JP2017535008A - 道路交通利用者の移動モデルを形成するための方法及び装置 - Google Patents
道路交通利用者の移動モデルを形成するための方法及び装置 Download PDFInfo
- Publication number
- JP2017535008A JP2017535008A JP2017534881A JP2017534881A JP2017535008A JP 2017535008 A JP2017535008 A JP 2017535008A JP 2017534881 A JP2017534881 A JP 2017534881A JP 2017534881 A JP2017534881 A JP 2017534881A JP 2017535008 A JP2017535008 A JP 2017535008A
- Authority
- JP
- Japan
- Prior art keywords
- road traffic
- movement
- traffic user
- vehicle
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/005—Traffic control systems for road vehicles including pedestrian guidance indicator
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
Abstract
Description
道路交通利用者の最新の移動ベクトルを読み取る読取ステップ;
所定時間にわたる道路交通利用者の特徴的な移動値を得るために、所定時間にわたって読み取られた移動ベクトルを使用する使用ステップ:及び
移動値を使用して移動モデルを決定する決定ステップを含む。
危険にさらされた道路交通利用者に関する静的及び動的な情報を判定及び処理する特定モジュール、
例えば通信規格802.11pに基づいた通信モジュール、
例えば6〜8.5GHzの超広帯域に基づいた位置検知モジュール、及び
例えば拡張カルマンフィルタ又は粒子フィルタに基づいた追跡モジュール。
例えば、加速度測定器及びジャイロスコープ3Dからなる3D微小電子機械システム(MEMS)を備える慣性測定モジュール、
方位測定モジュール、例えば3D‐MEMSコンパス、
全地球測位システム(GNSS)モジュール、例えばA‐GPS又は多重周波数ガリレオ、並びに現在地及び測位モジュール。
Claims (10)
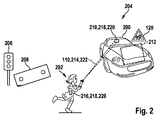
- 道路交通利用者(200,202)の移動モデル(102)を形成する方法(600)において、該方法(600)が、
前記道路交通利用者(200,202)の最新の移動ベクトル(110)を読み取る読取ステップ(602)と、
所定時間にわたる道路交通利用者(200,202)の特徴的な移動値(112)を得るために、所定時間にわたって読み取られた前記移動ベクトル(110)を使用する使用ステップ(604)と、
移動値(112)を使用して移動モデル(102)を決定する決定ステップ(606)と
を含む方法(600)。 - 請求項1に記載の方法(600)において、
別の所定時間のための別の移動値(112)を得るために、読取ステップ(602)及び使用ステップ(604)を再び実施し、
決定ステップ(606)において、別の移動値(112)を使用して前記移動モデル(102)を更新する方法。 - 請求項1又は2に記載の方法(600)において、
前記道路交通利用者(200,202)の最新の位置情報、最新の前記移動ベクトル(110)、及び前記モデル(102)を使用して、道路交通利用者(200)の見込み滞在領域を判定するステップを含む方法(600)。 - 請求項1から3までのいずれか一項に記載の方法(600)において、
周辺(204)にいる少なくとも1人の他の前記道路交通利用者(200,202)について、見込み滞在領域、前記移動モデル(102)及び/又は前記移動ベクトル(110)を準備するステップを含む方法(600)。 - 請求項4に記載の方法(600)において、
他の道路交通利用者(200,202)が当該道路交通利用者(200,202)を特定できるように、準備ステップにおいて、さらに当該道路交通使用者(200,202)の署名を準備する方法(600)。 - 請求項1から5までのいずれか一項に記載の方法(600)において、
前記読取ステップ(602)において、前記移動ベクトル(110)として、前記道路交通利用者(200,202)の立体的な加速度及び立体的な回転速度を読み取る方法(600)。 - 請求項1から6までのいずれか一項に記載の方法(600)において、
使用ステップ(604)において、特徴的前記移動値(112)として、前記道路交通利用者(200,202)の少なくとも1つの特徴的な移動プロセスにおける平均的な加速度を判定する方法。 - 道路交通利用者(200,202)の移動モデル(102)を形成するための装置(100)において、
前記道路交通利用者(200,202)の最新の前記移動ベクトル(110)を読み取るための読取手段(102)と、
所定時間にわたる前記道路交通利用者(200,202)の特徴的な移動値(112)を得るために、所定時間にわたって読み取られた移動ベクトル(110)を使用するための使用手段(604)と、
前記移動値(112)を使用して移動モデル(102)を決定するための決定手段(106)と
を備える装置(100)。 - 請求項1から7までのいずれか一項に記載の方法の全てのステップを実施するように構成されたコンピュータプログラム。
- 請求項9に記載のコンピュータプログラムが保存された機械読取可能なメモリ媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014219148.3 | 2014-09-23 | ||
| DE102014219148.3A DE102014219148A1 (de) | 2014-09-23 | 2014-09-23 | Verfahren und Vorrichtung zum Erstellen eines Bewegungsmodells eines Straßenverkehrsteilnehmers |
| PCT/EP2015/067517 WO2016045832A1 (de) | 2014-09-23 | 2015-07-30 | VERFAHREN UND VORRICHTUNG ZUM ERSTELLEN EINES BEWEGUNGSMODELLS EINES STRAßENVERKEHRSTEILNEHMERS |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017535008A true JP2017535008A (ja) | 2017-11-24 |
Family
ID=53887080
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017534881A Pending JP2017535008A (ja) | 2014-09-23 | 2015-07-30 | 道路交通利用者の移動モデルを形成するための方法及び装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10127815B2 (ja) |
| EP (1) | EP3198579A1 (ja) |
| JP (1) | JP2017535008A (ja) |
| CN (1) | CN107077781A (ja) |
| DE (1) | DE102014219148A1 (ja) |
| WO (1) | WO2016045832A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019187797A (ja) * | 2018-04-25 | 2019-10-31 | Joyson Safety Systems Japan株式会社 | 背負い型エアバッグ装置及びエアバッグシステム |
| US11131749B2 (en) | 2016-12-14 | 2021-09-28 | Robert Bosch Gmbh | MIMO radar sensor for motor vehicles |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6256239B2 (ja) * | 2014-07-25 | 2018-01-10 | 株式会社デンソー | 歩行者検出装置および歩行者検出方法 |
| DE102015219511B4 (de) * | 2015-10-08 | 2019-06-19 | Zf Friedrichshafen Ag | Tragbare Vorrichtung |
| US10049566B2 (en) * | 2016-03-02 | 2018-08-14 | Michael E. Shanahan | Systems and methods for intra-vehicle pedestrian and infrastructure communication |
| JP6171046B1 (ja) | 2016-04-26 | 2017-07-26 | 京セラ株式会社 | 電子機器、制御方法、及び制御プログラム |
| JP6529929B2 (ja) | 2016-05-18 | 2019-06-12 | 京セラ株式会社 | 電子機器、制御方法、及び制御プログラム |
| JP6455492B2 (ja) * | 2016-07-19 | 2019-01-23 | トヨタ自動車株式会社 | 走行支援装置 |
| DE102016009954A1 (de) * | 2016-08-16 | 2018-02-22 | MSR ENGINEERING Heiko Evers e.K. | Verfahren zur Früherkennung von Kollisionen zwischen mindestens zwei mobilen Objekten und Frühwarnsystem |
| DE102016217532A1 (de) | 2016-09-14 | 2018-03-15 | Continental Teves Ag & Co. Ohg | Mobile Funkeinheit zur Verbesserung der Verkehrssicherheit |
| DE102016217531A1 (de) * | 2016-09-14 | 2018-03-15 | Continental Automotive Gmbh | Verfahren zur Verbesserung der Verkehrssicherheit |
| DE102016118095A1 (de) * | 2016-09-26 | 2018-03-29 | Deutsche Telekom Ag | System und Verfahren zur Vermeidung eines Zusammenpralls eines Vehikels mit einem sich zumindest zeitweise für einen Nutzer des Vehikels unbemerkbar bewegenden Objekts |
| DE102017203785A1 (de) | 2017-03-08 | 2018-09-13 | Bayerische Motoren Werke Aktiengesellschaft | Überwachungssystem |
| JP6613265B2 (ja) * | 2017-06-01 | 2019-11-27 | 本田技研工業株式会社 | 予測装置、車両、予測方法およびプログラム |
| EP3413288A1 (en) * | 2017-06-09 | 2018-12-12 | Honda Research Institute Europe GmbH | Method for assisting a person in acting in a dynamic environment and corresponding system |
| US10431093B2 (en) | 2017-06-20 | 2019-10-01 | Zf Friedrichshafen Ag | System and method for collision avoidance |
| US10579788B2 (en) | 2017-08-17 | 2020-03-03 | Waymo Llc | Recognizing assigned passengers for autonomous vehicles |
| DE102017217876B4 (de) * | 2017-10-09 | 2019-05-16 | Zf Friedrichshafen Ag | Vorrichtung und Verfahren zur Verbesserung des Raumgefühls eines Nutzers |
| CN107705550A (zh) * | 2017-10-24 | 2018-02-16 | 努比亚技术有限公司 | 交通安全预警方法、移动终端及计算机可读存储介质 |
| GB2567845B (en) * | 2017-10-26 | 2023-02-01 | Focal Point Positioning Ltd | A method and system for combining sensor data |
| CN109189210A (zh) * | 2018-08-06 | 2019-01-11 | 百度在线网络技术(北京)有限公司 | 混合现实交互方法、装置及存储介质 |
| DE102018119955A1 (de) * | 2018-08-16 | 2020-02-20 | Sylvia Maria Klawitter | Warneinrichtung, Beleuchtungseinrichtung, Fahrzeug, Verkehrswarnsystem, Verfahren zum Schutz eines Verkehrsteilnehmers |
| CN108897026A (zh) * | 2018-08-28 | 2018-11-27 | 北京讯腾智慧科技股份有限公司 | 卫星导航信号受遮挡情况下的合作车辆定位方法及装置 |
| DE102018214635A1 (de) * | 2018-08-29 | 2020-03-05 | Robert Bosch Gmbh | Verfahren zur Vorhersage zumindest eines zukünftigen Geschwindigkeitsvektors und/oder einer zukünftigen Pose eines Fußgängers |
| CN109191913B (zh) * | 2018-11-01 | 2020-07-14 | 深圳市戴升智能科技有限公司 | 行人检测方法、装置、计算机设备及存储介质 |
| DE102019220562A1 (de) * | 2019-12-23 | 2021-06-24 | Robert Bosch Gmbh | Verfahren zur Erfassung der relativen Position eines Objekts oder einer Person zu einem Fahrzeug |
| DE102020004192B4 (de) | 2020-07-13 | 2022-08-04 | Daimler Truck AG | Verfahren zur Kommunikation eines zumindest teilweise autonom fahrenden Kraftfahrzeugs und einem Fußgänger mittels eines Systems, sowie System |
| WO2022073882A1 (de) * | 2020-10-08 | 2022-04-14 | Volkswagen Aktiengesellschaft | VERFAHREN UND STEUEREINRICHTUNG ZUM ERMITTELN EINER KOLLISIONSRELEVANTEN ZEITGRÖßE FÜR EIN KRAFTFAHRZEUG |
| US20220203889A1 (en) * | 2020-12-24 | 2022-06-30 | Ronald E. Smith, JR. | Vehicle and pedestrian alert system and vehicle including an alert system |
| CN113132006B (zh) * | 2021-04-23 | 2022-08-16 | 湖南大学 | 一种基于图像传感器的移动车辆高精度可见光定位方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007160076A (ja) * | 2005-11-15 | 2007-06-28 | Univ Nihon | 人の姿勢動作判別装置およびエネルギー消費量算出装置 |
| JP2008217429A (ja) * | 2007-03-05 | 2008-09-18 | Ntt Docomo Inc | 歩行者情報提供装置、歩行者情報提供システム、及び歩行者情報提供方法 |
| JP2010102437A (ja) * | 2008-10-22 | 2010-05-06 | Toyota Central R&D Labs Inc | 歩行者飛び出し予測装置及びプログラム |
| JP2012513651A (ja) * | 2008-12-23 | 2012-06-14 | コンテイネンタル・セイフテイ・エンジニヤリング・インターナシヨナル・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 車両と生物との衝突確率を求める方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10253192A1 (de) * | 2002-11-15 | 2004-05-27 | Philips Intellectual Property & Standards Gmbh | Verfahren und Vorrichtung zur Vermeidung von Kollisionen |
| US7885758B2 (en) * | 2005-06-30 | 2011-02-08 | Marvell World Trade Ltd. | GPS-based traffic monitoring system |
| US20090228172A1 (en) * | 2008-03-05 | 2009-09-10 | Gm Global Technology Operations, Inc. | Vehicle-to-vehicle position awareness system and related operating method |
| DE102008049824B4 (de) * | 2008-10-01 | 2014-09-04 | Universität Kassel | Verfahren zur Kollisionsvermeidung |
| DE102009035072A1 (de) * | 2009-07-28 | 2011-02-10 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zur Prädiktion der Position und/oder Bewegung eines Objekts relativ zu einem Fahrzeug |
| CN103155015B (zh) * | 2010-09-08 | 2014-12-31 | 丰田自动车株式会社 | 移动物预测装置、假想活动物预测装置、程序模块、移动物预测方法以及假想活动物预测方法 |
| DE102012210202A1 (de) * | 2012-06-18 | 2013-12-19 | Bayerische Motoren Werke Aktiengesellschaft | Schutz von verletzlichen Verkehrsteilnehmern |
| DE102013002284B4 (de) * | 2013-02-08 | 2021-04-15 | Volkswagen Ag | Verfahren zum aktiven Kollisionsschutz eines nichtmotorisierten Verkehrsteilnehmers |
| WO2014192137A1 (ja) * | 2013-05-31 | 2014-12-04 | トヨタ自動車株式会社 | 移動軌跡予測装置及び移動軌跡予測方法 |
| CN103544850B (zh) * | 2013-09-13 | 2016-01-20 | 中国科学技术大学苏州研究院 | 车联网中基于车间距离概率分布的碰撞预测方法 |
| CN103693040B (zh) * | 2013-12-10 | 2016-04-13 | 金陵科技学院 | 一种基于双模式协作的车辆避撞系统 |
-
2014
- 2014-09-23 DE DE102014219148.3A patent/DE102014219148A1/de not_active Withdrawn
-
2015
- 2015-07-30 JP JP2017534881A patent/JP2017535008A/ja active Pending
- 2015-07-30 US US15/513,210 patent/US10127815B2/en not_active Expired - Fee Related
- 2015-07-30 CN CN201580051436.6A patent/CN107077781A/zh active Pending
- 2015-07-30 EP EP15752951.2A patent/EP3198579A1/de not_active Withdrawn
- 2015-07-30 WO PCT/EP2015/067517 patent/WO2016045832A1/de active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007160076A (ja) * | 2005-11-15 | 2007-06-28 | Univ Nihon | 人の姿勢動作判別装置およびエネルギー消費量算出装置 |
| JP2008217429A (ja) * | 2007-03-05 | 2008-09-18 | Ntt Docomo Inc | 歩行者情報提供装置、歩行者情報提供システム、及び歩行者情報提供方法 |
| JP2010102437A (ja) * | 2008-10-22 | 2010-05-06 | Toyota Central R&D Labs Inc | 歩行者飛び出し予測装置及びプログラム |
| JP2012513651A (ja) * | 2008-12-23 | 2012-06-14 | コンテイネンタル・セイフテイ・エンジニヤリング・インターナシヨナル・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 車両と生物との衝突確率を求める方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11131749B2 (en) | 2016-12-14 | 2021-09-28 | Robert Bosch Gmbh | MIMO radar sensor for motor vehicles |
| JP2019187797A (ja) * | 2018-04-25 | 2019-10-31 | Joyson Safety Systems Japan株式会社 | 背負い型エアバッグ装置及びエアバッグシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107077781A (zh) | 2017-08-18 |
| EP3198579A1 (de) | 2017-08-02 |
| DE102014219148A1 (de) | 2016-03-24 |
| WO2016045832A1 (de) | 2016-03-31 |
| US20170309178A1 (en) | 2017-10-26 |
| US10127815B2 (en) | 2018-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017535008A (ja) | 道路交通利用者の移動モデルを形成するための方法及び装置 | |
| JP2017527939A (ja) | 交通区域を監視する方法及び装置 | |
| US10169991B2 (en) | Proximity awareness system for motor vehicles | |
| US20180090005A1 (en) | Method And Apparatus For Vulnerable Road User Incidence Avoidance | |
| EP2700032B1 (en) | A comprehensive and intelligent system for managing traffic and emergency services | |
| KR101511858B1 (ko) | 보행자 또는 이륜차를 인지하는 운전보조시스템 및 그 제어방법 | |
| KR20190101909A (ko) | 위험물 감지를 위한 차량용 레이더 시스템 | |
| US11878711B2 (en) | Method of sharing and using sensor data | |
| EP2846172A1 (en) | Warning system and method | |
| US11007929B2 (en) | Multimodal vehicle-to-pedestrian notification system | |
| WO2016126318A1 (en) | Method of automatically controlling an autonomous vehicle based on cellular telephone location information | |
| JP2006039698A (ja) | 車両用物体検知装置 | |
| JP2006024103A (ja) | 車両の走行支援装置 | |
| JP2008046761A (ja) | 移動体画像処理システム、装置及び方法 | |
| JP5988724B2 (ja) | 運転支援システム、運転支援装置および携帯端末 | |
| Wang et al. | A vru collision warning system with kalman-filter-based positioning accuracy improvement | |
| Sreevishakh et al. | A Review Paper on Automotive Crash Prediction and Notiication Technologies | |
| JP2023054310A (ja) | 通知装置、第1観察装置、通知方法、制御装置及び制御方法 | |
| WO2023012671A1 (en) | Vulnerable road user (vru) collision avoidance system | |
| JP5354193B2 (ja) | 車両用運転支援装置 | |
| WO2017137987A1 (en) | A system and methods thereof using gnss signals and reflections thereof to alert of potential collision between moving objects | |
| JP2017010130A (ja) | 歩行者用衝突警告システム | |
| WO2022244372A1 (ja) | 環境状態通知装置、環境状態通知方法及びプログラム | |
| WO2019124105A1 (ja) | 情報処理装置、移動体、及び、情報処理システム | |
| JP2021535519A (ja) | 拡張現実dsrcデータ可視化 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180312 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190128 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190712 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191029 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20200207 |