JP2018024483A - Elevator - Google Patents
Elevator Download PDFInfo
- Publication number
- JP2018024483A JP2018024483A JP2016155183A JP2016155183A JP2018024483A JP 2018024483 A JP2018024483 A JP 2018024483A JP 2016155183 A JP2016155183 A JP 2016155183A JP 2016155183 A JP2016155183 A JP 2016155183A JP 2018024483 A JP2018024483 A JP 2018024483A
- Authority
- JP
- Japan
- Prior art keywords
- brake
- elevator
- torque
- car
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/02—Cages, i.e. cars
- B66B11/026—Attenuation system for shocks, vibrations, imbalance, e.g. passengers on the same side
- B66B11/028—Active systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
- B66B1/304—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor with starting torque control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/36—Means for stopping the cars, cages, or skips at predetermined levels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Civil Engineering (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Elevator Control (AREA)
Abstract
Description
本発明はエレベーターに関する。 The present invention relates to an elevator.
エレベーターのかごを移動させる際には,通常かごとカウンタウエイトの差分にあたるトルクを補償トルクとしてモータから出力することで,ブレーキにより停止している状態からブレーキを離した状態に移行した時でも,かごが落下することなく静止した状態を維持できるように制御されている。この起動時の補償トルクを決めるためには,かご内の重量を検出する必要があり,かご下やシンブルロッドなどに秤センサを取り付けることで,かご内の重量を検出できるようにしている。この秤センサに誤差が生じると,必要な補償トルクの分を正しく出力することができなくなるため,出発時に誤差に応じた振動が発生する。これを解決する方法として,たとえば特許文献1にあるような秤センサの校正方法が開示されている。 When moving the elevator car, the torque corresponding to the difference between the normal car and the counterweight is output from the motor as a compensation torque, so that even when the car is shifted from a state where it is stopped by the brake to a state where the brake is released, Is controlled so that it can remain stationary without falling. In order to determine the compensation torque at the time of starting, it is necessary to detect the weight in the car, and the weight in the car can be detected by attaching a weighing sensor to the bottom of the car or the thimble rod. If an error occurs in the scale sensor, the necessary compensation torque cannot be output correctly, and vibrations corresponding to the error occur at the time of departure. As a method for solving this, for example, a calibration method of a scale sensor as disclosed in Patent Document 1 is disclosed.
しかしながら、特許文献1に開示された技術をはじめ、秤センサ自体が故障した場合やそもそもの精度が期待できない場合,正しい補償トルクを与えることができず,出発時に振動が発生してしまう。 However, including the technique disclosed in Patent Document 1, if the scale sensor itself fails or the accuracy cannot be expected, correct compensation torque cannot be applied and vibration occurs at the time of departure.
上記課題を解決するため、本発明は、かごと、接続される回転体を回転させることでかごを移動させる駆動装置と、回転体に制動力を与えるブレーキと、かごの運転を制御するエレベーター制御部と、エレベーター制御部からエレベーターの出発信号を受信した場合、ブレーキのブレーキトルクを段階的に変化させて解放するブレーキ制御部と、エレベーター制御部からエレベーターの出発信号を受信した場合、かごの速度を零に近づけるように駆動装置のトルクを制御するトルク制御部と、を備えることを特徴とするエレベーターを提供する。 In order to solve the above-described problems, the present invention provides a car, a driving device that moves a car by rotating a connected rotating body, a brake that applies a braking force to the rotating body, and an elevator control that controls the operation of the car. When the elevator departure signal is received from the elevator control unit, the brake control unit that releases the brake by changing the brake torque stepwise, and when the elevator departure signal is received from the elevator control unit, the car speed And a torque control unit that controls the torque of the driving device so as to be close to zero.
本発明の目的は,出発時のかごの振動を低減することにある。 An object of the present invention is to reduce the vibration of a car at departure.
以下,図面を参照して,一実施の形態について詳細を説明する。 Hereinafter, an embodiment will be described in detail with reference to the drawings.
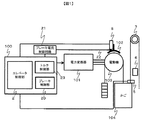
図1は,本発明におけるエレベーターシステムを示す全体構成図であり,エレベーターのかご104の移動は,エレベーターコントローラ100によって制御される。エレベーターコントローラ100は,エレベーターの運行制御を行うエレベーター制御部2の他に,ブレーキ制御部20,トルク制御部23を備えている。
FIG. 1 is an overall configuration diagram showing an elevator system according to the present invention, and the movement of an
かご104は,建屋に形成された昇降路内を複数の階床間に渡って移動し,ロープを介してつり合い重りと呼ばれるかご104とバランスを取るためのおもりに接続されている。かご104には,乗り場側扉を係合して開閉する乗りかご側扉が設けられている。かご104の移動は,電動機103によって綱車が駆動されることにより行われる。電動機103には,電力変換器101によって駆動用の電力の供給が行われる。電力変換器101は,エレベーターコントローラ100のかご位置制御指令に従って電動機を制御するための電力を出力する。また,エンコーダなどのパルス発生器である回転センサは電動機103に取り付けられており,エレベーターコントローラ100は電動機103の回転によって生じるパルスを計数することにより,電動機103の速度,かご104の昇降路移動方向,位置,移動距離などを計算する。ここではこの電動機に取り付けられた回転センサをマシンエンコーダと呼称する。エレベーターコントローラが乗りかごを制動させたい場合は,ブレーキ電源停止指令及び動力電源停止指令(図示せず)を出力する。これらの停止指令を受けて,ブレーキ電源はブレーキ102の作動を,動力電源は電力変換器101への電源供給のカットを行い,かご104を制動させる。ブレーキ電源及び動力電源は,コンタクタと呼ばれる電磁接触器で構成される回路である。
The
ブレーキ102は、シーブを摩擦摺動で制動させるためのブレーキパッド、ブレーキパッドを引き上げてシーブとブレーキパッドのギャップを確保するためのソレノイドコイル及び鉄芯(コア)で構成される。通常、ソレノイドコイルに電力が供給されると、電磁力によりブレーキパッドが引き上げられ、シーブはブレーキパッドによる拘束がなくなり、自由に回転できるようになる。ソレノイドコイルへの給電はブレーキ電源からのリレーを介して行われる。またブレーキ102は、ブレーキ電流制御回路21と接続されている。このブレーキ電流制御回路21はソレノイドコイルへ流れる電流(ブレーキ電流22)を制御する回路であり、ブレーキの制動力を変化させることが可能な構成となっている。またブレーキ102にはブレーキチェックスイッチ8を備える。このブレーキチェックスイッチ8はブレーキパッドとシーブが離れている(接していない)かを機械的に検出するスイッチである。ブレーキチェックスイッチ8により検出されたブレーキとシーブが離れている(接していない)かの情報は、エレベーター制御部2に出力される。
The
ブレーキ電流制御回路21は、インバータ回路やチョッパ回路といった電流ないしは電圧を制御する変換器、ブレーキ電流を検出するホールCT、ブレーキ電流を制御するためのコントローラで構成され、エレベーターコントローラ100よりソレノイドコイルに流れる電流の指令値(ブレーキ電流指令)を受けて、その指令値にブレーキ電流22を制御する。なお、本実施例では制動力を変化させるための一例として、ソレノイドコイルを用いた電流に応じた制動力を変化させるブレーキ機構を例示したが、たとえば直動式のアクチュエータを用いることによる、距離に応じて制動力を変化させるブレーキや、回転機構を用いることによる、回転角に応じて制動力を変化させるブレーキ(シューブレーキなど)でもよい。総じて、ある指令に応じてブレーキの制動力を変化させるものであれば、ブレーキの種類には依存しない。
The brake
位置センサ5は,検出板6を検出することで,エレベーターが戸開可能な位置にいることを検出する,ドアゾーンセンサである。またかご速度センサ7は、かごの速度を検出するセンサであり、例えばガバナにつけられた回転センサで良い。ここではこのガバナに取り付けられた回転センサをガバナエンコーダと呼称する。なお、かごに直接加速度センサを取り付けても良い。 The position sensor 5 is a door zone sensor that detects that the elevator is at a position where the door can be opened by detecting the detection plate 6. The car speed sensor 7 is a sensor that detects the speed of the car, and may be a rotation sensor attached to a governor, for example. Here, the rotation sensor attached to the governor is referred to as a governor encoder. In addition, you may attach an acceleration sensor directly to a cage | basket | car.
図2は,ブレーキ制御部20と,トルク制御部23の処理の関係を示したブロック図である。エレベーター制御部2より,運転開始指令が速度指令出力処理部30に入力されると,速度指令出力処理部30は速度零の指令とする。その零速度指令と,かご速度検出処理部31より入力されるかご速度フィードバックの差分を取り,比例積分制御など目標値追従制御の処理を行い,最終的にトルク指令を出力する。つまりかごの速度が0になるようなトルク指令が出力される。かご速度検出処理部31は,マシンエンコーダなどから得られるかご速度フィードバック信号を検出し,速度指令出力処理へ出力する。
FIG. 2 is a block diagram showing the processing relationship between the
トルク制御処理部32は,速度指令出力処理部30より入力されるトルク指令と,モータ電流フィードバック信号より計算されるトルクフィードバック信号の差分を取り,比例積分制御などの処理を行い,トルク出力指令を出力する。トルク出力指令は電力変換器101に入力され,所望のトルクを発生させるよう,同期電動機に電圧が印加される。
The torque
ブレーキ制御部20は,ブレーキ電流指令作成処理部33と機種情報データベース(DB)34で構成される。ブレーキ電流指令作成処理33は,エレベーター制御部2より入力される運転開始指令を受けて,ブレーキ電流指令を機種情報DB34に基づき出力する。なお,この機種情報DB34については後述する。ブレーキ電流指令は,ブレーキ電流制御回路21に入力され,その指令に基づき,ブレーキ電流制御回路21がブレーキのソレノイドコイルに流すブレーキ電流22を制御する。
The
図3は、ブレーキ制御部20およびトルク制御部23が,走行開始時に動作するときの各波形の関係を,時系列で示したものである。また、説明の便宜上、時間軸を(a)から(d)の4区間に分割している。以下、基本の動作方法について、区間(a)から順に説明する。
FIG. 3 shows the relationship of each waveform in time series when the
区間(a)は、まだ運転開始指令が各制御部へ入力されておらず,ブレーキ電流指令はゼロの状態であり、つまりかごがブレーキにより制動されている状態となっている。これより、かご速度も零となっている。また,ブレーキで制動しており、トルク出力指令もゼロの状態である。 In the section (a), the operation start command is not yet input to each control unit, and the brake current command is zero, that is, the car is braked by the brake. As a result, the car speed is also zero. In addition, braking is performed with a brake, and the torque output command is also zero.
区間(b)は、運転開始指令が入力され,ブレーキ制御部20はブレーキ電流指令をゆっくりと上昇させることで,ブレーキ電流制御回路21から出力されるブレーキ電流がソレノイドに印加されブレーキ102を引き上げるようにしている。ブレーキ電流指令を上昇させると,ブレーキ102がゆっくりと引き上げられることで,ブレーキトルクTが減少していく。ブレーキトルクが減少し,かごとカウンタウエイトのアンバランストルクのほうが大きい状態になると,かごは移動しようとする。このとき,速度指令出力処理部30は,速度指令零を出力しているため,トルク制御処理部32はかご速度を零にするようなトルク出力指令を電力変換機101に出力し、電力変換機101トルク出力指令に応じたトルク出すように電動機102に電力を出力する。速度指令出力処理部30は,速度指令零を出力しているため,ブレーキが引き上げられブレーキトルクに対して相対的にアンバランストルクが大きくなるにつれて、速度を零に保つためのモータのトルクも大きくなり、トルク指令出力もそれにともなう。ブレーキをゆっくりと開くことで,ブレーキトルクがかごを静止させるのに足りない不足トルク分を,トルク出力指令が補うことで,かごの静止状態を維持する動きとなる。なお,区間(b)のブレーキ電流指令の傾きは,機種情報DB34を参照して決定する。これは,ブレーキの種類によって応答が異なることに対応するためであり,たとえばブレーキ電流指令の変化に対してブレーキトルクの応答が遅い場合は,傾きを小さくしたり,階段ステップ状にすることなどで,指令に対して応答が追従しやすいようにする。
In the section (b), an operation start command is input, and the
区間(c)は、ブレーキ電流が増加し,ブレーキのパッドがシーブから離れることで,ブレーキトルクがゼロの状態となる過渡的な変化を表している。このとき,区間(b)にてかごを静止するために必要なトルク出力を出しているので,ブレーキが開いた状態であっても,トルクの変化によるかご振動はあまり発生しない。 The section (c) represents a transitional change in which the brake torque is zero as the brake current increases and the brake pad moves away from the sheave. At this time, since the torque output necessary for stopping the car in the section (b) is output, even if the brake is open, the car vibration due to the torque change does not occur much.
区間(d)は、ブレーキが既に離れた状態を示す。この時,区間(c)にてかごを静止するのに十分なトルクを出力しており,かごは静止した状態を維持している。この時点では、トルク制御処理部32はかご速度を零にするようなトルク出力指令が出ている状態であるため、この後,速度指令が印加されて,かごが移動を始めるようになっている。
Section (d) shows a state where the brake has already been released. At this time, sufficient torque is output to stop the car in the section (c), and the car is kept stationary. At this point, the torque
図4は,本発明におけるフローチャート図を示したものである。まずステップS101では,エレベーター制御部2は運転開始指令の入力を検出する。運転開始指令がOFFであった場合には,そのまま処理を終了する。運転開始指令がONであった場合には,ステップS102へ進む。ステップS102では,マシンエンコーダの情報又はかご速度センサ7から出力された情報をエレベータ制御部を介して入力されたかご速度検出処理部31はかご速度に変換する。速度指令出力処理部30はかご速度が0であるかどうかを判定する。かご速度が0であった場合には,ステップS103へ進み,ブレーキ電流指令作成処理はブレーキの電流指令を増加させる。これにより,ステップS104として,ブレーキ電流の変化に伴いブレーキトルクが減少する。ステップS102にてかご速度が0でなかった場合には,ステップS105へ進み,速度指令出力処理部がかご速度を0とするようにトルクを制御する指令を出力する。ステップS106では,ブレーキパッドが離れたことを判定する。ブレーキパッドが離れたことを検出するのには,ブレーキの動作状態を検出するブレーキチェックスイッチ8が利用される。ブレーキパッドが離れていないときには,ステップS102の前に移動する。つまり、ブレーキパッドが離れないうちは、速度が発生していればそれを零に近づけるトルクを出力しつつ、ブレーキ電流を上昇させる制御を行う。これによりブレーキトルクを段階的に下げて行き、ブレーキパッドが離れた場合には,ステップS107へ進む。かご速度が0となるように速度制御器がトルクを出力しつつ,走行指令が入力されるまで待機の状態となる。また、ブレーキ電流作成処理部33による,電流指令作成増加処理を終了させ、一連の処理が終了する。
FIG. 4 shows a flowchart in the present invention. First, in step S101, the
以上の構成によれば、エレベータコントローラはゆっくりとブレーキを開くことで、ブレーキ力が弱まりかごとカウンタウエイトの差分であるアンバランストルクが少しずつ作用する状態になる。このとき,前記の制御部がトルク指令に対し追値制御することで,急激なトルク変化をすることなくアンバランストルクにゆっくりと追従することが可能になり,トルクによる加速度の変化が緩やかになる。このようにすることで,秤センサや回転センサに誤差が生じている場合でも,振動を低減することが可能になる。 According to the above configuration, the elevator controller slowly opens the brake so that the unbalance torque, which is the difference between the brake force and the counterweight, is applied little by little. At this time, the control unit performs additional value control with respect to the torque command, so that it is possible to follow the unbalance torque slowly without causing a sudden torque change, and the change in acceleration due to the torque becomes gentle. . By doing so, vibration can be reduced even if an error occurs in the scale sensor or the rotation sensor.
さらに本発明は駆動装置であるモーターの磁極位置を推定して駆動させる際にも有用である。特に,モーターには永久磁石同期電動機を利用するため,その一般的なトルク制御または速度制御の方法として,ベクトル制御と呼ばれる手法がとられている。この方法では,同期電動機の磁極位置を検出する必要があるため,回転センサを用いて磁極を検出する。同期電動機に取り付けられた回転センサの磁極位置に対する誤差も,補償トルクに影響を与えるため,この検出誤差が大きい場合や,センサレス駆動などで磁極位置に対する推定誤差が生じた時も,振動が発生することになる。 Furthermore, the present invention is also useful for estimating and driving the magnetic pole position of a motor that is a driving device. In particular, since a permanent magnet synchronous motor is used for the motor, a method called vector control is employed as a general torque control or speed control method. In this method, since it is necessary to detect the magnetic pole position of the synchronous motor, the magnetic pole is detected using a rotation sensor. Since the error with respect to the magnetic pole position of the rotation sensor attached to the synchronous motor also affects the compensation torque, vibration occurs even when this detection error is large or when an estimation error with respect to the magnetic pole position occurs due to sensorless drive, etc. It will be.
そこでステップS101の直後に磁極位置推定用の一定の電流値を出力した後、前記コントローラはゆっくりとブレーキを開くことで、ブレーキ力が弱まりかごとカウンタウエイトの差分であるアンバランストルクが少しずつ作用する状態になる。このとき,前記の制御部がトルク指令に対し追値制御することで,急激なトルク変化をすることなくアンバランストルクにゆっくりと追従することが可能になり,トルクによる加速度の変化が緩やかになる。このようにすることで,仮にトルクが反転してしまった場合でも、大きなトルクは必要なくまたブレーキ力がかかっている状態であるため大きな加速が生じず、振動を低減する事ができる。秤センサや回転センサに誤差が生じている場合でも,振動を低減することが可能になる。 Therefore, immediately after step S101, after outputting a constant current value for estimating the magnetic pole position, the controller slowly opens the brake, so that the unbalance torque, which is the difference between the brake force and the counterweight, acts little by little. It becomes a state to do. At this time, the control unit performs additional value control with respect to the torque command, so that it is possible to follow the unbalance torque slowly without causing a sudden torque change, and the change in acceleration due to the torque becomes gentle. . By doing so, even if the torque is reversed, a large torque is not necessary and a braking force is applied, so that a large acceleration does not occur and a vibration can be reduced. Even when an error occurs in the scale sensor or the rotation sensor, vibration can be reduced.
2 エレベーター制御部 2 Elevator control unit
Claims (4)
前記ブレーキと前記回転体の接触の有無を検知するブレーキチェックスイッチを備え、前記ブレーキチェックスイッチが前記ブレーキと前記回転体が離れた事を検出した場合、前記ブレーキ制御装置は前記ブレーキの前記回転体を完全に解放状態にする、ことを特徴とするエレベーター。 In the elevator according to claim 1,
A brake check switch for detecting whether or not the brake and the rotating body are in contact, and when the brake check switch detects that the brake and the rotating body are separated from each other, the brake control device detects the rotating body of the brake; An elevator characterized by completely releasing it.
前記ブレーキと前記回転体の接触の有無を検知するブレーキチェックスイッチを備え、前記ブレーキチェックスイッチが前記ブレーキと前記回転体が離れた事を検出し、前記エレベーター制御部から前記走行指令を受領するまで、前記トルク制御部前記かごの速度を零に近づけるように前記駆動装置のトルクを制御することを特徴とするエレベーター。 In the elevator according to claim 1,
A brake check switch for detecting whether or not the brake and the rotating body are in contact with each other until the brake check switch detects that the brake and the rotating body are separated and receives the travel command from the elevator control unit; The torque control unit controls the torque of the driving device so that the speed of the car approaches zero.
前記ブレーキ制御部は、備える機種情報DBに格納された情報に基づいて、前記ブレーキを前記回転体から徐々に解放するブレーキ制御方を決定する、ことを特徴とするエレベーター。 In the elevator according to claim 3,
The said brake control part determines the brake control method of releasing gradually the said brake from the said rotary body based on the information stored in the model information DB with which it equips, The elevator characterized by the above-mentioned.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016155183A JP2018024483A (en) | 2016-08-08 | 2016-08-08 | Elevator |
| EP17181466.8A EP3287403B1 (en) | 2016-08-08 | 2017-07-14 | Elevator |
| CN201710638748.8A CN107697772B (en) | 2016-08-08 | 2017-07-31 | Elevator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016155183A JP2018024483A (en) | 2016-08-08 | 2016-08-08 | Elevator |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018024483A true JP2018024483A (en) | 2018-02-15 |
Family
ID=59350791
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016155183A Pending JP2018024483A (en) | 2016-08-08 | 2016-08-08 | Elevator |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3287403B1 (en) |
| JP (1) | JP2018024483A (en) |
| CN (1) | CN107697772B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110510465A (en) * | 2019-08-09 | 2019-11-29 | 深圳市海浦蒙特科技有限公司 | It is a kind of to drive elevator starting control method and system by force |
| CN115043279A (en) * | 2022-07-19 | 2022-09-13 | 广州永日电梯有限公司 | Torque compensation control method for starting elevator |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57117476A (en) * | 1981-01-09 | 1982-07-21 | Hitachi Ltd | Controller for elevator |
| JPH0496675A (en) * | 1990-08-13 | 1992-03-30 | Nippon Otis Elevator Co | Brake control system for elevator controller |
| JPH06321441A (en) * | 1993-03-04 | 1994-11-22 | Otis Elevator Co | Pre-torque electric current supply method for elevator hoisting winch |
| JP2001122536A (en) * | 1999-10-21 | 2001-05-08 | Toshiba Corp | Control device for elevator |
| JP2002044975A (en) * | 2000-07-26 | 2002-02-08 | Fuji Electric Co Ltd | Induction motor control device |
| JP2006335553A (en) * | 2005-06-06 | 2006-12-14 | Yaskawa Electric Corp | Elevator control device and its control method |
| WO2014034461A1 (en) * | 2012-08-29 | 2014-03-06 | 三菱電機株式会社 | Elevator control apparatus, and elevator control method |
| JP2015127261A (en) * | 2013-11-26 | 2015-07-09 | 三菱電機株式会社 | Elevator controller and elevator control method |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015000796A (en) | 2013-06-17 | 2015-01-05 | 三菱電機株式会社 | Elevator |
| CN104671022B (en) * | 2013-11-26 | 2017-04-12 | 三菱电机株式会社 | Elevator control device and elevator control method |
-
2016
- 2016-08-08 JP JP2016155183A patent/JP2018024483A/en active Pending
-
2017
- 2017-07-14 EP EP17181466.8A patent/EP3287403B1/en active Active
- 2017-07-31 CN CN201710638748.8A patent/CN107697772B/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57117476A (en) * | 1981-01-09 | 1982-07-21 | Hitachi Ltd | Controller for elevator |
| JPH0496675A (en) * | 1990-08-13 | 1992-03-30 | Nippon Otis Elevator Co | Brake control system for elevator controller |
| JPH06321441A (en) * | 1993-03-04 | 1994-11-22 | Otis Elevator Co | Pre-torque electric current supply method for elevator hoisting winch |
| JP2001122536A (en) * | 1999-10-21 | 2001-05-08 | Toshiba Corp | Control device for elevator |
| JP2002044975A (en) * | 2000-07-26 | 2002-02-08 | Fuji Electric Co Ltd | Induction motor control device |
| JP2006335553A (en) * | 2005-06-06 | 2006-12-14 | Yaskawa Electric Corp | Elevator control device and its control method |
| WO2014034461A1 (en) * | 2012-08-29 | 2014-03-06 | 三菱電機株式会社 | Elevator control apparatus, and elevator control method |
| JP2015127261A (en) * | 2013-11-26 | 2015-07-09 | 三菱電機株式会社 | Elevator controller and elevator control method |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110510465A (en) * | 2019-08-09 | 2019-11-29 | 深圳市海浦蒙特科技有限公司 | It is a kind of to drive elevator starting control method and system by force |
| CN110510465B (en) * | 2019-08-09 | 2022-02-18 | 深圳市海浦蒙特科技有限公司 | Forced drive elevator starting control method and system |
| CN115043279A (en) * | 2022-07-19 | 2022-09-13 | 广州永日电梯有限公司 | Torque compensation control method for starting elevator |
| CN115043279B (en) * | 2022-07-19 | 2023-01-06 | 广州永日电梯有限公司 | Torque compensation control method for starting elevator |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107697772B (en) | 2019-11-19 |
| CN107697772A (en) | 2018-02-16 |
| EP3287403B1 (en) | 2021-06-30 |
| EP3287403A1 (en) | 2018-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3936578B2 (en) | Elevator hoisting machine and control system | |
| JP6592376B2 (en) | Elevator and rescue operation method | |
| JP5196914B2 (en) | Elevator control device | |
| JP2009525239A (en) | Managing encoder malfunctions in elevator drive systems | |
| CN104520223B (en) | The control setup of elevator and the control method of elevator | |
| CN106800232B (en) | Method for controlling an elevator | |
| JP5079288B2 (en) | Elevator equipment | |
| JP6581551B2 (en) | Elevator system | |
| JP2018024483A (en) | Elevator | |
| JPWO2009008049A1 (en) | Elevator equipment | |
| JP5143454B2 (en) | Elevator control device | |
| JP6297942B2 (en) | Elevator control device | |
| JP2014047022A (en) | Control method for movable body | |
| JP2011105455A (en) | Elevator device | |
| JP3550003B2 (en) | Elevator control device | |
| JP2016155623A (en) | Position detection system of elevator and elevator including position detection system | |
| JP2005170551A (en) | Elevator brake control device | |
| JP6655489B2 (en) | Elevator | |
| JP6578260B2 (en) | Elevator system and control method thereof | |
| WO2018154621A1 (en) | Elevator | |
| JP2009057186A (en) | Elevator control method | |
| EP4370462A1 (en) | Safety solution for elevators | |
| CN111252637A (en) | Elevator control system and elevator control method | |
| JP2023014525A (en) | Test method and test device of standby-type brake for elevator | |
| JP4140388B2 (en) | Emergency stop device for moving body and failure determination method for emergency stop device for moving body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170111 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190910 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200303 |