JP2017211284A - Mobile terminal, self position estimation system using the same, server, and self position estimation method - Google Patents
Mobile terminal, self position estimation system using the same, server, and self position estimation method Download PDFInfo
- Publication number
- JP2017211284A JP2017211284A JP2016104808A JP2016104808A JP2017211284A JP 2017211284 A JP2017211284 A JP 2017211284A JP 2016104808 A JP2016104808 A JP 2016104808A JP 2016104808 A JP2016104808 A JP 2016104808A JP 2017211284 A JP2017211284 A JP 2017211284A
- Authority
- JP
- Japan
- Prior art keywords
- identification information
- unit
- self
- mobile terminal
- position estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Navigation (AREA)
Abstract
Description
この発明は、道路等の保守・点検などの維持管理を行うシステムにおいて、屋外でモバイル端末の自己位置を推定するモバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法に関するものである。 The present invention relates to a mobile terminal that estimates the self-position of a mobile terminal outdoors, a self-position estimation system using the same, a server, and a self-position estimation method in a system that performs maintenance management such as road maintenance and inspection. is there.
道路等の長大なインフラ設備の点検業務等で異常個所を見つけた場合等に自己位置を記録したい場合がある。自己位置の推定には、GPS(Global Positioning System)が利用できるが、最大10メートル程度の誤差があり、業務で必要な自己位置精度を確保できない。
このため、人工構造物の3D(three−dimensional)モデルをあらかじめ持ち、現在のカメラ映像内のオブジェクトと3Dモデルとの対応を取ることで、精度の高い撮影位置を求める手法が開示されている。(たとえば、特許文献1)
In some cases, you may want to record your location when you find an unusual part in an inspection of a large infrastructure such as a road. GPS (Global Positioning System) can be used to estimate the self-position, but there is an error of about 10 meters at the maximum, and the self-position accuracy required for business cannot be secured.
For this reason, there is disclosed a technique for obtaining a highly accurate shooting position by holding a 3D (three-dimensional) model of an artificial structure in advance and taking correspondence between an object in the current camera image and the 3D model. (For example, Patent Document 1)
従来の自己位置推定システムは、以上のように構成されているので、団地や高速道路上などの同じ形状の構造物が並ぶ場所では、構造物の形状のみでは位置を識別できず、自己位置が推定できないという問題があった。 Since the conventional self-position estimation system is configured as described above, in a place where structures of the same shape such as housing estates and highways are lined up, the position cannot be identified only by the shape of the structure, and the self-position There was a problem that it could not be estimated.
この発明は、上述のような課題を解決するためになされたものであり、位置を一意に識別できる構造物がない場所でも高精度に自己位置を推定できるモバイル端末およびこれを用いた自己位置推定システム並びにサーバおよび自己位置推定方法を得ることを目的とする。 The present invention has been made to solve the above-described problems, and a mobile terminal capable of estimating a self-position with high accuracy even in a place where there is no structure capable of uniquely identifying the position, and self-position estimation using the mobile terminal It is an object to obtain a system, a server, and a self-position estimation method.
この発明に係わるモバイル端末においては、カメラによって画像を撮影する画像撮影部、この画像撮影部により撮影された画像内の識別情報を抽出する識別情報抽出部、予め作成された位置情報を含む識別情報を有するサーバから、識別情報を取得する識別情報取得部、識別情報抽出部により抽出された識別情報と、識別情報取得部によりサーバから取得された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、およびこの識別情報比較部により対応付けられた識別情報に基づき、自己位置を推定する自己位置推定部を備えたものである。 In the mobile terminal according to the present invention, an image capturing unit that captures an image with a camera, an identification information extracting unit that extracts identification information in an image captured by the image capturing unit, and identification information including position information created in advance The identification information acquisition unit that acquires identification information from the server having the identification information, the identification information extracted by the identification information extraction unit, and the identification information acquired from the server by the identification information acquisition unit, and the identification information associated with each other An information comparison unit and a self-position estimation unit that estimates the self-position based on the identification information associated by the identification information comparison unit are provided.
この発明によれば、カメラによって画像を撮影する画像撮影部、この画像撮影部により撮影された画像内の識別情報を抽出する識別情報抽出部、予め作成された位置情報を含む識別情報を有するサーバから、識別情報を取得する識別情報取得部、識別情報抽出部により抽出された識別情報と、識別情報取得部によりサーバから取得された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、およびこの識別情報比較部により対応付けられた識別情報に基づき、自己位置を推定する自己位置推定部を備えたので、同じ形状の構造物が並ぶような場所でも高精度に自己位置を推定することができる。 According to the present invention, an image capturing unit that captures an image with a camera, an identification information extracting unit that extracts identification information in an image captured by the image capturing unit, and a server having identification information including position information created in advance. Identification information acquisition unit that acquires identification information, identification information extracted by the identification information extraction unit, and identification information comparison unit that compares the identification information acquired from the server by the identification information acquisition unit and associates both identification information And a self-position estimation unit that estimates the self-position based on the identification information associated with the identification information comparison unit, so that the self-position can be estimated with high accuracy even in a place where structures of the same shape are arranged. be able to.
実施の形態1.
以下、この発明の実施の形態1を図に基づいて説明する。
図1は、この発明の実施の形態1による自己位置推定システムを示すブロック図である。
図1において、自己位置推定システムは、通信回線により通信可能になっているモバイル端末100とサーバ200を有する。
モバイル端末100は、次のように構成されている。
カメラ110は、周辺を撮影する。画像撮影部120は、カメラ110を通じて、周辺の画像を撮影する。画面表示部130(表示部)は、カメラ映像および地図情報などを表示装置に画面表示する。
画像内識別情報抽出部140(識別情報抽出部)は、画像内に含まれる文字列等の識別情報を抽出する。識別情報取得部150は、サーバ200から指定位置の識別情報を取得する。識別情報DB160は、識別情報取得部150によって取得された識別情報を保持する。
識別情報比較部170は、画像から抽出された識別情報と、識別情報DB160が保持する識別情報とを比較し、識別情報同士の対応付けを行なう。自己位置推定部180は、識別情報比較部170により対応付けられた識別情報から自己位置を推定する。GPS受信部190は、GPS衛星より位置情報を受信する。
FIG. 1 is a block diagram showing a self-position estimation system according to
In FIG. 1, the self-position estimation system includes a
The
The
The in-image identification information extraction unit 140 (identification information extraction unit) extracts identification information such as a character string included in the image. The identification
The identification
サーバ200は、次のように構成されている。
3Dモデル生成部210は、MMS(mobile mapping system)などで計測された3D点群データから3Dモデルを生成する。3DモデルDB220は、3Dモデル生成部210により生成された3Dモデルを保持する。
3Dモデル識別情報抽出部230は、3Dモデルから文字列等の識別情報を抽出する。識別情報DB240(識別情報データベース)は、3Dモデル識別情報抽出部230により抽出された識別情報を保持する。識別情報送信部250は、モバイル端末100からの要求に応じて、識別情報を送信する。
The
The 3D
The 3D model identification
図2は、この発明の実施の形態1による自己位置推定システムのモバイル端末のハードウェア構成を示す図である。
図2において、モバイル端末100の主要なハードウェアを示す。ROM(Read Only Memory)12に格納されたソフトウェアにより、CPU(Central Processing Unit)11がRAM(Random Access Memory)13に一時的にデータを格納しつつ処理を行ない、表示装置15にカメラ映像および処理結果を表示する。識別情報DB160は、フラッシュメモリ14に格納される。
ROM12に格納されるソフトウェアは、画像撮影部120、画像内識別情報抽出部140、画面表示部130、識別情報取得部150、識別情報比較部170、自己位置推定部180およびGPS受信部190を含む。
FIG. 2 is a diagram showing a hardware configuration of the mobile terminal of the self-position estimation system according to
In FIG. 2, the main hardware of the
The software stored in the
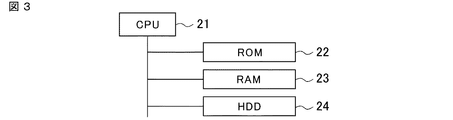
図3は、この発明の実施の形態1による自己位置推定システムのサーバのハードウェア構成を示す図である。
図3において、サーバ200の主要なハードウェアを示す。ROM22に格納されたソフトウェアにより、CPU21がRAM23に一時的にデータを格納しつつ処理を行なう。3DモデルDB220および識別情報DB240は、HDD(hard disk drive)24に格納される。
ROM22に格納されるソフトウェアは、3Dモデル生成部210、3Dモデル識別情報抽出部230および識別情報送信部250を含む。
FIG. 3 is a diagram showing a hardware configuration of the server of the self-position estimation system according to
In FIG. 3, the main hardware of the
The software stored in the
図4は、この発明の実施の形態1による自己位置推定システムの識別情報DBのデータ構造を示す図である。
図4において、識別情報DB240の各データは、識別情報と位置情報とを有する。識別情報は、文字列と、その大きさを有し、位置情報は、文字列のある看板などの緯度、経度である。
FIG. 4 is a diagram showing a data structure of the identification information DB of the self-position estimation system according to
In FIG. 4, each piece of data in the
図5は、この発明の実施の形態1による自己位置推定システムの表示画面を示す図である。
図5において、画面表示部130により表示される画面1301は、カメラ映像を表示する領域1302と、モバイル端末100の自己位置を地図上に表示する領域1303と、自己位置の緯度経度を表示する領域1304とを有する。
領域1302のカメラ映像中の識別情報の文字列で、識別情報DB160が保持する識別情報の文字列と対応付けられた文字列は、強調表示されるようになっている。
FIG. 5 is a diagram showing a display screen of the self-position estimation system according to
In FIG. 5, a
A character string associated with the character string of the identification information held in the
次に、動作について、図6、図7、図8を用いて説明する。
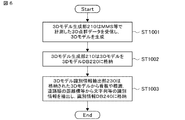
図6は、MMS等で計測された3D点群データをもとに、サーバ200内の識別情報DB240を更新するまでの流れを示す。
図7は、ユーザが指定した位置周辺の識別情報をモバイル端末100内の識別情報DB160に格納するまでの流れを示す。
図8は、現場で自己位置推定を行う際の流れを示す。
Next, the operation will be described with reference to FIG. 6, FIG. 7, and FIG.
FIG. 6 shows a flow until the
FIG. 7 shows a flow until the identification information around the position designated by the user is stored in the
FIG. 8 shows a flow when self-position estimation is performed on site.
まず、図6を用いて、MMS等で計測された3D点群データをもとに、サーバ200内の識別情報DB240を更新するまでの流れについて説明する。
サーバ200の3Dモデル生成部210は、MMS等で計測された3D点群データを受信し、3Dモデルを生成する(ステップST1001)。
3Dモデル生成部210は、生成した3Dモデルを3DモデルDB220に格納する(ステップST1002)。
3Dモデル識別情報抽出部230は、3DモデルDB220に格納された3Dモデル内の看板や標識、道路脇の距離標等から文字列等の識別情報を抽出し、図4の示すように、文字列と、その大きさと、文字列を有する看板などの位置情報とを、識別情報DB240に格納する(ステップST1003)。
First, the flow until the
The 3D
The 3D
The 3D model identification
次に、図7を用いて、ユーザが指定した位置周辺の識別情報をモバイル端末100内の識別情報DB160に格納するまでの流れ(第三のステップ)について説明する。
モバイル端末100の識別情報取得部150は、サーバ200の識別情報送信部250に、指定位置付近の識別情報を要求する(ステップST2001)。この指定位置は、GPS受信部190により受信された位置情報に基づき、指定するものとする。
識別情報送信部250は、識別情報DB240から指定された位置付近の識別情報を取得し、モバイル端末100の識別情報取得部150に送信する(ステップST2002)。
識別情報取得部150は、受信した識別情報を識別情報DB160に格納する(ステップST2003)。
Next, a flow (third step) until the identification information around the position designated by the user is stored in the
Identification
Identification
The identification
次に、図8を用いて、モバイル端末100が、現場で自己位置推定を行う際の流れについて説明する。
モバイル端末100の画像撮影部120は、カメラ110を通じて、現在の場所の画像を撮影する(ステップST3001、第一のステップ)。
画像内識別情報抽出部140は、画像から看板、標識、距離標等に描かれた文字列等の識別情報、すなわち、文字列とその大きさを抽出する(ステップST3002、第二のステップ)。
識別情報比較部170は、画像内識別情報抽出部140によって抽出された識別情報と、識別情報DB160の識別情報とを比較し、対応する識別情報DB160の識別情報を特定する(ステップST3004、第四のステップ)。特定できた場合には、画面1301のカメラ映像を表示する領域1302の該当する文字列を強調表示する。
Next, the flow when the
The
The in-image identification
The identification
自己位置推定部180は、特定された識別情報DB160の識別情報の位置情報から自己位置を推定する(ステップST3005、第五のステップ)。
このとき、画像内識別情報抽出部140によって抽出された識別情報における文字列の大きさにより、この文字列までの距離を算出する。また、複数の文字列が特定された場合には、自己位置の方向も算出される。これらにより、自己位置を推定する。
すなわち、文字列を識別情報の特定に用い、文字列の大きさを距離の算出に用い、複数の文字列で自己位置の方向も算出する。
そして、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
The self-
At this time, the distance to the character string is calculated based on the size of the character string in the identification information extracted by the in-image identification
In other words, the character string is used to specify the identification information, the size of the character string is used to calculate the distance, and the direction of the self position is also calculated using a plurality of character strings.
Then, the estimated self-position is displayed on the map of the
実施の形態1によれば、MMS等で取得した3D点群データから抽出した看板、標識、距離標等に描かれた文字列等の識別情報と、カメラ画像内の識別情報との比較により、自己位置を推定するので、同じ形状の構造物が並ぶような場所でも高精度に自己位置を推定できるという効果がある。
According to
実施の形態2.
図9は、この発明の実施の形態2による自己位置推定システムを示すブロック図である。
図9において、100〜250は図1におけるものと同一のものである。図9では、モバイル端末100に、マンホールを検出することで、自己位置を推定する自己位置推定補完部181を設けている。
FIG. 9 is a block diagram showing a self-position estimation system according to
In FIG. 9,
実施の形態2は、実施の形態1に対し、図9に示すように、マンホールを検出することで、自己位置を推定する自己位置推定補完部181を追加したものである。
In the second embodiment, as shown in FIG. 9, a self-position
以下、実施の形態2の動作について、図10を用いて説明する。
図10は、実施の形態1の図8のフローチャートに、マンホールによる自己位置推定の補完処理を追加したものである。
図10のステップST3001、3002、3004、3005は図8における処理と同一の処理である。図10では、ステップST3002の処理の後に、識別情報を抽出できたかどうかの判断処理(ステップST3003)を追加し、抽出できなかった場合に、ステップST3101とステップST3102の処理を追加している。
Hereinafter, the operation of the second embodiment will be described with reference to FIG.
FIG. 10 is obtained by adding a self-position estimation complementary process by manholes to the flowchart of FIG. 8 of the first embodiment.
Steps ST3001, 3002, 3004, and 3005 in FIG. 10 are the same processes as those in FIG. In FIG. 10, after the process of step ST3002, a process for determining whether or not the identification information has been extracted (step ST3003) is added. When the identification information cannot be extracted, the processes of step ST3101 and step ST3102 are added.
図10で、ステップST3002の処理に次いで、識別情報が抽出できたかどうかを判断し(ステップST3003)、抽出できなかった場合に、自己位置推定補完部181は、撮影画像からマンホールを検出する(ステップST3101)。
次いで、自己位置推定補完部181は、検出したマンホールの位置及びマンホールとの距離から自己位置を推定する(ステップST3102)。自己位置推定補完部181は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
なお、マンホールは、その位置が明確になっているものとする。
In FIG. 10, after the process of step ST3002, it is determined whether or not the identification information has been extracted (step ST3003). If the identification information has not been extracted, the self-position
Next, the self-position
It is assumed that the position of the manhole is clear.
実施の形態2によれば、位置を識別できるマンホールを検出することにより、識別情報が少なく自己位置の推定が困難な場所が続いた場合でも、自己位置推定を継続できるという効果がある。 According to the second embodiment, by detecting a manhole that can identify the position, there is an effect that the self-position estimation can be continued even when the location where the identification information is small and the self-position estimation is difficult continues.
実施の形態3.
図11は、この発明の実施の形態3による自己位置推定システムを示すブロック図である。
図11において、100〜250は図1におけるものと同一のものである。図11では、モバイル端末100に、モーションステレオにより、モバイル端末100の移動量を推定する自己位置推定補完部182を設けている。
FIG. 11 is a block diagram showing a self-position estimation system according to
In FIG. 11,
実施の形態3は、実施の形態1に対し、図11に示すように、モーションステレオにより、モバイル端末100の移動方向および移動量を推定する自己位置推定補完部182を追加したものである。
In the third embodiment, as shown in FIG. 11, a self-position
以下、実施の形態3の動作について、図12を用いて説明する。
図12は、実施の形態1の図8のフローチャートに、連続するカメラ画像の変化量から移動量を推定する処理を追加したものである。
図12のステップST3001〜ステップST3005は、図10における処理と同一の処理である。図12では、ステップST3003で、識別情報を抽出できなかった場合の処理として、ステップST3201〜ステップST3203の処理を追加している。
Hereinafter, the operation of the third embodiment will be described with reference to FIG.
FIG. 12 is obtained by adding a process of estimating a movement amount from a change amount of continuous camera images to the flowchart of FIG. 8 of the first embodiment.
Steps ST3001 to ST3005 in FIG. 12 are the same processes as those in FIG. In FIG. 12, the process of step ST3201-step ST3203 is added as a process when identification information cannot be extracted by step ST3003.
図12で、ステップST3102の処理に次いで、識別情報を抽出できたかどうかを判断し(ステップST3003)、抽出できなかった場合に、自己位置推定補完部182は、連続する2枚の撮影画像から対応する特徴点を抽出する(ステップST3201)。
次いで、自己位置推定補完部182は、抽出した特徴点の変化量(差分)から、モバイル端末100の移動方向および移動量を算出する(ステップST3202)。
次に、自己位置推定補完部182は、移動前の自己位置に基づき、ステップST3202で算出された移動方向および移動量から自己位置を推定する(ステップST3203)。自己位置推定補完部182は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
In FIG. 12, it is determined whether or not the identification information has been extracted following the processing in step ST3102, and if the identification information cannot be extracted, self-position
Next, self-position
Next, self-position
実施の形態3によれば、カメラ画像内の特徴点の変化量から移動方向および移動量を算出して自己位置を推定することにより、周囲に識別情報が少なく識別情報から自己位置の推定が困難な場所が続いた場合でも、自己位置推定を継続できるという効果がある。 According to the third embodiment, it is difficult to estimate the self position from the identification information because there is little identification information around by calculating the movement direction and the movement amount from the change amount of the feature point in the camera image and estimating the self position. Even if a difficult place continues, the self-position estimation can be continued.
実施の形態4.
図13は、この発明の実施の形態4による自己位置推定システムを示すブロック図である。
図13において、100〜250は図1におけるものと同一のものである。図13では、モバイル端末100に、加速度センサ111から計測した加速度と、ジャイロセンサ112から計測した角速度をもとに、モバイル端末100の移動方向および移動量を計算し、自己位置を推定する自己位置推定補完部183を設けている。
Embodiment 4 FIG.
FIG. 13 is a block diagram showing a self-position estimation system according to Embodiment 4 of the present invention.
In FIG. 13,
実施の形態4は、実施の形態1に対し、図13に示すように、モバイル端末100に搭載されたセンサの計測値から移動方向および移動量を推定し、自己位置を推定する自己位置推定補完部183を追加したものである。
As shown in FIG. 13, the fourth embodiment estimates the moving direction and the moving amount from the measured values of the sensors mounted on the
以下、実施の形態4の動作について、図14を用いて説明する。
図14は、実施の形態1の図8のフローチャートに、加速度センサ111から計測した加速度と、ジャイロセンサ112から計測した角速度をもとに、モバイル端末100の移動方向および移動量を計算し、自己位置を推定する処理を追加したものである。
図14のステップST3001〜ステップST3005は、図10における処理と同一の処理である。図14では、ステップST3003で、識別情報を抽出できなかった場合の処理として、ステップST3301とステップST3302の処理を追加している。
Hereinafter, the operation of the fourth embodiment will be described with reference to FIG.
FIG. 14 is a flow chart of FIG. 8 according to the first embodiment, which calculates the moving direction and moving amount of the
Steps ST3001 to ST3005 in FIG. 14 are the same processes as those in FIG. In FIG. 14, steps ST3301 and ST3302 are added as processing when identification information cannot be extracted in step ST3003.
図14で、ステップST3102の処理に次いで、識別情報を抽出できたかどうかを判断し(ステップST3003)、抽出できなかった場合に、自己位置推定補完部183は、加速度センサ111から加速度、ジャイロセンサ112から角速度を計測し、モバイル端末100の移動方向および移動量を算出する(ステップST3301)。
次いで、自己位置推定補完部183は、移動前の自己位置に基づき、算出した移動方向および移動量から自己位置を推定する(ステップST3302)。自己位置推定補完部183は、推定した自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
In FIG. 14, it is determined whether or not the identification information has been extracted following the process of step ST3102 (step ST3003). If the identification information cannot be extracted, the self-position
Next, self-position
実施の形態4によれば、モバイル端末に搭載されたセンサ類の計測値から移動方向および移動量を算出し、自己位置を推定することにより、周囲に識別情報が少なく識別情報から自己位置の推定が困難な場所が続いた場合でも、自己位置推定を継続できるという効果がある。 According to the fourth embodiment, the direction of movement and the amount of movement are calculated from the measured values of the sensors mounted on the mobile terminal, and the self-position is estimated, so that there is less identification information around and the self-position is estimated from the identification information. Even when difficult locations continue, self-position estimation can be continued.
実施の形態5.
図15は、この発明の実施の形態5による自己位置推定システムを示すブロック図である。
図15において、100〜140、200〜240は図1におけるものと同一のものである。図15では、モバイル端末100に、自己位置推定をサーバ200に要求する自己位置推定要求部184を設けている。また、サーバ200に、画像から抽出した識別情報と識別情報DB240(識別情報データベース)が保持する識別情報とを比較し、識別情報の対応付けを行なう識別情報比較部260と、対応付けられた識別情報からモバイル端末100の位置を推定する端末位置推定部270とを設けている。
Embodiment 5. FIG.
FIG. 15 is a block diagram showing a self-position estimation system according to Embodiment 5 of the present invention.
In FIG. 15, 100 to 140 and 200 to 240 are the same as those in FIG. In FIG. 15, the
実施の形態5は、実施の形態1に対し、図15に示すように、識別情報比較部と自己位置推定部を、モバイル端末100からサーバ200に移動したものである。
In the fifth embodiment, as shown in FIG. 15, the identification information comparison unit and the self-position estimation unit are moved from the
以下、実施の形態5の動作について、図16を用いて説明する。
図16は、実施の形態1の図8のフローチャートに対し、カメラ画像から現在の場所の識別情報を抽出した後の識別情報の比較処理と、自己位置推定処理をサーバ200で実施する流れに変更したものである。
図16のステップST3001、ステップST3002は、図8における処理と同一の処理である。図16では、ステップST3002の次の処理として、ステップST3401〜ステップST3405の処理を追加している。このうち、ステップST3402〜ステップST3405の処理は、サーバ200の処理である。
Hereinafter, the operation of the fifth embodiment will be described with reference to FIG.
FIG. 16 differs from the flowchart of FIG. 8 of the first embodiment in that the identification information comparison process after extracting the identification information of the current location from the camera image and the self-position estimation process are executed by the
Step ST3001 and step ST3002 in FIG. 16 are the same processes as those in FIG. In FIG. 16, steps ST3401 to ST3405 are added as the next processing after step ST3002. Among these, the processing of step ST3402 to step ST3405 is processing of the
図16で、モバイル端末100の自己位置推定要求部184は、サーバ200の端末位置推定部270に、自己位置推定を要求する(ステップST3401)。このとき、自己位置推定要求部184は、画像内識別情報抽出部140によって抽出された識別情報をサーバ200の端末位置推定部270に送る。
サーバ200の端末位置推定部270は、識別情報比較部260に識別情報の比較を要求する(ステップST3402)。
識別情報比較部260は、モバイル端末100から送られた識別情報(指定された識別情報)と識別情報DB240の識別情報とを比較し、モバイル端末100から送られた識別情報に対応する識別情報DB240の識別情報を特定する(ステップST3403)。
In FIG. 16, self-position
Terminal position estimation section 270 of
The identification
端末位置推定部270は、特定された識別情報と、識別情報DB240の位置情報からモバイル端末100の位置を推定する(ステップST3404)。
次いで、端末位置推定部270は、自己位置推定要求部184に推定結果を送信する(ステップST3405)。この送信される推定結果には、画面表示部130で表示するための画面表示情報が含まれる。自己位置推定要求部184は、推定された自己位置を、画面1301の領域1303の地図上に表示するとともに、正確な緯度経度を領域1304に表示する。
Terminal position estimation section 270 estimates the position of mobile terminal 100 from the identified identification information and the position information in identification information DB 240 (step ST3404).
Next, terminal position estimation section 270 transmits the estimation result to self position estimation request section 184 (step ST3405). The estimation result to be transmitted includes screen display information to be displayed on the
実施の形態5によれば、識別情報の比較処理をサーバで行うことにより、事前にモバイル端末へのサーバの識別情報DBからの識別情報の送信が不要となることで、作業時間を削減できる効果がある。
また、演算能力の高いサーバで、識別情報比較処理を行うことで、自己位置推定時間が短縮できるという効果がある。
According to the fifth embodiment, by performing identification information comparison processing on the server, it becomes unnecessary to transmit the identification information from the server identification information DB to the mobile terminal in advance, thereby reducing the work time. There is.
Moreover, there is an effect that the self-position estimation time can be shortened by performing the identification information comparison process with a server having a high calculation capability.
なお、本発明は、その発明の範囲内において、各実施の形態を自由に組み合わせたり、各実施の形態を適宜、変形、省略することが可能である。 It should be noted that the present invention can be freely combined with each other within the scope of the invention, and each embodiment can be appropriately modified or omitted.
11 CPU、12 ROM、13 RAM、14 フラッシュメモリ、15 表示装置、
21 CPU、22 ROM、23 RAM、24 HDD、
100 モバイル端末、110 カメラ、111 加速度センサ、
112 ジャイロセンサ、120 画像撮影部、130 画面表示部、
140 画像内識別情報抽出部、150 識別情報取得部、160 識別情報DB、
170 識別情報比較部、180 自己位置推定部、181 自己位置推定補完部、
182 自己位置推定補完部、183 自己位置推定補完部、
184 自己位置推定要求部、190 GPS受信部、200 サーバ、
210 3Dモデル生成部、220 3DモデルDB、
230 3Dモデル識別情報抽出部、240 識別情報DB、250 識別情報送信部、260 識別情報比較部、270 端末位置推定部
11 CPU, 12 ROM, 13 RAM, 14 Flash memory, 15 Display device,
21 CPU, 22 ROM, 23 RAM, 24 HDD,
100 mobile terminals, 110 cameras, 111 acceleration sensors,
112 gyro sensor, 120 image capturing unit, 130 screen display unit,
140 in-image identification information extraction unit, 150 identification information acquisition unit, 160 identification information DB,
170 identification information comparison unit, 180 self-position estimation unit, 181 self-position estimation complement unit,
182 Self-position estimation complement part, 183 Self-position estimation complement part,
184 Self-position estimation requesting unit, 190 GPS receiving unit, 200 server,
210 3D model generator, 220 3D model DB,
230 3D model identification information extraction unit, 240 identification information DB, 250 identification information transmission unit, 260 identification information comparison unit, 270 terminal position estimation unit
Claims (11)
この画像撮影部により撮影された画像内の識別情報を抽出する識別情報抽出部、
予め作成された位置情報を含む識別情報を有するサーバから、上記識別情報を取得する識別情報取得部、
上記識別情報抽出部により抽出された識別情報と、上記識別情報取得部により上記サーバから取得された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、
およびこの識別情報比較部により対応付けられた識別情報に基づき、自己位置を推定する自己位置推定部を備えたことを特徴とするモバイル端末。 An image capture unit that captures images with the camera,
An identification information extraction unit for extracting identification information in an image photographed by the image photographing unit;
An identification information acquisition unit for acquiring the identification information from a server having identification information including position information created in advance;
An identification information comparison unit that compares the identification information extracted by the identification information extraction unit with the identification information acquired from the server by the identification information acquisition unit, and associates both identification information;
And a mobile terminal comprising a self-position estimating unit that estimates the self-position based on the identification information associated with the identification information comparing unit.
および予め作成された位置情報を含む識別情報を格納した識別情報データベースを有するサーバを備えたことを特徴とする自己位置推定システム。 The mobile terminal according to any one of claims 1 to 7,
And a self-position estimation system comprising a server having an identification information database storing identification information including position information created in advance.
別途計測された3D点群データから3Dモデルを生成する3Dモデル生成部と、
この3Dモデル生成部により生成された3Dモデルから、位置情報を含む識別情報を抽出する3Dモデル識別情報抽出部とを有し、
上記識別情報データベースは、上記3Dモデル識別情報抽出部により抽出された識別情報を格納していることを特徴とする請求項8に記載の自己位置推定システム。 The server
A 3D model generation unit that generates a 3D model from separately measured 3D point cloud data;
A 3D model identification information extraction unit that extracts identification information including position information from the 3D model generated by the 3D model generation unit;
9. The self-position estimation system according to claim 8, wherein the identification information database stores identification information extracted by the 3D model identification information extraction unit.
この3Dモデル生成部により生成された3Dモデルから、位置情報を含む識別情報を抽出する3Dモデル識別情報抽出部、
この3Dモデル識別情報抽出部により抽出された識別情報を格納した識別情報データベース、
モバイル端末から送信される識別情報と、上記識別情報データベースに格納された識別情報とを比較し、両識別情報を対応付ける識別情報比較部、
およびこの識別情報比較部により対応付けられた識別情報に基づき、上記モバイル端末の位置を推定する端末位置推定部を備えたことを特徴とするサーバ。 A 3D model generation unit that generates a 3D model from separately measured 3D point cloud data;
A 3D model identification information extraction unit that extracts identification information including position information from the 3D model generated by the 3D model generation unit;
An identification information database storing identification information extracted by the 3D model identification information extraction unit;
An identification information comparison unit that compares the identification information transmitted from the mobile terminal with the identification information stored in the identification information database, and associates both identification information;
And a server comprising a terminal position estimation unit that estimates the position of the mobile terminal based on the identification information associated by the identification information comparison unit.
識別情報抽出部が、上記第一のステップにより撮影された画像内の識別情報を抽出する第二のステップ、
予め作成された位置情報を含む識別情報を有するサーバから、識別情報取得部により上記識別情報を取得する第三のステップ、
識別情報比較部が、上記第二のステップにより抽出された識別情報と、上記第三のステップにより上記サーバから取得された識別情報とを比較し、両識別情報を対応付ける第四のステップ、
および自己位置推定部が、上記第四のステップにより対応付けられた識別情報に基づき、自己位置を推定する第五のステップを含むことを特徴とする自己位置推定方法。 A first step in which the image capturing unit captures an image with the camera;
A second step in which the identification information extraction unit extracts the identification information in the image photographed in the first step;
A third step of acquiring the identification information by an identification information acquisition unit from a server having identification information including position information created in advance;
A fourth step in which the identification information comparison unit compares the identification information extracted in the second step with the identification information acquired from the server in the third step, and associates the identification information with each other;
And a self-position estimating method including a fifth step of estimating the self-position based on the identification information associated in the fourth step.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104808A JP6727032B2 (en) | 2016-05-26 | 2016-05-26 | Mobile terminal, self-position estimation system using the same, server and self-position estimation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104808A JP6727032B2 (en) | 2016-05-26 | 2016-05-26 | Mobile terminal, self-position estimation system using the same, server and self-position estimation method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017211284A true JP2017211284A (en) | 2017-11-30 |
| JP6727032B2 JP6727032B2 (en) | 2020-07-22 |
Family
ID=60475405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016104808A Active JP6727032B2 (en) | 2016-05-26 | 2016-05-26 | Mobile terminal, self-position estimation system using the same, server and self-position estimation method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6727032B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020173299A (en) * | 2019-04-09 | 2020-10-22 | エヌ・ティ・ティ・インフラネット株式会社 | Map data updating device, map data updating method, map data generation method, and map data updating program |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178497A (en) * | 1995-12-26 | 1997-07-11 | Aisin Aw Co Ltd | Navigation device for vehicle |
| JPH10320464A (en) * | 1997-05-16 | 1998-12-04 | Hitachi Ltd | Portable disaster information collection device |
| JP2008094377A (en) * | 2006-09-14 | 2008-04-24 | Toyota Motor Corp | Vehicle display device |
| JP2009180631A (en) * | 2008-01-31 | 2009-08-13 | Denso It Laboratory Inc | Navigator, navigation method and program |
| JP2009266003A (en) * | 2008-04-25 | 2009-11-12 | Hitachi Ltd | Object recognizing device and object recognizing method |
| JP2011150687A (en) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | Three-dimensional object identifying apparatus, moving body control apparatus equipped with the same, and information providing apparatus |
| JP2011227888A (en) * | 2010-03-31 | 2011-11-10 | Aisin Aw Co Ltd | Image processing system and location positioning system |
| JP2013200218A (en) * | 2012-03-26 | 2013-10-03 | Zenrin Datacom Co Ltd | Navigation device, autonomous navigation support method, and autonomous navigation support program |
-
2016
- 2016-05-26 JP JP2016104808A patent/JP6727032B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178497A (en) * | 1995-12-26 | 1997-07-11 | Aisin Aw Co Ltd | Navigation device for vehicle |
| JPH10320464A (en) * | 1997-05-16 | 1998-12-04 | Hitachi Ltd | Portable disaster information collection device |
| JP2008094377A (en) * | 2006-09-14 | 2008-04-24 | Toyota Motor Corp | Vehicle display device |
| JP2009180631A (en) * | 2008-01-31 | 2009-08-13 | Denso It Laboratory Inc | Navigator, navigation method and program |
| JP2009266003A (en) * | 2008-04-25 | 2009-11-12 | Hitachi Ltd | Object recognizing device and object recognizing method |
| JP2011150687A (en) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | Three-dimensional object identifying apparatus, moving body control apparatus equipped with the same, and information providing apparatus |
| JP2011227888A (en) * | 2010-03-31 | 2011-11-10 | Aisin Aw Co Ltd | Image processing system and location positioning system |
| JP2013200218A (en) * | 2012-03-26 | 2013-10-03 | Zenrin Datacom Co Ltd | Navigation device, autonomous navigation support method, and autonomous navigation support program |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020173299A (en) * | 2019-04-09 | 2020-10-22 | エヌ・ティ・ティ・インフラネット株式会社 | Map data updating device, map data updating method, map data generation method, and map data updating program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6727032B2 (en) | 2020-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6532412B2 (en) | Self-position estimation system, self-position estimation method, mobile terminal, server and self-position estimation program | |
| US9497581B2 (en) | Incident reporting | |
| EP3096290B1 (en) | Method and system for determining camera pose | |
| JP6950832B2 (en) | Position coordinate estimation device, position coordinate estimation method and program | |
| JP2017520063A (en) | High-speed template matching using peripheral information | |
| WO2013006534A1 (en) | Mobile augmented reality system | |
| CN101943580A (en) | Method and device for detecting distance between objects and computer program product thereof | |
| WO2016109050A1 (en) | Maintaining heatmaps using tagged visual data | |
| KR101223741B1 (en) | Measururement system for correction of image expression error | |
| JP2019078700A (en) | Information processor and information processing system | |
| KR102463698B1 (en) | System and method for building a location information database of road sign, apparatus and method for estimating location of vehicle using the same | |
| KR100878781B1 (en) | Surveying method for measuring the size and coordinate of a structure using a mobile terminal | |
| JP6165422B2 (en) | Information processing system, information processing device, server, terminal device, information processing method, and program | |
| KR20200002219A (en) | Indoor navigation apparatus and method | |
| CN107003385B (en) | Tagging visual data with wireless signal information | |
| JP6727032B2 (en) | Mobile terminal, self-position estimation system using the same, server and self-position estimation method | |
| JP5910729B2 (en) | Position determination system, position determination method, computer program, and position determination apparatus | |
| JP7075090B1 (en) | Information processing system and information processing method | |
| Jeon et al. | Design of positioning DB automatic update method using Google tango tablet for image based localization system | |
| JP6959305B2 (en) | Generation device, generation method, and generation program | |
| JP6546940B2 (en) | Orientation estimation device, photographing / map display device, method, and program | |
| KR20220166015A (en) | Apparatus for visualizing the result of detecting pothole in aerial image based on deep-learning and method thereof | |
| JP7703425B2 (en) | Measurement device, measurement system, measurement method and program | |
| US20250157070A1 (en) | Notification assistance system, notification assistance method, and computer-readable storage medium | |
| KR100878780B1 (en) | Surveying system for measuring the size and coordinates of structures using mobile terminals |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191016 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20191016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200630 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6727032 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |