JP2017504496A - マニピュレータユニットを有するデバイス - Google Patents
マニピュレータユニットを有するデバイス Download PDFInfo
- Publication number
- JP2017504496A JP2017504496A JP2016567152A JP2016567152A JP2017504496A JP 2017504496 A JP2017504496 A JP 2017504496A JP 2016567152 A JP2016567152 A JP 2016567152A JP 2016567152 A JP2016567152 A JP 2016567152A JP 2017504496 A JP2017504496 A JP 2017504496A
- Authority
- JP
- Japan
- Prior art keywords
- manipulator unit
- manipulator
- base body
- unit
- contact members
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C17/00—Monitoring; Testing ; Maintaining
- G21C17/003—Remote inspection of vessels, e.g. pressure vessels
- G21C17/013—Inspection vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Plasma & Fusion (AREA)
- General Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Manipulator (AREA)
Abstract
Description
マニピュレータユニットを有するデバイス又はマニピュレータシステムは、複数の異なるタスクのために使用される。一般に、これらは、遠隔制御による動作であって、特に、作業時に個人への危険があるため、又は、オペレータが使用場所にアクセスできないため、及び/又は、そこに局所的に広がる他の危険があるために、本来の場所で直接的に個人が行うことのできない動作を伴う。こうしたシナリオは、例えば、大災害の結果として、リスクの影響を受ける又は異質な環境条件に起因する人命に対する脅威の許容できない可能性を有する領域において、例えば、崩落リスク、毒性物質、極度の温度または圧力、並びに/又はクリティカルな放射性輻射値に起因する、極度の機械的、化学的、又は物理的な危険の可能性がある事象で、起こる。
前置きで述べられ、また、特にコンパクトな設計であり、複数の比較的複雑なタスクのために可変的な方法で使用され得るデバイスを提供することが、有利には、本発明の目的である。
従属する請求項は、本発明の有利な変形に関する。
本発明は、駆動可能なマニピュレータアームを備えるマニピュレータユニットを有するデバイスに基づく。マニピュレータアームは、例えば遠隔制御によって複雑な方式で動作可能であり、また、異なる作業のために個別に装備可能である。異なる複数の機能が、例えば、マニピュレータアーム上に交換可能に存在するツールであって、被駆動式で作動するツールによって、マニピュレータアームで実現され得る。
昇降装置に加えて、デバイスは、マニピュレータユニットを備え、マニピュレータユニットは、特に有線のエネルギー及び/又は信号供給部、並びに、結合手段を含む。マニピュレータアーム及びマニピュレータユニットの更なる要素は、以下で更により詳細に説明される。マニピュレータユニットの周りのエリアの視覚的検出のため、また、対応する画像情報を転送するため、マニピュレータユニットは、画像提供システム又はカメラを有する。
更に、昇降装置は、垂直伸長方式でぶら下がる引張り要素の長さによって、マニピュレータユニットの垂直位置を変更するために、有利には、自由に懸垂保持される引張り要素部分のモータ式の短縮及び伸長のための構成を有する。例えば、昇降装置は、ケーブルドラム等のような、引張り要素に対する巻回デバイスを有する。更に、昇降装置自体が、その空間位置を変更可能である、例えば、直線的に又は水平に移動可能であると有利である。
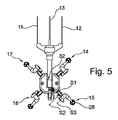
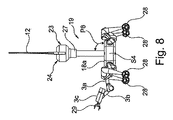
更に、結合手段が調整装置を介してマニピュレータユニットに作用することが有利である。特に、調整装置は、関節式又は傾斜型構成を備える。調整装置による調整は、好ましくは、引張り要素に自由にぶら下がるマニピュレータユニットに対して実質的に水平な軸の周りで行われる。調整装置は、重力に支援された調整を行うように、例えば、マニピュレータユニットの基礎本体の重心のシフトを意図的に実行することに基づいて調整を行うように、設計され得る。一般に、モータ式駆動が、基礎本体の重心をシフトさせるために必要であり、例えばマニピュレータアームの又は接触部材の外側等の、基礎本体の外側において関節式方式で動作する要素を広げる又は折畳むことによって基礎本体の重心をシフトさせるために必要である。
最後に、デバイスを水面下で及び/又は比較的高温で動作させるための手段が設計されることが同様に有利である。当該手段は、互いに接続されるハウジング部品の接続領域における、又は、マニピュレータアーム等のハウジングに作用する構成要素からの移行部内の接続ポイントにおける、液密設計のための液密ハウジング材料又はシール構成に特に関する。耐熱性が高い材料が熱に対して使用され、前記材料は、大災害シナリオにおいて起こる可能性がある典型的な最大温度に耐性がある。
更に、適切な手段がデバイスの機械的安定性のために、特に、衝撃又は圧力の影響に対してとられる。例えば、ハウジングは、鋼材料で作られた、適した高強度外側表皮を備え得る。
