JP2018007979A - 運動支援装置及び運動支援方法、運動支援プログラム - Google Patents
運動支援装置及び運動支援方法、運動支援プログラム Download PDFInfo
- Publication number
- JP2018007979A JP2018007979A JP2016140876A JP2016140876A JP2018007979A JP 2018007979 A JP2018007979 A JP 2018007979A JP 2016140876 A JP2016140876 A JP 2016140876A JP 2016140876 A JP2016140876 A JP 2016140876A JP 2018007979 A JP2018007979 A JP 2018007979A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- user
- sensor
- sensor data
- exercise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Medical Treatment And Welfare Office Work (AREA)
Abstract
【解決手段】センサ機器100のモーションセンサより出力される利用者の身体の動作状態に対応したセンサデータに基づいて運動中の利用者の身体に作用している力を算出し、その力が身体活動によって発揮される力と同等であることを利用して、ユーザUSの身体の体重1kg分に作用している力の1分間当たりの平均値(K値)を算出することで、ユーザUSが、1分間当たりに体重1kg当たりに摂取する酸素量(酸素摂取量VO2)を推定する。
【選択図】図2
Description
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力と前記酸素摂取量との前記利用者に固有の相関関係に基づいて、前記酸素摂取量を推定することを特徴とする。
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量の変動を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力の変動に応じて前記酸素摂取量の変動を推定することを特徴とする。
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部より前記センサデータを取得するステップと、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出するステップと、
前記単位動作力と前記利用者の前記利用者の前記単位時間当たりの酸素摂取量との前記利用者に固有の相関関係に基づいて、前記利用者の前記酸素摂取量を推定するステップと、
を含むことを特徴とする。
運動支援装置における運動支援プログラムであって、
前記運動支援装置は、移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部を有し、
コンピュータに、
前記センサ部より前記センサデータを取得させ、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出させ、
前記単位動作力と前記利用者の前記利用者の前記単位時間あたりの酸素摂取量との前記利用者に固有の相関関係に基づいて前記利用者の前記酸素摂取量を推定させることを特徴とする。
(運動支援装置)
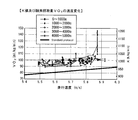
図1は、本発明に係る運動支援装置の第1の実施形態を示す概略図である。図2は、本実施形態に係る運動支援装置に適用される構成例を示す機能ブロック図である。図2(a)はセンサ機器の構成例を示す機能ブロック図であり、図2(b)は外部表示機器の構成例を示す機能ブロック図である。図3は、本実施形態に係る運動支援装置に適用されるK値と酸素摂取量VO2との相関関係の一例を示す検証データである。
センサ機器100は、ランニングやウォーキング、サイクリング等の運動中の身体の周期的な動作を、モーションセンサを用いて測定し、収集したセンサデータに基づいて、運動中のユーザUSの運動能力評価指標を含む、運動状態に関する各種の解析データを算出又は推定する機能を有している。

外部表示機器200は、上述したセンサ機器100によりユーザUSの運動中に取得したセンサデータ等に基づいて算出又は推定された運動能力評価指標(K値、酸素摂取量)を含む、運動状態に関する解析結果を、ユーザUSが指定した任意の表示形態、又は、予め設定された表示形態で表示する機能を有している。
次に、本実施形態に係る運動支援装置における制御方法(運動支援方法)について、図面を参照して説明する。なお、以下に示す運動支援方法は、センサ機器100の演算処理部130、及び、外部表示機器200の制御部230において、所定のプログラムを実行することにより実現される。
図4は、本実施形態に係る運動支援方法の一例を示すフローチャートである。
次に、上述した第1の実施形態における変形例について図面を参照して説明する。
図5は、本実施形態に係る運動支援装置の変形例を示す機能ブロック図である。ここで、上述した実施形態と同等の構成については同一の符号を付してその説明を簡略化する。図6、図7は、本変形例に適用される平均波形検出処理の説明図である。
