JP2019057628A - 基板処理装置および基板処理方法 - Google Patents
基板処理装置および基板処理方法 Download PDFInfo
- Publication number
- JP2019057628A JP2019057628A JP2017181365A JP2017181365A JP2019057628A JP 2019057628 A JP2019057628 A JP 2019057628A JP 2017181365 A JP2017181365 A JP 2017181365A JP 2017181365 A JP2017181365 A JP 2017181365A JP 2019057628 A JP2019057628 A JP 2019057628A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- peripheral
- liquid film
- organic solvent
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 title claims abstract description 528
- 238000012545 processing Methods 0.000 title claims description 88
- 238000003672 processing method Methods 0.000 title claims description 6
- 230000002093 peripheral effect Effects 0.000 claims abstract description 234
- 239000007788 liquid Substances 0.000 claims abstract description 168
- 238000010438 heat treatment Methods 0.000 claims description 67
- 238000000926 separation method Methods 0.000 claims description 9
- 230000007717 exclusion Effects 0.000 claims description 7
- 239000013013 elastic material Substances 0.000 claims description 6
- 230000001629 suppression Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 abstract description 32
- 230000008569 process Effects 0.000 abstract description 28
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 abstract description 8
- 229910001873 dinitrogen Inorganic materials 0.000 abstract description 8
- 239000003960 organic solvent Substances 0.000 description 153
- 239000011261 inert gas Substances 0.000 description 69
- 239000007789 gas Substances 0.000 description 59
- 239000002585 base Substances 0.000 description 46
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 37
- 239000008367 deionised water Substances 0.000 description 28
- 229910021641 deionized water Inorganic materials 0.000 description 28
- KFZMGEQAYNKOFK-UHFFFAOYSA-N Isopropanol Chemical compound CC(C)O KFZMGEQAYNKOFK-UHFFFAOYSA-N 0.000 description 27
- 239000000126 substance Substances 0.000 description 25
- 238000005553 drilling Methods 0.000 description 20
- 238000012546 transfer Methods 0.000 description 18
- 239000000243 solution Substances 0.000 description 17
- 238000001035 drying Methods 0.000 description 14
- 230000003028 elevating effect Effects 0.000 description 13
- 230000001965 increasing effect Effects 0.000 description 12
- 230000007246 mechanism Effects 0.000 description 12
- 239000012530 fluid Substances 0.000 description 10
- 239000012808 vapor phase Substances 0.000 description 8
- KRHYYFGTRYWZRS-UHFFFAOYSA-N Fluorane Chemical compound F KRHYYFGTRYWZRS-UHFFFAOYSA-N 0.000 description 6
- 239000012071 phase Substances 0.000 description 6
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000004080 punching Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000001704 evaporation Methods 0.000 description 4
- 230000008020 evaporation Effects 0.000 description 4
- 235000012431 wafers Nutrition 0.000 description 4
- OKKJLVBELUTLKV-UHFFFAOYSA-N Methanol Chemical compound OC OKKJLVBELUTLKV-UHFFFAOYSA-N 0.000 description 3
- 238000007664 blowing Methods 0.000 description 3
- 238000009835 boiling Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- 239000011259 mixed solution Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- CSCPPACGZOOCGX-UHFFFAOYSA-N Acetone Chemical compound CC(C)=O CSCPPACGZOOCGX-UHFFFAOYSA-N 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 2
- 239000002253 acid Substances 0.000 description 2
- 239000003513 alkali Substances 0.000 description 2
- 238000012993 chemical processing Methods 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000003595 mist Substances 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 238000005507 spraying Methods 0.000 description 2
- DDFHBQSCUXNBSA-UHFFFAOYSA-N 5-(5-carboxythiophen-2-yl)thiophene-2-carboxylic acid Chemical compound S1C(C(=O)O)=CC=C1C1=CC=C(C(O)=O)S1 DDFHBQSCUXNBSA-UHFFFAOYSA-N 0.000 description 1
- VEXZGXHMUGYJMC-UHFFFAOYSA-N Hydrochloric acid Chemical compound Cl VEXZGXHMUGYJMC-UHFFFAOYSA-N 0.000 description 1
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- CBENFWSGALASAD-UHFFFAOYSA-N Ozone Chemical compound [O-][O+]=O CBENFWSGALASAD-UHFFFAOYSA-N 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- SWXQKHHHCFXQJF-UHFFFAOYSA-N azane;hydrogen peroxide Chemical compound [NH4+].[O-]O SWXQKHHHCFXQJF-UHFFFAOYSA-N 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- CABDFQZZWFMZOD-UHFFFAOYSA-N hydrogen peroxide;hydrochloride Chemical compound Cl.OO CABDFQZZWFMZOD-UHFFFAOYSA-N 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- -1 polytetrafluoroethylene Polymers 0.000 description 1
- 230000007261 regionalization Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000010129 solution processing Methods 0.000 description 1
- 238000009834 vaporization Methods 0.000 description 1
- 230000008016 vaporization Effects 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/302—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26 to change their surface-physical characteristics or shape, e.g. etching, polishing, cutting
- H01L21/304—Mechanical treatment, e.g. grinding, polishing, cutting
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
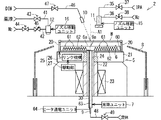
図1は、第1実施形態に係る基板処理装置1の内部のレイアウトを説明するための図解的な平面図である。基板処理装置1は、シリコンウエハなどの基板Wを一枚ずつ処理する枚葉式の装置である。この実施形態では、基板Wは、円板状に形成されている。
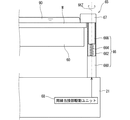
スピンベース21の周縁部には、その周縁に沿って等間隔を空けて複数個(ここでは、3個)の周縁当接部65が配置されている。ここでは、チャックピン20と周縁当接部65とが、スピンベース21の周縁部に沿って交互に配置されている。また、周縁当接部65各々は、プレート本体60の外周端よりも外方に配置されている。ただし、周縁当接部65の全体がプレート本体60よりも外方に配置されている必要はない。周縁当接部65のうち、上下動するプレート本体60の外周面に対向する部分(ここでは、シャフト部66)が、プレート本体60の外周端よりも外方に位置していればよい。
次に、第2実施形態について説明する。なお、以降の説明において、既に説明した要素と同様の機能を有する要素については、同じ符号またはアルファベット文字を追加した符号を付して、詳細な説明を省略する場合がある。
以上、この発明の一実施形態について説明してきたが、この発明は、さらに他の形態で実施することもできる。この発明の範囲に含まれるいくつかの形態を以下に例示的に列挙する。
3 制御ユニット
5 スピンチャック
6 ヒータユニット(加熱部)
6a 加熱面
7 昇降ユニット(接離部)
11 第1移動ノズル(処理液供給部)
12 第2移動ノズル(気体供給部)
20 チャックピン(チャック部材)
21 スピンベース
30 昇降軸
60 プレート本体
62 ヒータ
65,65a 周縁当接部(反り抑制部)
66,66a シャフト部
660 ベース部
662 筒状部
664 ばね部(弾性部材)
666 連結部
66Z 周縁当接部回動軸線
67 当接部
67a 周端面接触部
68 周縁当接部駆動ユニット
90 有機溶剤液膜(処理液の液膜)
W 基板
Claims (9)
- 基板の周縁を把持する把持状態と把持を解除する解除状態との間で変位する複数のチャック部材と、
前記複数のチャック部材に把持されている基板の上面に処理液を供給する処理液供給部と、
前記複数のチャック部材に把持されている基板の下方に配置され、基板を加熱する加熱部と、
前記基板の下面に対して前記加熱部を接離させる接離部と、
前記複数のチャック部を解除状態とし、前記加熱部が下面に当接している前記基板の上面に形成された液膜を基板の中央から周縁に向けて排除する液膜排除部と、
前記液膜排除部により液膜が排除されている基板の周縁に当接する周縁当接部と、
を備える、基板処理装置。 - 請求項1の基板処理装置であって、
前記周縁当接部が、前記基板の周縁部の上面に接触する接触部を含む、基板処理装置。 - 請求項2の基板処理装置であって、
前記接触部に接続され、前記鉛直方向に弾性変形可能な弾性部材、
をさらに備える、基板処理装置。 - 請求項2または請求項3の基板処理装置であって、
前記接触部の前記基板に接触する下部が、弾性材料によって形成されている、基板処理装置。 - 請求項1から請求項4のいずれか1項の基板処理装置であって、
前記周縁当接部を、前記基板の周縁部に当接する周縁当接位置と、前記基板の周縁部から離間する離間位置との間で移動させる周縁当接部駆動ユニット、
をさらに備える、基板処理装置。 - 請求項1から請求項5のいずれか1項の基板処理装置であって、
前記周縁当接部は、
前記基板の周端面に接触する周端面接触部、
をさらに備える、基板処理装置。 - 請求項1から請求項6のいずれか1項の基板処理装置であって、
前記加熱部は、前記基板の下面側から支持可能であるとともに、
前記接離部は、前記加熱部を上方へ移動させることにより、前記基板を前記チャック部材に保持されるときの位置よりも上側の上位置に移動させる、基板処理装置。 - その上面に処理液の液膜が形成された基板の下面に当接しつつ基板を加熱する加熱部と、
加熱部により加熱される基板の上面に形成された液膜を基板の中央から周縁に向けて排除する液膜排除部と、
液膜排除部により液膜が排除されている基板の反りを抑制する反り抑制部と、
を備える基板処理装置。 - 基板を処理する基板処理方法であって、
(a)上面に処理液の液膜が形成された基板の下面に加熱部を当接させつつ加熱する工程と、
(b)前記加熱部により加熱される基板の上面に形成された液膜を基板の中央
から周縁に向けて排除する工程と、
(c)前記工程(b)により液膜が排除されている基板の反りを抑制する工程と、
を備える、基板処理方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017181365A JP7064302B2 (ja) | 2017-09-21 | 2017-09-21 | 基板処理装置および基板処理方法 |
| PCT/JP2018/027670 WO2019058747A1 (ja) | 2017-09-21 | 2018-07-24 | 基板処理装置および基板処理方法 |
| TW107128018A TW201921579A (zh) | 2017-09-21 | 2018-08-10 | 基板處理裝置以及基板處理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017181365A JP7064302B2 (ja) | 2017-09-21 | 2017-09-21 | 基板処理装置および基板処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019057628A true JP2019057628A (ja) | 2019-04-11 |
| JP7064302B2 JP7064302B2 (ja) | 2022-05-10 |
Family
ID=65811265
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017181365A Active JP7064302B2 (ja) | 2017-09-21 | 2017-09-21 | 基板処理装置および基板処理方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7064302B2 (ja) |
| TW (1) | TW201921579A (ja) |
| WO (1) | WO2019058747A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015185803A (ja) * | 2014-03-26 | 2015-10-22 | 株式会社Screenホールディングス | 基板処理装置 |
| JP2016136599A (ja) * | 2015-01-23 | 2016-07-28 | 株式会社Screenホールディングス | 基板処理方法および基板処理装置 |
-
2017
- 2017-09-21 JP JP2017181365A patent/JP7064302B2/ja active Active
-
2018
- 2018-07-24 WO PCT/JP2018/027670 patent/WO2019058747A1/ja active Application Filing
- 2018-08-10 TW TW107128018A patent/TW201921579A/zh unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015185803A (ja) * | 2014-03-26 | 2015-10-22 | 株式会社Screenホールディングス | 基板処理装置 |
| JP2016136599A (ja) * | 2015-01-23 | 2016-07-28 | 株式会社Screenホールディングス | 基板処理方法および基板処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7064302B2 (ja) | 2022-05-10 |
| TW201921579A (zh) | 2019-06-01 |
| WO2019058747A1 (ja) | 2019-03-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6461621B2 (ja) | 基板処理方法および基板処理装置 | |
| JP6131162B2 (ja) | 基板処理方法および基板処理装置 | |
| JP6588819B2 (ja) | 基板処理装置および基板処理方法 | |
| JP6728009B2 (ja) | 基板処理方法および基板処理装置 | |
| KR102010720B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| JP7034634B2 (ja) | 基板処理方法および基板処理装置 | |
| JP6945314B2 (ja) | 基板処理装置 | |
| KR20150111316A (ko) | 기판 처리 방법 및 기판 처리 장치 | |
| JP6566414B2 (ja) | 基板処理方法および基板処理装置ならびに流体ノズル | |
| JP2018113354A (ja) | 基板処理方法および基板処理装置 | |
| CN108604546B (zh) | 基板处理方法和基板处理装置 | |
| JP6376553B2 (ja) | 基板処理装置 | |
| JP2022090061A (ja) | 基板処理方法および基板処理装置 | |
| JP6642868B2 (ja) | 基板処理方法および基板処理装置 | |
| JP6300314B2 (ja) | 基板処理装置 | |
| JP6317837B2 (ja) | 基板処理方法および基板処理装置 | |
| JP6226297B2 (ja) | 基板処理装置 | |
| JP6668448B2 (ja) | 基板処理方法および基板処理装置 | |
| JP7064302B2 (ja) | 基板処理装置および基板処理方法 | |
| TWI667076B (zh) | 基板處理方法及基板處理裝置 | |
| JP2016143873A (ja) | 基板処理方法および基板処理装置 | |
| JP6960489B2 (ja) | 基板処理方法 | |
| JP6771080B2 (ja) | 基板処理装置および基板処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220422 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7064302 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |