JP2017195540A - 撮像装置及びその制御方法、プログラム、記憶媒体 - Google Patents
撮像装置及びその制御方法、プログラム、記憶媒体 Download PDFInfo
- Publication number
- JP2017195540A JP2017195540A JP2016085428A JP2016085428A JP2017195540A JP 2017195540 A JP2017195540 A JP 2017195540A JP 2016085428 A JP2016085428 A JP 2016085428A JP 2016085428 A JP2016085428 A JP 2016085428A JP 2017195540 A JP2017195540 A JP 2017195540A
- Authority
- JP
- Japan
- Prior art keywords
- image
- refocus
- focus
- imaging
- processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Studio Devices (AREA)
Abstract
【課題】焦点検出のキャリブレーションを行う場合に、ピントの異なる複数枚の画像を容易に取得できるようにしつつ、画像間の解像力の差を抑制する。
【解決手段】ライトフィールドデータを取得可能な撮像部と、撮像部により取得されたライトフィールドデータにリフォーカス処理を施してリフォーカス画像を生成する生成部と、ライトフィールドデータから得られるリフォーカス処理を施していない撮影画像と、リフォーカス画像との少なくとも一方に画像処理を施す画像処理部と、撮影画像とリフォーカス画像を表示する表示部と、撮影画像とリフォーカス画像とを含む複数の画像を表示部に表示させて複数の画像の中からいずれかを選択させる所定のモードにおいて、表示部に表示される撮影画像とリフォーカス画像の解像度の差を抑制する画像処理を行うように画像処理部を制御する制御部とを備える。
【選択図】 図16
【解決手段】ライトフィールドデータを取得可能な撮像部と、撮像部により取得されたライトフィールドデータにリフォーカス処理を施してリフォーカス画像を生成する生成部と、ライトフィールドデータから得られるリフォーカス処理を施していない撮影画像と、リフォーカス画像との少なくとも一方に画像処理を施す画像処理部と、撮影画像とリフォーカス画像を表示する表示部と、撮影画像とリフォーカス画像とを含む複数の画像を表示部に表示させて複数の画像の中からいずれかを選択させる所定のモードにおいて、表示部に表示される撮影画像とリフォーカス画像の解像度の差を抑制する画像処理を行うように画像処理部を制御する制御部とを備える。
【選択図】 図16
Description
本発明は、撮像装置における焦点検出の誤差を補正する技術に関するものである。
被写体に自動的に焦点を合わせる自動焦点調節装置を有する撮像装置においては、自動焦点調節装置が算出したデフォーカス量に誤差がある場合に、その誤差をキャリブレーション装置によって補正する機能が知られている。
特許文献1には、自動焦点調節装置の補正値を取得するモードとして、キャリブレーションモードを備える撮像装置が開示されている。複数の異なるフォーカスレンズ位置で画像とデフォーカス量を取得し、ユーザーが、取得された画像からジャストピントの画像を選択する。そして、選択された画像と同時に取得したデフォーカス量を補正値として記憶する。
一方、撮影レンズの射出瞳を複数の領域に瞳分割し、分割された瞳領域に応じた複数の視差画像を同時に撮影することができる撮像装置が提案されている。特許文献2には、1つのマイクロレンズに対して複数に分割された光電変換部が配置されている2次元撮像素子を備えた撮像装置が開示されている。分割された光電変換部は、1つのマイクロレンズを介して撮影レンズの射出瞳の異なる瞳部分領域からの光を受光するように構成され、瞳分割を行っている。これらの分割された光電変換部それぞれで受光した被写体光を光電変換して生成された画像信号から、分割された瞳部分領域に応じた複数の視差画像を生成することができる。
特許文献3には、フォーカスレンズを動かしながらブラケット撮影を行うことで、複数の視差画像を生成できる範囲を拡大する撮像装置が提案されている。撮影された複数の視差画像は、光強度の空間分布および角度分布情報であるLight Field(LF)データと等価である。非特許文献1には、取得されたLFデータを用いて撮像面とは異なる仮想結像面における画像を合成することで、撮影後に撮像画像の合焦位置を変更するリフォーカス技術が開示されている。
Stanford Tech Report CTSR 2005−02,1(2005)
しかしながら、上記の特許文献1に開示された従来技術では、ユーザーがピントの変化を確認できる複数枚の画像を撮影するために、レンズを動かしながら撮影する動作を繰り返し行う必要があり、撮影に時間がかかってしまう。この問題を解決するためには、ピントの変化を確認できる複数枚の画像を、非特許文献1に開示されたリフォーカス技術によって生成することも考えられる。しかし、非特許文献1に開示されたリフォーカス技術によって生成された画像は、元画像の解像力を再現できない場合があるため、元画像と比較して解像力が劣ってしまうことがある。
本発明は上述した課題に鑑みてなされたものであり、その目的は、焦点検出のキャリブレーションを行う場合に、ピントの異なる複数枚の画像を容易に取得できるようにしつつ、画像間の解像力の差を抑制することである。
本発明に係わる撮像装置は、ライトフィールドデータを取得可能な撮像手段と、前記撮像手段により取得されたライトフィールドデータにリフォーカス処理を施してリフォーカス画像を生成する生成手段と、前記ライトフィールドデータから得られるリフォーカス処理を施していない撮影画像と、前記リフォーカス画像との少なくとも一方に画像処理を施す画像処理手段と、前記撮影画像と前記リフォーカス画像を表示する表示手段と、前記撮影画像と前記リフォーカス画像とを含む複数の画像を前記表示手段に表示させて該複数の画像の中からいずれかを選択させる所定のモードにおいて、前記表示手段に表示される前記撮影画像と前記リフォーカス画像の解像度の差を抑制する画像処理を行うように前記画像処理手段を制御する制御手段と、を備えることを特徴とする。
本発明によれば、焦点検出のキャリブレーションを行う場合に、ピントの異なる複数枚の画像を容易に取得できるようにしつつ、画像間の解像力の差を抑制することが可能となる。
以下、本発明の実施形態について、添付図面を参照して詳細に説明する。
(第1の実施形態)
[全体構成]
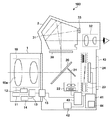
図1は、本発明の撮像装置の第1の実施形態であるデジタル一眼レフカメラのシステム構成を示す図である。図1において、カメラシステム100は、カメラ2と、カメラ2に対して着脱可能な交換レンズ1とを備えて構成される。このカメラシステム100は、位相差検出方式によるAF(オートフォーカス)処理を行う機能と、撮影後に撮像画像の合焦位置を変更したリフォーカス画像を生成する機能と、位相差検出方式による焦点検出結果の補正を行うフォーカスキャリブレーション機能とを有する。
[全体構成]
図1は、本発明の撮像装置の第1の実施形態であるデジタル一眼レフカメラのシステム構成を示す図である。図1において、カメラシステム100は、カメラ2と、カメラ2に対して着脱可能な交換レンズ1とを備えて構成される。このカメラシステム100は、位相差検出方式によるAF(オートフォーカス)処理を行う機能と、撮影後に撮像画像の合焦位置を変更したリフォーカス画像を生成する機能と、位相差検出方式による焦点検出結果の補正を行うフォーカスキャリブレーション機能とを有する。
交換レンズ1内には撮影光学系10が収容されている。撮影光学系10は、複数のレンズユニットや絞りにより構成される。また、複数のレンズユニットのうちフォーカスレンズユニット(以下、単にフォーカスレンズという)10aを光軸に沿う方向に移動させることで、ピント合わせを行うことができる。
レンズ駆動部11は、ズームレンズやフォーカスレンズ10aを移動させるアクチュエータ、及びそのアクチュエータの駆動回路、アクチュエータの駆動力を各レンズに伝達する伝達機構を含む。レンズ状態検出部12は、ズームレンズやフォーカスレンズ10aの位置、すなわちズーム位置およびフォーカス位置を検出する。
レンズ制御部13は、CPU等により構成され、後述するカメラ制御部40からの指令に応じて交換レンズ1の動作を制御する。レンズ制御部13は、電気接点15のうちの通信端子を介してカメラ制御部40と通信可能に接続される。また、交換レンズ1には、電気接点15のうちの電源端子を通じて、カメラ2から電力が供給される。レンズ記憶部14は、ROM等により構成され、レンズ制御部13での制御に用いられるデータ、交換レンズ1の識別情報、撮影光学系10の光学情報等の各種情報が記憶されている。
カメラ2において、ハーフミラーで構成された主ミラー20は、ユーザーが光学ファインダを通して被写体を観察する光学ファインダ観察時には、図示のように撮影光路内のダウン位置に配置されて撮影光学系10からの光をピント板30に向けて反射する。また、主ミラー20は、背面モニタ43にライブビュー画像を表示するライブビュー観察時や記録用画像(静止画および動画)を生成する撮影時には、撮影光路から退避するアップ位置に回動する。これにより、撮影光学系10からの光は、シャッタ23および撮像素子24に向かう。
サブミラー21は、主ミラー20とともに回動し、ダウン位置に配置された主ミラー20を透過した光をAF(オートフォーカス)センサユニット22に導く。また、主ミラー20がアップ位置に回動すると、サブミラー21も撮影光路から退避する。
AFセンサユニット22は、被写体から撮影光学系10を通り、さらにサブミラー21で反射して入射した光を用いて、カメラ2の撮影範囲内に設けられた複数の焦点検出領域において位相差検出方式による撮影光学系10の焦点状態の検出(焦点検出)を行う。AFセンサユニット22は、各焦点検出領域からの光から一対の像(被写体像)を形成する2次結像レンズと、その一対の被写体像を光電変換する一対の受光素子列が配置されたエリアセンサ(CCD又はCMOS)とを有する。エリアセンサの一対の受光素子列は、一対の被写体像の輝度分布に応じた光電変換信号である一対の像信号をカメラ制御部40に出力する。エリアセンサ上には、複数の焦点検出領域に対応した複数対の受光素子列が2次元配置されている。
カメラ制御部40は、一対の像信号の位相差を算出し、その位相差から撮影光学系10の焦点状態(デフォーカス量)を算出する。さらに、カメラ制御部40は、検出した撮影光学系10の焦点状態に基づいて、撮影光学系10を合焦させるためにフォーカスレンズ10aを移動させるべき位置である合焦位置を算出する。このような焦点検出方法を用いて自動で焦点調節することを位相差AF(オートフォーカス)と呼ぶ。
そして、カメラ制御部40は、位相差AFにより算出した合焦位置にフォーカスレンズ10aを移動させるようレンズ制御部13にフォーカス指令を送信する。レンズ制御部13は、受信したフォーカス指令に応じて、レンズ駆動部11を介してフォーカスレンズ10aを合焦位置に移動させる。これにより、撮影光学系10の合焦状態が得られる。
このようにして、位相差検出方式による焦点状態の検出と、その焦点状態に基づく合焦位置の算出と、その合焦位置へのフォーカスレンズ10aの移動とを含む位相差AFが行われる。カメラ制御部40は、フォーカス制御装置として機能する。
シャッタ23は、光学ファインダ観察時には閉じ、ライブビュー観察時および動画撮影時には開放されて撮影光学系10により形成された被写体像の撮像素子24による光電変換(ライブビュー画像および撮影動画の生成)を可能とする。さらに、静止画撮影時には、設定されたシャッタ秒時で開閉し、撮像素子24の露光を制御する。
撮像素子24は、CMOSイメージセンサ又はCCDイメージセンサとその周辺回路により構成され、撮影光学系10により形成された被写体像を光電変換してアナログ撮像信号を出力する。撮像素子24には、撮像用画素と焦点検出用画素を兼用した瞳分割機能を有する複数の画素が配置されている。これについては、後に詳しく説明する。
ピント板30は、撮像素子24と等価な位置である撮影光学系10の1次結像面に配置されている。光学ファインダ観察時には、ピント板30上に、被写体像(ファインダー像)が形成される。ペンタプリズム31は、ピント板30上に形成された被写体像を正立正像に変換する。接眼レンズ32は、正立正像をユーザーに観察させる。ピント板30、ペンタプリズム31および接眼レンズ32により光学ファインダが構成される。
AEセンサ33は、ピント板30からの光を、ペンタプリズム31を介して受光し、ピント板30上に形成された被写体像の輝度を測定する。AEセンサ33は、複数のフォトダイオードを有し、カメラ2による撮影範囲を分割するように設定された複数の測光領域のそれぞれで輝度を測定することができる。また、被写体像の輝度測定の他に、被写体像の形や色などを測定して被写体の状態を判定する被写体検知機能も備える。
カメラ制御部40は、MPU等を含むマイクロコンピュータにより構成され、カメラ2と交換レンズ1を有するカメラシステム100全体の動作を制御する。カメラ制御部40は、前述したようにフォーカス制御手段として機能するとともに、後述するAFキャリブレーション手段(本実施形態ではAFマイクロアジャストメント機能という)としても機能する。また、撮像動作を制御する撮像制御手段、信頼度判定手段、およびフォーカスブラケット撮影を行う際の撮影回数をカウントするためのカウンターとしても機能する。
デジタル信号処理部41は、撮像素子24からのアナログ撮像信号をデジタル撮像信号に変換し、さらにそのデジタル撮像信号に対して各種処理を行って画像信号(画像データ)を生成する。撮像素子24およびデジタル信号処理部41により撮像系が構成される。
デジタル信号処理部41は、撮像素子24に配置されている瞳分割用の複数の画素を用いて、位相差検出方式による焦点状態の検出を行う。さらに、デジタル信号処理部41が、検出した撮影光学系10の焦点状態に基づいて、撮影光学系10を合焦させるためにフォーカスレンズ10aを移動させるべき位置を算出することを、第2の焦点検出(以下、撮像面位相差AF(オートフォーカス))という。
デジタル信号処理部41は、撮影後に撮影画像の合焦位置を変更するリフォーカス画像生成部44を備える。リフォーカス画像生成の際に行われるリフォーカス処理については、後に詳しく説明する。また、デジタル処理部41は、撮影した画像あるいはリフォーカス画像生成部44により生成された画像に対して、画像処理を行う機能を有する。ここで言う画像処理とは、解像力を変化させるような画像処理であり、例えばエッジ強調処理やローパス処理である。
カメラ記憶部42は、カメラ制御部40やデジタル信号処理部41の動作で用いられる各種データを記憶している。また、カメラ記憶部42は、生成された記録用画像を保存する。背面モニタ43は、液晶パネル等の表示素子により構成され、ライブビュー画像、記録用画像および各種情報を表示する。
[撮像素子]
図2は、撮像素子24の画素の2次元状の配列を示した概略図である。図2に示した2列×2行の画素群200は、R(赤)の分光感度を有する画素200Rが左上に、G(緑)の分光感度を有する画素200Gが右上と左下に、B(青)の分光感度を有する画素200Bが右下に配置されている。さらに、各画素は2列×1行に配列された第1光電変換部201と第2光電変換部202により構成されており、焦点検出用画素としても機能する。
図2は、撮像素子24の画素の2次元状の配列を示した概略図である。図2に示した2列×2行の画素群200は、R(赤)の分光感度を有する画素200Rが左上に、G(緑)の分光感度を有する画素200Gが右上と左下に、B(青)の分光感度を有する画素200Bが右下に配置されている。さらに、各画素は2列×1行に配列された第1光電変換部201と第2光電変換部202により構成されており、焦点検出用画素としても機能する。
図2に示した4列×4行の画素(8列×4行の光電変換部)を撮像面上に多数配置し、画像信号及び焦点検出信号の取得を可能としている。本実施形態では、画素の周期Pが4μm、画素数Nが横5575列×縦3725行=約2075万画素、光電変換部の列方向周期PAFが2μm、光電変換部の数NAFが横11150列×縦3725行=約4150万個である撮像素子を用いるものとして説明する。
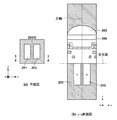
図2に示した撮像素子の1つの画素200Gを、撮像素子の受光面側(+z側)から見た平面図を図3(a)に示し、図3(a)のa−a断面を−y側から見た断面図を図3(b)に示す。
図3に示すように、画素200Gでは、各画素の受光側に入射光を集光するためのマイクロレンズ305が形成され、x方向にNH分割(2分割)、y方向にNV分割(1分割)された光電変換部201,202が配置される。光電変換部201,202は、p型層とn型層の間にイントリンシック層を挟んだpin構造フォトダイオードとしても良いし、必要に応じて、イントリンシック層を省略し、pn接合フォトダイオードとしても良い。各画素には、マイクロレンズ305と、光電変換部201,202との間に、カラーフィルタ306が形成される。また、必要に応じて、各画素毎にカラーフィルタの分光透過率を変えても良いし、カラーフィルタを省略しても良い。
図3に示した画素200Gに入射した光は、マイクロレンズ305により集光され、カラーフィルタ306で分光された後、光電変換部201,202で受光される。光電変換部201,202では、受光量に応じて電子とホールが対生成し、空乏層で分離された後、負電荷の電子はn型層(不図示)に蓄積され、一方、ホールは定電圧源(不図示)に接続されたp型層を通じて撮像素子外部へ排出される。光電変換部201,202のn型層(不図示)に蓄積された電子は、転送ゲートを介して、フローティングディフュージョン部(FD)に転送され、電圧信号に変換される。
図4は、図3に示した画素構造と瞳分割との対応関係を示した概略説明図である。図3(a)に示した画素構造のa−a断面を+y側から見た断面図と撮影光学系10の射出瞳面を図4に示す。図4では、射出瞳面の座標軸と対応を取るために、断面図のx軸とy軸を図3に対して反転させている。
図4において、第1光電変換部201に対応する第1瞳部分領域501は、重心が−x方向に偏心している第1光電変換部201の受光面と、マイクロレンズによって、概ね共役関係になっており、第1光電変換部201で受光可能な瞳領域を表している。第1光電変換部201に対応する第1瞳部分領域501は、瞳面上で重心が+X方向に偏心している。本実施形態の撮像素子24は、この構成により、光の強度とともに光の入射方向の情報を取得可能であり、いわゆるライトフィールドデータを取得可能である。
図4において、第2光電変換部202に対応する第2瞳部分領域502は、重心が+x方向に偏心している第2光電変換部202の受光面と、マイクロレンズによって、概ね共役関係になっており、第2光電変換部202で受光可能な瞳領域を表している。第2光電変換部202に対応する第2瞳部分領域502は、瞳面上で重心が−X方向に偏心している。また、図4において、瞳領域500は、第1光電変換部201と第2光電変換部202を全て合わせた場合の画素200G全体で受光可能な瞳領域である。
図5は、撮像素子と瞳分割との対応関係を示した概略図である。第1瞳部分領域501と第2瞳部分領域502の異なる瞳部分領域を通過した光束は、撮像素子の各画素にそれぞれ異なる角度で入射し、2×1分割された第1光電変換部201と第2光電変換部202で受光される。本実施形態は、瞳領域が水平方向に2つに瞳分割されている例である。必要に応じて、垂直方向に瞳分割を行っても良い。
本実施形態の撮像素子は、撮影光学系10の第1瞳部分領域501を通過する光束を受光する第1光電変換部201と、第1瞳部分領域と異なる撮影光学系10の第2瞳部分領域502を通過する光束を受光する第2光電変換部202とを有する画素が複数配列されている。第1光電変換部201と第2光電変換部202を合わせた1つの画素は、撮影光学系10の第1瞳部分領域501と第2瞳部分領域502を合わせた瞳領域を通過する光束を受光する撮像用画素として機能する。必要に応じて、撮像用画素と、第1光電変換部および第2光電変換部とを別々の画素構成とし、撮像用画素配列の一部に、第1光電変換部に対応する第1焦点検出用画素と、第2光電変換部に対応する第2焦点検出用画素を部分的に配置する構成としても良い。
本実施形態では、撮像素子の各画素の第1光電変換部201の受光信号を集めて第1焦点検出信号を生成し、各画素の第2光電変換部202の受光信号を集めて第2焦点検出信号を生成して焦点検出を行う。また、撮像素子の画素毎に、第1光電変換部201の信号と第2光電変換部202の信号を加算することで、有効画素数Nの解像度の撮像信号(画像信号)を生成する。
[デフォーカス量と像ずれ量の関係]
以下、撮像素子24により取得される第1焦点検出信号及び第2焦点検出信号に基づく像ずれ量と、デフォーカス量の関係について説明する。図6は、第1及び第2焦点検出信号に基づく像ずれ量と、デフォーカス量の概略関係を示す図である。撮像面800に撮像素子24が配置され、図4、図5と同様に、撮影光学系10の射出瞳が、第1瞳部分領域501と第2瞳部分領域502に2分割される。
以下、撮像素子24により取得される第1焦点検出信号及び第2焦点検出信号に基づく像ずれ量と、デフォーカス量の関係について説明する。図6は、第1及び第2焦点検出信号に基づく像ずれ量と、デフォーカス量の概略関係を示す図である。撮像面800に撮像素子24が配置され、図4、図5と同様に、撮影光学系10の射出瞳が、第1瞳部分領域501と第2瞳部分領域502に2分割される。
デフォーカス量dは、被写体の結像位置から撮像面800までの距離を大きさ|d|とし、被写体の結像位置が撮像面800より被写体側にある前ピン状態を負符号(d<0)、被写体の結像位置が撮像面800より被写体の反対側にある後ピン状態を正符号(d>0)で表わす。被写体の結像位置が撮像面800(合焦位置)にある合焦状態はd=0である。図6では、被写体801が合焦状態(d=0)で、被写体802が前ピン状態(d<0)である例を示している。前ピン状態(d<0)と後ピン状態(d>0)を合わせて、デフォーカス状態(|d|>0)とする。
前ピン状態(d<0)では、被写体802からの光束のうち、第1瞳部分領域501(第2瞳部分領域502)を通過した光束は、一度、集光された後、光束の重心位置G1(G2)を中心として幅Γ1(Γ2)に広がり、撮像面800でボケた像となる。ボケた像は、撮像素子に配列された各画素を構成する第1光電変換部201(第2光電変換部202)により受光され、第1焦点検出信号(第2焦点検出信号)が生成される。よって、第1焦点検出信号(第2焦点検出信号)は、撮像面800上の重心位置G1(G2)に、被写体802が幅Γ1(Γ2)にボケた画像として記録される。被写体像のボケ幅Γ1(Γ2)は、デフォーカス量dの大きさ|d|が増加するのに伴い、概ね、比例して増加していく。同様に、第1焦点検出信号と第2焦点検出信号間の被写体像の像ずれ量p(=光束の重心位置の差G1−G2)の大きさ|p|も、デフォーカス量dの大きさ|d|が増加するのに伴い、概ね、比例して増加していく。後ピン状態(d>0)でも、第1焦点検出信号と第2焦点検出信号間の被写体像の像ずれ方向が前ピン状態と反対となるが、同様である。
したがって、本実施形態では、第1焦点検出信号と第2焦点検出信号、もしくは、第1焦点検出信号と第2焦点検出信号を加算した撮像信号のデフォーカス量の大きさが増加するのに伴い、第1焦点検出信号と第2焦点検出信号間の像ずれ量の大きさが増加する。
なお、撮像面位相差AFにおいては、第1焦点検出信号と第2焦点検出信号を相対的にシフトさせて信号の一致度を表す相関量(第1評価値)を計算し、相関(信号の一致度)が良くなるシフト量から像ずれ量を検出する。撮像信号のデフォーカス量の大きさが増加するのに伴い、第1焦点検出信号と第2焦点検出信号間の像ずれ量の大きさが増加する関係性から、像ずれ量をデフォーカス量に変換して焦点検出を行う。
[リフォーカス処理]
次に、上述した撮像素子24から得られたライトフィールド(LF)データを用いたリフォーカス処理と、その場合のリフォーカス可能範囲について説明する。
次に、上述した撮像素子24から得られたライトフィールド(LF)データを用いたリフォーカス処理と、その場合のリフォーカス可能範囲について説明する。
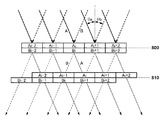
図7は、本実施形態の撮像素子により取得された第1焦点検出信号と第2焦点検出信号による1次元方向(列方向、水平方向)のリフォーカス処理の概略説明図である。図7の撮像面800は、図5、図6に示した撮像面800に対応している。図7では、iを整数として、撮像面800に配置された撮像素子の列方向i番目の画素の第1焦点検出信号をAi、第2焦点検出信号をBiで模式的に表している。第1焦点検出信号Aiは、図5の瞳部分領域501に対応して、主光線角度θaでi番目の画素に入射した光束の受光信号である。第2焦点検出信号Biは、図5の瞳部分領域502に対応して、主光線角度θbでi番目の画素に入射した光束の受光信号である。
第1焦点検出信号Aiと第2焦点検出信号Biは、光強度分布情報だけでなく、入射角度情報も有している。よって、第1焦点検出信号Aiを角度θaに沿って仮想結像面810まで平行移動させ、第2焦点検出信号Biを角度θbに沿って仮想結像面810まで平行移動させ、加算することで、仮想結像面810でのリフォーカス信号を生成できる。第1焦点検出信号Aiを角度θaに沿って仮想結像面810まで平行移動させることは、列方向に+0.5画素シフトさせることに対応する。また、第2焦点検出信号Biを角度θbに沿って仮想結像面810まで平行移動させることは、列方向に−0.5画素シフトさせることに対応する。したがって、第1焦点検出信号Aiと第2焦点検出信号Biを相対的に+1画素シフトさせ、AiとBi+1を対応させて加算することで、仮想結像面810でのリフォーカス信号を生成できる。同様に、第1焦点検出信号Aiと第2焦点検出信号Biを整数シフトさせて加算することで、整数シフト量に応じた各仮想結像面でのシフト加算信号(リフォーカス信号)を生成できる。生成されたシフト加算信号(リフォーカス信号)を用いて画像を生成することにより、仮想結像面でのリフォーカス画像を生成することができる。
本実施形態では、リフォーカス画像生成部44により、第1焦点検出信号と第2焦点検出信号に、第2フィルター処理と第2シフト処理を行い、加算してシフト加算信号を生成する。そして、生成されたシフト加算信号(リフォーカス信号)を用いて画像を生成することにより、仮想結像面でのリフォーカス画像を生成する。
[リフォーカス可能範囲]
一方、リフォーカス可能範囲には限界があるため、リフォーカス画像生成部44によって仮想結像面でのリフォーカス画像を生成できる範囲は限定される。図8は、本実施形態におけるリフォーカス可能範囲の概略説明図である。
一方、リフォーカス可能範囲には限界があるため、リフォーカス画像生成部44によって仮想結像面でのリフォーカス画像を生成できる範囲は限定される。図8は、本実施形態におけるリフォーカス可能範囲の概略説明図である。
許容錯乱円をδとし、結像光学系の絞り値をFとすると、絞り値Fでの被写界深度は±Fδである。これに対して、NH×NV(2×1)分割されて狭くなった瞳部分領域501(502)の水平方向の実効絞り値F01(F02)は、F01=NH・Fと暗くなる。第1焦点検出信号(第2焦点検出信号)毎の実効的な被写界深度は±NH・FδとNH倍深くなり、合焦範囲がNH倍に広がる。実効的な被写界深度±NH・Fδの範囲内では、第1焦点検出信号(第2焦点検出信号)毎に合焦した被写体像が取得されている。よって、図7に示した主光線角度θa(θb)に沿って第1焦点検出信号(第2焦点検出信号)を平行移動するリフォーカス処理により、撮影後に、合焦位置を再調整(リフォーカス)することができる。撮影後に合焦位置を再調整(リフォーカス)できるデフォーカス量dは限定されており、リフォーカス可能なデフォーカス量dの範囲は、概ね、式(1)の範囲である。
|d|≦NH・Fδ …(1)
許容錯乱円δは、δ=2ΔX(画素周期ΔXのナイキスト周波数1/(2ΔX)の逆数)などで規定される。必要に応じて、画素加算処理後の第1焦点検出信号(第2焦点検出信号)の周期ΔXAF(=6ΔX:6画素加算の場合)のナイキスト周波数1/(2ΔXAF)の逆数を許容錯乱円δ=2ΔXAFとしても用いても良い。シフト加算信号(リフォーカス信号)を用いて仮想結像面でのリフォーカス画像を生成する際に、許容錯乱円δを満たすリフォーカス画像を生成できる範囲は、概ね、式(1)の範囲に限定される。
[リフォーカス画像の解像力]
リフォーカス画像生成部44によってシフト加算方式で生成されたリフォーカス画像は、実撮影画像より解像力が低下する場合がある。図9は、本実施形態におけるリフォーカス画像の解像力変化を説明する図である。
許容錯乱円δは、δ=2ΔX(画素周期ΔXのナイキスト周波数1/(2ΔX)の逆数)などで規定される。必要に応じて、画素加算処理後の第1焦点検出信号(第2焦点検出信号)の周期ΔXAF(=6ΔX:6画素加算の場合)のナイキスト周波数1/(2ΔXAF)の逆数を許容錯乱円δ=2ΔXAFとしても用いても良い。シフト加算信号(リフォーカス信号)を用いて仮想結像面でのリフォーカス画像を生成する際に、許容錯乱円δを満たすリフォーカス画像を生成できる範囲は、概ね、式(1)の範囲に限定される。
[リフォーカス画像の解像力]
リフォーカス画像生成部44によってシフト加算方式で生成されたリフォーカス画像は、実撮影画像より解像力が低下する場合がある。図9は、本実施形態におけるリフォーカス画像の解像力変化を説明する図である。
図9(a)は、リフォーカス処理前の撮影画像を示している。撮像面800に撮像素子24が配置され、図8と同様に、結像光学系の射出瞳が、第1瞳部分領域501と第2瞳部分領域502に2分割される。前述したリフォーカス可能範囲の説明より、許容錯乱円をδとし、結像光学系の絞り値をFとすると、許容錯乱円δを満たす絞り値Fでの被写界深度は±Fδである。図9(a)における画像のジャストピント位置は901であり、第1瞳部分領域501(第2瞳部分領域502)を通過した光束が集光する位置である。被写体の解像力は集光された位置で最も高くなるため、リフォーカス処理前の撮影画像は、ジャストピント位置901で解像力が高くなる。
図9(b)は、図9(a)の撮影画像からリフォーカス可能範囲まで前ピン方向にリフォーカス処理した状態を示している。リフォーカス処理により、第1瞳部分領域501と第2瞳部分領域502を通過した光束がシフト加算されるため、被写界深度±Fδが前ピン方向へ移動する。しかし、リフォーカス処理により生成された画像のジャストピント位置902には、第1瞳部分領域501(第2瞳部分領域502)を通過した光束が集光されないため、撮影画像のような解像力を再現することができない。すなわち、図9(b)における画像のジャストピント位置902は、図9(a)のジャストピント位置901に比べて解像力が低い。
図9(c)は、図9(a)の撮影画像からリフォーカス可能範囲まで後ピン方向にリフォーカス処理した状態を示している。図9(b)の場合と同様に、リフォーカス処理により生成された画像のジャストピント位置903には、第1瞳部分領域501(第2瞳部分領域502)を通過した光束が集光されないため、撮影画像のような解像力を再現することができない。すなわち、図9(c)における画像のジャストピント位置903は、図9(a)のジャストピント位置901に比べて解像力が低い。
このように、シフト加算方式によるリフォーカス処理で得られたリフォーカス画像は、撮影画像と比較して解像力が低下する場合がある。そのため、撮影画像とリフォーカス画像を比較してしまうと、リフォーカス画像が被写体のジャストピント位置をとらえていたとしても、使用者にとってはジャストピントの画像に感じられない可能性がある。
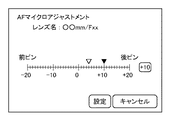
[AF(オートフォーカス)マイクロアジャストメント機能]
図10はAFマイクロアジャストメントの設定画面を示す図である。本実施形態における撮像装置はAFマイクロアジャストメント機能を有している。AFマイクロアジャストメント機能とは、ユーザーが撮影した画像に基づいて、AFセンサユニット22が検出する合焦位置と実際の合焦位置のずれ量とその方向を判断して、ユーザー自ら補正値を設定するシステムである。この補正値は、実際の撮影時(記録用画像の撮影時)に行われる位相差AFの補正に用いられる。図10に示すように、本実施形態における撮像装置のAFマイクロアジャストメントは、補正間隔をPとすると、±20Pの範囲内でAFセンサユニット22が検出する合焦位置と実際の合焦位置のずれを補正できる。図10中の0はカメラ2が工場出荷時に設定された基準位置である。
図10はAFマイクロアジャストメントの設定画面を示す図である。本実施形態における撮像装置はAFマイクロアジャストメント機能を有している。AFマイクロアジャストメント機能とは、ユーザーが撮影した画像に基づいて、AFセンサユニット22が検出する合焦位置と実際の合焦位置のずれ量とその方向を判断して、ユーザー自ら補正値を設定するシステムである。この補正値は、実際の撮影時(記録用画像の撮影時)に行われる位相差AFの補正に用いられる。図10に示すように、本実施形態における撮像装置のAFマイクロアジャストメントは、補正間隔をPとすると、±20Pの範囲内でAFセンサユニット22が検出する合焦位置と実際の合焦位置のずれを補正できる。図10中の0はカメラ2が工場出荷時に設定された基準位置である。
次に、本実施形態におけるカメラ2のAF(オートフォーカス)キャリブレーション(以下、CAL)モードについて説明する。図11は、本実施形態におけるCALモードの動作を示すフローチャートである。
ユーザーによってCALモードが選択されると、ステップS100へ進む。ステップS100では、カメラ制御部40は、不図示のレリーズスイッチの半押し操作により第1スイッチ(SW1)がONになったか否かを判定する。ONになっていない場合は待機状態になり、ONになった場合はステップS200へ進む。
ステップS200では、AFセンサユニット22による位相差AFが行われる。詳細は後述する。ステップS200の位相差AFが完了すると、ステップS300へ進む。ステップS300では、被写体情報評価値の算出を行う。AFセンサユニット22は被写体が暗いときや、コントラストが低い場合などに、焦点検出精度が低下することがある。焦点検出精度が低下するような被写体の場合には被写体情報評価値であるAF信頼性評価値は低い値となるように算出される。また、被写体情報評価値はAF信頼性評価値に限定されず、被写体の空間周波数情報や、被写体のエッジ情報(隣接画素値の差分の積分値など)の大小に応じて算出しても構わない。また、被写体情報評価値を算出するための被写体情報の検出は、AFセンサユニット22内に備えられたエリアセンサに限定されるものではなく、光学ファインダに配置されるAEセンサ33による被写体検知機能による検出でもよい。また、撮像素子24による検出であっても構わない。被写体情報評価値の算出が完了すると、ステップS400へ進む。
ステップS400では、ステップS300で算出された被写体情報評価値をもとにCALが可能かどうか判定される。例えば、被写体情報評価値であるAF信頼性評価値が高い場合、つまり、CALが可能と判定されれば、ステップS700へ進み、AF信頼性評価値が低い場合、つまり、CALが不可能と判定されれば、ステップS500へ進む。なお、AF信頼性評価値は複数の観点で算出され、複数の値が存在する。前述のように、被写体の輝度や、被写体のコントラストなど複数の観点がある。この場合には、すべてのAF信頼性評価値が所定の条件を満足するかどうかで判定してもよいし、定められたある観点での値に基づいて判定しても構わない。ステップS500では、背面モニタ43を用いて、焦点検出対象被写体はCALに不適切であることをユーザーに通知する。通知が完了すると、ステップS600へ進む。
ステップS600では、ユーザーがCALを終了するか否かを決定する。背面モニタ43上には再度CALを行うか否かの判断をユーザーに決定させるための表示を行い、ユーザーは不図示の操作ボタンを操作して再度CALを行うか否かを決定する。再度CALを行うと決定されれば、ステップS100へと戻り、CALを終了すると決定されれば、CALモードは終了する。
ステップS700では、フォーカスレンズ10aを所定量ずつ移動させてピントをずらしながら複数枚の画像を撮影するフォーカスブラケット撮影が行われる。詳細は後述する。フォーカスブラケット撮影が完了すると、ステップS800へ進む。ステップS800では、上記の複数枚の画像の中からユーザーによりピントが最も合っていると思われる画像の選択が行われる。詳細は後述する。
ステップS900では補正値の格納が行われる。ユーザーが選択した画像に関連付けられたデフォーカス量あるいはレンズ位置に対応した算出デフォーカス量に基づいて補正値が決定される。決定された補正値はカメラ記憶部42に記憶される。また、格納された補正値がユーザーに通知される。
図12は背面モニタ43が格納された補正値を表示する画面を示した図である。図12中、白抜きの三角表示はこれまでの補正値を示しており、黒塗りの三角表示は今回のキャリブレーション動作で格納される新補正値を示している。図12に示した表示を行うことにより、ユーザーはどのような補正値が格納されたかを確認することができる。補正値の格納が完了すると、CALモードを終了する。
図13は、本実施形態におけるCALモードのサブフローである位相差AFフローを示す図である。
ステップS201では、カメラ制御部40は、特定の焦点検出ラインでのデフォーカス量から合焦状態を得るために必要なフォーカスレンズ10aの移動量(移動方向を含む)を算出する。具体的には、フォーカスレンズ10aを移動させるレンズ駆動部11のアクチュエータの駆動パルス数を算出する。フォーカスレンズ10aの移動量を算出することは、合焦位置を算出することに相当する。なお、現時点でAFマイクロアジャストメント機能によって補正量が指定されている場合は、ステップS201において算出したフォーカスレンズ10aの移動量にAFマイクロアジャストメント機能により指定された補正値を加算(又は減算)し、フォーカスレンズ10aの移動量を補正する。補正値が作成されていない場合は、補正値が0になるので、フォーカスレンズ10aの移動量(合焦位置)の補正は行われない。
ステップS202では、カメラ制御部40は、補正された移動量だけフォーカスレンズ10aが移動されるようにレンズ制御部13にフォーカス指令を送信する。これにより、レンズ制御部13は、レンズ駆動部11を通じてフォーカスレンズ10aを補正された合焦位置に移動させる。なお、ステップS201において、補正前の移動量だけ(つまりは補正前の合焦位置に)フォーカスレンズ10aを移動させてもよい。そして、ステップS202において、AFマイクロアジャストメント機能に指定された補正量に相当する移動量だけフォーカスレンズ10aを再度移動させ、結果的にフォーカスレンズ10aを補正後の合焦位置に移動させるようにしてもよい。
なお、ここではAFセンサユニット22を用いた位相差AFによりフォーカスレンズ10aを移動させているが、その他のオートフォーカス手段(たとえば、撮像面位相差AF)によるものでもよい。以上、位相差AF動作が終了したら、図11のCALモードのメインフローのステップS300へ戻る。
図14は、本実施形態におけるCALモードのサブフローであるフォーカスブラケット撮影フローを示す図である。
ステップS701では、フォーカスレンズ10aの駆動量Wを決定する。図15はフォーカスブラケット撮影におけるフォーカスレンズ10aの駆動量Wおよびwと、撮影枚数Mおよびmの関係を示している。図15(a)は、従来技術によるフォーカスブラケット撮影におけるレンズ駆動量wと、撮影枚数mの関係を示す図であり、リフォーカス画像を用いずにフォーカスブラケット撮影を行う場合を示している。図15(b)は、リフォーカス画像を用いたフォーカスブラケット撮影を行う場合のレンズ駆動量Wと、撮影枚数Mの関係を示す図である。
図15(a)および図15(b)において、レンズ位置=0の位置は、図11のフロー中のステップS200の位相差AFによってフォーカスレンズ10aが駆動された後に停止した位置であり、図14のサブフローのフォーカスレンズ10aの開始位置である。レンズ駆動量Wおよびwは、前述したAFマイクロアジャストメントの補正間隔Pに係数k(係数kはk≧2の整数値)を掛けた量(kP)である。図15(b)において、フォーカスブラケット撮影で得られた撮影画像B0から、前述したリフォーカス可能範囲でリフォーカス画像B0a,B0bを生成し、フォーカスブラケット撮影で実際に撮影された画像の前後の画像を、画像処理によって生成する。そのため、レンズ駆動量Wを広く設定することができる。本実施形態では、±wに相当するデフォーカス量でリフォーカス処理を行い、リフォーカス画像を生成できる。図15(b)に示すように、撮影画像B0から、−wに相当するデフォーカス量で無限遠側へリフォーカス処理を行ったリフォーカス画像B0a(図15(a)の撮影画像A0のレンズ位置に相当)を生成することができる。同様に、+wに相当するデフォーカス量で至近側へリフォーカス処理を行ったリフォーカス画像B0b(図15(a)の撮影画像A2のレンズ位置に相当)を生成することも可能である。本実施形態では、1枚の撮影画像B0から2枚の画像B0a,B0bをリフォーカス処理により生成することができる。そのため、リフォーカス画像を用いたフォーカスブラケット撮影では、リフォーカス画像を用いない場合に比べて3倍の駆動量でレンズ駆動が可能である。つまり、W=3×wという関係になる。レンズ駆動量Wが決定したら、ステップS702へ進む。
ステップS702では、フォーカスブラケット撮影の撮影枚数Mを決定する。ステップS701でレンズ駆動量Wを広く設定することができるため、同様の理由で、リフォーカス画像を用いないブラケット撮影時より撮影枚数Mを少なく設定することができる。本実施形態では、ステップS701で説明したように、±wに相当するデフォーカス量でリフォーカス処理を行い、リフォーカス画像を生成する。そのため、1枚の撮影画像B0から2枚のリフォーカス画像B0a,B0bを生成することができ、リフォーカス画像を用いないフォーカスブラケット撮影時の3分の1の撮影枚数でよい。つまり、M=(1/3)×mという関係になる。なお、本実施形態では、撮影枚数Mはカメラによって設定されているが、ユーザーが任意に行うようにしても構わない。ユーザーのレベルに応じて可変にすることで、ユーザーに適したシステムとすることができる。また、本実施形態では撮影枚数Mとレンズ駆動量Wを変数としたが、いずれか又はその両方がカメラ2や交換レンズ1の固有値であっても構わない。撮影枚数Mが決定されたら、ステップS703へ進む。
ステップS703では、カメラ制御部40は、カウンターのリセット(カウント値n=0にする)を行う。カウンターのリセットが完了すると、ステップS704へ進む。ステップS704では、AFセンサユニット22からAF情報を取得する。ここでのAF情報とは、現在のレンズ位置で取得されたデフォーカス量などの補正値算出に使用する情報である。AF情報の取得が完了すると、ステップS705へ進む。
ステップS705では、ミラーアップ動作が行われる。主ミラー20およびサブミラー21がアップ位置に退避すると、ステップS706へ進む。ステップS706では、フォーカスレンズ10aが駆動される。図15(b)に示すようにカウント値n=0の時、フォーカスレンズ10aは−(M−(1+2n))×W/2の位置に移動する。カウント値n≧1の時、フォーカスレンズ10aは停止している位置から+Wの幅(図15(a)の3×wの幅に相当)で無限遠側に移動する。フォーカスレンズ10aの駆動が完了すると、ステップS707へ進む。
ステップS707では、静止画撮影が行われる。撮影された画像は、ステップS704で取得したAF情報やレンズ位置に関連付けられてカメラ記憶部42に記憶される。撮影画像の記録が完了すると、ステップS708へ進む。ステップS708では、ミラーダウン動作が行われる。主ミラー20およびサブミラー21がダウン位置に移動する。ミラーダウン動作が完了すると、ステップS709へ進む。
ステップS709では、カメラ制御部40に備えられたカウンターのカウント値を1つカウントアップ(n=n+1)する。カウントアップが完了すると、ステップS710へ進む。ステップS710では、カメラ制御部40に備えられたカウンターのカウント値が撮影枚数Mに達したかどうか(n=M−1)が判定される。撮影枚数Mに達していなければステップS704へと戻り、撮影枚数Mに達していれば、フォーカスブラケット撮影を終了する。以上、フォーカスブラケット撮影動作が完了したら、図11のCALモードのメインフローのステップS800へ戻る。
図16は、本実施形態におけるCALモードのサブフローである画像選択フローを示す図である。
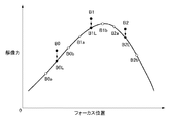
ステップS801では、リフォーカス画像生成部44によってシフト加算を行い、リフォーカス画像の生成を行う。リフォーカス画像の生成が完了したら、ステップS802へ進む。ステップS802では、フォーカスブラケット撮影により実際に撮影された画像に対して、低解像化画像処理を施す。
図17は、実際に撮影された画像に低解像化画像処理を施した場合の解像力変化を示した図である。実際に撮影された画像(B0,B1,B2)は、リフォーカス処理で生成された画像(B0a,B0b,B1a,B1b,B2a,B2b)に比べて解像力が高くなっている。そのため、低解像化画像処理によって解像力を落とす。それにより、撮影画像B0,B1,B2の解像力がB0L,B1L,B2Lで示される値に低下し、リフォーカス画像との解像力の差が解消される。低解像化画像処理は、例えば撮影画像から前後にデフォーカスさせたリフォーカス画像のコントラスト値を算出し、その2つのコントラスト値の中間値になるように解像力を落とす画像処理(ローパス処理)などが考えられる。また、リフォーカス処理による解像力の低下をテーブル化し、そのテーブルに基づいて解像力を落とすような画像処理を施してもよい。低解像化画像処理が完了したら、ステップS803へ進む。
ステップS803では、背面モニタ43によってユーザーへ画像を表示する。フォーカスブラケット撮影画像とあわせて、上記のステップS801で生成されたリフォーカス画像も表示する。表示される画像の枚数は1枚ずつでもよいし、複数枚並べて表示しても構わない。画像の表示が完了したら、ステップS804へ進む。ステップS804では、ユーザーが画像を決定したか否かが判定される。ユーザーは、表示された画像の中から最も合焦状態にあると感じる画像を選択し、決定する。それまでは待機状態となる。ユーザーが画像を決定したら、ステップS805へ進む。
ステップS805では、ステップS804で選択された画像に基づいて、補正値の算出を行う。各画像には、図14のフォーカスブラケット撮影フローのステップS704で取得されたAF情報あるいはレンズ位置から対応したデフォーカス量が算出され、補正値用の情報として関連付けられている。ユーザーが選択した画像に関連付けられたAF補正値用の情報を用いて補正値を算出し、補正値が決定される。なお、ステップS804で選択された画像がリフォーカス画像である場合には、リフォーカス画像の元となる画像のデフォーカス量とリフォーカス画像のデフォーカス量の差分を算出する。そして、リフォーカス画像の元となる撮影画像に関連付けられたデフォーカス量に加算あるいは減算した値を補正用の情報として関連付ける。その補正用の情報を用いて補正値を算出することで補正値を決定する。また、選択されたリフォーカス画像の前後の撮影画像から、デフォーカス量を補間して算出した値を補正用の情報として関連付け、そこから補正値を決定してもよい。以上、画像選択動作が完了したら、図11のCALモードのメインフローのステップS900へ戻る。
(第2の実施形態)
以下、本発明の第2の実施形態について説明する。なお、第1の実施形態と同じ構成については説明を省略し、第1の実施形態と異なる部分についてのみ説明する。
以下、本発明の第2の実施形態について説明する。なお、第1の実施形態と同じ構成については説明を省略し、第1の実施形態と異なる部分についてのみ説明する。
図18は、本発明の第2の実施形態におけるCALモードのサブフローである画像選択フローを示す図である。ステップS811では、リフォーカス画像生成部44によって水平方向へシフト加算を行い、リフォーカス画像を生成する。リフォーカス画像の生成が完了したら、ステップS812へ進む。
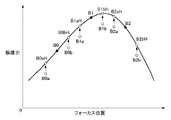
ステップS812では、フォーカスブラケットにより実際に撮影された画像から生成されたリフォーカス画像に対して、高解像化画像処理を施す。図19は、リフォーカス画像に高解像化画像処理を施した際の解像力変化を示す図である。リフォーカス処理で生成された画像(B0a,B0b,B1a,B1b,B2a,B2b)は、実際に撮影された画像(B0,B1,B2)に比べて解像力が低くなっている。そのため、高解像化画像処理によって解像力を上げる。それにより、リフォーカス画像B0a,B0b,B1a,B1b,B2a,B2bの解像力がB0aH,B0bH,B1aH,B1bH,B2aH,B2bHで示される値に向上し、リフォーカス画像との解像力の差が解消される。高解像化画像処理は、例えば、リフォーカス画像を生成する前の撮影画像のコントラスト値に合わせるような画像処理(エッジ強調)を施すことなどが考えられる。また、リフォーカス処理による解像力の低下をテーブル化し、そのテーブルに基づいて解像力を上げるように画像処理を施してもよい。高解像化画像処理が完了したら、ステップS813へ進む。
ステップS813では、背面モニタ43によってユーザーへ画像を表示する。補正値の算出については、第1の実施形態のステップS803と同様に行う。ステップS814では、ユーザーが画像を決定したか否かが判定される。ユーザーは、表示された画像の中から最も合焦状態にあると感じる画像を選択し、決定する。それまでは待機状態となる。ユーザーが画像を決定したら、ステップS815へ進む。ステップS815では、ステップS814で選択された画像に基づいて、補正値の算出を行う。補正値の算出については、第1の実施形態のステップS805と同様に行う。以上、画像選択動作が完了したら、図11のCALモードのメインフローのステップS900へ戻る。
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
例えば、上記の第1の実施形態では、撮影画像に低解像化処理を施す例を示し、第2の実施形態ではリフォーカス画像に高解像化処理を施す例を示した。しかし、本発明はこれに限定されず、撮影画像とリフォーカス画像の双方に画像処理を施してもよい。この場合は、撮影画像にある程度の低解像化処理を施し、リフォーカス画像にその足りない分を補うような高解像化処理を施すことなどが考えられる。本発明では、撮影画像とリフォーカス画像の少なくとも一方に画像処理を施すことにより、結果として撮影画像とリフォーカス画像の解像度の差を抑制して同じ程度の解像度になればよい。
(その他の実施形態)
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
10:撮影光学系、10a:フォーカスレンズ、22:AFセンサユニット、24:撮像素子、41:デジタル信号処理部、44:リフォーカス画像生成部
Claims (12)
- ライトフィールドデータを取得可能な撮像手段と、
前記撮像手段により取得されたライトフィールドデータにリフォーカス処理を施してリフォーカス画像を生成する生成手段と、
前記ライトフィールドデータから得られるリフォーカス処理を施していない撮影画像と、前記リフォーカス画像との少なくとも一方に画像処理を施す画像処理手段と、
前記撮影画像と前記リフォーカス画像を表示する表示手段と、
前記撮影画像と前記リフォーカス画像とを含む複数の画像を前記表示手段に表示させて該複数の画像の中からいずれかを選択させる所定のモードにおいて、前記表示手段に表示される前記撮影画像と前記リフォーカス画像の解像度の差を抑制する画像処理を行うように前記画像処理手段を制御する制御手段と、
を備えることを特徴とする撮像装置。 - 前記画像処理手段は、前記撮影画像に対して低解像化処理を施すことを特徴とする請求項1に記載の撮像装置。
- 前記低解像化処理は、ローパス処理であることを特徴とする請求項2に記載の撮像装置。
- 前記画像処理手段は、前記リフォーカス画像に対して高解像化処理を施すことを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
- 前記高解像化処理は、エッジ強調処理であることを特徴とする請求項4に記載の撮像装置。
- 前記表示手段に表示された前記複数の画像から、ユーザがピントが合っていると判断した画像を選択するための選択手段をさらに備えることを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
- 前記選択手段により選択された画像のピント位置に基づいて、前記撮像装置のピント位置を補正する補正手段をさらに備えることを特徴とする請求項6に記載の撮像装置。
- 前記補正手段による補正値を記憶する記憶手段をさらに備えることを特徴とする請求項7に記載の撮像装置。
- 前記撮像手段は、1つのマイクロレンズに対して複数の光電変換部を有する画素が2次元状に配置された撮像素子を有することを特徴とする請求項1乃至8のいずれか1項に記載の撮像装置。
- ライトフィールドデータを取得可能な撮像手段を備える撮像装置を制御する方法であって、
前記撮像手段により取得されたライトフィールドデータにリフォーカス処理を施してリフォーカス画像を生成する生成工程と、
前記ライトフィールドデータから得られるリフォーカス処理を施していない撮影画像と、前記リフォーカス画像との少なくとも一方に画像処理を施す画像処理工程と、
前記撮影画像と前記リフォーカス画像を表示手段に表示する表示工程と、
前記撮影画像と前記リフォーカス画像とを含む複数の画像を前記表示手段に表示させて該複数の画像の中からいずれかを選択させる所定のモードにおいて、前記表示手段に表示される前記撮影画像と前記リフォーカス画像の解像度の差を抑制する画像処理を行うように前記画像処理工程を制御する制御工程と、
を有することを特徴とする撮像装置の制御方法。 - 請求項10に記載の制御方法の各工程をコンピュータに実行させるためのプログラム。
- 請求項11に記載の制御方法の各工程をコンピュータに実行させるためのプログラムを記憶したコンピュータが読み取り可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085428A JP2017195540A (ja) | 2016-04-21 | 2016-04-21 | 撮像装置及びその制御方法、プログラム、記憶媒体 |
| US15/480,606 US20170302844A1 (en) | 2016-04-13 | 2017-04-06 | Image capturing apparatus, control method therefor, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085428A JP2017195540A (ja) | 2016-04-21 | 2016-04-21 | 撮像装置及びその制御方法、プログラム、記憶媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017195540A true JP2017195540A (ja) | 2017-10-26 |
Family
ID=60154965
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016085428A Pending JP2017195540A (ja) | 2016-04-13 | 2016-04-21 | 撮像装置及びその制御方法、プログラム、記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017195540A (ja) |
-
2016
- 2016-04-21 JP JP2016085428A patent/JP2017195540A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9826139B2 (en) | Image processing apparatus, image processing method, program, and image pickup apparatus having the image processing apparatus | |
| JP6249825B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP6376974B2 (ja) | 撮像装置及び撮像システム | |
| JP2023098917A (ja) | 撮像素子 | |
| JP2016163220A (ja) | 画像処理装置、撮像装置、画像処理方法、プログラム、および、記憶媒体 | |
| JP2022132320A (ja) | 撮像素子及び撮像装置 | |
| JP2017158018A (ja) | 画像処理装置およびその制御方法、撮像装置 | |
| JP6702669B2 (ja) | 撮像装置及びその制御方法 | |
| US20170302844A1 (en) | Image capturing apparatus, control method therefor, and storage medium | |
| JP2015194736A (ja) | 撮像装置およびその制御方法 | |
| JP2017192028A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2015210285A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP7395326B2 (ja) | レンズ装置、撮像装置、通信方法、および、プログラム | |
| JP2014142497A (ja) | 撮像装置及びその制御方法 | |
| JP6845912B2 (ja) | 撮像装置及びその制御方法 | |
| JP2015145970A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2018151508A (ja) | 撮像装置 | |
| JP6526294B2 (ja) | 撮像装置及びレンズ装置 | |
| JP2017195540A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2017219786A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP7022575B2 (ja) | 焦点検出装置および方法、および撮像装置 | |
| JP6701023B2 (ja) | 撮像装置、画像処理方法、画像処理システム、及び画像処理プログラム | |
| JP6938719B2 (ja) | 撮像装置及び撮像システム | |
| JP2015121778A (ja) | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 | |
| JP2016133595A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 |