左足ポイント数=round(400×cyc_L/cyc)
右足ポイント数=round(400×cyc_R/cyc)
1サンプルポイント当たりの時間は、T/400(sec)となるので、400サンプルポイントの加速度の大きさをすべて合計したものにT/400を乗じることにより、1周期にユーザUSの身体の体重1kg分に働く力の累積値Wが求められる。
次に、本発明に係る運動支援装置の第2の実施形態について図面を参照して説明する。
図8は、第2の実施形態に係る運動支援装置に適用される構成例を示す機能ブロック図である。図8(a)はセンサ機器の構成例を示す機能ブロック図であり、図8(b)は外部表示機器の構成例を示す機能ブロック図である。ここで、上述した第1の実施形態と同等の構成については同一の符号を付してその説明を簡略化する。
次に、上述した各実施形態に示した運動支援装置において、外部表示機器200の表示部250に表示される解析結果の例について、図面を参照して具体的に説明する。
図9〜図17は、本発明に係る運動支援装置における解析結果の表示例を示す図である。
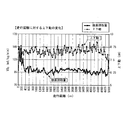
したがって、今回のレースでの結果は、普段よりピッチが大きくなったことが主要因と推測される。
Y=4.26X+584.69
Y:K(N/kg/min)
X:VO2(ml/kg/min)
X=0.23Y−137.34
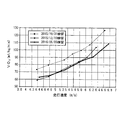
この式のYに図14のグラフのK値を当てはめることにより、図15のグラフに示す走行速度に対する酸素摂取量VO2の変化を示す解析結果に換算される。
また、本実施形態によれば、表示された解析結果が、所定の基準値や許容範囲に対して逸脱している程度に応じて報知情報を出力することができるので、解析結果の変化や異常を迅速かつ確実に把握して、運動状態やフォームの改善等に役立てることができる。
以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。
[1]
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力と前記酸素摂取量との前記利用者に固有の相関関係に基づいて、前記酸素摂取量を推定することを特徴とする運動支援装置。
演算処理部は、
前記センサデータに基づいて、前記利用者の前記移動動作の周期を検出し、
前記利用者の身体の単位重さ分に作用している力の前記周期の期間に亘る累積値を算出し、
前記累積値に基づいて前記単位動作力を算出することを特徴とする[1]に記載の運動支援装置。
前記演算処理部において、前記酸素摂取量は前記単位動作力の一次関数とされ、複数の利用者における前記一次関数の係数が互いに異なっており、
前記演算処理部は、特定の前記利用者における前記一次関数の特定の係数を記憶しており、前記特定の利用者の前記酸素摂取量を推定するときに、前記特定の係数を用いて前記特定の利用者の前記酸素摂取量を推定することを特徴とする[1]又は[2]に記載の運動支援装置。
前記センサ部は、前記移動動作において前記身体に加わる加速度を検出して加速度データとして出力する加速度センサと、前記移動動作において前記身体に加わる角速度を検出して角速度データとして出力するジャイロセンサと、を有し、
前記演算処理部は、前記加速度データ及び前記角速度データのいずれかに基づいて、前記移動動作の周期を検出することを特徴とする[1]乃至[3]のいずれかに記載の運動支援装置。
前記センサ部は、前記利用者の前記移動動作に対して、前記利用者の胴体の動きに対応した動きをする人体の部位に密着して装着されることを特徴とする[1]乃至[4]のいずれかに記載の運動支援装置。
前記演算処理部は、
前記移動動作における前記利用者の一方の足の接地タイミングの間隔を一周期とし、複数の周期における前記センサデータの波形を平均した平均波形を算出し、
前記一方の足の接地タイミングから他方の足の接地タイミングまでの期間について、複数の前記センサデータの波形を平均した第1の波形を算出し、
前記他方の足の接地タイミングから前記一方の足の接地タイミングまでの期間について、複数のセンサデータの波形を平均した第2の波形を算出し、
前記平均波形に基づいて前記第1の波形及び前記第2の波形を正規化して、前記正規化された前記第1の波形及び前記第2の波形を、時間が連続するように繋ぎ合わせることにより、前記移動動作における正規化された一周期の平均波形を生成して、前記周期を検出し、
前記正規化された平均波形の周期に基づいて、前記動作力を算出することを特徴とする[1]乃至[5]のいずれかに記載の運動支援装置。
前記酸素摂取量を運動能力評価指標として含む解析結果を、所定の表示形態で表示する表示部を、さらに備えることを特徴とする[1]乃至[6]のいずれかに記載の運動支援装置。
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量の変動を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力の変動に応じて前記酸素摂取量の変動を推定することを特徴とする運動支援装置。
移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部より前記センサデータを取得するステップと、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出するステップと、
前記単位動作力と前記利用者の前記利用者の前記単位時間当たりの酸素摂取量との前記利用者に固有の相関関係に基づいて、前記利用者の前記酸素摂取量を推定するステップと、
を含むことを特徴とする運動支援方法。
運動支援装置における運動支援プログラムであって、
前記運動支援装置は、移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部を有し、
コンピュータに、
前記センサ部より前記センサデータを取得させ、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出させ、
前記単位動作力と前記利用者の前記利用者の前記単位時間あたりの酸素摂取量との前記利用者に固有の相関関係に基づいて前記利用者の前記酸素摂取量を推定させることを特徴とする運動支援プログラム。
110 センサ部
112 加速度センサ
114 ジャイロセンサ
120 速度情報取得部
130 演算処理部
132 地軸推定部
134 接地検出部
136 周期検出部
138 K値計算部
140 VO2推定部
144 左右接地検出部
146 平均波形検出部
150 メモリ部
160 I/F部
200 外部表示機器
210 操作部
220 I/F部
230 制御部
240 メモリ部
250 表示部
260 報知部
330 制御部
430 演算処理部
432 地軸推定部
434 接地検出部
436 周期検出部
438 K値計算部
440 VO2推定部
US ユーザ
Claims (10)
- 移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力と前記酸素摂取量との前記利用者に固有の相関関係に基づいて、前記酸素摂取量を推定することを特徴とする運動支援装置。 - 演算処理部は、
前記センサデータに基づいて、前記利用者の前記移動動作の周期を検出し、
前記利用者の身体の単位重さ分に作用している力の前記周期の期間に亘る累積値を算出し、
前記累積値に基づいて前記単位動作力を算出することを特徴とする請求項1に記載の運動支援装置。 - 前記演算処理部において、前記酸素摂取量は前記単位動作力の一次関数とされ、複数の利用者における前記一次関数の係数が互いに異なっており、
前記演算処理部は、特定の前記利用者における前記一次関数の特定の係数を記憶しており、前記特定の利用者の前記酸素摂取量を推定するときに、前記特定の係数を用いて前記特定の利用者の前記酸素摂取量を推定することを特徴とする請求項1又は2に記載の運動支援装置。 - 前記センサ部は、前記移動動作において前記身体に加わる加速度を検出して加速度データとして出力する加速度センサと、前記移動動作において前記身体に加わる角速度を検出して角速度データとして出力するジャイロセンサと、を有し、
前記演算処理部は、前記加速度データ及び前記角速度データのいずれかに基づいて、前記移動動作の周期を検出することを特徴とする請求項1乃至3のいずれかに記載の運動支援装置。 - 前記センサ部は、前記利用者の前記移動動作に対して、前記利用者の胴体の動きに対応した動きをする人体の部位に密着して装着されることを特徴とする請求項1乃至4のいずれかに記載の運動支援装置。
- 前記演算処理部は、
前記移動動作における前記利用者の一方の足の接地タイミングの間隔を一周期とし、複数の周期における前記センサデータの波形を平均した平均波形を算出し、
前記一方の足の接地タイミングから他方の足の接地タイミングまでの期間について、複数の前記センサデータの波形を平均した第1の波形を算出し、
前記他方の足の接地タイミングから前記一方の足の接地タイミングまでの期間について、複数のセンサデータの波形を平均した第2の波形を算出し、
前記平均波形に基づいて前記第1の波形及び前記第2の波形を正規化して、前記正規化された前記第1の波形及び前記第2の波形を、時間が連続するように繋ぎ合わせることにより、前記移動動作における正規化された一周期の平均波形を生成して、前記周期を検出し、
前記正規化された平均波形の周期に基づいて、前記動作力を算出することを特徴とする請求項1乃至5のいずれかに記載の運動支援装置。 - 前記酸素摂取量を運動能力評価指標として含む解析結果を、所定の表示形態で表示する表示部を、さらに備えることを特徴とする請求項1乃至6のいずれかに記載の運動支援装置。
- 移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部と、
前記センサデータに基づいて前記利用者の単位時間当たりの酸素摂取量の変動を推定する演算処理部と、
を備え、
演算処理部は、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の前記単位時間当たりの平均値を単位動作力として算出し、
前記単位動作力の変動に応じて前記酸素摂取量の変動を推定することを特徴とする運動支援装置。 - 移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部より前記センサデータを取得するステップと、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出するステップと、
前記単位動作力と前記利用者の前記利用者の前記単位時間当たりの酸素摂取量との前記利用者に固有の相関関係に基づいて、前記利用者の前記酸素摂取量を推定するステップと、
を含むことを特徴とする運動支援方法。 - 運動支援装置における運動支援プログラムであって、
前記運動支援装置は、移動動作中の利用者の身体の動作状態に対応するセンサデータを出力するセンサ部を有し、
コンピュータに、
前記センサ部より前記センサデータを取得させ、
前記センサデータに基づいて、前記利用者の身体の単位重さ分に作用している力の単位時間当たりの平均値を単位動作力として算出させ、
前記単位動作力と前記利用者の前記利用者の前記単位時間あたりの酸素摂取量との前記利用者に固有の相関関係に基づいて前記利用者の前記酸素摂取量を推定させることを特徴とする運動支援プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016140876A JP2018007979A (ja) | 2016-07-15 | 2016-07-15 | 運動支援装置及び運動支援方法、運動支援プログラム |
| JP2020159497A JP6969761B2 (ja) | 2016-07-15 | 2020-09-24 | 運動支援装置及び運動支援方法、運動支援プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016140876A JP2018007979A (ja) | 2016-07-15 | 2016-07-15 | 運動支援装置及び運動支援方法、運動支援プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020159497A Division JP6969761B2 (ja) | 2016-07-15 | 2020-09-24 | 運動支援装置及び運動支援方法、運動支援プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018007979A true JP2018007979A (ja) | 2018-01-18 |
| JP2018007979A5 JP2018007979A5 (ja) | 2019-07-11 |
Family
ID=60994561
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016140876A Pending JP2018007979A (ja) | 2016-07-15 | 2016-07-15 | 運動支援装置及び運動支援方法、運動支援プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018007979A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190109891A (ko) * | 2018-03-19 | 2019-09-27 | 재단법인대구경북과학기술원 | 생체 정보 추정 슈즈 및 이를 포함하는 시스템 |
| CN113473901A (zh) * | 2019-04-09 | 2021-10-01 | 松下知识产权经营株式会社 | 行动支持系统及行动支持方法 |
| JP2021191432A (ja) * | 2019-11-01 | 2021-12-16 | 株式会社アシックス | 推奨走行ペース算出システム及び推奨走行ペース算出方法 |
| JP7155345B1 (ja) | 2021-06-10 | 2022-10-18 | カシオ計算機株式会社 | 情報処理装置、情報処理方法及びプログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001258870A (ja) * | 2000-03-14 | 2001-09-25 | Tabai Espec Corp | 運動カロリー測定方法及び装置 |
| JP2006263449A (ja) * | 2005-02-28 | 2006-10-05 | Jukunen Taiiku Daigaku Research Center | 脚筋力算出装置、脚筋力算出方法及びプログラム |
| US20110040193A1 (en) * | 2008-05-02 | 2011-02-17 | Firstbeat Technologies Oy | Fitness test |
| JP2016063871A (ja) * | 2014-09-22 | 2016-04-28 | カシオ計算機株式会社 | 運動解析装置、方法、およびプログラム |
-
2016
- 2016-07-15 JP JP2016140876A patent/JP2018007979A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001258870A (ja) * | 2000-03-14 | 2001-09-25 | Tabai Espec Corp | 運動カロリー測定方法及び装置 |
| JP2006263449A (ja) * | 2005-02-28 | 2006-10-05 | Jukunen Taiiku Daigaku Research Center | 脚筋力算出装置、脚筋力算出方法及びプログラム |
| US20110040193A1 (en) * | 2008-05-02 | 2011-02-17 | Firstbeat Technologies Oy | Fitness test |
| JP2016063871A (ja) * | 2014-09-22 | 2016-04-28 | カシオ計算機株式会社 | 運動解析装置、方法、およびプログラム |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190109891A (ko) * | 2018-03-19 | 2019-09-27 | 재단법인대구경북과학기술원 | 생체 정보 추정 슈즈 및 이를 포함하는 시스템 |
| KR102029576B1 (ko) | 2018-03-19 | 2019-10-07 | 재단법인대구경북과학기술원 | 생체 정보 추정 슈즈 및 이를 포함하는 시스템 |
| CN113473901A (zh) * | 2019-04-09 | 2021-10-01 | 松下知识产权经营株式会社 | 行动支持系统及行动支持方法 |
| JP2021191432A (ja) * | 2019-11-01 | 2021-12-16 | 株式会社アシックス | 推奨走行ペース算出システム及び推奨走行ペース算出方法 |
| JP7350031B2 (ja) | 2019-11-01 | 2023-09-25 | 株式会社アシックス | 推奨走行ペース算出システム及び推奨走行ペース算出方法 |
| JP7155345B1 (ja) | 2021-06-10 | 2022-10-18 | カシオ計算機株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP2022189166A (ja) * | 2021-06-10 | 2022-12-22 | カシオ計算機株式会社 | 情報処理装置、情報処理方法及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11109804B2 (en) | Wearable sports monitoring equipment and method for characterizing sports performances or sportspersons | |
| US11833391B2 (en) | Integrated portable device and method implementing an accelerometer for analyzing biomechanical parameters of a stride | |
| CN104165637B (zh) | 用于确定运动感测装置的附着位置的方法和装置 | |
| KR100601981B1 (ko) | 활동패턴 감시 방법 및 장치 | |
| JP5896240B2 (ja) | 運動支援装置、運動支援方法及び運動支援プログラム | |
| JP3984253B2 (ja) | 健康管理用装置 | |
| JP2015058096A (ja) | 運動支援装置及び運動支援方法、運動支援プログラム | |
| JP2017158999A (ja) | 最大酸素消費をリアルタイムに監視する監視方法 | |
| JP2018007979A (ja) | 運動支援装置及び運動支援方法、運動支援プログラム | |
| JP2001258870A (ja) | 運動カロリー測定方法及び装置 | |
| US10251598B2 (en) | Waistband monitoring analysis for a user | |
| JP2004358229A (ja) | 身体運動解析装置および身体運動解析システム | |
| EP3515301A1 (en) | Systems, devices, and methods for biometric assessment | |
| US10912510B2 (en) | Index deriving device, wearable device, and mobile device | |
| US10561343B2 (en) | Index deriving device, wearable device, and mobile device | |
| JP6969761B2 (ja) | 運動支援装置及び運動支援方法、運動支援プログラム | |
| JP6432665B2 (ja) | 運動装置、腕降り角度検出方法及びプログラム | |
| US12109479B2 (en) | Exercise assistance device, exercise assistance method, and storage medium | |
| JP2014195711A (ja) | カロリー消費量計算装置及びカロリー消費量計算方法 | |
| JP4826192B2 (ja) | 歩行計 | |
| Levschuk | A wearable inertial sensor system for gait and balance monitoring |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190528 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200428 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200817 |