本実施形態のリニューアル支援システムは、建築物に設置されている既存の器具に代えて設置可能な新規の器具を選択するように構成される。すなわち、ここでのリニューアルは、既存の器具を新規の器具に交換することを意味する。本実施形態において、既存の器具は、リニューアル支援システムが計測装置から受け取る3次元の空間情報に基づいて推定される。
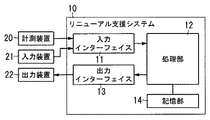
図1に示すように、リニューアル支援システム10は、入力インターフェイス11と処理部12と出力インターフェイス13とを備える。入力インターフェイス11は、計測装置20が計測した3次元の空間情報を受け取る。処理部12は、プログラムを実行するプロセッサを備える。リニューアル支援システム10は、単独のコンピュータで実現可能である。また、リニューアル支援システム10は、電気通信回線を通して端末装置と通信するサーバに構築されていてもよい。電気通信回線は、WAN(Wide Area Network)とLAN(Local Area Network)とのどちらでもよく、移動体通信網のような公衆網を含んでいてもよい。
リニューアル支援システム10がサーバに構築される場合、リニューアル支援システム10を、SaaS(Software As A Service)、あるいはPaaS(Platform As A Service)としてユーザに提供することができる。この場合、サーバのクライアントとなる端末装置を電気通信回線に接続すればリニューアル支援システム10が使用可能であるから、リニューアル支援システム10の活用の場が拡がる。また、リニューアル支援システム10がサーバに構築されていれば、複数のユーザがリニューアル支援システム10を共用することが可能である。そのため、複数のユーザそれぞれがリニューアル支援システム10を導入する場合に比べると、導入費用の増加を抑制することが可能である。
リニューアル支援システム10がサーバに構築される場合、計測装置20は端末装置に接続され、計測装置20からの3次元の空間情報は端末装置を通してサーバが受け取る。また、リニューアル支援システム10が作成した出力は端末装置が受け取る。計測装置20が接続される端末装置と、リニューアル支援システム10の出力を受け取る端末装置とは、同じ端末装置でなくてもよい。サーバは、1台のコンピュータに限らず、複数台のコンピュータで構成されていてもよい。また、サーバは、クラウドコンピューティングシステムであってもよい。
プログラムは、コンピュータに内蔵したROM(Read Only Memory)に書き込まれているほか、光学ディスク、ハードディスク装置、外部メモリ装置のようなコンピュータで読取可能な記録媒体により提供されてもよい。また、プログラムは、インターネットあるいは移動体電話網のような電気通信回線を通じてコンピュータに提供されてもよい。プロセッサがプログラムを実行するとき、プログラムは、コンピュータが備えるRAM(Random Access Memory)あるいは書換可能な不揮発性メモリに書き込まれる。
以下では、単独のコンピュータで実現されたリニューアル支援システム10を例として説明する。入力インターフェイス11には、計測装置20のほかに、ユーザが操作する入力装置21が接続される。図1では、簡略化のために計測装置20と入力装置21とを単一の入力インターフェイス11に接続しているが、実際には、計測装置20と入力装置21とは、それぞれ異なる入力インターフェイス11に接続される。出力インターフェイス13には、ユーザに情報を提示する出力装置22が接続される。入力装置21は、たとえばキーボードおよび操作デバイスを想定しており、出力装置22は、たとえばモニタ装置を想定している。モニタ装置は、液晶表示器、有機EL表示器(EL:Electroluminescence)、CRT(Cathode Ray Tube)などから選択される。操作デバイスは、マウス、トラックパッドなどを代表例とする。また、モニタ装置の画面にタッチセンサを重ねたタッチパネルを、入力装置21と出力装置22とに兼用してもよい。
ここでは、建築物はオフィスビルであり、建築物の所定の空間としてオフィスである一つの部屋の空間を想定する。器具は、照明器具を取り上げる。建築物の種類、建築物における所定の空間の種類、器具の種類は、本実施形態の適用範囲を限定する趣旨ではなく、リニューアル支援システム10を適用する一つの事例として取り上げている。たとえば、建築物は、商業施設、ホール、美術館、博物館、体育館、競技場(とくに屋内競技場)などであってもよい。リニューアルを行う空間は建築物の種類に応じた違いがあるが、複数の面に空間が囲まれていると仮定する。リニューアルの対象である器具は、照明器具に限らず、ファンコイルユニット、スプリンクラー、煙感知器などであってもよい。
計測装置20は、3次元レーザスキャナであることが望ましい。3次元レーザスキャナは、点状のスポットを物体に投影するビーム状のレーザ光を空間に放射し、物体で反射されたレーザ光を受光するように構成されている。計測装置20は、放射したレーザ光と受光したレーザ光とから物体までの距離を計測する。この種の計測装置20での距離の計測には、フェイズシフト方式、タイムオブフライト方式、三角測量方式のいずれかが主に用いられている。ここでは、フェイズシフト方式の計測装置20を想定する。フェイズシフト方式は、強度を変調したレーザ光を空間に放射し、受光したレーザ光と放射したレーザ光との位相差に相当する情報を抽出する。
計測装置20は、強度を変調したレーザ光を、複数の変調周期を含む一定時間ごとに空間に放射する。レーザ光の変調周期は既知であるから、放射したレーザ光と受光したレーザ光との位相差に基づいて、レーザ光を反射した物体までの距離が算出される。計測装置20の距離に対する測定誤差は、たとえば10[m]を測定したときの誤差が1[mm]より小さい程度であることが望ましい。
また、図2Aのように、計測装置20は、設置された面(通常は、床面)に交差する軸Ax1の周りで自転する測定部201を備えている。測定部201は、設置された面に沿った軸Ax2の周りでレーザ光を走査(スキャン)する。すなわち、測定部201が回転する面を赤道面にたとえると、測定部201は子午線上でレーザ光を走査すると言える。したがって、計測装置20がレーザ光を照射する方向は、経度に相当する角度と緯度に相当する角度との組み合わせで表される。経度に相当する角度は、計測装置20について定めた基準方向に対する角度として定められ、緯度に相当する角度は、測定部201が床面に沿った基準平面に対する角度として定められる。経度に相当する角度は、通常は水平面内での角度であり、緯度に相当する角度は通常は鉛直面(水平面に直交する面、すなわち重力方向を含む面)内での角度である。
たとえば、図2Bのように、測定部201が回転した角度(経度に相当する角度)がφであり、レーザ光を走査する角度(緯度に相当する角度)がθであるとき、計測装置20が計測した距離がλであると仮定する。図2Bのz軸は図2Aの軸Ax1に相当する。この場合、物体においてレーザ光を反射した部位P1の位置は、計測装置20に定めた極座標系(球面座標系)を用いると、(λ,θ,φ)という形式の座標値で表される。なお、図2Bでは角度θは、鉛直方向を基準にしている。角度θおよび角度φは計測装置20に設定された基準に対して計測され、距離λは上述した原理で計測される。すなわち、計測装置20は、ほぼ全周囲の空間領域について、3次元の空間情報として座標値(λ,θ,φ)を計測する。ただし、計測装置20が設置された面において計測装置20の周囲の領域は死角になるため計測の対象外である。
計測装置20の測定部201は、角度θおよび角度φそれぞれの情報を出力するエンコーダを備える。したがって、角度θおよび角度φそれぞれの分解能(単位角度)はエンコーダの分解能で決まる。角度θの単位角度がΔθ、角度φの単位角度がΔφであるとすると、計測装置20は、物体までの距離λを、角度θの単位角度Δθの間隔で計測し、角度φの単位角度Δφの間隔で計測する。
以下では、物体について座標値(λ,θ,φ)が求められた部位を「測定点」と呼ぶ。測定点は、物体の表面に投影されたレーザ光のスポットに相当する。測定点は、図2A、図2Bの部位P1に相当する。測定点は、角度θについて単位角度Δθの間隔で離散的に求められ、角度φについて単位角度Δφの間隔で離散的に求められる。なお、角度θについての単位角度Δθと角度φについての単位角度Δφとは、たとえば0.01度より小さいことが望ましい。
ところで、計測装置20において単位角度Δθおよび単位角度Δφがそれぞれ0.01度であるとすれば、計測装置20の周囲に10億個程度の測定点が得られる。このように多くの測定点が計算対象であると、処理部12での計算量が非常に大きくなるから、処理部12では、測定点の個数を減らすことが望ましい。
ここでは、計測装置20による計測対象の物体が一つの部屋である。そのため、処理部12は、たとえば、部屋の内部空間に相当する仮想空間を多数個のボクセルに分割し、所定個以上の測定点を含むボクセルを抽出する。また、処理部12は、抽出されたボクセルに含まれている測定点の座標値を用いてボクセルごとに代表の座標値を求め、求めた座標値を測定点の座標値として用いる。この処理を行えば、測定点の個数は、所定個以上の測定点を含むボクセルの個数であって、測定点の個数を低減させることが可能である。ボクセルのサイズは、測定点が複数個ずつ含まれ、かつ必要な寸法精度(たとえば、1[cm]以下の寸法精度)が得られるように定められる。なお、処理部12は、空間の全体について比較的大きいボクセルを用いた前処理を行った後、前処理で得られた結果を用いて空間の着目部分を抽出し、着目部分について比較的小さいボクセルを用いた処理を行ってもよい。
ボクセルごとの測定点の代表の座標値は、たとえば、ボクセルに含まれる測定点の重心の値である。また、処理部12は、ボクセルに含まれる測定点から座標成分ごとに中央値あるいは最頻値を求め、求めた中央値あるいは最頻値を、ボクセルごとの測定点の代表の座標値の座標成分としてもよい。これらの値は一例であり、ボクセルごとの測定点の代表の座標値は、他の値であってもよい。
上述したように、計測装置20が求めた測定点の座標値は、測定部201がレーザ光を放射する向きを表す角度θ、φと、物体までの距離λとで表された極座標系の座標値である。すなわち、計測装置20が求めた測定点は、計測装置20を基準にして原点を定めた極座標系の座標値で表されている。
対して、ボクセルの形状は、一般的には、立方体あるいは直方体である。したがって、測定点がボクセルに含まれるか否かを見分けるには、測定点が直交座標系で表され、同じ直交座標系でボクセルの範囲が表されていることが望ましい。また、部屋の形状は、部屋を囲んでいる複数の面の向きおよび寸法で表されることが多い。この点から言っても、測定点は直交座標系の座標値で表されていることが望ましい。ここに、部屋を囲んでいる複数の面とは、たとえば、床面、天井面、壁面である。
極座標系の座標値(λ,θ,φ)を、直交座標系の座標値(x,y,z)に変換するには、直交座標系に対する極座標系の並進変位と回転角度とを決めなければならない。説明を簡単にするために、ここでは、直交座標系に対して極座標系は回転しておらず、直交座標系に対する極座標系の並進変位が、(x0,y0,z0)で表されると仮定する。この条件では、以下の関係が成立する。
x−x0=λsinθcosφ
y−y0=λsinθsinφ
z−z0=λcosφ
計測装置20が計測したすべての測定点の極座標系の座標値(λ,θ,φ)は、上述した関係により直交座標系の座標値(x,y,z)に変換され、ボクセルごとに代表の座標値が求められる。なお、処理部12は、測定点を含まないボクセルを処理対象から除外する。以下では、ボクセルごとの代表の座標値で表される点を測定点として扱う。したがって、以下の説明において、測定点は、ボクセルのサイズに応じた間隔で分布する。
ところで、部屋を囲んでいる複数の面は、それぞれ平面であることが多い。また、床面と壁面、複数の壁面のうち隣り合う2つの壁面、天井面と壁面などは、それぞれがほぼ直角をなしていることが多い。ただし、床面、天井面、壁面それぞれは、段差、凹部、凸部などを備える場合がある。また、天井面は、一方向に傾斜した片流れ天井、中央部が周部よりも高い屋根形あるいはドーム形の天井などがある。ここでは、建築物の空間としてオフィスを想定しているから、典型例として、床面が平面であり、天井面が床面にほぼ平行な平面であると仮定して説明する。また、部屋の壁面は4面であって、それぞれ平面であると仮定する。
処理部12は、複数の測定点を用いて部屋の寸法を把握する機能を有している。言い換えると、処理部12は、部屋を囲んでいる複数の面それぞれに属する測定点を複数個ずつ抽出し、部屋を囲んでいる複数の面それぞれに属する複数個ずつの測定点を用いて複数の面それぞれの位置と大きさとを求める。具体的には、処理部12は、複数の測定点のうち床面、天井面、4つの壁面それぞれに対応する測定点を複数個ずつ抽出し、抽出した測定点によって床面、天井面、4つの壁面それぞれを表す数式を求め、これらの数式により床面、天井面、4つの壁面それぞれの位置と大きさとを求める。
複数個の測定点を床面、天井面、4つの壁面それぞれに対応付ける方法には、ユーザのオペレーションによる方法と、処理部12が自動的に行う方法とがある。処理部12が自動的に行う方法とは、複数の測定点から求めた面の向き、測定点の位置などの情報に基づいて、測定点のクラスタリングを行い、クラスタに分けられた測定点を床面、天井面、4つの壁面それぞれに対応付ける方法である。
一方、ユーザのオペレーションによる方法とは、部屋の画像を出力装置22に表示しておき、出力装置22に表示された画像のうち床面、天井面、4つの壁面それぞれに対応する領域を入力装置21でユーザが指定する方法である。出力装置22に表示される画像は、計測装置20が空間に放射したレーザ光の反射強度を画素値とする画像、あるいは計測装置20からのレーザ光の照射とは別に撮影したモノクロ画像またはカラー画像に測定点が対応付けられた画像である。また、画面の領域は、入力装置21を通して指定される。
床面、天井面、4つの壁面それぞれに対応する複数個ずつの測定点が求められると、床面、天井面、4つの壁面それぞれを表す数式が求められる。一般に、直交座標系において、1つの平面は、ax+by+cz+d=0という数式で表すことができる。すなわち、係数a、b、c、dの値の組み合わせで1つの平面が決まる。ただし、計測装置20が計測した測定点の座標値には誤差が含まれることがあるから、単一の平面に属すると推定される複数の測定点の座標値を上述した数式に代入したときに、すべての測定点で係数a、b、c、dの値が一致するとは限らない。数式に代入する測定点の座標値は、ボクセルごとに求められた代表の座標値であるから、誤差は低減されていると推測されるが、依然として誤差が生じる可能性がある。そのため、処理部12は、測定点に関する統計的処理を行うことにより、部屋を囲んでいる平面を表す可能性が相対的に高くなるように係数a、b、c、dの値の組み合わせを決定する。
特定の平面に属すると推定される複数の測定点を用いて特定の平面を表す数式を決める統計的処理には、複数の測定点の全体を用いる処理、複数の測定点のうちのいくつかの測定点を用いる処理などがある。複数の測定点の全体を用いる処理では、複数の測定点のうちの異常値だけを除外する場合と、複数の測定点に重みを付ける場合とがある。
複数の測定点のうち異常値だけを除外して特定の平面を表す数式を決める処理は、たとえば最小二乗法が相当する。最小二乗法では、複数の測定点に対する二乗誤差が最小になるように、係数a、b、c、dの値の組み合わせが決定される。また、複数の測定点に重みを付けて特定の平面を表す数式を決める処理は、たとえばM推定法などが相当する。この種の処理では、特定の平面として想定される平面に対する誤差を評価し、誤差が大きいほど測定点の寄与度が小さくなるように重み付けが行われる。したがって、平面を表す数式は主として誤差の小さい測定点に基づいて決められ、外れ値(アウトライヤ)に対するロバスト性が最小二乗法よりも高くなる。
複数の測定点のうちのいくつかの測定点を用いる処理では、一般的には4個以上の測定点をランダムに抽出し、抽出した測定点を用いて平面を表す数式を求める。求めた数式で表される平面に対して所定の誤差範囲を定め、誤差範囲に含まれる測定点の個数が最大になる平面が得られたときに、この平面が求める平面と推定される。あるいは、誤差範囲に含まれる測定点の個数ではなく、測定点の二乗誤差の中央値が最小になる平面が得られたときに、この平面が求める平面と推定される。
上述のように、複数の面を表す数式を求める際に、異常値あるいは外れ値を除外するから、面の数式を求める際には、面に設置された物体に相当する測定点を除外して面を表す数式を求めることが可能である。たとえば壁面にスイッチあるいはアウトレットのような配線器具が配置されている場合に、4つの壁面それぞれを表す数式を求めるための測定点から配線器具に相当する測定点を除外することが可能である。同様に、天井面に照明器具が配置されている場合に、天井面を表す数式を求めるための測定点から照明器具に相当する測定点を除外することが可能である。
処理部12は、複数の面それぞれを表す数式を求めた後、数式それぞれを、床面、天井面、4つの壁面それぞれに対応付ける。ここでは、説明を簡単にするために、床面および天井面がxy平面に平行であり、4つの壁面がxz平面またはyz平面に平行であるように直交座標系が定められていると仮定する。このように仮定した条件下では、床面と天井面とを表す数式は、いずれも変数zを含まない形式であり、複数の壁面それぞれを表す数式は、変数xと変数yとのいずれかを含まない形式である。また、天井面は床面よりも高いから、z軸方向の上向きを正の向きとすれば、変数zを含んでいない数式のうち、係数dの大きいほうが天井面に対応していると言える。同様にして、直交座標系での壁面の位置も特定される。
床面、天井面、4つの壁面それぞれを表す数式が決まると、処理部12は、隣り合う2面が交わる交線を求め、互いに交わる2本の交線の交点を求めることにより、床面、天井面、4つの壁面の範囲を確定する。なお、ここでは、単純化のために、部屋が6つの面で囲まれ、かつ隣り合う面が互いに直交していると仮定したが、実際の部屋では、このような仮定が成立しないことがある。ただし、このような仮定が成立しないときでも、個々の面を表す数式を求めることが可能である。また、面を表す数式が求められると、数式を実空間の面に対応付けることができ、面の範囲を確定することが可能である。
本実施形態のリニューアル支援システム10は、既存の照明器具に代えて新規な照明器具に交換することを想定しているから、処理部12は、部屋を囲む6つの面の範囲を確定した後に、既存の照明器具を特定する処理を行う。照明器具は壁面あるいは床面に設置されることもあるが、ここでは、多数個の照明器具が天井面に配列されている場合を例として説明する。すなわち、既存の照明器具が設置されている対象面が天井面である場合について説明する。天井面は、上述のように測定点の座標値および数式により特定される。
ここに、オフィスの天井面に設置される照明器具では、天井面への投影形状が四角形状または円形状であることが多い。また、この種の照明器具を天井面に設置する形態には、少なくとも一部分が天井面に埋め込まれる埋込型と、照明器具の全体が天井面から露出する露出型とが多い。なお、本実施形態では、天井面の全体が発光面である照明器具、および発光面が天井面と面一である照明器具は対象にしない。
計測装置20から得た情報のうち、照明器具を特定するために処理部12で利用できる情報は、測定点の座標値と部屋の画像情報とであり、処理部12は、これらの情報を用いると、照明器具の形状および寸法を抽出することが可能である。照明器具の形状および寸法を抽出するために、処理部12は、測定点のうち照明器具に対応する範囲の測定点を取り出す処理を行う。この処理には、天井面に設置される照明器具が、天井面より下方に位置する部分と天井面より上方に位置する部分との少なくとも一方を備えるという経験則が適用される。処理部12は、4つの壁面に囲まれた空間内で、天井面に対して上と下とに所定距離の範囲内で天井面から離れているボクセルに対応した測定点を、天井面に設置された物体に対応する測定点として抽出する。一例として、所定距離は、20[cm]から50[cm]程度であればよい。
ここでは、天井面がxy平面に平行と仮定しているから、処理部12は、測定点のz座標の値を用いて、天井面において照明器具に対応する可能性が高い測定点を抽出することが可能である。たとえば、天井面を表す数式の係数dと、z座標の値との差が2[mm]より大きい測定点が、照明器具に相当する可能性の高い測定点として抽出される。天井面に照明器具が設置されていれば、係数dとz座標の値との差が2[mm]より大きいという条件を満足する測定点が多数存在することが考えられる。そこで、処理部12は、条件を満足する複数の測定点のうち、xy平面に沿った距離がボクセルのサイズ程度に隣接している測定点をひとまとめにして測定点の集合を作る。ひとまとまりになった測定点の集合は、照明器具に対応している可能性がある。また、天井面に複数の照明器具が設置されていれば、ひとまとまりになった測定点の集合は複数作られる。
ところで、天井面に設置されている既存の照明器具は、過去に製造された複数種類の照明器具のいずれかである可能性が高い。過去に製造された照明器具(以下、「製品」という)については、品番に対して、形状、寸法、配光特性などの仕様が既知である。製品についての既知の情報は、インターネットのような電気通信回線に接続されたサーバから取得することが可能である。また、リニューアル支援システム10が、製品についての既知の情報を格納する記憶部14を備えていてもよい。処理部12は、上述した条件を満足する測定点を、製品の形状と寸法とに照らし合わせるパターンマッチングを行う。具体的には、上述した条件を満足するひとまとまりの測定点の集合を、複数種類の製品それぞれに照らし合わせて、誤差の評価を行い、誤差が小さい製品を既存の照明器具の候補とする。
ここで、3次元の座標値を用いて誤差の評価を行うと処理部12の処理負荷が大きくなるから、処理部12は、測定点を適宜の投影面に投影した状態で、製品の形状と照合することが望ましい。たとえば、処理部12は、上述した条件を満足する測定点の集合を天井面に投影した状態で、製品の形状を表す図面と照合し、測定点の集合と製品の形状との誤差の程度を評価する。
製品の形状を表す図面は、天井面に投影された測定点の集合と照合されるから、照明器具を天井面に投影した状態の形状を表す下面図が望ましい。また、誤差は、たとえば、製品の形状を表す図面において製品の領域内に測定点の集合を重ね合わせたときに相互に重ならない部分の割合が用いられる。誤差の評価には、相互に重ならない部分の割合について基準値との比較を行い、誤差が基準値より小さい場合に、条件を満足しているとみなせばよい。基準値は、たとえば5%に設定される。条件を満足した製品は、既存の照明器具である可能性が高いから、処理部12は、条件を満足した製品を既存の照明器具の候補とする。
測定点の座標値は天井面の下方に設置された計測装置20が計測した情報に基づいているから、人が天井面を下方から見たときに認知する情報に相当している。そのため、測定点の集合を天井面に投影することは容易であるが、天井面に交差する一つの面に投影することは必ずしも容易ではない。たとえば、ダウンライトのように埋込型の照明器具では、ランプが取り付けられている状態で、測定点の分布から反射板の内側の形状を把握することは必ずしも容易ではない。ただし、露出型の照明器具であれば、天井面から露出している部分について、照明器具に対応する測定点の集合を、天井面に直交する一つの面に投影することは容易である。したがって、露出型の照明器具については、天井面だけではなく他の面に投影した状態で製品の図面と照合することが可能である。
測定点の集合を製品の図面と照合することによって、既存の照明器具の候補が得られるが、候補が一意に定まるとは限らない。すなわち、測定点の集合を製品の図面に照合したときに、既存の照明器具について複数の候補が抽出されることがある。これは、天井面に投影した情報をのみを用いた場合に、反射板の形状、ランプの消費電力(ワット数)などの情報が考慮されないからである。また、反射板の形状、ランプの消費電力などは同じでも、製品のマイナーチェンジなどにより機能が異なることがあり、既存の照明器具には、形状および寸法が同じである複数種類の製品が存在する場合がある。
そのため、既存の照明器具を特定するために、処理部12は、測定点を天井面に投影した状態で得られる情報以外の補足情報を組み合わせて既存の照明器具を特定することが望ましい。補足情報としては、照明器具に対応する範囲の測定点におけるz座標の値、ランプの消費電力、照明器具に点灯状態を指示する操作装置の仕様、照明器具の直下で計測した照度、照度の分布から得られる配光特性などがある。
ここに、補足情報は入力装置21と出力装置22とを用いて対話的に入力される。たとえば、処理部12は、既存の照明器具の候補を測定点の座標値に基づいて求めると、既存の照明器具の候補となる製品の画像を出力装置22の画面に表示し、補足情報の入力を促すウインドウを開いて入力装置21からの入力を待ち受ける。ウインドウは、ランプの消費電力、操作装置の仕様、照度などの補足情報の入力を受け付けるように画面が構成されている。
この状態で、ユーザが認識している範囲の補足情報をウインドウから入力すれば、処理部12は補足情報を受け取って既存の照明器具の候補を絞り込む処理を行う。ここに、操作装置の仕様とは、点灯と消灯のみを行う構成、調光が可能な構成、調色が可能な構成などを意味する。出力装置22の画面には、既存の照明器具の候補となる製品の画像が表示されるから、候補として複数の製品が表示されている場合に、ユーザが目視で得た情報に基づいて、既存の照明器具の候補を絞り込んでもよい。
既存の照明器具に対応する製品をユーザが確認した後に、ユーザが入力装置21を用いて確定の操作を行うと、処理部12は、測定点から求めた既存の照明器具の位置に、確定した製品を対応付ける。なお、部屋の設計図があり、設計図に既存の照明器具を特定する情報が記入されている場合には、この情報を補足情報に用いると、より精度よく既存の照明器具に対応する製品を確定することが可能である。既存の照明器具に対応する製品が確定すると、製品は品番で特定される。
ここでは、天井面に複数の照明器具が配置されている場合を想定しているから、複数の既存の照明器具それぞれに、確定した製品を対応付ける必要がある。天井面に配置された複数の既存の照明器具それぞれに、確定した製品を対応付ける際には、処理部12は、出力装置22の画面に天井面の図面を表示し、既存の複数の照明器具が配置されているそれぞれの場所を表示する。
天井面の範囲は測定点の座標値と数式とに基づいて確定されている。そのため、処理部12は、天井面の寸法および形状の情報を用いることにより、出力装置22の画面に天井面の図面を表示する。また、複数の既存の照明器具をそれぞれ天井面に投影した形状(仕様の情報)と、複数の既存の照明器具の位置(配置の情報)とが確定しているから、処理部12は、これらの情報に基づいて、天井面の図面に複数の既存の照明器具を配置した図面を作成する。要するに、処理部12は、既存の照明器具の仕様の情報および配置の情報に基づいて、既存の照明器具を対象面である天井面に配置する。
複数の照明器具に同製品を対応付ける場合は、既存の照明器具に対応する場所をまとめて指定し、指定された既存の照明器具に対応付ける製品を、入力装置21から指示してもよい。既存の照明器具に対応する場所をまとめて指定するには、たとえば、キーボードの「Ctrl」キーを押しながら、複数の照明器具それぞれに対応する領域にポインタを移動させ、マウスのクリックに相当する操作を行えばよい。天井面に配置された複数の照明器具に、複数種類の製品が混在している場合は、既存の照明器具に対応する場所を、製品ごとにまとめて指定し、製品ごとに既存の照明器具への対応付けを行うようにしてもよい。
既存の照明器具に対応する製品が確定すると、既存の照明器具に対応するひとまとまりの測定点の集合の範囲が確定し、製品の仕様も確定する。このように、計測装置20が計測した空間情報に基づいて、既存の照明器具の配置および仕様の情報が抽出される。
処理部12は、既存の照明器具の配置および仕様の情報を抽出した後、既存の照明器具に代えて設置可能である新規の照明器具を選ぶ処理を行う。既存の照明器具の仕様によって既存の照明器具の用途が決まると、既存の照明器具に代えて設置する新規の照明器具の候補を挙げることが可能になる。実際には、リニューアル支援システム10は、既存の照明器具に代えて設置できる新規の照明器具をあらかじめ登録した記憶部14を備えている。記憶部14では、既存の照明器具に代えて設置できる新規の照明器具が製品の品番によって対応付けられている。
処理部12は、既存の照明器具の配置および仕様の情報を抽出すると、記憶部14に登録されている情報を用い、既存の照明器具に対応する製品に代えて設置できる新規の照明器具の候補を選択する。処理部12は、新規の照明器具の候補を選択すると、新規の照明器具の候補である製品の品番に基づいて少なくとも仕様の情報を抽出する。抽出された製品の仕様の情報は、出力インターフェイス13を介して出力装置22に出力される。出力装置22に出力される情報は、新規の照明器具の仕様だけではなく、設計図、外観写真または外観図、特徴の説明文などから選択される情報を含んでいてもよい。
既存の照明器具の仕様によっては、新規の照明器具について1種類の候補しか選択できない場合があるが、記憶部14には、原則として過去に製造された製品に代えて用いることができる新規の照明器具について複数種類の候補が登録される。たとえば、既存の照明器具が点灯と消灯のみを行う製品である場合、新規の照明器具として、既存の照明器具と同寸法の製品であっても、点灯と消灯のみを行う製品、調光の機能を有する製品、調色の機能を有する製品が記憶部14に登録される場合がある。また、新規の照明器具として、既存の照明器具とは配光特性が異なる照明器具、あるいは既存の照明器具とは光出力が異なる照明器具などが、記憶部14に登録される場合がある。
ここに、配光特性と光出力とは、照明器具が備える要素の種類および特性により調節される。要素の種類は、ランプ、反射板、ルーバ、透光性カバーなどであり、照明器具は、ルーバ、透光性カバーなどを備える場合と備えない場合とがある。また、要素の特性は、ランプの種類(発光原理、形状、消費電力を含む)、反射板およびルーバであれば形状と反射率、透光性カバーについては形状と透過率などを意味する。既存の照明器具に対して配光特性と光出力との少なくとも一方が異なる照明器具であれば、既存の照明器具とは異なる場所に新規の照明器具を設置できることもある。
処理部12が新規の照明器具について複数の候補を選択した場合、処理部12は、新規の照明器具の品番に基づいて仕様の情報を抽出するだけでなく、外観写真または外観図を合わせて抽出することが望ましい。これらの情報が、出力インターフェイス13を介して出力装置22に出力されると、ユーザは出力装置22の画面に表示された外観写真または外観図を確認することにより、複数の候補からユーザの希望する照明器具を選択することが可能である。
既存の照明器具に代わる新規の照明器具の候補を選択するときには、既存の照明器具の劣化に伴う照明器具の交換を目的とするだけではなく、種々の条件が付加されることがある。付加される条件としては、消費電力の低減、光出力の向上、配光の変更、調光あるいは調色のような機能の付加、外観の変更、配置の変更、費用の制約などがある。
消費電力の低減、あるいは光出力の向上を実現する条件として、新規の照明器具には、既存の照明器具に比べて効率が高いことが要求される。また、機能の付加を実現する条件として、新規の照明器具には、既存の照明器具に比べて機能が多いことが要求される。費用の制約を条件とする場合、新規の照明器具として、たとえば既存の照明器具と効率および機能が同等以上である照明器具のうち初期費用が最小である照明器具が選択される。ここでの初期費用は、新規の照明器具を設置する場合の機材に要する費用と施工に要する費用とを含む。
そのため、処理部12は、新規の照明器具を複数の候補から選択する条件として、以下の3つの条件の群からいずれかを受け付けるように構成されている。3つの条件は、既存の照明器具に比べて効率が高いという条件と、既存の照明器具に比べて機能が多いという条件と、既存の照明器具と効率および機能が同等以上である照明器具のうち初期費用が最小という条件とである。
新規の照明器具を選択する条件に、配光の変更、外観の変更、配置の変更などが含まれる場合には、ユーザ(施主)の目的および意図を反映させる必要がある。そのため、リニューアル支援システム10は、検索条件を受け付けて、新規の照明器具を絞り込む機能を有している。ただし、この機能は、条件に見合う照明器具を抽出するためのデータベースシステムとしての機能である。
処理部12は、出力装置22の画面に天井面の図面を表示した状態で、複数の既存の照明器具それぞれを、選択した新規の照明器具に置き換える。複数の既存の照明器具の配置の変更を行わない場合、処理部12は、複数の既存の照明器具それぞれを新規の照明器具に置き換えるだけである。
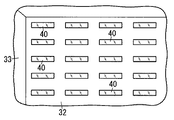
ところで、天井面と同様に、処理部12は、床面と4つの壁面とについても配置および寸法を求めているから、部屋の3次元形状の情報を保有している。また、処理部12は、既存の照明器具と新規の照明器具とについて、仕様および配置の情報を保有している。処理部12は、これらの情報を用いて、複数の既存の照明器具および複数の新規の照明器具それぞれを配置した状態について、図3のような天井伏図、図4のような立体図などの図面の情報を作成する機能を有している。また、処理部12は、図面に含まれる複数の照明器具それぞれに照明器具の仕様を対応付ける機能を有している。図3には天井面32における照明器具40の配置例を示しており、図4には床面31と天井面32と壁面33との関係および天井面32における照明器具40の配置例を示している。
リニューアル支援システム10は、計測装置20から受け取った空間情報に基づいて、部屋を囲んでいる面を抽出する機能と、複数の既存の照明器具の仕様および配置を特定する機能とを有する。また、リニューアル支援システム10は、複数の既存の照明器具に代えることができる複数の新規の照明器具の仕様および配置を決める機能を有する。さらに、リニューアル支援システム10は、図面の情報を作成する機能を有する。
図面の情報には、床面、天井面、4つの壁面それぞれの配置および寸法のほか、反射率などの情報も含んでいることが望ましい。反射率は面の汚れにより経年で変化し、オフィスには什器の反射の影響もある。そのため、一般的なオフィスでは、床面の反射率は10%、天井面の反射率は70%、壁面の反射率は50%などの値が用いられる。また、反射率は、面の材質または仕上げに応じて異なるから、材質または仕上げに考慮する必要があれば、面の材質または仕上げに応じた標準的な値を用いることができる。
ところで、リニューアル支援システム10が作成した情報を用いると、部屋の光環境のシミュレーションが可能である。光環境のシミュレーションは、既存のシミュレータで行うことが可能である。既存のシミュレータは、パーソナルコンピュータのようなコンピュータで動作するプログラムにより実現されてもよい。たとえば、ドイツのDIAL社が開発した照明設計アプリケーションプログラムであるDIALux(登録商標)を実行すれば、光環境のシミュレータを実現することができる。ただし、リニューアル支援システム10が光環境のシミュレーションを行うように構成されていてもよい。光環境のシミュレーションを既存のシミュレータで行う場合には、リニューアル支援システム10の処理部12は、シミュレータに対して出力インターフェイス13を通してシミュレーション用の情報を出力する。シミュレーション用の情報は、照明器具の仕様および配置の情報と、部屋の形状および寸法と、光環境に関連する部屋の属性(とくに、面の反射率)とを含むことが望ましい。
既存のシミュレータが光環境のシミュレーションを行ったときには、シミュレーションの結果は既存のシミュレータの構成に応じた装置の画面に表示される。シミュレーションの結果を表示する装置は、既存のシミュレータに付属するモニタ装置、リニューアル支援システム10の出力装置22、シミュレータと通信可能な端末装置に付属するモニタ装置などから選択される。また、リニューアル支援システム10が光環境のシミュレーションを行ったときには、シミュレーションにより得られた画像情報は、出力装置22の画面に表示される。シミュレーションでの画像情報は、たとえば照明器具を点灯させた状態での部屋内の照度分布を、画面に表示される部屋の画像に重ねて表示するための情報である。光環境のシミュレーションを、既存のシミュレータが行うか、リニューアル支援システム10が行うかにかわらず、既存の照明器具と新規の照明器具との双方について光環境のシミュレーションを行うことが望ましい。既存の照明器具と新規の照明器具との双方の光環境のシミュレーションの結果が得られると、ユーザは現状の光環境と新規の光環境とを視覚的に比較することが可能である。
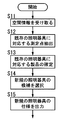
以上説明したリニューアル支援システム10の動作を図5にまとめて簡単に説明する。リニューアル支援システム10が採用しているリニューアル支援方法では、建築物の所定の空間に関する3次元の空間情報を入力インターフェイス11が計測装置20から受け取る(S11)。次に、処理部12は、入力インターフェイス11が受け取った3次元の空間情報に基づいて、所定の空間に設置されている既存の照明器具について、仕様の情報および配置の情報を抽出する(S12、S13)。ステップS12では、処理部12は、測定点を用いて既存の照明器具に対応する測定点の集合を抽出する。また、ステップS13では、処理部12は、既存の照明器具に対応する測定点の集合に対して過去の製品の情報を用いて、既存の照明器具に対応する製品を確定する。その後、処理部12は、既存の照明器具に代えて所定の空間に設置可能である新規の照明器具を、複数の候補の照明器具から選択する(S14)。既存の照明器具に代えて設置する新規の照明器具を選択する際には、入力インターフェイス11を通して得られる条件を付加し、選択する照明器具を絞り込むことができる。新規の照明器具が選択されると、処理部12は、出力インターフェイス13を通して新規の照明器具に関して少なくとも仕様の情報を出力する(S15)。
リニューアル支援システム10の処理部12は、新規の照明器具を用いた場合の電気料金を求める機能を有していてもよい。新規の照明器具を用いた場合の電気料金を求めるために、既存の照明器具の使用状況の情報と、電気料金の単価の情報とが必要である。そのため、入力インターフェイス11は、既存の照明器具の点灯時間と、電気料金の単価とを入力装置21から受け取る。電気料金の単価が一定であるならば、照明器具の点灯時間は時間の長さの情報があればよい。一方、電気料金の単価が時間帯などの条件で変化するならば、照明器具の点灯時間は時間の長さだけではなく、点灯を開始した時刻と消灯した時刻との情報を含んでいることが望ましい。
既存の照明器具の電気料金は、これらの情報を用いることにより計算される。点灯時間は、必ずしも正確でなくてもよく、照明器具のおおよその使用状況がわかればよい。点灯時間を精度よく計測する必要があれば、電流センサを用いて照明器具に電力を供給する電路を通過する電流を計測し、計測結果を記録すればよい。
既存の照明器具の点灯時間がわかれば、処理部12は、新規の照明器具を既存の照明器具と同様に点灯させた場合の電気料金を計算することが可能である。電気料金の単価が時間帯に応じて変化するときには、処理部12は、既存の照明器具の点灯を開始した時刻と消灯した時刻とを、新規の照明器具に当て嵌めることによって、電気料金を計算する。電気料金の計算は1ヶ月間、6ヶ月間、1年間などの所定期間について計算される。計算結果は出力インターフェイス13を通して出力装置22の画面に表示される。
新規の照明器具を使用した場合の電気料金は、新規の照明器具を決めた後に計算することが可能である。一方、新規の照明器具の候補を選択するときに、選択の条件に用いるために新規の照明器具を使用した場合の電気料金を計算してもよい。
上述したリニューアル支援システム10は対象面が天井面であるが、対象面は天井面ではなく、床面あるいは壁面であってもよい。部屋を囲んでいる面において、ひとまとまりの測定点の集合が照明器具に対応していると推定される場合、照明器具に対応すると推定される測定点の集合が存在する面を対象面として、上述した処理を行うことが可能である。すなわち、既存の照明器具が設置されている対象面を特定し、対象面における既存の照明器具の配置および仕様を抽出することが可能である。
また、上述したリニューアル支援システム10は、照明器具の範囲に対応する測定点を取り出すために、処理部12が、天井面に対して所定距離の範囲内で天井面から離れた測定点を抽出している。照明器具の範囲に対応する測定点を取り出す方法として、処理部12は、天井面に対して所定距離の範囲内のボクセルに対応した測定点のz座標を用いた微分を行ってもよい。たとえば、処理部12は、z座標が比較的大きく変化する測定点のうち、天井面の測定点に隣接している測定点を、照明器具の縁に対応する測定点の候補として抽出すればよい。
具体的には、処理部12は、隣接する複数個の測定点のz座標に基づいて勾配の大きさ(微分値に相当)を計算し、勾配の大きさを適宜の閾値で、勾配が比較的小さい領域と勾配が比較的大きい領域とに分離する。2つの領域のうち勾配が比較的大きい領域には、照明器具の縁に対応する測定点が含まれていると推定されるから、たとえば、勾配が比較的大きい領域を、過去の製品の外形に重ね合わせて誤差の程度を評価すれば、照明器具に対応する領域が抽出される。
上述したリニューアル支援システム10の動作は、複数の照明器具が配置されている空間に適用したときの動作であるが、リニューアル支援システム10は、1個の照明器具が配置された空間に適用することもできる。1個の照明器具が配置された空間であっても、計測装置20が計測した3次元の空間情報に基づいて既存の照明器具の製品を推定し、新規の照明器具の候補を選択することが可能である。
計測装置20は、3次元レーザスキャナに代えて、ステレオ画像法により3次元の空間情報を計測する装置であってもよい。また、3次元空間を撮影した2次元の画像と、3次元空間を撮影したカメラのレンズ(焦点距離)の情報と、3次元空間におけるカメラの位置情報とがあれば、カメラの視野に基づいて、3次元の空間情報を求めることが可能である。したがって、3次元空間を2次元に投影するカメラを計測装置20に用いることも可能である。リニューアル支援システム10は、計測装置20から受け取った空間情報に基づいて光環境のシミュレーションに用いる情報を作成するから、3次元の空間情報の寸法精度は高いほうが望ましい。ただし、簡易なシミュレーションであれば、カメラで撮影した画像から抽出された3次元の空間情報であっても、上述した処理は可能である。
上述した本実施形態に係るリニューアル支援システム10は、入力インターフェイス11と、処理部12と、出力インターフェイス13とを備える。入力インターフェイス11は、建築物の所定の空間に関して計測装置20から3次元の空間情報を受け取る。処理部12は、所定の空間に設置されている既存の器具(照明器具40)について、空間情報に基づいて仕様の情報および配置の情報を抽出し、既存の器具に代えて所定の空間に設置できる新規の器具を、複数の候補の器具から選択する。出力インターフェイス13は、新規の器具について、少なくとも仕様の情報を出力する。
本実施形態に係るリニューアル支援方法は、以下のステップを有する。すなわち、第1のステップは、建築物の所定の空間に関して計測装置20から3次元の空間情報を受け取るステップである。第2のステップは、所定の空間に設置されている既存の器具(照明器具40)について、空間情報に基づいて仕様の情報および配置の情報を抽出するステップである。第3のステップは、既存の器具に代えて所定の空間に設置できる新規の器具を、複数の候補の器具から選択するステップである。第4のステップは、新規の器具について、少なくとも仕様の情報を出力するステップである。
本実施形態に係るプログラムは、コンピュータを、上述したリニューアル支援システム10として機能させるためのプログラム、あるいはコンピュータに、上述したリニューアル支援方法を実行させるためのプログラムである。
すなわち、計測装置20が計測した3次元の空間情報に基づいて既存の器具の仕様の情報および配置の情報を抽出するから、既存の器具が未知であっても既存の器具に代えて用いることができる新規の器具を選択することが可能になる。
本実施形態に係るリニューアル支援システム10において、処理部12は、空間情報に基づいて所定の空間(たとえば、部屋)を囲んでいる複数の面(床面31、天井面32、壁面33)を抽出する。さらに、処理部12は、複数の面のうち既存の器具(照明器具40)が設置されている対象面(たとえば、天井面32)における既存の器具の位置を、既存の器具についての配置の情報として抽出する。
このリニューアル支援システム10は、計測装置20が計測した空間情報に基づいて、既存の器具の配置の情報として対象面における既存の器具の位置を抽出している。そのため、所定の空間を囲んでいる面を抽出するために、計測装置20で計測した空間情報を基に、既存の器具の配置の情報も求めることができる。
処理部12は、対象面(たとえば、天井面32)における既存の器具(照明器具40)の位置と空間情報とを用いて既存の器具の形状を推定し、推定した器具の形状に基づいて、既存の器具についての仕様の情報を抽出することが望ましい。
すなわち、計測装置20が計測した空間情報から推定した既存の器具の形状に基づいて既存の器具の仕様の情報を抽出するから、空間情報だけで既存の器具の仕様を絞り込むことができる。
計測装置20は、複数の面のうち少なくとも対象面について多数の測定点それぞれの3次元の座標値を求めるように構成されていることが望ましい。この場合、処理部12は、多数の測定点のうちひとまとまりになった測定点の集合を、過去に製造された器具(照明器具40)の複数種類の製品それぞれに照らし合わせて誤差の程度を評価し、誤差が基準値より小さい製品を既存の器具の候補としてもよい。
すなわち、多数の測定点のうち器具の条件を満たしている測定点の集合を抽出し、このような測定点の集合を、過去に製造された器具の製品と重ね合わせて誤差を評価することによって、誤差の小さい製品を既存の器具の候補として抽出することができる。したがって、計測装置20による計測で得られた測定点の座標値に基づいて、既存の器具を推定可能である。
処理部12は、新規の器具(照明器具40)を、複数の候補の器具から選択する条件として、以下の複数の条件の群からいずれかを受け付けることが望ましい。条件の群は、既存の器具に比べて効率が高いという条件と、既存の器具に比べて機能が多いという条件と、既存の器具と効率および機能が同等以上である器具のうち初期費用が最小という条件との群であることが望ましい。
すなわち、既存の器具に代えて設置する新規の器具を選択する条件を複数の条件から選択するから、ユーザ(施主)によるリニューアルの目的に応じて、新規の器具を選択することが可能である。また、新規の器具の選択肢が非常に多い場合に、条件に応じた絞り込みが可能である。
既存の器具および新規の器具は照明器具40であることが望ましい。
すなわち、照明器具40は製品の種類が多く、空間に作り出される光環境は、選択した製品の種類によって異なるから、既存の照明器具40に代えて設置する新規の照明器具40の選択を支援することは有用である。
処理部12は、所定の空間において新規の照明器具40が設置された状態の光環境のシミュレーションを行い、シミュレーションで得られた画像情報を、出力インターフェイス13を通して出力することが望ましい。
すなわち、新規の照明器具40による光環境のシミュレーションを行うことにより、光環境の設計者あるいはユーザ(施主)に対して、新規の照明器具40を採用するか否かの意思決定を支援することができる。
処理部12は、光環境のシミュレーションを行うシミュレータに出力インターフェイス13を通してシミュレーション用の情報を出力するように構成されることが望ましい。シミュレーション用の情報は、計測装置20が計測した空間情報と、新規の照明器具40について所定の空間での位置の情報と、新規の照明器具40について配光特性の情報を含んだ仕様の情報とを有することが望ましい。また、所定の空間において、新規の照明器具40が設置された状態の光環境のシミュレーションをシミュレータに行わせることが望ましい。
すなわち、リニューアル支援システム10が、照明器具40による光環境のシミュレーション用の情報を出力するから、シミュレータを用いた光環境のシミュレーションが可能である。したがって、リニューアル支援システム10は、光環境のシミュレーションを行うシミュレータに対する情報を作成するだけでよいから、処理能力が比較的低いコンピュータで実現することが可能である。
入力インターフェイス11は、所定の空間における既存の照明器具40の点灯時間と、電気料金の単価とを受け取るように構成されていてもよい。この場合、処理部12は、点灯時間と電気料金の単価とを用いて、所定期間における新規の照明器具40の電気料金を計算し、出力インターフェイス13を通して計算結果を出力することが望ましい。
すなわち、既存の照明器具40の使用状況を新規の照明器具40に適用した場合の電気料金が出力されるから、新規の照明器具40を採用した場合の運転費用を知ることができる。
以上説明した実施形態は、本発明の様々な実施形態の一部に過ぎない。また、上述した実施形態は、本発明の目的を達成できれば、設計等に応じて種々の変更が可能である。