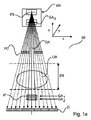
図1のパネルa)は、X線撮像装置IMの概略側面立面図である。X線撮像装置は、X線源XRと、前記線源XRの反対側の検査領域ERを横切って配置された放射線感受性検出器Dとを備える。好ましくは、必ずしもではないが、X線検出器Dは2D(2次元)である。言い換えれば、X線検出器は「真の」2D構造であり、複数の検出器ピクセルが、2D X線放射感受性面を形成するために、アレイとして列と行とで配置される。検出器ピクセルは、X線源によって放出されたX線放射線をレジスタし、レジスタされたX線放射線を、画像が導き出される電気信号に変換することができる。非限定の例示の実施形態は、フラットパネル検出器又は(アナログ若しくはデジタル)イメージインテンシファイアシステムを含む。代替として、X線検出器Dはまた、「ライン検出器」として配置されてもよい。ライン検出器は、検出器ピクセルの単一のライン又は複数の別々に離間された個々のラインを含む。複数の検出器ピクセルラインをもつライン検出器は、時々、マンモグラフィシステムで使用され、一方、単一ライン検出器は、時折、DPCI能力をもつCT(コンピュータ断層撮影)システムで使用される。
検査領域ERは、内部組成又は構成を撮像したい物体OBを少なくとも部分的にその中に受け取るように適切に間隔をあけられる。撮像すべき物体は、生命のないものであってもよく又は生命のあるものであってもよい。例えば、物体は、非破壊材料試験などのように撮像すべき1個の手荷物又は他のサンプルであることがある。しかしながら、好ましくは、(生命がある)「物体」が、人間若しくは動物の患者であるか、又は少なくともその解剖部分である医療状況が想定される。解剖部分である理由は、必ずしも物体の全体が撮像される必要がなく、注目する特定の解剖領域のみが撮像されるべきであるからである。
X線撮像装置IMは、X線源と検出器Dとの間に配置された干渉計IFをさらに備える。以下において、本明細書で提案するようなX線撮像装置の動作をよりよく説明するために、軸X、Y、及びZの基準座標系を導入することが便利である。軸X、Yは、検出器Dの視野の像平面又は平面を定義する。例えば、軸X、Yは、それぞれ、検出器Dの2つの隣接する縁部に沿って伸びるように選ばれる。軸Zは、像平面X、Yに垂直である。この軸は、一般に、X線源XRの焦点スポットFSから発出するX線ビームの伝搬方向に対応する。さらに、軸Zは、X線撮像装置の光軸OAと平行である。光軸は、X線源XRの焦点スポットFSから検出器Dの像平面の中心に延びる。光軸は、撮像領域に対して移動可能であり、特に、回転可能また平行移動可能である。例には、マンモグラフィスキャナ又はCアームX線撮像装置で使用されるCTスキャナ又はトモシンセシス撮像装置がある。
次に、図1a)に戻りより詳細に参照すると、X線撮像装置IMは、X線撮像装置に組み込まれた干渉計IFによって少なくとも部分的に与えられるマルチチャネル撮像能力を有する。本明細書で使用する「マルチチャネル撮像」は、特に、i)物体によって引き起こされる屈折作用の空間分布(これは位相コントラスト撮像である)及び/又はii)撮像物体OBによって引き起こされる小角散乱(暗視野撮像)作用の空間分布を撮像する能力を意味する。それに加えて、物体OBの吸収の空間分布を撮像するより伝統的なやり方も可能である。このタイプのマルチ撮像能力は、時には、DPCI(微分位相コントラスト撮像)と呼ばれるが、この命名規則は、それぞれ、他の画像信号、暗視野及び/又は吸収の撮像を除外するように解釈されない。
1つの実施形態では、干渉計IFは2つの回折格子アセンブリGA1及びGA2を含むが、本明細書では単一回折格子干渉計(単一の回折格子アセンブリのみを有する)を排除せず、後で以下に説明されるだろう。1つの実施形態では、干渉回折格子アセンブリGA1及びGA2は、X線源XRとX線検出器Dとの間に配置され、その結果、検査領域ERはX線源と干渉計IFとの間に画定される。より具体的には、2つの回折格子アセンブリGA1及びGA2が配置されるX線検出器の放射線感受性表面と焦点スポットFSとの間に空間があり、したがって、検査領域は、焦点スポットと回折格子アセンブリGA1との間、又は(もしあれば)ソース回折格子アセンブリGA0(これに関するもっと多くのことは後で以下に説明されるだろう)と干渉回折格子アセンブリGA1との間の空間によって形成される。変形として、図1に示したものと逆の干渉計幾何配置を代わりに使用することができる。この逆の幾何配置では、検査領域ERは干渉計IFの間に挟まれ、すなわち、検査領域ERは回折格子アセンブリGA1と回折格子アセンブリGA2との間に挟まれるか、又は単一回折格子干渉計の実施形態では、検査領域は回折格子アセンブリGA1と検出器との間にある。撮像装置は1つの実施形態では走査タイプのものである。トモシンセシスなどの1つの実施形態では、干渉計IFは可動走査アームに配置され、干渉計は、物体の下で水平又は曲線状走査運動で走査される。ある実施形態では、干渉計IFは(この実施形態では)固定検出器Dに対して走査され、一方、別の実施形態では、検出器D及び干渉計IFの両方が、一緒に走査運動で移動する。干渉計IFの回折格子アセンブリGA1、GA2のサイズは、検出器Dの放射線感受性表面の全体を本質的に覆うようになっているか、又は干渉計の回折格子アセンブリのサイズは、検出器Dの放射線感受性表面よりも小さい。オプションとして、線源XRと物体OBとの間にプリコリメータPCがある。加えて又は代わりに、さらに、物体と検出器との間にポストコリメータがある。
以下では、便宜上、回折格子アセンブリGA1を位相回折格子アセンブリと呼び、回折格子アセンブリGA2を分析回折格子アセンブリと呼ぶことが便利である。
簡単に上記したように、いくつかの実施形態では、干渉計IFの少なくとも1つの干渉計の回折格子GA1、GA2に加えて、ソース回折格子アセンブリと呼ぶさらなる回折格子アセンブリGA0が存在する。ソース回折格子アセンブリGA0は、X線源の焦点スポットFSから距離f0の近くに配置される。例えば、ソース回折格子G0は、X線管ユニットXRのハウジングのX線窓に配置される。ソース回折格子がある場合、検査領域は、ソース回折格子アセンブリGA0と干渉計IFとの間に、特に、ソース回折格子アセンブリGA0と回折格子アセンブリGA1との間にある。ソース回折格子G0の機能は、干渉計IFが動作のためにコヒーレンスを必要とするとき、放出された放射線を少なくとも部分的にコヒーレントにすることである。固有コヒーレント放射線を生成することができるX線源が使用される場合、ソース回折格子アセンブリGA0を省くことができる。
1つ又は2つの干渉回折格子アセンブリGA1、GA2及びソース回折格子アセンブリGA0の各々は、それぞれ、本明細書ではソース回折格子G0、位相回折格子G1、及び(もしあれば)分析回折格子G2と呼ばれるそれぞれの回折格子構造、又は略して「回折格子」を含む。総称的に、それぞれの回折格子は本明細書では「Gi」と呼ばれ、GAiはそれぞれの回折格子アセンブリへの総称呼称であり、ここで、i=0,1,2である。
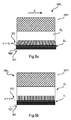
1つの実施形態では、回折格子Giは、シリコンウェハなどの好適な基板(矩形又はさらに正方形であるが、円形などの他の形状が他の状況では要求されることもある)をフォトリソグラフィ処理することによって製造される。図1b)は、X軸に沿った回折格子プロファイルのクローズアップを示し、参照番号210は回折格子構造の1つの縁部を示す。回折格子Giの平面は、X−Y面と本質的に平行である。周期的刻線のパターンが、一連の平行なトレンチとしてシリコン基板の表面に形成され、任意の2つの隣接するトレンチは、それぞれのバー又はリッジRDによって分離される。図1b)において、刻線(すなわち、トレンチ及びリッジRDのパターン)はY方向に沿って延びる、すなわち、図1の描画面中に伸びる。X軸は、リッジRG/トレンチTRを横切って垂直に延び、Z軸は回折格子Giの平面に垂直である。分析回折格子G2の場合には、トレンチTRは、所望の減衰挙動を生じさせるために、金又は他の高Z数材料などの好適な充填材料で充填される。トレンチTRは、Z軸と平行に延びる特定の深さdで基板中に形成される。深さは、基部本体202が基板の残りの部分によって形成されるように、グレーティングGiの完全性を保持するために基板の全高Hには達しない。刻線が基板の一方の表面(図1bでは下面である)に適用された後、そのようにして得られた回折格子Giは、構造的に、前記基部本体202を含み、前記基部本体202からリッジRGが突き出ており、いずれのリッジRDも側面のどちら側にもそれぞれのトレンチTRを有することが理解できる。各リッジRGは、それぞれのリッジが基部本体202に移行する基部部分202を有する。前記基部部分202から遠位に、各リッジのそれぞれの先端部分206がある。それぞれの先端部分206は、リッジRGごとにそれぞれの末端部分208へと終端する。次いで、それぞれの末端部分208は、刻線されない他方の遠位面とは対照的に、回折格子Giの刻線面(本明細書では「第1の」面とも呼ぶ)を一緒に形成する。刻線の機能は、吸収回折格子G0及びG2の場合にはX線を部分的に吸収することであり、位相シフト回折格子G1の場合には回折ベースタルボット干渉パターンを作り出すことである。これは、以下でより詳細に説明されるだろう。機能的に、及び様々な回折格子アセンブリGAiの命名と矛盾せずに、回折格子G1は、吸収材回折格子又は好ましくは位相シフト回折格子のいずれかであり、一方、G2は吸収材回折格子である。放射線コヒーレンス付与ソース回折格子G0は、一般に、吸収材回折格子である。しかしながら、他の機能的組合せを本明細書では排除しない。シリコンの回折格子構造が本明細書では主として想定されているが、他の材料、例えば、いくつかのタイプのプラスチックなどは排除されない。
刻線パターンは1次元パターンであることが好ましいが、チェッカーボードパターンを与えるなどの2次元とすることもできる。この場合、2組のトレンチ又はリッジがあり、一方の組はY方向に延び、一方、他方の組はX方向に第1の組を横切って延びる。1Dの例では、刻線は、基板の表面を横切って一方向にのみ伸びる。
DPCI、又はより一般的には干渉計撮像操作の間、少なくとも部分的にコヒーレントな放射線が、ソース回折格子G0(もしあれば)の下流に現れ、次いで、検査領域ERを通過し、その中の物体OBと相互作用する。次いで、物体は、放射線への減衰、屈折、及び小角散乱の情報を変調し、それは、次いで、干渉計IF回折格子G1及びG2の動作によって抽出される。より詳細には、回折格子G1は、コヒーレント放射線を位相シフト干渉パターンに回折し、これは、次いで、分析回折格子G2があるところで複製される。分析回折格子は、本質的に、回折干渉パターンに符号化された位相シフト情報を強度パターンに変換し、強度パターンは、次いで、モアレパターンの縞としてX線検出器Dで検出することができる。より詳細には、物体が検査領域にない場合、較正撮像手順中に通常捕捉される、参照パターンと呼ばれる、X線検出器Dで検出可能な干渉パターンが依然として存在する。モアレパターンは、2つの回折格子が完全には平行とならないように、特に、例えばわずかな湾曲を誘起することにより2つの回折格子G1とG2との間の相互空間関係を調節するか又は「調整外しする」ことによって発生する。今、物体が検査領域に存在し、上記のように放射線と相互作用する場合、ここではより適切には物体パターンと呼ばれるモアレパターンは、参照パターンの乱されたバージョンとして理解される。次いで、参照パターンからのこのずれを使用して、3つの画像(減衰、位相コントラスト、暗視野)のうちの所望の1つ、2つ、又はすべてを計算する。良好な撮像結果では、回折格子G1、G2の調整外れは、モアレパターンの周期が検出器の視野を横切ってごくわずかのサイクル(2つ又は3つ)の間拡大するようなものである。モアレパターンは、3つの画像のうちの少なくとも1つ(特に、すべて)を抽出するために、例えばフーリエ処理される。位相ステッピング技法などの他のタイプの信号処理が、さらに、本明細書では想定され、他のところで報告されており、例えば、「Phase retrieval and differential phase−contrast imaging with low−brilliance X−ray sources」、Nature Physics 2、258〜261(2006)におけるF Pfeiffer等による位相ステッピング技法又は「High−speed X−ray phase imaging and X−ray phase tomography with Talbot interferometer and white synchrotron radiation」、OPTICS EXPRESS、2009年7月20日/17巻、15号におけるA Momose等のフーリエ法などである。側方観察として、及び完全を期すために、干渉計IFの単一回折格子の実施形態が、分析回折格子G2の機能をX線検出器D自体に統合することによって実施される。これは、1つの実施形態では(必ずしもすべての実施形態ではなく)、G2機能を再現するために、ピクセル幾何配置、特に、ピクセル間の相互間隔を注意深く配置することによって達成される。この実施形態では、X線検出器Dは、微分位相コントラスト撮像及び/又は暗視野撮像の目的で、回折格子G1によって生成された干渉パターンを検出する、すなわち、十分に解像するために、ピクセルピッチを十分に小さくし、したがって、空間解像度を十分に大きくすることが好ましい。その目的のために、X線検出器は、例えば約1マイクロメートル又はさらに高いようなマイクロメートル範囲又はサブマイクロメートル範囲の空間解像度をもつ高解像度X線検出器とすることができる。
上述のような干渉計IFは、タルボット−ロウ干渉計と一般に呼ばれるものである。干渉計X線装置の撮像能力の精度のほとんどは、モアレパターン又は干渉パターンが検出器Dのところで検出される明確さ次第である。前記明確さは、「可視性」の干渉概念によって定量化される。可視性は、例えば、比(Imax−Imin)/(Imax+Imin)として定義された実験的に実証可能な量である。言い換えれば、可視性は、干渉パターンの「変調度」、すなわち、縞振幅と縞振動の平均値との比として理解される。そしてまた、干渉パターンの可視性は、少なくとも部分的に、X線放射線(X線源によって生成されたような)が干渉計及びソース回折格子G0(もしあれば)を照明する「設計エネルギー」の関数である。
可視性に影響を与える別の要因は、回折格子の幾何配置、特に、それぞれ、ソース回折格子G0、位相回折格子G1及びG2のアスペクト比及びピッチp0、p1、P2である。本干渉計のコンテキストで使用する「ピッチ」は、回折格子刻線の空間周期を記述する。アスペクト比は、回折格子の基板に形成されたそれぞれのトレンチTRの深さdと、2つの隣接するトレンチの間の距離との間の比を記述する。
設計エネルギーにおける放射波長と一緒に回折格子の幾何配置は、ソース回折格子G0と位相回折格子G1との間の距離l(図示せず)、いわゆるタルボット距離、すなわち、干渉計の中の回折格子G1と回折格子G2との間の回折格子間距離d(図示せず)を決定する。干渉計撮像の精度は、干渉パターンの初期に述べた複製が必要な可視性で生じるのはそこのみであるので、回折格子幾何配置の精度及びタルボットの距離の順守の精度に基づく。例えば、ソース回折格子G0は吸収材回折格子として働くので、これは、この機能を適切に実行するために、必要とされるトレンチ高さに特定の要件を課する。G1線源によって生成されるような干渉パターンを拡大して干渉パターンを検出器のところで所与の解像度で検出可能にするために、上述で説明したように本質的に動作する分析回折格子G2(さらに一般に吸収材回折格子として構成される)には、同様の要求が必要とされる。さらに、回折格子G1は、干渉パターンを、下流に向かって所望のタルボット距離(吸収材回折格子G2が位置づけられる)において正確に定義された位相シフト(通常、π又はπ/2)で生成するように構成される。再度、干渉パターンが、必要な位相シフトで所望のタルボット距離において正確に複製されるのを確実にするために、好適なアスペクト比が、所与の撮像タスクにとって望ましい特定の設計エネルギーでは必要とされる。
しかしながら、撮像システムIMが、正しい回折格子幾何配置と、正しいタルボット距離に設定された干渉計IFとにより、想定された設計エネルギーで動作される場合でさえ、依然として、放射線シャドウイングによって引き起こされる可視性の損失が観察される。言い換えれば、入射放射線の一部は干渉パターンを生成するのに使用されない。この影響は、放射線の方向がトレンチの厚さ又は深さDの方向と平行でなく、それに対して傾いている場合に特に顕著である。言い換えれば、この影響は、放射線ビームの幾何配置が平行ビームではなく扇形ビームである場合に避けられない。トレンチが光軸から離れるほど、放射線シャドウイング効果は顕著になる。
放射線シャドウイング効果に対処する対応策として、回折格子アセンブリGAiは、それぞれの回折格子構造Giに加えて、それぞれの回折格子GIの刻線表面に付けられた電磁トランスデューサシート又はフォイルを含む。電気機械トランスデューサフォイルは、特に、電歪材料の層ELから形成される。この層は、回折格子構造の刻線表面に、すなわち、リッジの先端又は末端部分208に十分な把持及び剛性で結合される。電歪層は、1対の(好ましくはコンプライアントな)電極ECを通して電圧を印加する際、静電圧力が生じる性質を有する。これは、電歪層の機械的圧縮をもたらし、層は、方向Zに、すなわち、層の厚さの方向に、又は言い換えればリッジの高さdの方向に収縮する。層材料の想定される非圧縮性のために、層は、当然、層の面の2つの空間的方向X、Yに膨張しようとする。リッジが延びる方向を横切るX方向の歪み成分は、X軸に沿ってリッジを横切る横の力を及ぼす。適切に調節された場合、回折格子構造Giの一部、特にリッジは、前記横の力によって前屈して、電圧が適切に選ばれるならば撮像装置IMの焦点スポットFSと一致する回折格子アセンブリの外側の焦点に又はそれに向かって少なくとも部分的に整列する。次いで、そのように整列したリッジ間のトレンチは、同様に、焦点に整列し、次いで、より高い割合の放射線エネルギーが干渉パターンへの回折に使用され、それにより、効率が向上する。
より詳細に、図2は、回折格子アセンブリGAiを横切るZ−X面の断面を示す。具体的には、図2は、弛緩状態又は非通電状態、すなわち、電圧が電極ECを通して印加されていないときの回折格子アセンブリを示す。すべてのリッジRDが、今は、光軸と平行に整列している。この状況では、放射線シャドウイングが、扇形ビームに対して生じる可能性がある。対照的に、図3による同じ面を横切る断面図は、通電状態、すなわち変形状態の回折格子アセンブリGAiを示しており、電歪層が、作動電圧U0の印加によって横方向膨張へと変形されている。したがって、リッジの先端208への層ELの機械的結合により、リッジRD、トレンチTRは、撮像装置の焦点スポットFSのような共通の場所に向かって整列する。言い換えれば、回折格子アセンブリGAi、より具体的には、回折格子構造Giは、撮像装置の焦点スポットに合焦される。電歪層の横方向膨張によって加えられる横の力は、回折格子構造にX軸に沿って両方向(負及び正)に作用する。その結果、リッジのうちのいくつか、すなわち、回折格子の一方の縁部の方に位置するものは右に屈曲され、回折格子の他方の縁部の方に位置するものは左に屈曲され、一方、回折格子Giの中心領域に位置するリッジは概して乱されないままである。言い換えると、リッジが回折格子構造の中心から離れるほど、曲り又は傾斜が顕著になる。その時好ましくは、アセンブリGAiは、光軸OAが回折格子Giの前記中心部分を通って延びるように撮像装置IM内に装着される。理想的には、リッジは、曲げられるというよりはむしろ対照的に傾斜されるか又は斜めにされ、早めの挙動が、回折格子構造に十分な可撓性の材料を使用することによって促進される。図3に示すように、電歪層ELが反対方向に(X及び−Xに沿ってということであるが)リッジを引き伸ばすように作用するので、焦点は、回折格子Gi「の後に」(Z方向に沿って見たとき)画定される、すなわち、焦点は、X線源と回折格子Giとの間の空間に位置する。さらに言い換えれば、回折格子アセンブリGAiは、使用の時、リッジが、回折格子構造の基部本体から離れて且つX線源XRから離れて撮像装置の検出器の方に突き出るように撮像装置内に装着される。
次に、図4を参照して、電歪プロセスの特性がより詳細に検討され、膨張挙動が本目的のためにどのように有用に扱われるかが検討される。誘電定数εを有するエラストマで製作された初期の高さ又は厚さh0の層EL又はフォイルは、図4aのように上面及び下面にコンプライアント(すなわち、可撓性)電極を備える。前に導入した基準X−Y−Zのフレームと一致させるために、縁部a、bはそれぞれ軸X及び軸Yと平行に延び、高さhすなわち層厚はZ軸に沿って伸びると仮定する。これらの電極に大きさUの電圧を印加すると、電荷が電極に現れ、それにより、静電力に起因して、層の表面に垂直な力がこれらの電極の間にもたらされる。電極表面の面積当たりの力は圧力であり、層ELはそれに耐えなければならない。
圧力pは次式で与えられる。
p=εo×ε×E2、ここで、E(電界)はE=U/hで与えられる、
εo=真空中の誘電率、
ε=材料依存比誘電率、
h=フォイルの残存厚、すなわち、電圧の印加中の厚さ(対照的に、上述で導入したhは、電圧が印加されていないときの弛緩状態の厚さを示す)
圧力は、フォイルに機械的応力σhを誘起し、歪み応答shが生じる。応力−歪関係は、ヤング率Yを介して、
σh=Y×sh(応力−歪み関係)
によって記述される。
表記法の簡単な注釈:電界Eとの混同を避けるために、ここでは、応力−歪み関連における弾性率Eではなく「ヤング率Y」という用語を使用する。
基本的な事実の要約:
a)プレート内の応力は電界によって引き起こされた圧力によってもたらされる、
b)垂直方向の応力σhの大きさは、印加される静電圧力の大きさに等しい:(σh=p)、
c)垂直方向の歪みshは応力−歪関係によって与えられる。
したがって、sh=−p/Y=−εo×ε/Y×E2=−Q×E2であり、
ここで、符号「−」は、電界/電圧が印加されたときプレートの厚さhが収縮することを示す。量Q=εo×ε/Yは材料の電歪係数として知られている。ここから、高い誘電率ε及び高い弾性1/Y(低いヤング率)をもつ材料は電歪に関して最適な材料であることが分かる。
次に、垂直歪みshがどのように層表面と同一な面の横歪みsl面内に変換するかという問題を調べる。これに答えるために、エラストマの大部分が圧縮できないという事実を利用する。これは、プレートの体積Vが一定のままであることを意味する。それゆえに、初期の体積では、V=ho×ao×bo=一定である。電歪の場合、V=ho×(1+sh)×ao×(1+sa)×bo×(1+sb)=ho×ao×boが得られ、ここで、それぞれ、軸Z、X、及びYに沿った適切な方向の歪みとしてのsh、sa、sbがある。
等方性の挙動を有する均一な材料では、共通の横歪みslが、sa及びsbに対してsl=sa=sbのように導入される。体積は一定のままであるので、(1+sh)×(1+sl)2=1に達する。この式をslについて解くと、小さい歪みshに対して、sl=1/(sqrt(1+sh)−1≒−0.5shが得られる。定義によりプレートの横方向膨張を抑制しないコンプライアント電極の場合、プレートは、電圧が印加されたとき垂直歪みshの半分(高さ減少と比較して)でa方向及びb方向に自動的に伸ばされる。この場合が図4bに略図で示されている。次のステップ(図4cを参照)において、第1の制約を導入する。ここで、下部電極が、両方向、すなわちa方向及びb方向に非コンプライアントである(すなわち、堅い)と仮定される。これは、十分な剛性の剛体プレート上に電極を接着することによって達成される。今では、エラストマプレートの下面の膨張は可能でなく、下面ではa=ao及びb=boである。上面の電極は依然としてコンプライアントなままである。この制限の下で、プレートの以前の矩形形状は、図4cにおいて上下逆さに配置された平坦な角錐台に変換する。最後のステップにおいて、第2の制約を導入し、上面はa方向にのみ膨張することができる。b方向の膨張は、どんな手段によってでも阻止される。結果が図4dに示されている。初期に図面の面と同一な面であった層ELの垂直壁の方向a−h(Zに沿った)は、X−Y面に平行な面を保ったままである。しかしながら、図面の面に垂直な層ELの壁b−h、すなわち、Z−Y面と平行なものは、反対方向に対称的に斜めにされる。結果として、層ELのZ−X面(「前面及び裏面」)の層ELの断面は、台形状を呈する。
体積一定の条件の適用から、歪み関係は、
sua=−2×sh
を与える。
プレートの上面のa方向の歪みの大きさsuaは、電界/電圧によって引き起こされる高さ方向の歪みの大きさshの2倍である。したがって、抑制(非コンプライアント)電極のこの特殊な場合には以下の関係に達し、X/a方向の上面の予想される歪みsuaは、
sua=−γ2×sh=−γ×2×εo×ε/Y×E2=−γ×2×Q×E2=−γ2×Q×(Uo/ho)2 (1)
であり、ここで、1に関する補正係数としてのγは、図4dで想定したような理想的な幾何配置からの偏りを償う。
図4c)及び図4d)に関連して上述で説明したような層ELの部分的変形挙動は、好ましいものである。これらの挙動は、変形をより効率的に使用するために、層ELの変形作用又は歪みを制限する好適な制限機構を配置することによって実現される。言い換えれば、変形制限機構は、層の望ましくない変形を制限し、望ましい場所に変形作用を集中させるのに役立つ。理想的には、層ELの一部が、横方向膨張により変形すると想定される回折格子の刻線表面に結合される。より具体的には、変形制限機構により、変形作用は、前記一部において横向きに制限される。変形制限機構は、1つの実施形態では、図2及び図3の実施形態に示したようなプレートSP2などの補強材要素によって達成される。補強材プレートは、回折格子構造の遠位にある電歪層の表面に十分な把持及び剛性を伴って融着又は接着によって結合される。言い換えると、補強プレートSP2は、回折格子構造GIの刻線表面に接着される表面から遠位にある電歪層の他方の表面に貼り付けられる。したがって、回折格子Giに結合される電歪層の部分は、遠位の部分よりも多い変形を経験し、変形作用は回折格子界面において横方向の作用に集中し、それにより、図4dによる構成を実現する。言い換えれば、コンプライアント電極ECのシステムを層ELの表面に適用すると、図4に匹敵する状況を有することになる。層ELと回折格子先端部分206との間の、例えば接着を介した、結合、及び層の遠位表面と(下部の)平坦化プレートSP2の対向表面(図2及び図3では上部)との間の結合が十分に大きい場合、図4dのように層ELの横方向膨張に対して自由の状態が部分的に抑制される。次に、電圧がコンプライアント電極CEのシステムにより印加されると、層の矩形断面(X−Z面又はY−Z面)は、層の横方向膨張への自由のみが、回折格子GiのリッジRDが延びる方向(X)に対して垂直な方向に回折格子リッジ206の先端206で与えられるので、初期の断面(例えば、矩形断面)から台形断面に変形する。したがって、回折格子リッジRGの先端206は、図3に示すように、電歪層の上面の膨張によって(水平な)方向Xに徐々にシフトされる。回折格子Giに結合された層の表面の対称な膨張のために、リッジRGは、今では、理想的には焦点スポットFSと一致する回折格子アセンブリの外側の焦点に「仮想的に」合焦されるように見える。変形制限機構SP2の効果は、印加電圧の単位当たりの横歪みの増加である。これを、リッジの曲りによる「仮想」合焦と呼び、これを、図11〜図13において以下でより詳細に説明するようにリッジを実際に傾斜させることによって達成可能な焦点への真の合焦又は整列と対比させる。
さらなる実施形態によれば、刻線表面から遠位の、すなわち、リッジから遠位の回折格子構造GIの非刻線面に堅く固定された第2の補強プレートSP1がある。言い換えれば、この実施形態では、回折格子構造GIは、2つの比較的薄い剛体補強プレートSP1、SP2間にサンドイッチ状にクランプされる。第2のプレートSP1は、単独で及びプレートSP2と組み合わせて、実質的に先端部分206のみを横方向に変形させ、一方、回折格子の残りの部分、特に本体202を平坦に保持することによって、電圧当たりの横歪みの効率をさらに向上させるブースタとして働く。
1つの実施形態では、補強プレートSP1、SP2は、回折格子構造及び/又は電歪層ELよりも高い剛性を有する好適な材料、例えば、CFK(炭素強化エポキシ)などから形成される。2つの補強プレートSP1、SP2は、同じ材料から形成されてもよいし、又は異なる材料から形成されてもよい。それらは同じ剛性を有することができ、又はそれらは、各々それぞれ電歪層及び回折格子構造の異なる剛性要件に対応する異なる剛性(例えば、異なる厚さのために)を有することができる。好ましくは、プレートSP1、SP2は、Z方向に見たとき、形状及び/又はサイズが回折格子G1と一致する。好ましくは、補強プレートSP1、SP2は回折格子Gi及び層ELと同一の広がりを有する。補強要素SP1、SP2は、必ずしも回折格子又は層ELのそれぞれの面の全体を覆わない。例えば、補強プレートSP1、SP2は、必ずしも閉じた表面を形成するのではなく、「貫通孔」又は穿孔を有する。例えば、プレートSP1、SP2の一方又は(もしあれば)両方は、それぞれの格子構造又は網目構造として配置されてもよい。
図5a)及び図5b)は、第2の実施形態による回折格子アセンブリのGAiの2つの断面図を示す。上述の図2及び図3のように、図5a)及び図5b)は、それぞれ、変形した及び変形していない2つの状態を表す。この実施形態は、一般に、図2及び図3の実施形態と同様であるが、第2の補強プレートSP2が省かれている。言い換えれば、以前に図2及び図3の実施形態で説明したような回折格子構造Giに結合された単一の補強プレートSP1のみがある。この単一の補強プレートの実施形態は、回折格子構造のリッジへの変形作用(特に、電歪層ELの膨張によって誘起される横歪み)を制限するのに役立つ。回折格子構造の残りの部分、特に基部本体202は、変形されないか又は少なくとも実質的に変形されないままである。上記のように、回折格子の基板202は、回折格子基部の平坦度を保証するために、平坦化プレートSP1上に貼り付けられる、例えば接着される。電歪層ELは、コンプライアント電極ECを備え、さらに回折格子の先端206に接着される。次に、電歪プロセスにより、層ELは、上面及び下面の両方で水平方向に横方向に膨張する。断面は、剪断応力が現れない矩形のままである。この実施形態では、単一の補強プレートSP1しか使用されないので、電歪プロセスの感度Q(電界の平方単位当たりの歪み)は、ほぼ半分になる(すなわち、式(1)の係数「2」は落ちる)。
電歪係数Qの大きさには数値例としてQ≒5×10−16m2/V2を採用し、ポリウレタンベースポリエステルの100μm厚層を回折格子Giに適用したとき、出願人は、ある撮像装置IM(マンモグラフィ撮像装置など)においてわずか約U0≒30Vの電圧の印加によって所望の焦点の合焦スポットを達成したことを観察した。この場合、回折格子Giの外側エッジの近くの回折格子リッジの先端206の曲りは、約1μmである。100μmフォイルに印加された30V(E=0.3MV/m)は、エラストマフィルムの絶縁破壊強度(≒50MV/mから200MV/m)よりもはるかに少ない。
電歪層ELには、任意の好適なアモルファス又はガラス質固体を使用することができる。特に、電歪層ELは非晶質構造を有する。より具体的には、1つの実施形態では、電歪層ELはシリコン又はポリウレタンベースポリマーである。さらにより具体的には、電歪層ELは誘電エラストマである。電歪層ELのアモルファス又はガラス質材料特性は、弾性を与える。言い換えれば、電圧が印加されない場合、電歪層は元の形状に戻る。言い換えると、リッジが平行でなく、撮像装置の焦点スポットに整列している合焦状態を維持するためには、撮像の間電圧をオンに切り換えたままでなければならない。電圧をオフに切り換えると、層ELは非刺激状態に戻り、その結果、その時リッジが再び平行になるのでリッジの合焦が失われる。好適な電歪材料は、例えば、「Electrostriction of a Polyurethane Elastomer−Based Polyester」、IEEE Sensors Journal、6巻、4号、2006年、876〜880頁にI. Diaconu等によって、又は「Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation」、Sensors and Actuators A 64(1998年)77〜85頁にR. E. Pelrine等によって記述されている。
電歪層ELのX線露光の繰り返しは、ある程度の劣化を時間とともにもたらすことがある。しかしながら、好適な温度での焼もどし及び/又は硬化処理を時折行うことによって層ELをある程度「修復する」ことができることが見いだされている。この修復処置で使用される温度及び適用の頻度及び/又は持続時間は、一般に、手元の電歪層ELの特性、例えば、厚さ、使用されている材料などに依存する。このX線修復処置は、外部のマイクロ波又は赤外線源からの単純な露光によって実施される。代替として、この線源は撮像装置に統合されてもよい。アセンブリGAiに統合された電熱線による熱的加熱も想定される。例えば、硬化処理又は焼もどしによる修復処置を達成するために、電熱線の1つ又は複数のループが回折格子アセンブリGAiのフレームに統合されてもよい。好ましくは、層ELは、それが適用される回折格子の刻線表面と同一の広がりを有する。言い換えれば、層ELは、回折格子の刻線表面の全体を覆う。しかしながら、層ELが回折格子の刻線表面よりも面積において小さい又は大きい実施形態を本明細書では排除しない。
電歪層ELに活性化電圧を印加するための1対の電極ECは、別々のコンプライアントな構成要素として配置される。例えば、1つの実施形態では、電極は、電歪層の両面に付けられる、グラフィックパウダーなどの好適な材料から又は好適な金属からのそれぞれの被覆である。特に、電極は、電歪層を横切る均一な電界を作り出すのを促進するようにループ構造(閉ループ構造)として配置される。
代替として、分離した構成要素として電極を別々に配置することは、補強プレートSP2と回折格子構造の両方のそれら自体をそれぞれの電極として使用し、図2及び図3の実施形態に示したように電歪層を挟むことによって避けることができる。単一の補強プレートSP1のみが使用される図5の実施形態では、1つの電極は被覆として電歪層ELの遠位側に付けられ、一方、第2の電極の役割は回折格子構造が引き受ける。回折格子GI及び補強プレートが電極として使用される場合、それらは必要な導電率を有することが保証されなければならない。例えば、その時、これらの構成要素はシリコン又は金属ベース構成要素から形成される。回折格子Giのピッチの約10倍に等しいか又はそれを超える電歪層ELの厚さでは、電界は、層ELの厚さにわたって十分に均一であり、そのため、電気歪効果の効率の著しい損失は予想されない。図4c)、図4d)に示した通りに変形制約を実現するために、プレートSP2又はSP1を使用する代わりに、非コンプライアントな少なくとも1つの電極をもつ電極ECのシステムを代わりに使用することができることが上述の図2〜図3及び図5から明らかであろう。
それぞれ、回折格子構造と補強プレート及び電歪層との間の機械的結合を向上させるために、好適な接着層がそれぞれの面の間に置かれる。特に、リッジ先端208と、電歪層のそれぞれの表面との間の界面では、先端を電歪層に直接接着するのではなく、接着層が中間に置かれる。これは、良好な剛体結合を促進するだけでなく、回折格子構造Giと電歪層とを一緒に接着する場合にそれらが互いの方に押し付けられるとき、接着剤がトレンチにしみ込むことも防止する。
図6は、それぞれの表面対の間の、すなわち、それぞれ、電歪層及び回折格子構造Giの対向する面の間の、並びに補強プレートSP1及び回折格子構造Giの対向する面の間の把持及び機械的結合を促進する仕方の別の解決策を示す。例えば、及び1つの実施形態によれば、リッジRDの末端部分208に結合されるべき電歪層の面は、層ELの横方向膨張の間互いに連結する接触面を形成するために、粗化することによって又はさもなければパターンを施すことによって構造化される。より具体的には、電歪層のそれぞれの面は、層が回折格子Giに接触して押し付けられるとき各々が回折格子の末端部分の1つ又は複数を少なくと部分的に受け取るような形状及びサイズで形成された鋸歯プロファイル又は矩形窪みのパターンによって構造化される。末端先端部分208は、窪みのそれぞれのものと位置合わせされ、それにより、層の横方向膨張の間回折格子と層とが効果的に連結し、一方、その時、リッジRDは、屈曲され、焦点スポットに整列する。窪み又は「パッチ」は対称とすることもでき、又は非対称とすることもできる。例示的な実施形態では、電歪層の受取面は、約1μmのリッジ幅を仮定して、リッジRDに沿ったy方向に10μmから100μm及びリッジRD方向を横切って垂直にx軸に沿って約0.1μmから0.3μmなどの矩形パッチ又は帯状パッチに非対称的に構造化される。パッチの高さ又は「深さ」は、約0.1μmから1μmである。パッチは、さらに、正方形又は他の形状などの(完全に)対称な構造として配置されてもよい。
把持の改善のための同様の構造が、回折格子構造の遠位面及び補強プレートSPに適用されてもよい。矩形構造をもつ例示的な実施形態が、図6の右及び下にX及びY方向の2つの側面プロファイルで示されている。図6の中央部分は、Z方向における、電歪層の表面又は回折格子構造の非刻線遠位面の平面図を与える。密度高く影付けされた正方形は浮き出し領域を表し、一方、薄明るい正方形は凹みを表す。使用時に、一方の面の浮き出し領域は、電圧が電歪層ELにわたって印加されたとき電歪層ELの横方向膨張によって引き起こされるX軸に沿った横歪みに対して連動するように、他方の面に形成された対応する凹みと位置合わせされる。図6のパターンは2次元であるが、1次元パターンは、リッジRGの道筋を横切るX方向に沿った横歪みに対して連動するのに十分である。これらの実施形態のいずれにおいても、それぞれの面にパターンを施すのは、例えば打抜加工又はダイエンボシングなどによって行われる。
回折格子リッジRD、したがって、トレンチは、1つの実施形態では、回折格子構造GIの表面にわたって連続的に及び/又は直線的に伸びているが、これの代替実施形態も想定される。例えば、トレンチ及び回折格子は、横方向の間隙又は「切込み」によって中断されてもよく、したがって、連続的なラインを形成しない。これにより、電歪層ELの横方向の変形によるリッジの曲げがより容易になる。さらなる別の実施形態で、図7a及び図7bに示すように、直線以外のリッジRGの道筋も想定される。図7a及び図7bによって与えられる図は、z軸に沿っており、したがって、平面図を与える。例えば図7aの実施形態では、回折格子リッジRGは、直線的に伸びるのではなく、1組の同心円として配置され、肉太の黒色レンダリングで示された各円はそれぞれのリッジを表し、それぞれの円形トレンチがそれらの間にある。再度、リッジ剛性を低減させ、それにより、より容易な曲げ又は傾斜を促進するために、それぞれの円形リッジは、1つの実施形態では、直線構成に対して上記したように、リッジを横切って横断して切り込んでいる一連の間隙によって中断される。間隙は、図7aに示すように均一に配置されてもよいが、さらに各リッジRGを横切って不規則なパターンでランダムに配置されてもよい。図7aによる規則的パターンでは、リッジ間隙は、さらに、半径方向に整列して配置される。図7bの実施形態では、リッジは、互いに入れ子にされた多角形風に配置される。一連の直線リッジセグメントによって形成される個々の「リッジ多角形」RGは、回折格子構造ディスクGiの中心点に中心がある同心多角形を形成するように配置される。再度、隣接するセグメント間に形成される間隙は、規則的に、より詳細には、各多角形に沿って規則的に、及び/又は複数の同心状に配置された多角形セグメントを横切って規則的に放射状に配置される。
電歪層EL及び/又は補強要素SP1、SP2(もしあれば)の形状は、形状及びサイズにおいて回折格子構造と本質的に同一の広がりを有することが理解されよう。例えば、図1〜図6において前に論じた実施形態では、回折格子構造は、Z軸に沿って、本質的に矩形又は正方形のフットプリントを有し、プレートとして配置された層EL及び補強要素SP1、SP2もまた同様である。回折格子が図7におけるように円形の実施形態では、電歪層及び/又は補強要素は、プレートではなく補強ディスクとして配置されることによってこれに合致する。しかしながら、形状のこの合致は、必ずしもすべての実施形態に存在しない。例えば、円形回折格子が、異なる形状、例えば矩形を有する電歪層及び/又は補強プレートと組み合わされる実施形態が想定される。或いは、代替の矩形回折格子が、円形の電歪層EL又は補強ディスクSP1、SP2と組み合わされる。好ましくは、回折格子構造のフットプリント(Z軸に沿った)が一般に電歪層又は補強要素SP1、SP2よりも小さいという要件がある。電歪層及び/又は補強要素への回折格子構造の貼付けは、電歪層の横歪みによって与えられた横方向膨張力に耐えることができる機械的結合の形成を可能にする任意の好適な手段(融着又は接着など)によって達成される。
状況によっては、回折格子リッジの剛性のために、すべてのリッジの反力が合計される。特に、回折格子Gi(x=0)の中心部の近傍においてである。これは、リッジの望ましくない非線形変位プロファイルをもたらす。線形変位プロファイルを促進するために、一連の異なる電極対が、リッジの非線形変位プロファイルに応じて使用される。次いで、各対の電極は異なる電圧を生じさせる。例えば、リッジ先端を変位させるためにより高い総力の要求がある回折格子構造の部分(例えば、X軸のx=0の近く)では、リッジのこれらの領域に作用するより多い量の横の力を引き起こすために、より高い電圧が印加される。言い換えれば、単一の電極対を使用するのではなく、複数の電極対が、回折格子Giにわたって分散して使用され、局所剛性要件に対応する特定の場所依存電圧を供給するために個々に調節される。均一な変位プロファイルを達成する1つの手法は、較正手順において、均一の電圧を回折格子構造に印加し、次いで、局所変位プロファイルを調査することである。回折格子構造の異なる領域では、その時、異なる電圧要件が記録され、次いで、それぞれの電圧をもつ適切な一連の電極が設計される。代替として、線形変位プロファイルを達成するために、ちょうど今説明したような複数の調整された電極電圧を使用するのではなく、変化する不均一な厚さプロファイルd(x,y)をもつ電歪層ELを使用して、線形の先端変位からの望ましくない偏りをE(x,y)=U/d=U/d(x,y)によって補償する。ここで、Eは電界を表し、Uは電圧を表し、x,yは、軸X,Yに対する回折格子の場所を表す。
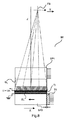
次に、図8を参照すると、これは、撮像装置のさらなる実施形態を示し、この撮像装置は、電歪層をもつ回折格子アセンブリを含み、X軸に沿った焦点の横変位を達成するように下部補強プレートSP2に作用する機械又は好ましくは電気機械平行移動ステージTSをさらに含む。代替として、単一の補強プレートの実施形態が使用される場合、平行移動ステージTSは、平行移動ステージを電歪層に適用することによってX方向に回折格子深さを横切って作用する。特に、線形平行移動ステージTSは、圧電トランスデューサとして実現される。上部プレートSP1は横変位に抗して固定され、又は、逆に、平行移動ステージTSは他の(上部)プレートSP1に作用し、下部プレートSP2は固定されたままである。下部プレートSP2のわずかな横シフトによって、回折格子の先端部分206は、X軸に沿って同じ方向に、すなわち、正方向又は負方向に全体的にシフトされる。その結果は、反対方向への焦点の横シフトである。したがって、そのようなトランスデューサTSによって、回折格子システムの焦点の位置は、X線管XRの焦点スポットの横方向位置と一致するように調整可能である。横方向トランスデューサステージは、二重又は三重焦点X線管などの多焦点X線管とともに使用するのに特に有益である。
上述のような提案した回折格子アセンブリGAiのうちの1つ又は複数を有する干渉計撮像装置IMは、一般に、それぞれの回折格子アセンブリ内の回折格子構造の合焦を推進するために専用の電圧源又は少なくとも電源接続(両方とも図2では単に「VS」として示されている)を含む。図6において上述で論じ導入した平行移動器ステージTSと組み合わされると、提案する撮像装置は、ユーザに、2次元で、すなわち、X−Z面において回折格子合焦に対して調節する可能性を提供する。焦点の位置は、Z方向において、電歪層に印加する電圧を増減することによって捜し出されるか又は調節される。焦点位置は、平行移動ステージに好適な電圧を印加し、それによって、必要なシフトを引き出すことによって、X方向に沿って、すなわち、左又は右に、独立にシフトされる。Z方向又はX方向の2つの方向のいずれかの回折格子の合焦は、外部環境要因によって引き起こされる撮像装置の幾何配置の変化に対して調節するために、較正手順を自由に繰り返すことができる。それにより、放射線シャドウイング効果を大きく排除できるので、高度の管エネルギー効率が保証される。回折格子の焦点合焦の際にユーザを支援するために、現在の回折格子整列による焦点の現在の位置に対するX線源の焦点の位置を示す好適なグラフィカルユーザインタフェース(GUI)が備えられる。ユーザは、2つの点、すなわち、X線源の焦点スポット及び回折格子の共通焦点の一致を達成するために、電歪層及び/又は平行移動ステージに印加されるべきそれぞれの電圧を変化させるのにボタン、ジョイスティック、又は別のやり方などの好適な制御手段を操作することができる。GUIの制御ソフトウェアは、撮像装置IMに関連したワークステーション(図示せず)などの汎用コンピュータ上で走る。制御ソフトウェアは、好適なインタフェース回路を介して回折格子のX合焦又はZ合焦のための1つ又は2つの電圧源と通信することができる。次いで、この構成は、撮像装置IMを調節するために以下の方法を実施する。第1のステップS1において、1つ又は2つの電圧が、回折格子GAiのうちの1つに属する焦点をX軸及び/又はZ軸に沿ってシフトさせるために受け取られる。ステップS2において、次いで、電歪層EL及び/又は平行移動ステージが、X軸又はY軸に沿った共通焦点のそれぞれのシフトを達成するために作動される。これらのステップは、管XRの焦点スポットとの一致が達成されるまで繰り返される。GA1、GA2、及び/又はGA0などの1つを超える回折格子アセンブリが撮像装置IMで使用される場合、X合焦及び/又はZ合焦のためのそれぞれの電圧が、2つ以上の回折格子アセンブリに別々に又は同時に印加される。各回折格子アセンブリGAiはそれ自体の共通焦点を有し、好ましくは、各々を管XRの焦点スポットFSと一致するように調節する。
図9を参照すると、これは、電歪層ELの動作によってリッジRGに加えられる横の力の効果をより詳細に論じている。上記のように、リッジRDが基部本体202に移行する基部部分204の剛性のために、電歪層変形の効果は、傾斜よりもむしろリッジの曲げである。しかしながら、回折格子構造材料の可撓性が十分に大きい場合、放射線シャドウイングが減少するので、光子束及び可視性効率の所望の増加が依然として達成される。しかしながら、リッジRGが、特に基部部分204と同様に、堅すぎる場合、電歪層変形に起因して加えられる力に応じたより高い反力が、回折格子−トランスデューサフォイルEL境界の歪みプロファイルの非線形をもたらし、それにより、合焦能力の劣化をもたらす。その上、好ましくない曲りプロファイルに加えて、回折格子リッジRGは直線から著しく外れる。すなわち、回折格子の有効な間隙幅が減少し、それにより、図9のクローズアップに示すように、回折格子のX線光学性能がさらに低下する。図10によるクローズアップは、高さL(=トレンチ深さD)を有する単一のリッジRGの拡大図を示す。曲りプロファイルw(z)は、Z軸に沿った関数としての変位力から計算され、ここで、z座標は、基部部分204からのリッジの長さに沿った距離の尺度であり、ここで、基部部分204は回折格子の基部基板202に付着する。図10におけるような基部本体202に堅く結合されたリッジRGの曲げ特性は、変位対力関係についてのw(L)=F×L3/(3Y×IM)と、曲りプロファイルについてのw(z)=1/2×w(L)/L3×(z2(z−3L))とによって決定され、ここで、Yはヤング率であり、IMは断面二次モーメントであり、Fは加えた力である。これらの関係w(z)、w(L)から、高い弾性1/Yでは、リッジRGのプリセット先端変位w(L)を達成するのに、小さい力Fしか必要でないことを推測することができる。曲りプロファイルでは、状況が全く異なる。曲りプロファイルは、材料の機械的性質と無関係であり、断面二次モーメントIM、したがって、バーの断面の大きさ及び形状と無関係である。それゆえに、Y及びIMの変更は、力の問題にしか影響を与えない。
図10の考察によれば、それぞれのリッジのより容易な曲げ及びそれぞれのリッジの傾斜のよりよい実行を促進するために、回折格子構造を、十分に高い弾性の材料から、すなわち、十分に小さいヤング率をもつ材料から形成することが本明細書において提案される。ここで、弾性は、量1/Y(Y=回折格子材料の弾性定数又はヤング率)によって測定される。1つの実施形態では、特にリッジ構造RGは、ベース基板202よりも高い弾性を有する。さらにより具体的には、理想的には、リッジが基部本体202に付着する基部部分204に、より高い弾性が集中する。
1つの実施形態によれば、基部部分204の局所化高弾性が、図11bに示す実施形態により達成される。以前の実施形態(図11a)と比較して、基部部分204はテーパ状され、それにより、より高い可撓性を達成するように「弱められている。」このようにして、継手領域JTが形成される。テーパ状は基部部分で若干の材料を除去することにより階段状プロファイルを形成することによって達成され、又はテーパ状領域の移行は連続的である。いずれの場合も、このように形成された継手領域JTは、より容易な曲げを促進する。曲げは、末端先端部分208で回折格子に結合された電歪層の膨張によってリッジRGに加えられたX軸に沿った横の力を介して経験する傾斜反応によく似ている。リッジRGのテーパ状区間の断面二次モーメントは減少する。したがって、回折格子リッジRGの先端を変位させるために必要な力は減少し、回折格子バーの曲げ寄与の大部分は、今では、細い継手JT領域によって引き受けられる。
別の実施形態によれば、回折格子本体の本質的に単一体の構造が放棄される。言い換えれば、図11a又は図11bのように基部部分202をシームレスにリッジRGに移行させるのではなく、1つの実施形態では、もはや単一体でない「関節型」回折格子構造を形成することが提案される。これらの関節型回折格子構造において、リッジRGは、基部本体202から分離した別々の部分を形成する。リッジは、継手構造JTを介して基部本体202に接続又は結合される。継手JTはそれ自体リッジ及び基部本体202以外の異なる材料から形成された別々の部分である。1つの実施形態では、図11cに示すように、可撓性継手JTは、基部本体202に形成された溝FRに少なくとも部分的に受け取られる接着剤などの十分に高い可撓性の充填材料として設けられる。次いで、個々のリッジRGが、基部本体202にそれぞれの継手JTを介して結合され、それにより、一緒に関節型回折格子構造を形成する。
図12a〜図12cは、関節型回折格子構造のさらなる実施形態を示す。例えば、図12aでは、溝は、鋸歯状プロファイルを有するように形成される。図12bでは、溝は、台形の断面を有するトラフのように形成される。図12cのように、溝は、基部部分202のそれぞれの表面に適用された正弦波パターンのトラフ領域として形成される。
いずれの場合も、溝FRは、充填材料、及び/又はそれぞれのリッジの基部部分206の少なくとも一部を、少なくとも部分的に又は完全に受け取るのに適している。1つの実施形態では、溝は、Y方向に(すなわち、図面の面の中に)及び回折格子基部本体202の全長に延びるが、溝が、リッジのそれぞれのセグメントを受け取るために間隙によって中断され、それにより、図7に関して前に論じたような中断したプロファイル配置の適用を実施する実施形態も想定される。溝パターンは、圧延加工、エッチング、又は別のやり方でベース基板に施される。
提案する関節型回折格子設計は、先端208の変位の間、反力の減少(又はさらに最小)及び回折格子リッジRGそれ自体の曲りの減少(最小又は無視できるほどでなくても)の達成を可能にする。さらに、関節型リッジのために、幾何学的焦点に向かって回折格子アセンブリの完全に近い若しくは真の整列又は真の合焦が達成されることが理解されよう。これは可能であるが、その理由は、今では、リッジが、傾斜され、それにより、それぞれのリッジRDの高さdに沿って平行に延びる想像線の交差点として焦点の幾何学的定義を可能にするからである。関節のおかげでこの「真の」又は完全な整列は、関節がなく、電歪層ELの動作が傾斜ではなくリッジの曲げをもたらす図9における前に説明した実施形態と対比される。この状況では、部分的な整列しかなく、焦点はポイントではなく「仮想」焦点領域へと「劣化する」。今なお、曲げによる部分的な整列の場合でさえ、リッジの傾斜によるほど明白でないが可視性の向上が依然として達成されることに留意されたい。言い換えれば、本明細書で使用する「整列」又は「合焦」は、それぞれ、部分的な及び完全な整列/合焦の両方を包含すると解釈されるべきである。
上述の実施形態では、電歪層ELは回折格子Giの一部、すなわちリッジ又はその先端を変形させることにのみ作用するが、これは限定ではない。回折格子の全体が共通の焦点/領域に向かってリッジの合焦を生じさせるように屈曲するが、これを達成するのに必要な力は、回折格子全体としてではなくリッジを単に変形させるために作用する場合よりも大きい実施形態が想定される。
次に図13を参照して、関節型回折格子構造を製造するための方法を説明する。
ステップS10において、回折格子の基部基板202に堅く結合された回折格子リッジを有する従来通り製造された回折格子Gが用意される。トレンチTRは、2つの隣接するリッジRGの間で基板202に組み込まれる。回折格子Gはシリコンベースとすることができるが、本明細書では他の材料を排除しない。
ステップS20において、トレンチは、リッジRGを幾何学的に安定化させるために幾何学的安定剤(例えば、パラフィン/ワックスタイプの材料又はマイクロバルブタイプの発泡体など)で少なくとも部分的に充填される。発泡体は、低原子番号分子(Z≦9)から形成されることが好ましい。
ステップS30において、電気機械トランスデューサフォイルELが、リッジRGの回折格子先端206に付けられる。これは、接着又は他の貼付け手順によって行うことができる。
次いで、ステップS40において、回折格子基板が、例えばエッチング又は別のやり方で除去される。
次いで、ステップS50において、回折格子支持体が、リッジ204の今や露出している元の基部部分に付けられる。したがって、回折格子支持体は、ステップS40において除去された元の基部本体202に取って代わる。回折格子支持体は、基部本体202と同じ材料(例えば、シリコン)から製作されてもよいが、これは必ずしもそうでなくてもよい。好ましくは、回折格子本体は、打抜加工、エンボシングなどによって達成される細長い凹み又は溝のついた表面を有する。次いで、接着剤などの充填材料が溝に導入された後、回折格子支持体が、リッジの露出した基部部分に押しつけられ、それに位置合わせされる。
次いで、ステップS60において、ステップS20において以前に適用された安定剤が、関節回折格子アセンブリGAに到達するために、例えば蒸発によって除去される。適切な通気チャネルを前もって回折格子システムにどこかほかの所に設ける必要がある。発泡体を除去する必要性は、所望の剛性に依存する。ステップS60を完全に省くか、又は充填材料の一部のみを除去するか、又は層が活性化電圧の印加の間先端に横の力を加えるとき真の傾斜挙動を良い近似で最良に模倣する究極の可撓性を達成するために充填材料のすべてをあえて除去することができる。
本明細書で提案するような電歪層を有する回折格子アセンブリGAiは、従来のDPCI装置のソース回折格子G0、並びに/又は干渉回折格子G1及びG2の一方若しくは両方に取って代わることが想定される。例えば、1つの実施形態では、ソース回折格子G0、位相回折格子G1、及び分析計回折格子G2の各々は、各々撮像装置の焦点スポットFSに向けて整列する電歪層を有するそれぞれの回折格子アセンブリGA1、GA2に組み込まれる。しかしながら、別の実施形態では、回折格子アセンブリとして設けられるのは2つ又は3つの回折格子のうちの1つのみであり、他の回折格子は、電歪層のない従来の回折格子である。最大の束及び可視性効率を保証するために、本明細書で提案するような電歪層ELをもつそれぞれの回折格子アセンブリGA2として設けられるのは分析計回折格子G2であることが好ましい。別の選択は、本明細書で説明するように位相回折格子G1を回折格子アセンブリGA1に配置することである。
関節型リッジ(例えば、図11〜図13による)をもつ上述の回折格子アセンブリGAiの実施形態は、上述のように、吸収材充填材料(例えば、金)がトレンチに導入された吸収材回折格子G0及びG1にとって特に有用であることが理解されよう。この理由は以下の通りである。吸収材充填材料の存在は、通常、リッジの曲げ又は傾斜を達成するのを困難にする。これに対処するために、ここでは、リッジ間の充填材料に空隙が形成されるそのような回折格子のための処理技法を利用する。言い換えれば、充填材料は、x方向において、2つの連続するリッジの間のトレンチの幅全体を占めない。これは、例えば、一つおきのリッジを除去することによって達成される。それゆえに、X方向の材料のシーケンスは、(吸収材充填材料には例として金を、及びリッジのためのウェハ材料としてシリコンを使用して)「Au−Si−Au−空気−Au−Si−Auー空気」などである。言い換えれば、残っているリッジの各々は、今では、厚くされた「Au−Si−Au」リッジを形成するために左右に金の層を有し、これら「Au−Si−Au」リッジはそれぞれの空隙によって分離される。これらの空隙のために、電歪層を介した曲げが今では可能であるが、吸収材充填材料が存在しない場合と比較してより困難である。この時この状況において、関節型リッジをもつ実施形態は、空隙の存在のために、より容易な傾斜を促進するので、特に有益である。
本発明の別の例示的な実施形態では、先の実施形態のうちの1つによる方法の方法ステップを適切なシステムで実行するように構成されたことを特徴とするコンピュータプログラム又はコンピュータプログラム要素が提供される。
それゆえに、コンピュータプログラム要素は、本発明の一実施形態の一部とすることもできるコンピュータユニットに格納される。このコンピューティングユニットは、上述の方法のステップの実行を実行するか又は誘導するように構成される。その上、それは、上述の装置の構成要素を動作させるように構成される。コンピューティングユニットは、自動的に動作する及び/又はユーザの命令を実行するように構成される。コンピュータプログラムは、データプロセッサのワーキングメモリにロードされる。したがって、データプロセッサは、本発明の方法を実行するために装備される。
本発明のこの例示的な実施形態は、最初から本発明を使用するコンピュータプログラム、及びアップデートによって既存プログラムを、本発明を使用するプログラムに変えるコンピュータプログラムの両方を包含する。
さらに続けて、コンピュータプログラム要素は、上述のような方法の例示的な実施形態の手順を遂行するためにすべての必要なステップを提供することができる。
本発明のさらなる例示的な実施形態によれば、CD−ROMなどのコンピュータ可読媒体が提示され、ここにおいて、コンピュータ可読媒体は、それに格納されたコンピュータプログラム要素を有し、コンピュータプログラム要素は前の節で説明されている。
コンピュータプログラムは、他のハードウェアと一緒に又はその一部として供給される光記憶媒体又は固体媒体などの好適な媒体(特に、必ずしもではないが、非一時的媒体)に格納及び/又は分配されてもよいが、さらに、インターネット又は他の有線若しくは無線通信システムなどを介して他の形態で分配されてもよい。
しかしながら、コンピュータプログラムは、さらに、ワールドワイドウェブのようなネットワークを介して提示されてもよく、そのようなネットワークからデータプロセッサのワーキングメモリにダウンロードされてもよい。本発明のさらなる例示的な実施形態によれば、コンピュータプログラム要素をダウンロードできるようにする媒体が提供され、そのコンピュータプログラム要素は、本発明の以前に説明した実施形態のうちの1つによる方法を実行するように構成される。
本発明の実施形態は異なる主題を参照して説明されていることに留意すべきである。特に、ある実施形態は方法タイプの請求項を参照して説明され、一方、他の実施形態はデバイスタイプの請求項を参照して説明されている。しかしながら、当業者は、上述の説明及び以下の説明から、特に断らない限り、1つのタイプの主題に属する特徴の任意の組合せに加えて、異なる主題に関連する特徴の間の任意の組合せも本出願で開示されていると考えられることが、分かるであろう。しかしながら、すべての特徴を組み合わせ、それにより、特徴の単純な和を超える相乗効果を提供することができる。
本発明が、図面及び前述の記載において詳細に説明されたが、そのような説明図及び記載は、例証又は例示であり、限定でないと見なされるべきである。本発明は、開示された実施形態に限定されない。特許請求される発明を実践する際に、図面、本開示、及び従属請求項の検討から、開示された実施形態への他の変更を当業者は理解し、達成することができる。
特許請求の範囲において、「備えている、含んでいる(comprising)」という語は、他の要素又はステップを排除せず、「1つの(a)」又は「1つの(an)」という不定冠詞は複数を排除しない。単一のプロセッサ又は他のユニットは、特許請求の範囲に列挙されるいくつかのアイテムの機能を満たすことができる。特定の方策が互いに異なる従属請求項に列挙されているという単なる事実は、これらの方策の組合せを有利に使用できないことを示していない。特許請求の範囲におけるいかなる参照符号も範囲を限定するものと解釈されるべきでない。