JP2018009865A - 回転体試験装置 - Google Patents
回転体試験装置 Download PDFInfo
- Publication number
- JP2018009865A JP2018009865A JP2016138558A JP2016138558A JP2018009865A JP 2018009865 A JP2018009865 A JP 2018009865A JP 2016138558 A JP2016138558 A JP 2016138558A JP 2016138558 A JP2016138558 A JP 2016138558A JP 2018009865 A JP2018009865 A JP 2018009865A
- Authority
- JP
- Japan
- Prior art keywords
- rotation axis
- wheel
- rotating body
- measured
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Landscapes
- Testing Of Balance (AREA)
Abstract
Description
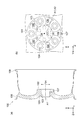
図1は、第1実施形態に係る回転体試験装置を示す斜視図である。回転体試験装置1は、被測定物を回転させたときに顕在化する動バランスを測定する。すなわち、第1実施形態に係る回転体試験装置は、動バランス測定装置や二面不釣り合い測定装置であるとも言える。被測定物とは、例えば、車両用タイヤのホイールである。回転体試験装置1は、ホイール100(図5参照)を保持し、回転軸線A1のまわりに回転させる。ホイール100が不釣り合いを有する場合、この回転により所定の大きさを有する不釣り合い力が周期的に発生する。回転体試験装置1は、不釣り合い力を取得すると共に、不釣り合い力を利用して動バランスに関する情報を得る。本実施形態でいう動バランスとは、いわゆる二面アンバランスと呼ばれるものであり、第1の面における不釣り合い質量及び基準位置からの位相と、第2の面における不釣り合い質量及び基準位置からの位相と、により示される。動バランスの詳細については後述する。
A1:圧電素子26Aに作用する動バランスによる力の大きさ
A2:圧電素子26Bに作用する動バランスによる力の大きさ
φ1:圧電素子26Aに作用する動バランスによる力の位相
φ2:圧電素子26Bに作用する動バランスによる力の位相
K1:圧電素子26Aの感度係数
K2:圧電素子26Bの感度係数
θ1:圧電素子26Aの位相係数
θ2:圧電素子26Bの位相係数
F11:圧電素子26Aに作用する力
F22:圧電素子26Bに作用する力
L1:アウターリムとインナーリムとの回転軸線A1に沿った距離
L2:インナーリムと圧電素子との回転軸線A1に沿った距離
L3:圧電素子間の回転軸線A1に沿った距離
R:回転軸線A1からバランスウエイト取り付け位置U1までの距離
B1:動バランスの大きさ
B2:動バランスの大きさ
Z1:位相角
Z2:位相角
第2実施形態に係る回転体試験装置について説明する。図12は、第2実施形態に係る回転体試験装置1Aを示す斜視図である。図12に示されるように、回転体試験装置1Aは、動バランスを測定する機能に加えて、ハブ径を測定するための機能をさらに有する点で、第1実施形態に係る回転体試験装置1と相違する。動バランスを測定するための構成は、第1実施形態に係る回転体試験装置1と同様であるため、詳細な説明は省略する。以下、ハブ径を測定するための構成について、詳細に説明する。
G1−G2=(C2−C1)/2…(5)
式(5)によれば、下記式(6)が得られる。
C2=(G1−G2)×2−C1…(6)
式(6)におけるC1をマスターリングなどに置き換えることにより、コーン33の頂面33aとレーザ測距計52までの距離の変化(G1−G2)と、マスターリングの直径C1とを式(6)に代入すればコーン33の頂面33aとレーザ測距計52までの距離G2であるときの直径C2が得られる。
第3実施形態に係る回転体試験装置について説明する。図14は、第3実施形態に係る回転体試験装置1Bを示す斜視図である。図14に示されるように、回転体試験装置1Bは、動バランスを測定する機能と、ハブ径を測定するための機能とに加えて、ホイール100の振れを測定する機能をさらに有する点で、第1実施形態に係る回転体試験装置1及び第2実施形態に係る回転体試験装置1Aと相違する。動バランスを測定するための構成は、第1実施形態に係る回転体試験装置1と同様であるため、詳細な説明は省略する。また、ハブ径を測定するための構成は、第2実施形態に係る回転体試験装置1Aと同様であるため、詳細な説明は省略する。以下、ホイール100の振れを測定するための構成について、詳細に説明する。
Claims (4)
- 回転体である被測定物の回転体試験装置であって、
前記被測定物に設けられた取付穴と係合することにより、前記被測定物を着脱可能に保持するチャックと、
前記チャックを回転軸線のまわりに回転させる回転駆動部と、
前記被測定物を回転させたときに、前記被測定物の動バランスに基づいて生じる不釣り合い力に関する情報を得る計測部と、
前記不釣り合い力に関する情報を利用して、前記被測定物の動バランスに関する情報を得る処理部と、を備え、
前記チャックは、
前記回転軸線を中心軸線とする本体部と、
前記本体部上において前記回転軸線のまわりに等間隔に配置されると共に、前記回転軸線に向かう方向の付勢力が付与される爪部と、
前記付勢力に抗して、前記回転軸線から離間する方向に前記爪部を移動させる押出部と、を有し、
前記被測定物を保持する第1の形態と、前記被測定物を解放する第2の形態と、を相互に切替可能であり、
前記第1の形態は、前記押出部が前記回転軸線に沿う一方向に移動することにより、前記爪部に対する前記押出部の押圧力に起因して前記爪部が前記回転軸線から離間する方向に移動して、前記爪部が前記被測定物の取付穴の内周面に押し当てられた状態であり、
前記第2の形態は、前記押出部が前記回転軸線に沿う前記一方向とは逆の方向に移動することにより、前記付勢力に起因して前記爪部が前記回転軸線に近づく方向に移動して、前記爪部が前記被測定物の取付穴の内周面から離間された形態である、回転体試験装置。 - 前記押出部は、前記爪部に当接する第1の当接面を含む錐台形状であり、
前記爪部は、前記第1の当接面と接触する第2の当接面を含み、
前記第2の当接面は、前記回転軸線と交差する方向に延在し、前記回転軸線側の端部に設けられる、請求項1に記載の回転体試験装置。 - 前記回転軸線に沿う前記押出部の位置を制御するための圧力を提供する圧力媒体を供給する圧力発生部をさらに備え、
前記回転駆動部は、前記チャックに連結され、前記圧力媒体を導く貫通穴が設けられた主軸を有し、
前記押出部の底部には、前記貫通穴を介して前記圧力媒体が供給され、
前記押出部は、前記圧力媒体から提供される圧力によって前記回転軸線に沿う位置が制御される、請求項1又は2に記載の回転体試験装置。 - 前記処理部は、
前記不釣り合い力に関する情報を利用して、前記動バランスに関する情報を得る第1の演算部と、
前記被測定物に追加部品が取り付けられたと仮定したときに生じる仮想不釣り合いに関する情報を保持する第2の演算部と、
前記動バランスに関する情報と前記仮想不釣り合いに関する情報とを利用して、前記追加部品が取り付けられていない前記被測定物の動バランスに関する情報を、前記追加部品が取り付けられた前記被測定物の動バランスに関する情報に補正する第3の演算部と、を有する、請求項1〜3の何れか一項に記載の回転体試験装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016138558A JP6764715B2 (ja) | 2016-07-13 | 2016-07-13 | 回転体試験装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016138558A JP6764715B2 (ja) | 2016-07-13 | 2016-07-13 | 回転体試験装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018009865A true JP2018009865A (ja) | 2018-01-18 |
| JP6764715B2 JP6764715B2 (ja) | 2020-10-07 |
Family
ID=60995371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016138558A Active JP6764715B2 (ja) | 2016-07-13 | 2016-07-13 | 回転体試験装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6764715B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022542551A (ja) * | 2019-07-25 | 2022-10-05 | アーファオエル・リスト・ゲーエムベーハー | 不平衡及び/又は不整合を検出するための方法及び駆動列試験台 |
| CN116123065A (zh) * | 2022-12-15 | 2023-05-16 | 烟台日冷机电科技有限公司 | 一种皮带轮空压机检测台 |
| CN118758493A (zh) * | 2024-09-06 | 2024-10-11 | 西安航空学院 | 一种车辆旋转部件的动平衡测试装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58158343U (ja) * | 1983-02-24 | 1983-10-22 | 株式会社島津製作所 | 動釣合試験装置 |
| JPH05203529A (ja) * | 1992-01-23 | 1993-08-10 | Hofuman Japan:Kk | ホイールバランサー |
| JPH10206270A (ja) * | 1996-12-30 | 1998-08-07 | Daewoo Electron Co Ltd | 軸固定方式の回転ヘッド装置の偏心質量の量算定方法と位置選定方法及びその装置 |
| JP2000241303A (ja) * | 1999-02-18 | 2000-09-08 | Kokusai Keisokki Kk | ホイール付きタイヤの試験装置 |
| JP2002195906A (ja) * | 2000-12-27 | 2002-07-10 | Shimadzu Corp | 釣合い試験機 |
-
2016
- 2016-07-13 JP JP2016138558A patent/JP6764715B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58158343U (ja) * | 1983-02-24 | 1983-10-22 | 株式会社島津製作所 | 動釣合試験装置 |
| JPH05203529A (ja) * | 1992-01-23 | 1993-08-10 | Hofuman Japan:Kk | ホイールバランサー |
| JPH10206270A (ja) * | 1996-12-30 | 1998-08-07 | Daewoo Electron Co Ltd | 軸固定方式の回転ヘッド装置の偏心質量の量算定方法と位置選定方法及びその装置 |
| JP2000241303A (ja) * | 1999-02-18 | 2000-09-08 | Kokusai Keisokki Kk | ホイール付きタイヤの試験装置 |
| JP2002195906A (ja) * | 2000-12-27 | 2002-07-10 | Shimadzu Corp | 釣合い試験機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022542551A (ja) * | 2019-07-25 | 2022-10-05 | アーファオエル・リスト・ゲーエムベーハー | 不平衡及び/又は不整合を検出するための方法及び駆動列試験台 |
| JP7556936B2 (ja) | 2019-07-25 | 2024-09-26 | アーファオエル・リスト・ゲーエムベーハー | 不平衡及び/又は不整合を検出するための方法及び駆動列試験台 |
| US12181367B2 (en) | 2019-07-25 | 2024-12-31 | Avl List Gmbh | Method and drivetrain test bench for detecting an imbalance and/or a misalignment |
| CN116123065A (zh) * | 2022-12-15 | 2023-05-16 | 烟台日冷机电科技有限公司 | 一种皮带轮空压机检测台 |
| CN118758493A (zh) * | 2024-09-06 | 2024-10-11 | 西安航空学院 | 一种车辆旋转部件的动平衡测试装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6764715B2 (ja) | 2020-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2940781T3 (es) | Máquina de mantenimiento de rueda y método para realizar la evaluación diagnóstica de una rueda de vehículo | |
| US11285543B2 (en) | Estimation of deflection of a cutting edge | |
| US8347713B2 (en) | Apparatus and method for measuring dynamic rigidity of a main shaft of a machine tool | |
| BRPI0617745B1 (pt) | Processo e dispositivo para a medição dinâmica do desquilíbrio de um rotor | |
| JP6532769B2 (ja) | 工作機械及び工具の振れ修正方法 | |
| US6631640B2 (en) | Method and apparatus for measuring dynamic balance | |
| US20160341548A1 (en) | Shaft accuracy measuring device for measuring accuracy of output shaft of motor | |
| ES2955520T3 (es) | Procedimiento para máquinas de caracterización de la uniformidad de neumáticos | |
| JP2018009865A (ja) | 回転体試験装置 | |
| JP2017156090A (ja) | 動釣合い試験装置 | |
| CN101248342A (zh) | 用于对带转子的试验物进行振动测量的带平衡装置的装置 | |
| KR20220038702A (ko) | 불균형 및/또는 오정렬을 감지하기 위한 방법 및 드라이브트레인 테스트 벤치 | |
| US20150288246A1 (en) | Motor Rotor Dynamic Balance Compensation Set | |
| JP2020183901A (ja) | タイヤユニフォミティデータの補正方法、およびタイヤユニフォミティマシン | |
| KR20200125834A (ko) | Cnc공작기계 스핀들주축의 런아웃 검사장치 및 검사방법 | |
| CN106610332A (zh) | 检测电动车车轮的平衡机及采用该平衡机检测动、静平衡中不平衡质量的方法 | |
| JP2018124261A (ja) | 回転体試験装置 | |
| JP5631264B2 (ja) | タイヤバランス試験方法及びタイヤバランス試験機 | |
| JP6273054B1 (ja) | 回転体試験装置 | |
| JP2013188827A (ja) | 工作機械の機械剛性測定用起振ツール及び工作機械の機械剛性測定方法 | |
| JP4276124B2 (ja) | マスセンタリング方法及び装置 | |
| KR101409199B1 (ko) | 공작기계 주축 회전정밀도 측정장치 | |
| CN103887943B (zh) | 一种用于驱动电机校准的方法和装置 | |
| CN205300850U (zh) | 一种立式动平衡机 | |
| CN203405134U (zh) | 轴承座内外径跳动量的检测装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190521 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200609 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200908 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200914 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6764715 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |