JP2017192567A - Infusion pump - Google Patents
Infusion pump Download PDFInfo
- Publication number
- JP2017192567A JP2017192567A JP2016084708A JP2016084708A JP2017192567A JP 2017192567 A JP2017192567 A JP 2017192567A JP 2016084708 A JP2016084708 A JP 2016084708A JP 2016084708 A JP2016084708 A JP 2016084708A JP 2017192567 A JP2017192567 A JP 2017192567A
- Authority
- JP
- Japan
- Prior art keywords
- infusion
- tube
- door
- pump
- finger
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Reciprocating Pumps (AREA)
Abstract
Description
本発明は、医療用の薬液を体内に注入する場合などに用いる輸液ポンプに関する。 The present invention relates to an infusion pump used for injecting a medical solution into a body.
輸液ポンプとしては、フィンガ式(ペリスタルティック式)の輸液ポンプがある。フィンガ式の輸液ポンプは、例えば、フィンガと受け板との間に、輸液バッグに接続された輸液チューブを配置した状態で、フィンガを輸液チューブに対して進退駆動させ、フィンガにて輸液チューブを押圧することにより輸液を送り出す方式の輸液ポンプである。 As an infusion pump, there is a finger type (peristaltic type) infusion pump. The finger-type infusion pump, for example, drives the finger forward and backward with respect to the infusion tube with the infusion tube connected to the infusion bag between the finger and the receiving plate, and presses the infusion tube with the finger. This is an infusion pump that delivers the infusion by doing so.
フィンガ式の輸液ポンプとしては、フィンガで輸液チューブを完全に圧閉する方式(フルプレス方式)の輸液ポンプがある。また、フィンガで輸液チューブを完全に圧閉しない中間圧閉方式(半閉塞方式)の輸液ポンプが提案されている(例えば、特許文献1及び2参照)。半閉塞方式の輸液ポンプは、例えば、図14に示すように、輸液チューブTを完全につぶさずに送液を行う複数(3本)の送液フィンガ521・・521、及び、この送液フィンガの輸液送り方向(フィンガ配列方向:Y方向)の上流側と下流側にそれぞれ配置され、輸液チューブTの完全圧閉と開放とを行う閉塞フィンガ531,531などを備えている。なお、図14には、輸液ポンプのポンプ機構502のみを示している。
As a finger type infusion pump, there is an infusion pump of a system (full press system) in which an infusion tube is completely closed with a finger. Further, an infusion pump of an intermediate pressure closing method (semi-occlusion method) in which an infusion tube is not completely closed with a finger has been proposed (see, for example,
図14に示す輸液ポンプにおいては、ポンプ機構502の送液フィンガ521・・521及び閉塞フィンガ531,531はフィンガホルダ504に配置されている。フィンガホルダ504の前面壁540にはポンプ部チューブ溝541が設けられている。ポンプ部チューブ溝541は輸液送り方向(Y方向)に延びる矩形スリット状に形成されており、このポンプ部チューブ溝541に、送液フィンガ521・・521及び閉塞フィンガ531,531の各先端部が臨んでいる。一方、図示はしないが、輸液ポンプの扉の内側(内壁)には、当該扉を閉鎖した状態で上記ポンプ部チューブ溝541内に入り込む凸部を有する受け板が設けられている。
In the infusion pump shown in FIG. 14, the
そして、図14に示す輸液ポンプでは、ポンプ部チューブ溝541に輸液チューブTを配置した状態で扉を閉鎖することにより、送液フィンガ521・・521及び閉塞フィンガ531,531の各先端と受け板の凸部の先端(チューブ受け面)との間に輸液チューブTが配置され、この状態で、送液フィンガ521・・521及び閉塞フィンガ531,531をそれぞれ個別に駆動することにより輸液チューブT内の輸液を送液することができる。
In the infusion pump shown in FIG. 14, the tips of the
ところで、上記した輸液ポンプでは、扉を閉鎖した状態で、ポンプ部チューブ溝541内において輸液チューブTが直線状に配置されている場合には問題はない。
By the way, in the above-mentioned infusion pump, there is no problem when the infusion tube T is linearly arranged in the pump
しかしながら、扉を閉じる過程において、何らかの理由により輸液チューブTが動いてしまい、図15に示すように、輸液チューブTの一部が曲がる可能性がある。このようにポンプ部チューブ溝541内において輸液チューブTが曲がった状態になると、輸液チューブTが輸液ポンプに挟み込まれてしまう可能性があり、輸液の流量精度が低下するおそれがある。
However, in the process of closing the door, the infusion tube T moves for some reason, and there is a possibility that a part of the infusion tube T bends as shown in FIG. When the infusion tube T is bent in the pump
本発明は、このような実情を考慮してなされたもので、輸液の流量精度を確保することが可能な輸液ポンプを提供することを目的とする。 The present invention has been made in consideration of such a situation, and an object thereof is to provide an infusion pump capable of ensuring the accuracy of the infusion flow rate.
本発明は、輸液チューブを押圧する複数のフィンガを備えたポンプ機構とポンプ部チューブ溝とを有するポンプ本体と、前記ポンプ本体の輸液チューブ取付位置を開閉自在に覆う扉と、前記扉の内側(内壁)に設けられ、当該扉を閉鎖した状態で前記複数のフィンガの先端部に対向して配置される受け板とを備え、前記ポンプ部チューブ溝に輸液チューブを配置し、前記扉を閉鎖した状態で、前記各フィンガを前記輸液チューブに対して進退駆動することにより当該輸液チューブ内の輸液を送液する輸液ポンプを前提としている。 The present invention includes a pump body having a pump mechanism having a plurality of fingers for pressing an infusion tube and a pump section tube groove, a door that covers the infusion tube mounting position of the pump body in an openable and closable manner, and an inner side of the door ( And a receiving plate that is disposed to face the front ends of the plurality of fingers in a state where the door is closed, an infusion tube is disposed in the pump portion tube groove, and the door is closed. In this state, it is premised on an infusion pump that feeds the infusion in the infusion tube by driving the fingers forward and backward with respect to the infusion tube.
このような輸液ポンプにおいて、前記扉の内側であって前記受け板(ポンプ部チューブ溝)の輸液送り方向の上流側と下流側となる位置に、それぞれ、前記扉(ポンプ本体)に対して接近離反する方向に移動可能な押え板が設けられている。そして、前記各押え板のチューブ押え面は、前記扉が開放状態のときには、ばねの弾性力によって前記受け板のチューブ受け面よりも前記扉から離れる側に突出しており、前記扉が開放状態から閉じられる過程において、前記受け板のチューブ受け面よりも先に前記輸液チューブに当接するように構成されていることを特徴としている。 In such an infusion pump, the position close to the door (pump main body) is located inside the door and on the upstream side and the downstream side of the receiving plate (pump portion tube groove) in the infusion feeding direction. A presser plate that can move in the direction of separating is provided. And when the door is in the open state, the tube pressing surface of each pressing plate protrudes to the side away from the door from the tube receiving surface of the receiving plate by the elastic force of the spring, and the door is in the open state. In the process of being closed, it is configured to contact the infusion tube before the tube receiving surface of the receiving plate.
本発明によれば、扉を開放状態から閉じる過程において、上流側の押え板のチューブ押え面及び下流側の押え板のチューブ押え面が、受け板のチューブ受け面よりも先に輸液チューブに当接する。これにより、ポンプ部チューブ溝の上流側の輸液チューブ及び下流側の輸液チューブの上下方向及び左右方向の位置が固定されるので、扉を閉鎖した状態において、ポンプ部チューブ溝内の輸液チューブに曲がりが生じにくくなる。これによって輸液の流量精度を確保することが可能になる。 According to the present invention, in the process of closing the door from the open state, the tube pressing surface of the upstream pressing plate and the tube pressing surface of the downstream pressing plate contact the infusion tube before the tube receiving surface of the receiving plate. Touch. As a result, the vertical and horizontal positions of the infusion tube on the upstream side and the infusion tube on the downstream side of the pump portion tube groove are fixed, so that the infusion tube in the pump portion tube groove is bent when the door is closed Is less likely to occur. This makes it possible to ensure the flow rate accuracy of the infusion.