本発明の更なる特徴及び利点は、本発明の図式化された例示的な実施形態を参照してより詳細に説明される。
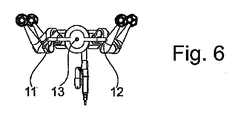
昇降装置7は、ロープ引張り型装置として設計され、ロープ及びケーブルドラム(明示されない)を有するハウジング10aを有する走行式キャリッジ10を備え、ロープ及びケーブルドラムは、ハウジング10a内に収容され、モータ式で回転可能であり、それぞれがロープドラムに作用する2つの引張りロープ11及び12、並びに、それらの間に存在する、マニピュレータユニット2のエネルギー供給及び信号供給のための供給ケーブル13、を巻上げること及び展開することを目的としている。供給ケーブル13は、ハウジング10a内のケーブルドラムによって、引張りロープ11、12と同時に巻上げられ及び展開させられる。
図2〜4は、矢印P3及びP4に従って下降し上昇するのに有利である運搬姿勢において、テンション付けられた引張りロープ11、12上で懸垂保持されたマニピュレータユニット2を示す。図2及び3は、90°の角度だけ互いに対して回転した側面図を示し、図4は、上から斜めの斜視図を示す。基礎本体18の平坦な主側面又は主平面18aは、テンション付けられた引張りロープ11及び12に平行に、ここでは垂直に配向される(図2参照)。
Claims (12)
- 駆動可能なマニピュレータアーム(3)を備えるマニピュレータユニット(2)を有するデバイス(1)であって、フレキシブルな引張り要素(11,12)を有する昇降装置(7)が存在し、前記昇降装置上で、前記マニピュレータユニット(2)が、懸垂保持式方式で下降可能及び/又は上昇可能であり、前記フレキシブル引張り要素(11,12)と前記マニピュレータユニット(2)の基礎本体(18)との間で作用する結合手段(19)が、前記引張り要素(11,12)に前記マニピュレータユニット(2)が懸垂保持された状態において、前記基礎本体(18)を予め規定された空間配向にセットするために前記基礎本体(18)を調整可能に存在することを特徴とするデバイス。
- 前記マニピュレータユニット(2)の主平面(18a)を調整可能である、特には、チルト運動によって垂直配向から水平配向に傾斜可能であることを特徴とする請求項1に記載のデバイス。
- 前記結合手段(19)は、前記引張り要素(11,12)に接続される少なくとも実質的にリジッドな結合要素(22)を備えることを特徴とする請求項1又は請求項2に記載のデバイス。
- 前記結合手段(19)は、調整装置(20)を介して前記マニピュレータユニットに作用することを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 前記調整装置(20)は、前記マニピュレータユニット(2)の重心の領域に、特には、前記マニピュレータユニット(2)の前記基礎本体(18)の重心の領域に、存在することを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 被駆動式で動作可能である複数の接触部材(14〜17)が、前記マニピュレータユニット(2)上に存在することを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 接触部材(14〜17)が機能性を有するように設計されていることを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 接触部材(14〜17)上には、前記接触部材(14〜17)と係合セクション(6a)との間の保持機能を提供するための接着手段(28)が存在することを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 前記マニピュレータユニット(2)の周囲物の知覚検出のためのセンサ手段が設けられていることを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 前記昇降装置(7)に加えて、前記マニピュレータユニット(2)を囲む媒体内での前記マニピュレータユニット(2)の被駆動運動のための駆動手段(30,31)が設けられていることを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 前記マニピュレータユニット(2)の外側から内部体積への輻射の侵入を減少させる又は回避する輻射保護手段(24a)を備えることを特徴とする先行する請求項のいずれか1項に記載のデバイス。
- 水面下で、及び/又は、比較的高い高温でデバイスを動作させるための手段が構成されていることを特徴とする先行する請求項のいずれか1項に記載のデバイス。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014001074.0A DE102014001074A1 (de) | 2014-01-30 | 2014-01-30 | Vorrichtung mit einer Manipulatoreinheit |
| DE102014001074.0 | 2014-01-30 | ||
| PCT/EP2015/051904 WO2015114078A1 (de) | 2014-01-30 | 2015-01-30 | Vorrichtung mit einer manipulatoreinheit |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017504496A true JP2017504496A (ja) | 2017-02-09 |
| JP2017504496A5 JP2017504496A5 (ja) | 2018-03-08 |
| JP6720085B2 JP6720085B2 (ja) | 2020-07-08 |
Family
ID=52464374
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016567152A Active JP6720085B2 (ja) | 2014-01-30 | 2015-01-30 | マニピュレータユニットを有するデバイス |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170014992A1 (ja) |
| EP (1) | EP3099450B1 (ja) |
| JP (1) | JP6720085B2 (ja) |
| DE (1) | DE102014001074A1 (ja) |
| WO (1) | WO2015114078A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10789175B2 (en) * | 2017-06-01 | 2020-09-29 | Mellanox Technologies Ltd. | Caching policy in a multicore system on a chip (SOC) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4165254A (en) * | 1977-03-25 | 1979-08-21 | Westinghouse Electric Corp. | Pulley system including emergency locking means for nuclear reactor vessel inspection apparatus |
| JPS60201250A (ja) * | 1984-03-26 | 1985-10-11 | Mitsubishi Heavy Ind Ltd | 水中検査装置 |
| JPS62233794A (ja) * | 1986-04-04 | 1987-10-14 | 中国電力株式会社 | 原子炉圧力容器内点検装置 |
| US4883184A (en) * | 1986-05-23 | 1989-11-28 | Albus James S | Cable arrangement and lifting platform for stabilized load lifting |
| JPH0419787U (ja) * | 1990-06-05 | 1992-02-19 | ||
| JPH09311193A (ja) * | 1996-05-23 | 1997-12-02 | Toshiba Corp | 原子炉内検査装置 |
| KR20050017724A (ko) * | 2003-08-08 | 2005-02-23 | 한국원자력연구소 | 원자로 내부 검사장치 |
| JP2005300266A (ja) * | 2004-04-08 | 2005-10-27 | Toshiba Corp | 原子炉検査・補修ロボットの位置決め装置 |
| JP2005324327A (ja) * | 2005-05-27 | 2005-11-24 | Hitachi Ltd | 遠隔移動ロボット |
| US20130269585A1 (en) * | 2010-12-22 | 2013-10-17 | Samsung Heavy Ind. Co., Ltd. | Underwater moving apparatus and moving method thereof |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2004133A (en) * | 1933-03-27 | 1935-06-11 | Eugene J Romano | Maneuvering means for underwater salvage equipment |
| US3370888A (en) * | 1965-11-08 | 1968-02-27 | Skendrovic Lawrence | Furnace refractory delining apparatus |
| JP2646008B2 (ja) * | 1988-07-15 | 1997-08-25 | 日本ビソー株式会社 | 壁面作業用ロボット |
| US5179757A (en) * | 1992-03-23 | 1993-01-19 | Louis A. Grant, Inc. | Apparatus for descaling a process vessel |
| KR101259822B1 (ko) * | 2010-11-12 | 2013-04-30 | 삼성중공업 주식회사 | 선체 블록 내부 작업용 이동 장치 및 선체 블록의 내부 작업 방법 |
-
2014
- 2014-01-30 DE DE102014001074.0A patent/DE102014001074A1/de not_active Withdrawn
-
2015
- 2015-01-30 EP EP15703546.0A patent/EP3099450B1/de active Active
- 2015-01-30 WO PCT/EP2015/051904 patent/WO2015114078A1/de active Application Filing
- 2015-01-30 JP JP2016567152A patent/JP6720085B2/ja active Active
-
2016
- 2016-07-27 US US15/220,545 patent/US20170014992A1/en not_active Abandoned
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4165254A (en) * | 1977-03-25 | 1979-08-21 | Westinghouse Electric Corp. | Pulley system including emergency locking means for nuclear reactor vessel inspection apparatus |
| JPS60201250A (ja) * | 1984-03-26 | 1985-10-11 | Mitsubishi Heavy Ind Ltd | 水中検査装置 |
| JPS62233794A (ja) * | 1986-04-04 | 1987-10-14 | 中国電力株式会社 | 原子炉圧力容器内点検装置 |
| US4883184A (en) * | 1986-05-23 | 1989-11-28 | Albus James S | Cable arrangement and lifting platform for stabilized load lifting |
| JPH0419787U (ja) * | 1990-06-05 | 1992-02-19 | ||
| JPH09311193A (ja) * | 1996-05-23 | 1997-12-02 | Toshiba Corp | 原子炉内検査装置 |
| KR20050017724A (ko) * | 2003-08-08 | 2005-02-23 | 한국원자력연구소 | 원자로 내부 검사장치 |
| JP2005300266A (ja) * | 2004-04-08 | 2005-10-27 | Toshiba Corp | 原子炉検査・補修ロボットの位置決め装置 |
| JP2005324327A (ja) * | 2005-05-27 | 2005-11-24 | Hitachi Ltd | 遠隔移動ロボット |
| US20130269585A1 (en) * | 2010-12-22 | 2013-10-17 | Samsung Heavy Ind. Co., Ltd. | Underwater moving apparatus and moving method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170014992A1 (en) | 2017-01-19 |
| EP3099450B1 (de) | 2019-12-25 |
| WO2015114078A1 (de) | 2015-08-06 |
| EP3099450A1 (de) | 2016-12-07 |
| JP6720085B2 (ja) | 2020-07-08 |
| DE102014001074A1 (de) | 2015-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9464754B1 (en) | Automated mobile boom system for crawling robots | |
| ES2776458T3 (es) | Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo | |
| JP4565107B2 (ja) | アーム機構を備えた移動ロボット | |
| US9726569B2 (en) | Piping inspection robot and method of inspecting piping | |
| US8464820B2 (en) | Air cushion platform for carrying a manipulator arm and movable robot | |
| JP6252029B2 (ja) | 遠隔操作ロボットシステム | |
| TW201921906A (zh) | 植物掃描載具 | |
| WO2019100761A1 (zh) | 车载式辐射检查系统 | |
| EP3079588B1 (en) | Mobile medical imaging robot | |
| KR102108286B1 (ko) | 재난용 잭 로봇 및 그것의 제어 방법 | |
| JP6720085B2 (ja) | マニピュレータユニットを有するデバイス | |
| KR101790005B1 (ko) | 맨홀 내부 탐사 지원형 지하시설물 지도 작성 장치 | |
| WO2018211426A1 (en) | An unmanned vehicle | |
| KR20190062381A (ko) | 선박의 탱크 검사시스템 | |
| CN210119585U (zh) | 隧道地质探测器 | |
| JP2019018953A (ja) | 荷役助力装置 | |
| KR101677329B1 (ko) | 착용형 로봇 | |
| ES2962251T3 (es) | Sistema para manejar una grúa de manipulación de cargas, así como grúa de manipulación de cargas y procedimiento para manejarla | |
| JP2018043874A (ja) | 荷役助力装置 | |
| KR20160061823A (ko) | 말단장치를 구비하는 구난로봇 및 구난로봇의 인양 방법 | |
| KR102064677B1 (ko) | 다단식 풀인 승강 장치 및 그 방법 | |
| JP2013112028A (ja) | 調査用の無人走行移動体 | |
| JP2006273481A (ja) | 作業車 | |
| KR101803818B1 (ko) | 필드로봇 매니퓰레이터의 이동장치 | |
| JP6715793B2 (ja) | アシストスーツ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6720085 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |