また、太い一点鎖線の矢印SU3で示すように、第2のリンク軸222がシフト軸250を中心として反時計回りに回転する。このとき、第1のリンク軸221には引張荷重が加わる。引張荷重は荷重センサSE5により検出され、図2のECU50に出力される。なお、荷重センサSE5においては、引張荷重の検出値(電圧値)は0または正の値となる。
一方、図4に太い点線の矢印SD1で示すように、運転者の左足FLによりシフトペダル210が押し下げられると、ペダルアーム211が時計回りに回転する。これにより、太い点線の矢印SD2で示すように、第1のリンク軸221の一端(下端)が上方へ押し上げられる。また、太い点線の矢印SD3で示すように、第2のリンク軸222がシフト軸250を中心として時計回りに回転する。このとき、第1のリンク軸221には圧縮荷重が加わる。圧縮荷重は荷重センサSE5により検出され、図2のECU50に出力される。なお、荷重センサSE5においては、圧縮荷重の検出値(電圧値)は0または負の値となる。
[4]シフト操作が行われたか否かの判定方法
図2のECU50には、荷重センサSE5により検出される荷重について予め定められた荷重しきい値が設定されている。また、ECU50には、シフトカムセンサSE4により検出される回転角度について、予め定められた角度しきい値が設定されている。
図2のECU50には、荷重センサSE5により検出される荷重について予め定められた荷重しきい値が設定されている。また、ECU50には、シフトカムセンサSE4により検出される回転角度について、予め定められた角度しきい値が設定されている。
エンジン107の作動時には、図2の荷重センサSE5により検出された荷重が荷重しきい値を超えたという荷重条件が満たされたか否かが判定される。また、図2のシフトカムセンサSE4により検出された回転角度が角度しきい値を超えたという角度条件が満たされたか否かが判定される。その上で、荷重条件および角度条件が満たされた場合に、シフト操作が行われたと判定される。一方、荷重条件および角度条件の少なくとも一方が満たされない場合に、シフト操作が行われていないと判定される。
図5は、シフト操作時における荷重センサSE5およびシフトカムセンサSE4の出力信号の一例を示す図である。図5の上段に荷重センサSE5の出力信号の一例が示される。そのグラフにおいては、縦軸が荷重の検出値(電圧値)を示し、横軸が時間を示す。
上記の荷重センサSE5の検出値は、第1のリンク軸221に加わる荷重の種類(引張荷重および圧縮荷重)に応じて正の値および負の値となる。そのため、本実施の形態では、引張荷重および圧縮荷重にそれぞれ対応する荷重しきい値が設定される。図5の例では、圧縮荷重の検出値について、0よりも低く検出下限値Laよりも高い圧縮荷重しきい値Lbが設定されている。また、引張荷重の検出値について、0よりも高く検出上限値Lcよりも低い引張荷重しきい値Ldが設定されている。
図5の下段にシフトカムセンサSE4の出力信号の一例が示される。そのグラフにおいては、縦軸が回転角度の検出値(電圧値)を示し、横軸が時間を示す。シフトカムセンサSE4の出力信号は、変速機5のギアポジションが低速位置にある場合には高くなり、高速位置にあると低くなる。変速機5の複数のギアポジションにそれぞれ対応するように、複数の基準角度値RVが設定されている。また、ハッチングで示すように、各基準角度値RVを中心とする一定幅で遊び角度範囲が設定されている。遊び角度範囲内の値は、シフトカム7bが回転した場合に、シフトフォークc1〜c3(図2)のいずれもがシフトカム7bの軸方向に移動しない回転角度の範囲に対応する。さらに、本例では、ギアポジションの順で連続する2つの基準角度値RVごとに、当該2つの基準角度値RVの間でかつ遊び角度範囲を除く領域に角度しきい値THが設定されている。なお、図5の例では、複数のギアポジションのうちの一部(2つ)が、nを2以上の6以下の自然数として、n速および(n−1)速で示される。
初期状態の時点t1で変速機5のギアポジションがn速に設定されている。その後、時点t2でn速から(n−1)速へのシフトダウンのためのシフト操作が行われると、第1のリンク軸221に圧縮荷重が加わることにより荷重の検出値が0から下降する。この場合、荷重の検出値が負の値である圧縮荷重しきい値Lbよりも低くなったときに、荷重条件が満たされたと判定される。すなわち、荷重の検出値(絶対値)が圧縮荷重しきい値Lb(絶対値)を超えたときに、荷重条件が満たされたと判定される。一方、回転角度の検出値は、シフト操作が開始された直後はn速の基準角度値RVから遊び角度範囲内で緩やかに上昇する。その後、回転角度の検出値は、遊び角度範囲を外れることにより比較的高い比率で上昇する。この場合、回転角度の検出値が、n速および(n−1)速にそれぞれ対応する2つの基準角度値RVの間に設定された角度しきい値THよりも高くなったときに、角度条件が満たされたと判定される。すなわち、回転角度の検出値が任意のギアポジションに対応する基準角度値RVから当該基準角度値RVに対応する角度しきい値THを超えたときに、角度条件が満たされたと判定される。時点t3で荷重条件および角度条件が満たされることにより、シフトダウンのためのシフト操作が行われたことが判定される。この場合、後述するエンジン107の状態に応じてエンジン107の出力調整が行われる。それにより、変速機5のギアポジションがn速から(n−1)速に円滑に移行する。
シフトダウンのためのシフト操作が終了すると、荷重の検出値が0となる。また、ギアポジションが(n−1)速に移行することにより、回転角度の検出値が(n−1)速に対応する基準角度値RVに維持される。
続いて、時点t4で(n−1)速からn速へのシフトアップのためのシフト操作が行われると、第1のリンク軸221に引張荷重が加わることにより荷重の検出値が0から上昇する。この場合、荷重の検出値が正の値である引張荷重しきい値Ldよりも高くなったときに、荷重条件が満たされたと判定される。すなわち、荷重の検出値(絶対値)が引張荷重しきい値Ld(絶対値)を超えたときに、荷重条件が満たされたと判定される。一方、回転角度の検出値は、シフト操作が開始された直後は(n−1)速の基準角度値RVから遊び角度範囲内で緩やかに下降する。その後、回転角度の検出値は、遊び角度範囲を外れることにより比較的高い比率で下降する。この場合、回転角度の検出値が、n速および(n−1)速にそれぞれ対応する2つの基準角度値RVの間に設定された角度しきい値THよりも低くなったときに、角度条件が満たされたと判定される。すなわち、回転角度の検出値が任意のギアポジションに対応する基準角度値RVから当該基準角度値RVに対応する角度しきい値THを超えたときに、角度条件が満たされたと判定される。時点t5で荷重条件および角度条件が満たされることにより、シフトアップのためのシフト操作が行われたことが判定される。この場合、後述するエンジン107の状態に応じてエンジン107の出力調整が行われる。それにより、変速機5のギアポジションが(n−1)速からn速に円滑に移行する。
シフトアップのためのシフト操作が終了すると、荷重の検出値が0となる。また、ギアポジションがn速に移行することにより、回転角度の検出値がn速に対応する基準角度値RVに維持される。
なお、荷重センサSE5の出力信号はノイズ等の影響により乱れる場合がある。したがって、荷重の検出値(絶対値)が予め定められた時間連続して荷重しきい値(絶対値)を超えた場合に荷重条件が満たされたという判定が行われてもよい。それにより、荷重条件の誤判定が防止される。
また、シフトカムセンサSE4の出力信号はノイズ等の影響により乱れる場合がある。したがって、シフトカムセンサSE4の検出値が予め定められた時間連続して角度しきい値を超えた場合に角度条件が満たされたという判定が行われてもよい。それにより、角度条件の誤判定が防止される。
[5]エンジン107の状態
ここで、エンジン107の作動中の状態について、変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係とともに説明する。変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係は、エンジン107の状態に応じて変化する。図6(a)〜(c)は、変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係を示す図である。図6(a)〜(c)においては、スライドギア91におけるドグ92の形成部分およびフィックスギア93におけるドグ穴94の形成部分の断面図が模式的に示される。本例のスライドギア91およびフィックスギア93は、図3のギア5c1およびギア5c2にそれぞれ対応する。また、スライドギア91およびフィックスギア93の図6(a)〜(c)に示される部分は、太い矢印で示す方向に移動(回転)しているものとする。さらに、図2のクラッチ3は接続状態にあるものとする。
ここで、エンジン107の作動中の状態について、変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係とともに説明する。変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係は、エンジン107の状態に応じて変化する。図6(a)〜(c)は、変速機5におけるフィックスギアのドグ穴とスライドギアのドグとの関係を示す図である。図6(a)〜(c)においては、スライドギア91におけるドグ92の形成部分およびフィックスギア93におけるドグ穴94の形成部分の断面図が模式的に示される。本例のスライドギア91およびフィックスギア93は、図3のギア5c1およびギア5c2にそれぞれ対応する。また、スライドギア91およびフィックスギア93の図6(a)〜(c)に示される部分は、太い矢印で示す方向に移動(回転)しているものとする。さらに、図2のクラッチ3は接続状態にあるものとする。
自動二輪車100が例えば上りの路面上で加速して走行している場合には、クランク軸2(図3)のトルクがドライブ軸5b(図3)に伝達される。具体的には、クランク軸2からメイン軸5aを通してスライドギア91に伝達されるトルクが、ドグ92によりフィックスギア93およびドライブ軸5bにさらに伝達される。この場合、図6(a)に示すように、ドグ92の移動方向における前方側の側面がドグ穴94の移動方向における前方側の側面に当接するとともに、ドグ92とドグ穴94との間に大きな噛み合い力が発生する。このように、クランク軸2から変速機5を通して後輪115にトルクが伝達される状態をエンジン107の駆動状態と呼ぶ。
一方、自動二輪車100が例えば下りの路面上でブレーキを用いることなく減速している場合には、ドライブ軸5bのトルクがクランク軸2に伝達される。具体的には、ドライブ軸5bからフィックスギア93に伝達されるトルクが、ドグ92によりスライドギア91およびメイン軸5aにさらに伝達される。この場合、図6(b)に示すように、ドグ92の移動方向における後方側の側面がドグ穴94の移動方向における後方側の側面に当接するとともに、ドグ92とドグ穴94との間に大きな噛み合い力が発生する。このように、後輪115から変速機5を通してクランク軸2にトルクが伝達される状態をエンジン107の被駆動状態と呼ぶ。エンジン107の被駆動状態は、いわゆるエンジンブレーキが作用しているときのエンジン107の状態である。
エンジン107の状態が駆動状態および被駆動状態のいずれにも該当しない場合には、クランク軸2とドライブ軸5bとの間でトルクがほとんど伝達されない。この場合、ドグ92の回転速度とドグ穴94の回転速度とがほぼ等しくなることにより、ドグ92とドグ穴94との間に大きな噛み合い力が発生しない。それにより、図6(c)に白抜きの矢印で示すように、ドグ92がドグ穴94に対して回転方向およびメイン軸5aの軸方向に移動可能となる。このように、クランク軸2と後輪115との間でトルクが伝達されない状態をエンジン107の境界状態と呼ぶ。エンジン107の出力調整は、駆動状態または被駆動状態にあるエンジン107を境界状態に近づけるために行われる。
[6]エンジン107の状態の判定方法
本実施の形態に係る自動二輪車100においては、エンジン107の出力調整を行うか否かが、シフト操作の種類とエンジン107の状態との組み合わせに応じて決定される。
本実施の形態に係る自動二輪車100においては、エンジン107の出力調整を行うか否かが、シフト操作の種類とエンジン107の状態との組み合わせに応じて決定される。
具体的には、シフトダウンのためのシフト操作が行われた場合、シフトダウンのためのエンジン107の出力調整は、エンジン107が被駆動状態にあるときに行われ、エンジン107が駆動状態および境界状態にあるときに行われない。エンジン107が駆動状態にあるときに出力調整が行われないことにより、シフトダウン直後における駆動状態から被駆動状態への急激な切り替わりの発生が低減されるので、変速機5に過剰な負荷が加わることが低減される。したがって、変速機5の長寿命化が実現される。また、シフト操作が行われた時点でエンジン107が境界状態にあるときには、運転者がクラッチレスシフトの意図を持ってアクセル開度を調整している可能性が高い。したがって、エンジン107が境界状態にあるときに出力調整が行われないことにより、運転者の技能によるギア比の切り替えが可能となる。
また、シフトアップのためのシフト操作が行われた場合、シフトアップのためのエンジン107の出力調整は、エンジン107が駆動状態にあるときに行われ、エンジン107が被駆動状態および境界状態にあるときに行われない。エンジン107が被駆動状態にあるときに出力調整が行われないことにより、エンジン107が被駆動状態にあるときに、自動二輪車100の速度が急激に上昇することが防止される。また、エンジン107が境界状態にあるときに出力調整が行われないことにより、運転者の技能によるギア比の切り替えが可能となる。
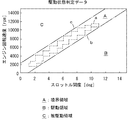
そこで、図2のECU50では、上記のようにシフト操作が行われたか否かの判定とともに、エンジン107が駆動状態、境界状態および被駆動状態のいずれの状態にあるかが判定される。具体的には、無負荷時のエンジン107の回転速度と後述するETV82(図8)のスロットル開度との関係を示すデータ(以下、駆動状態判定データと呼ぶ。)に基づいて、エンジン107が駆動状態、境界状態および被駆動状態のうちどの状態であるかが判定される。
図7は、ECU50に記憶される駆動状態判定データの一例を示す図である。図7において、縦軸はエンジン107の回転速度を示し、横軸はETV82のスロットル開度を示す。
図7において、点線aは、ギア5c,5d(図2)が係合しないことにより変速機5がトルクを伝達しない状態にある場合のエンジン107の回転速度とスロットル開度との関係を示している。図7に示すように、変速機5がトルクを伝達しない状態にある場合、エンジン107の回転速度とスロットル開度との関係はヒステリシスループを形成する。なお、点線aに示す関係は、例えば、実験またはコンピュータを用いたシミュレーション等により導出することができる。
本実施の形態においては、点線aに外接する2本の平行な直線の内側の帯状の領域(一点鎖線bと一点鎖線cとの間の領域)を境界領域Aと定義するとともに、一点鎖線bより下の領域を駆動領域Bと定義し、一点鎖線cより上の領域を被駆動領域Cと定義する。
エンジン107の状態の判定時には、クランクセンサSE2の検出値に基づいてエンジン107の回転速度が算出される。算出された回転速度とスロットルセンサSE3の検出値とに基づいて、エンジン107とスロットル開度との関係が上記3つの領域のうちのどの領域に含まれているかが判定される。それにより、エンジン107が駆動状態、境界状態および被駆動状態のうちのどの状態であるかが判定される。
例えば、エンジン107の回転速度が6000rpmでスロットル開度が12degである状態は駆動領域Bに含まれる。この場合、エンジン107は駆動状態であると判定される。また、エンジン107の回転速度が6000rpmでスロットル開度が2degである状態は被駆動領域Cに含まれる。この場合、エンジン107は被駆動状態であると判定される。また、エンジン107の回転速度が6000rpmでスロットル開度が6degである状態は境界領域Aに含まれる。この場合、エンジン107は境界状態であると判定される。
[7]エンジン107およびその周辺部材と自動二輪車100の制御系
図8は、エンジン107およびその周辺部材と自動二輪車100の制御系の概略構成を示す図である。図8に示すように、エンジン107はシリンダ71を有し、シリンダ71内には、ピストン72が往復動可能に設けられる。また、シリンダ71内の上部には燃焼室73が形成される。燃焼室73は吸気ポート74および排気ポート75を介してエンジン107の外部に連通する。
図8は、エンジン107およびその周辺部材と自動二輪車100の制御系の概略構成を示す図である。図8に示すように、エンジン107はシリンダ71を有し、シリンダ71内には、ピストン72が往復動可能に設けられる。また、シリンダ71内の上部には燃焼室73が形成される。燃焼室73は吸気ポート74および排気ポート75を介してエンジン107の外部に連通する。
吸気ポート74の下流側の開口端74aに吸気弁76が開閉自在に設けられ、排気ポート75の上流側の開口端75aに排気弁77が開閉自在に設けられる。吸気弁76および排気弁77は、通常のカム機構により駆動される。燃焼室73の上部には、点火プラグ78が設けられる。
エンジン107には、吸気ポート74と連通するように吸気管79が取り付けられ、排気ポート75と連通するように排気管118が取り付けられる。吸気管79には、シリンダ71内に燃料を供給するためのインジェクタ108が設けられる。また、吸気管79内には、ETV82が設けられる。
エンジン107の作動時には、空気が吸気管79を通して吸気ポート74から燃焼室73内に吸入されるとともに、インジェクタ108により燃焼室73内に燃料が供給される。それにより、燃焼室73内で混合気が生成され、点火プラグ78により混合気に火花点火が行われる。燃焼室73内において混合気の燃焼により生じた既燃ガスは、排気ポート75から排気管118を通して排出される。
ECU50においては、上記のようにCPUがROMに記憶された制御プログラムを実行する。それにより、記憶部51、荷重判定部52、角度判定部53、シフト判定部54、状態判定部55および出力制御部56の機能が実現される。なお、ECU50において実現される各機能部の構成の一部または全てが電子回路等のハードウェアにより実現されてもよい。
記憶部51は、例えばROMおよびRAMの記憶領域の一部で構成され、検出下限値La、圧縮荷重しきい値Lb、検出上限値Lcおよび引張荷重しきい値Ldを記憶する。また、記憶部51は、複数の基準角度値RV、複数の遊び角度範囲および複数の角度しきい値THを記憶する。さらに、記憶部51は、予め定められた駆動状態判定データを記憶する。
また、記憶部51は、シフトペダル210の操作方向(以下、ペダル操作方向と呼ぶ。)とシフトカム7bの回転方向(以下、カム回転方向と呼ぶ。)とギアポジションの切り替え方向との間の予め定められた対応関係(以下、操作対応関係と呼ぶ。)を記憶する。本例の操作対応関係においては、シフトペダル210を押し上げる方向とシフトカム7bの第1の回転方向とシフトアップとが対応付けられ、シフトペダル210を押し下げる方向とシフトカム7bの第2の回転方向とシフトダウンとが対応付けられている。
荷重判定部52は、荷重センサSE5からの出力信号に基づいて荷重の検出値が荷重しきい値(圧縮荷重しきい値Lbまたは引張荷重しきい値Ld)を超えたという荷重条件が満たされたか否かを判定する。また、荷重判定部52は、荷重の検出値が正の値であるか負の値であるかに基づいてペダル操作方向を判定する。
角度判定部53は、シフトカムセンサSE4からの出力信号に基づいて検出された回転角度が角度しきい値(複数の角度しきい値THのいずれか)を超えたという角度条件が満たされたか否かを判定する。また、角度判定部53は、検出された回転角度の変化に基づいてカム回転方向を判定する。
シフト判定部54は、荷重条件および角度条件が満たされる場合に上記の操作対応関係に基づいてペダル操作方向とカム回転方向とが対応するか否かを判定する。そこで、シフト判定部54は、ペダル操作方向およびカム回転方向が対応する場合にシフト操作が行われたと判定し、当該シフト操作がシフトアップおよびシフトダウンのいずれに対応するかを判定する。一方、シフト判定部54は、ペダル操作方向およびカム回転方向が対応しない場合にシフト操作が行われていないと判定する。
例えば、シフト判定部54は、操作方向がシフトペダル210を押し下げる方向であり、回転方向が第2の回転方向である場合に、シフトダウンのためのシフト操作が行われていると判定する。一方、シフト判定部54は、操作方向がシフトペダル210を押し下げる方向であり、シフト回転方向が第1の回転方向である場合に、シフト操作が行われていないと判定する。
また、シフト判定部54は、操作方向がシフトペダル210を押し上げる方向であり、回転方向が第1の回転方向である場合に、シフトアップのためのシフト操作が行われていると判定する。一方、シフト判定部54は、操作方向がシフトペダル210を押し上げる方向であり、シフト回転方向が第2の回転方向である場合に、シフト操作が行われていないと判定する。
状態判定部55は、クランクセンサSE2からの出力信号およびスロットルセンサSE3の出力信号と駆動状態判定データとに基づいて、エンジン107の状態を判定する。出力制御部56は、シフト操作が行われていない場合に、アクセルセンサSE1からの出力信号に基づいて、ETV82のスロットル開度を調整する。一方、出力制御部56は、クラッチレバー105aが操作されることなくシフト操作が行われた場合に、エンジン107の状態に応じてエンジン107の出力調整を行う。
[8]ECU50における制御動作
図9は、ECU50における制御動作の一例を示すフローチャートである。以下に説明する制御動作は、停止状態にあるエンジン107が作動することにより開始され、作動状態にあるエンジン107が停止することにより終了する。
図9は、ECU50における制御動作の一例を示すフローチャートである。以下に説明する制御動作は、停止状態にあるエンジン107が作動することにより開始され、作動状態にあるエンジン107が停止することにより終了する。
制御動作が開始されると、出力制御部56は、通常時の制御処理として、アクセルセンサSE1により検出されたアクセル開度に応じてETV82のスロットル開度を調整する(ステップS501)。それにより、エンジン107の出力がアクセル開度に応じた値に調整される。
次に、荷重判定部52は、荷重条件が満たされたか否かを判定する(ステップS502)。荷重条件が満たされない場合、出力制御部56はステップS501の処理に戻る。荷重条件が満たされた場合、荷重判定部52は、ペダル操作方向を判定する(ステップS503)。
その後、角度判定部53は、角度条件が満たされたか否かを判定する(ステップS504)。角度条件が満たされない場合、出力制御部56はステップS501の処理に戻る。角度条件が満たされた場合、角度判定部53は、カム回転方向を判定する(ステップS505)。
その後、シフト判定部54は、ペダル操作方向とカム回転方向とが対応するか否かを判定する(ステップS506)。ペダル操作方向とカム回転方向とが互いに対応しない場合、出力制御部56はステップS501の処理に戻る。
ペダル操作方向とカム回転方向とが互いに対応する場合、シフト判定部54は、シフト操作が行われたと判定するとともに、当該シフト操作がシフトアップに対応するか否かを判定する(ステップS507)。
シフト操作がシフトアップに対応する場合、状態判定部55は、エンジン107が駆動状態にあるか否かを判定する(ステップS508)。エンジン107が駆動状態にある場合、出力制御部56は、シフトアップのためのエンジン107の出力調整を開始する(ステップS509)。シフトアップのためのエンジン107の出力調整では、例えば点火プラグ78による混合気の点火が停止される。それにより、エンジン107の出力が低下され、クランク軸2に発生するトルクが0に近づくように調整される。
なお、ステップS509の出力調整では、混合気の点火を停止させる代わりに、ETV82のスロットル開度を減少させるかまたはインジェクタ108の燃料噴射量を減少させることにより、エンジン107の出力を低下させてもよい。あるいは、混合気の点火時期をずらすことによりエンジン107の出力を低下させてもよい。
ステップS508でエンジン107が駆動状態にない場合、出力制御部56はステップS501の処理に戻る。この場合、エンジン107の出力調整が行われない。
ステップS509の処理後、シフト判定部54は、シフトカムセンサSE4の出力信号に基づいて変速機5におけるシフトアップが完了したか否かを判定する(ステップS510)。シフト判定部54は、シフトアップが完了するまでステップS510の処理を繰り返す。その後、シフトアップが完了すると、出力制御部56は、エンジン107の出力調整を終了し(ステップS511)、ステップS501の処理に戻る。
ステップS507において、シフト操作がシフトダウンに対応する場合、状態判定部55は、エンジン107が被駆動状態にあるか否かを判定する(ステップS512)。エンジン107が被駆動状態にある場合、出力制御部56は、シフトダウンのためのエンジン107の出力調整を開始する(ステップS513)。シフトダウンのためのエンジン107の出力調整では、例えばETV82のスロットル開度が増加される。それにより、エンジン107の出力が増加され、クランク軸2に発生するトルクが0に近づくように調整される。
なお、ステップS513の出力調整では、ETV82のスロットル開度を増加させる代わりに、インジェクタ108の燃料噴射量を増加させることにより、エンジン107の出力を増加させてもよい。あるいは、混合気の点火時期をずらすことによりエンジン107の出力を増加させてもよい。
ステップS512でエンジン107が被駆動状態にない場合、出力制御部56はステップS501の処理に戻る。この場合、エンジン107の出力調整が行われない。
ステップS513の処理後、シフト判定部54は、シフトカムセンサSE4の出力信号に基づいて変速機5におけるシフトダウンが完了したか否かを判定する(ステップS514)。シフト判定部54は、シフトダウンが完了するまでステップS514の処理を繰り返す。その後、シフトダウンが完了すると、出力制御部56は、ステップS511の処理に進み、エンジン107の出力調整を終了し、ステップS501の処理に戻る。
[9]実施の形態の効果
(a)上記の自動二輪車100においては、運転者によりシフトペダル210が操作された場合に、荷重条件および角度条件が満たされたか否かが判定される。荷重条件および角度条件が満たされたと判定された場合には、シフト操作が行われたと判定される。一方、荷重条件および角度条件の少なくとも一方が満たされていないと判定された場合には、シフト操作が行われていないと判定される。
(a)上記の自動二輪車100においては、運転者によりシフトペダル210が操作された場合に、荷重条件および角度条件が満たされたか否かが判定される。荷重条件および角度条件が満たされたと判定された場合には、シフト操作が行われたと判定される。一方、荷重条件および角度条件の少なくとも一方が満たされていないと判定された場合には、シフト操作が行われていないと判定される。
それにより、シフト操作が行われていないときに荷重条件が満たされたと誤判定される場合でも、角度条件が満たされないときにはシフト操作が行われていないと判定される。したがって、シフト操作の有無を正確に判定するために、優れた耐ノイズ性および耐久性を有しかつ高い精度で荷重を検出することが可能な高価な荷重検出器を用意する必要がない。
また、シフト操作が行われていないときに角度条件が満たされたと誤判定される場合でも、荷重条件が満たされないときにはシフト操作が行われていないと判定される。したがって、シフト操作の有無を正確に判定するために、優れた耐ノイズ性および耐久性を有しかつ高い精度で角度情報を取得することが可能な高価な角度検出器を用意する必要がない。
これらの結果、コストの増大を抑制しつつ運転者の意図によるシフト操作が行われたか否かを正確に判定することにより変速機5のギア比を切り替えるためのエンジン107の出力調整を適切に行うことが可能となる。
(b)変速機5においては、シフトカム7bの角度しきい値THは複数の遊び角度範囲を除く領域に設定されている。それにより、角度条件が満たされたか否かが正確に判定される。したがって、運転者の意図によりシフト操作が行われたか否かが適切に判定される。
(c)上記の自動二輪車100においては、運転者は、シフトペダル210を押し上げることにより変速機5のシフトアップを行うことができる。また、運転者は、シフトペダル210を押し下げることにより変速機5のシフトダウンを行うことができる。したがって、運転者は、例えば自動二輪車100の減速時にシフトペダル210を踏み込むことにより容易にシフトダウンを行うことができる。
(d)上記のように、圧縮荷重しきい値Lbの絶対値は、検出下限値Laの絶対値よりも低くなるように設定されている。また、引張荷重しきい値Ldの絶対値は、検出上限値Lcよりも低くなるように設定されている。
これらの場合、圧縮荷重しきい値Lbが検出下限値Laに設定される場合および引張荷重しきい値Ldが検出上限値Lcに設定される場合に比べて、荷重センサSE5の検出値に基づく荷重しきい値を超えたか否かの判定精度が高くなる。
(e)荷重しきい値(圧縮荷重しきい値Lbおよび引張荷重しきい値Ld)の絶対値がシフトカム7bを実際に回転させるために必要とされる荷重の絶対値よりも低く設定されている場合には、運転者の意図によらないシフトペダル210の操作により、荷重条件が満たされたと判定される可能性がある。このような場合でも、上記の構成によれば、シフトカム7bが回転しない限り角度条件が満たされたと判定されることはない。したがって、運転者の意図によらないシフトペダル210の操作によりエンジン107の出力調整が行われることが防止される。
[10]他の実施の形態
(a)上記実施の形態では、荷重センサSE5は、第1のリンク軸221に加えられる圧縮荷重および引張荷重を検出可能に構成されるが、本発明はこれに限定されない。荷重センサSE5は、圧縮荷重および引張荷重のうち一方のみを検出可能に構成されてもよい。この場合、荷重センサSE5により検出される荷重について1つの荷重しきい値のみが設定され、シフトアップおよびシフトダウンのうち一方のためのシフト操作のみが判定対象となる。したがって、図8のシフト判定部54は、図9のステップS506,S507の判定処理を行う必要がなくなる。
(a)上記実施の形態では、荷重センサSE5は、第1のリンク軸221に加えられる圧縮荷重および引張荷重を検出可能に構成されるが、本発明はこれに限定されない。荷重センサSE5は、圧縮荷重および引張荷重のうち一方のみを検出可能に構成されてもよい。この場合、荷重センサSE5により検出される荷重について1つの荷重しきい値のみが設定され、シフトアップおよびシフトダウンのうち一方のためのシフト操作のみが判定対象となる。したがって、図8のシフト判定部54は、図9のステップS506,S507の判定処理を行う必要がなくなる。
(b)上記実施の形態では、シフトカム7bの角度しきい値THが複数の遊び角度範囲を除く範囲に設定されているが、角度しきい値THは複数の遊び角度範囲のうちいずれかの遊び角度範囲内に設定されてもよい。この場合、シフト操作が開始された後、角度条件が満たされたことが判定されるまでの時間を短縮することができる。したがって、エンジン107の出力調整を迅速に開始することができる。
(c)上記実施の形態では、シフトカム7bの回転角度に関して、ギアポジションの順で連続する2つの基準角度値RVごとに1つの角度しきい値THが設定されているが、本発明はこれに限定されない。ギアポジションの順で連続する2つの基準角度値RVの間に、シフトアップおよびシフトダウンにそれぞれ対応する2つの角度しきい値THが設定されてもよい。この場合、シフト操作が行われたか否かをより適切に判定することが可能になる。
(d)上記実施の形態では、シフトペダル210が押し上げられることによりシフトアップが行われ、シフトペダル210が押し下げられることによりシフトダウンが行われるが、本発明はこれに限定されない。
シフト機構7は、シフトペダル210が押し下げられることによりシフトアップが行われ、シフトペダル210が押し上げられることによりシフトダウンが行われるように構成されてもよい。この場合、運転者は、例えば自動二輪車100の旋回時にシフトペダル210を踏み込むことにより容易にシフトアップを行うことができる。
(e)上記実施の形態では、シフトカム7bの回転角度について、角度条件の判定のために複数のギアポジションに対応する複数の基準角度値RVが予め設定されているが、本発明はこれに限定されない。複数の基準角度値RVの各々は、変速機5のギア比が切り替えられるごとにシフトカムセンサSE4の検出値に基づいて更新されてもよい。
例えば、(n−1)速からn速へのシフトアップ時には、当該シフトアップのためのシフトペダル210の操作後、荷重の検出値が0に戻った時点で取得される回転角度の検出値によりn速の基準角度値RVを更新してもよい。また、n速から(n−1)速へのシフトダウン時には、当該シフトダウンのためのシフトペダル210の操作後、荷重の検出値が0に戻った時点で取得される回転角度の検出値により(n−1)速の基準角度値RVを更新してもよい。このように、基準角度値RVの更新を行う場合、更新が行われるごとに、更新された基準角度値RVに基づいて角度しきい値THを再設定してもよい。それにより、角度条件の判定をより正確に行うことができる。
(f)上記実施の形態では、エンジン107が駆動状態にある場合にはシフトダウンのためのエンジン107の出力調整が行われないが、本発明はこれに限定されない。
エンジン107が駆動状態にある場合であっても、シフトダウンのためのシフト操作に基づいてエンジン107の出力調整が行われてもよい。この場合、エンジン107が境界状態にある場合にのみエンジン107の出力調整が行われなくてもよい。
また、上記実施の形態では、エンジン107が被駆動状態にある場合にはシフトアップのためのエンジン107の出力調整が行われないが、本発明はこれに限定されない。エンジン107が被駆動状態にある場合であっても、シフトアップのためのシフト操作に基づいてエンジン107の出力調整が行われてもよい。この場合、エンジン107が境界状態にある場合にのみエンジン107の出力調整が行われなくてもよい。
なお、エンジン107の状態によらず、シフトダウンおよびシフトアップのためのエンジン107の出力調整が可能となる場合には、図8の状態判定部55はなくてもよい。
(g)上記実施の形態では、荷重センサSE5が第1のリンク軸221に設けられるが、本発明はこれに限定されない。荷重センサSE5は、運転者がシフトペダル210に加える荷重を直接的または間接的に検出することができればよい。したがって、荷重センサSE5は、第1のリンク軸221に代えて、第2のリンク軸222に設けられてもよいし、シフトペダル210に設けられてもよい。
(h)上記実施の形態は、本発明を上記実施の形態は、本発明を自動二輪車に適用した例であるが、これに限らず、自動四輪車、自動三輪車もしくはATV(All Terrain Vehicle;不整地走行車両)等の他の鞍乗型車両に本発明を適用してもよい。
[11]参考形態
参考形態に係る自動二輪車は、以下の点を除いて上記実施の形態に係る自動二輪車100と同じ構成を有する。
参考形態に係る自動二輪車は、以下の点を除いて上記実施の形態に係る自動二輪車100と同じ構成を有する。
参考形態に係る自動二輪車においては、シフトダウンのためのシフト操作が行われかつエンジン107が被駆動状態にある場合に、ECU50の出力制御部56が、エンジン107の出力を調整する代わりに、クラッチ3を一時的に切断する。また、シフトアップのためのシフト操作が行われかつエンジン107が駆動状態にある場合に、ECU50の出力制御部56が、エンジン107の出力を調整する代わりに、クラッチ3を一時的に切断する。これらの場合、クラッチ3が自動的に切断されることにより変速機5のギア比の切り替えが円滑に行われる。
[12]実施の形態の各部と請求項の各構成要素との対応
以下、請求項の各構成要素と実施の形態の各構成要素との対応の例について説明するが、本発明は下記の例に限定されない。
以下、請求項の各構成要素と実施の形態の各構成要素との対応の例について説明するが、本発明は下記の例に限定されない。
上記の実施の形態においては、自動二輪車100が鞍乗型車両の例であり、エンジン107がエンジンの例であり、後輪115が駆動輪の例であり、シフトカム7bがシフトカムの例であり、変速機5が変速機の例であり、シフトペダル210がシフトペダルの例であり、第1のリンク機構220が駆動部の例であり、シフト軸250および第2のリンク機構260が回転駆動部材の例である。
また、荷重センサSE5が荷重検出部の例であり、シフトカムセンサSE4が角度検出部の例であり、圧縮荷重しきい値Lbおよび引張荷重しきい値Ldが荷重しきい値の例であり、荷重判定部52が荷重判定部の例であり、角度しきい値THが角度しきい値の例であり、角度判定部53が角度判定部の例であり、シフト判定部54がシフト判定部の例であり、出力制御部56が制御部の例である。
また、シフトフォークc1〜c3が1または複数のシフトフォークの例であり、状態判定部55が第1および第2の状態判定部の例であり、検出下限値Laおよび検出上限値Lcが検出限界値の例である。
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の構成要素を用いることもできる。
2…クランク軸,3…クラッチ,5…変速機,5a…メイン軸,5b…ドライブ軸…5c,5c1,5c2,5d,5d1,5d2…ギア,5e…後輪ドライブスプロケット,5f,92…ドグ,7…シフト機構,7b…シフトカム,50…ECU,51…記憶部,52…荷重判定部,53…角度判定部,54…シフト判定部,55…状態判定部,56…出力制御部,71…シリンダ,72…ピストン,73…燃焼室,74…吸気ポート,74a,75a…開口端,75…排気ポート,76…吸気弁,77…排気弁,78…点火プラグ,79…吸気管,82…ETV,91…スライドギア,93…フィックスギア,94…ドグ穴,100…自動二輪車,101…本体フレーム,102…ヘッドパイプ,103…フロントフォーク,104…前輪,105…ハンドル,105a…クラッチレバー,107…エンジン,108…インジェクタ,109…クランクケース,110…ミッションケース,112…燃料タンク,113…シート,114…リアアーム,115…後輪,116…後輪ドリブンスプロケット,117…チェーン,118…排気管,120…バックステップ,210…シフトペダル,211…ペダルアーム,212…取付部,220…第1のリンク機構,221…第1のリンク軸,222…第2のリンク軸,250…シフト軸,260…第2のリンク機構,300…ストッパープレート,A…境界領域,B…駆動領域,C…被駆動領域,FL…左足,La…検出下限値,Lb…圧縮荷重しきい値,Lc…検出上限値,Ld…引張荷重しきい値,RV…基準角度値,SE1…アクセルセンサ,SE2…クランクセンサ,SE3…スロットルセンサ,SE4…シフトカムセンサ,SE5…荷重センサ,TH…角度しきい値,c1〜c3…シフトフォーク,d1〜d3…カム溝,e1〜e3…摺動ピン
Claims (8)
- エンジンと、
駆動輪と、
シフトカムを有するとともに前記エンジンにより発生されるトルクを前記駆動輪に伝達する変速機と、
前記変速機のギア比を切り替えるために運転者により操作可能なシフトペダルと、
前記シフトペダルが押し上げられるまたは押し下げられることにより動作する駆動部と、
前記駆動部の動作に連動して前記シフトカムを回転させる回転駆動部材と、
前記駆動部に設けられ、前記シフトペダルが押し上げられるまたは押し下げられることにより前記駆動部に加えられた荷重を検出する荷重検出器と、
前記シフトカムの回転角度を検出する角度検出部と、
前記荷重検出器により検出された荷重が荷重しきい値を超えたという荷重条件が満たされたか否かを判定する荷重判定部と、
前記角度検出部により検出された回転角度が予め定められた角度しきい値を超えたという角度条件が満たされたか否かを判定する角度判定部と、
前記荷重条件および前記角度条件が満たされた場合に前記変速機のギア比を切り替えるためのシフト操作が行われたと判定し、前記荷重条件および前記角度条件の少なくとも一方が満たされていないと判定された場合に前記シフト操作が行われていないと判定するシフト判定部と、
前記シフト判定部により前記シフト操作が行われたと判定された場合に、前記変速機のギア比を切り替えるために前記エンジンの出力を調整する制御部とを備える、鞍乗型車両。 - 前記荷重判定部は、前記加えられた荷重が予め定められた時間連続して前記荷重しきい値を超えたことを前記荷重検出器の出力信号が示す場合に前記荷重条件が満たされたと判定する、請求項1記載の鞍乗型車両。
- 前記変速機は、前記シフトカムが回転することにより前記シフトカムの回転角度に応じて前記シフトカムの軸方向に移動する1または複数のシフトフォークをさらに有し、
前記変速機のギア比は、前記1または複数のシフトフォークの少なくとも1つが前記軸方向に移動することにより切り替えられ、
前記シフトカムは、当該シフトカムが回転した場合に前記1または複数のシフトフォークが前記軸方向に移動しない遊び角度を有するように構成され、
前記角度しきい値は、前記遊び角度を除く角度に設定される、請求項1または2記載の鞍乗型車両。 - 前記シフトペダルは、前記変速機のシフトアップのために運転者により押し上げられるように構成されるとともに、前記変速機のシフトダウンのために運転者により押し下げられるように構成され、
前記駆動部および前記回転駆動部材は、シフトアップのための前記シフトペダルの操作により前記シフトカムを第1の回転方向に回転させ、シフトダウンのための前記シフトペダルの操作により前記シフトカムを前記第1の回転方向とは逆の第2の回転方向に回転させる、請求項1〜3のいずれか一項に記載の鞍乗型車両。 - 前記シフトペダルは、前記変速機のシフトダウンのために運転者により押し上げられるように構成されるとともに、前記変速機のシフトアップのために運転者により押し下げられるように構成され、
前記駆動部および前記回転駆動部材は、シフトアップのための前記シフトペダルの操作により前記シフトカムを第1の回転方向に回転させ、シフトダウンのための前記シフトペダルの操作により前記シフトカムを前記第1の回転方向とは逆の第2の回転方向に回転させる、請求項1〜3のいずれか一項に記載の鞍乗型車両。 - 前記エンジンが前記エンジンから前記駆動輪にトルクが伝達される駆動状態にあるか否かを判定する第1の状態判定部をさらに備え、
前記角度判定部は、前記シフトカムの前記第1の回転方向への回転を判定可能に構成され、
前記制御部は、前記エンジンが前記駆動状態にないことが判定されかつ前記シフトカムの前記第1の回転方向への回転が判定される場合に、前記変速機のギア比を切り替えるための前記エンジンの出力調整を行わない、請求項4または5記載の鞍乗型車両。 - 前記エンジンが前記駆動輪から前記エンジンにトルクが伝達される被駆動状態にあるか否かを判定する第2の状態判定部をさらに備え、
前記角度判定部は、前記シフトカムの前記第2の回転方向への回転を判定可能に構成され、
前記制御部は、前記エンジンが前記被駆動状態にないことが判定されかつ前記シフトカムの前記第2の回転方向への回転が判定される場合に、前記変速機のギア比を切り替えるための前記エンジンの出力調整を行わない、請求項4〜6のいずれか一項に記載の鞍乗型車両。 - 前記荷重しきい値の絶対値は、前記荷重検出器の検出限界値の絶対値よりも低い値に設定される、請求項1〜7のいずれか一項に記載の鞍乗型車両。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017235054A JP2019100307A (ja) | 2017-12-07 | 2017-12-07 | 鞍乗型車両 |
| ES18190498T ES2782098T3 (es) | 2017-12-07 | 2018-08-23 | Vehículo de motocicleta |
| EP18190498.8A EP3495255B1 (en) | 2017-12-07 | 2018-08-23 | Straddled vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017235054A JP2019100307A (ja) | 2017-12-07 | 2017-12-07 | 鞍乗型車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019100307A true JP2019100307A (ja) | 2019-06-24 |
Family
ID=63371584
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017235054A Pending JP2019100307A (ja) | 2017-12-07 | 2017-12-07 | 鞍乗型車両 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3495255B1 (ja) |
| JP (1) | JP2019100307A (ja) |
| ES (1) | ES2782098T3 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4392794B2 (ja) * | 2004-09-08 | 2010-01-06 | 本田技研工業株式会社 | 自動二輪車の変速制御装置 |
| JP5041974B2 (ja) | 2006-11-16 | 2012-10-03 | ヤマハ発動機株式会社 | 制御システムおよび車両 |
| EP2080884A3 (en) * | 2008-01-16 | 2013-11-20 | Yamaha Hatsudoki Kabushiki Kaisha | Control system and saddle-straddling type vehicle including the same |
| JP2009221964A (ja) * | 2008-03-17 | 2009-10-01 | Yamaha Motor Co Ltd | 制御システムおよびそれを備えた鞍乗り型車両 |
| JP5238464B2 (ja) * | 2008-11-21 | 2013-07-17 | ヤマハ発動機株式会社 | 制御システムおよびそれを備えた鞍乗り型車両 |
-
2017
- 2017-12-07 JP JP2017235054A patent/JP2019100307A/ja active Pending
-
2018
- 2018-08-23 ES ES18190498T patent/ES2782098T3/es active Active
- 2018-08-23 EP EP18190498.8A patent/EP3495255B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3495255A1 (en) | 2019-06-12 |
| ES2782098T3 (es) | 2020-09-10 |
| EP3495255B1 (en) | 2020-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5041974B2 (ja) | 制御システムおよび車両 | |
| US8437929B2 (en) | Transmission control system and vehicle | |
| JP5238464B2 (ja) | 制御システムおよびそれを備えた鞍乗り型車両 | |
| EP1923290B1 (en) | Control system and vehicle including the same | |
| US20080149409A1 (en) | Engine output adjustment system and vehicle including the same | |
| JP5831564B2 (ja) | 手動変速機付車両の制御装置 | |
| JP2007285511A (ja) | 変速制御装置および鞍乗型車両 | |
| JP5121654B2 (ja) | 変速制御システムおよび車両 | |
| JP2008106730A (ja) | 鞍乗型車両 | |
| JP5892146B2 (ja) | 車両の制御装置 | |
| JP5124398B2 (ja) | トルク推定システムおよび車両 | |
| JP5107184B2 (ja) | 制御システムおよび車両 | |
| JP2019100307A (ja) | 鞍乗型車両 | |
| JP5263449B2 (ja) | 手動変速機のシフト判定装置 | |
| JP2019100308A (ja) | 鞍乗型車両 | |
| EP2695782B1 (en) | Automatic transmission apparatus and straddle-type vehicle equipped with the apparatus | |
| JP2019100511A (ja) | 鞍乗型車両 | |
| JP5150538B2 (ja) | 制御システムおよびそれを備えた鞍乗り型車両 | |
| JP2009221964A (ja) | 制御システムおよびそれを備えた鞍乗り型車両 |