本発明によれば、ポンプ部チューブ溝内において輸液チューブに曲がりが生じにくくなるので、輸液の流量精度を確保することが可能になる。 According to the present invention, since the infusion tube is less likely to bend in the pump portion tube groove, it is possible to ensure the flow rate accuracy of the infusion.
以下、本発明の実施形態を図面に基づいて説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
本発明を適用する輸液ポンプの一例について図1〜図8を参照して説明する。 An example of an infusion pump to which the present invention is applied will be described with reference to FIGS.
この例の輸液ポンプ1は、半閉塞方式の輸液ポンプであって、ポンプ本体11と、このポンプ本体11の前面側(チューブ取付位置)を閉鎖する扉12とを備えている。扉12はヒンジ13,13を介してポンプ本体11に揺動自在(回転自在)に支持されており、ポンプ本体11の前面側を閉鎖(完全閉鎖)する位置から、完全開放位置(例えば、180°開く位置)までの間において揺動可能となっている。
The
ポンプ本体11及び扉12には、扉12を閉鎖したときに、その閉鎖状態を保持するための扉ロック機構14が設けられている。扉ロック機構14は、扉12側に配置のドアロックレバー141、及び、ポンプ本体11側に配置のフック142などによって構成されており、扉12を閉鎖した状態でドアロックレバー141を回動操作してフック142に引っ掛けることによって扉12を閉鎖状態にロックすることができる。
The pump
ポンプ本体11の前面壁110の中央部には矩形の開口部110aが開口されている。開口部110aには、後述するポンプ機構2のフィンガホルダ4の前面壁40が臨んでいる。
A
フィンガホルダ4の前面壁40にはポンプ部チューブ溝41が設けられている。ポンプ部チューブ溝41は、輸液送り方向(Y方向)に沿って延びる矩形スリット状に形成されており、このポンプ部チューブ溝41に、後述する送液フィンガ21・・21及び閉塞フィンガ31,31の各先端部が臨んでいる。ポンプ部チューブ溝41の溝幅は、薬液バッグに接続される輸液チューブ(例えばポリ塩化ビニルやポリブタジエン製)Tの外径(直径)よりも所定量(輸液チューブTを押しつぶした状態での全幅を考慮した量)だけ大きい幅となっている。さらに、フィンガホルダ4の前面壁40には、ポンプ部チューブ溝41を挟んだ両側に、それぞれ、輸液送り方向(Y方向)に沿って一定幅で延びる嵌合凸部42が設けられている。嵌合凸部42,42は前面壁40から前面側(扉12側)に突出している。
The
また、ポンプ本体11の前面壁110には、ポンプ部チューブ溝41の輸液送り方向(Y方向)の上流側と下流側とに、それぞれ上流側チューブ溝111と下流側チューブ溝112とが設けられている。上流側チューブ溝111の溝幅及び下流側チューブ溝112の溝幅は輸液チューブTの外径(直径)に対応する大きさとなっている。
The
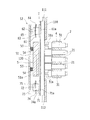
一方、扉12の内面側には受け板5が設けられている。図1及び図3に示すように、受け板5の中央には、輸液送り方向(Y方向)に沿って延びる凸部51が形成されている。凸部51は、扉12を閉鎖した状態で上記ポンプ部チューブ溝41に入り込むことが可能となっており(図3参照)、扉12の閉鎖状態で、受け板5のチューブ受け面(凸部51の先端面)51aが上記ポンプ機構2の送液フィンガ21(最後退位置の送液フィンガ21)の先端に対して所定の間隔(輸液チューブTの外径(直径)に相当する間隔)をあけて対向するようになっている(図3参照)。
On the other hand, a receiving
また、受け板5には、凸部51を挟んだ両側にそれぞれ嵌合凹部52,52が設けられており、扉12を閉鎖した状態で、嵌合凹部52,52に、フィンガホルダ4の嵌合凸部42,42が入り込むことが可能となっている(図3参照)。
Further, the receiving
受け板5は、図3及び図9等に示すように、支持ピン(小ねじ等)53・・53によって扉12の内壁120に対し接近離反自在に支持されている。また、受け板5と扉12の内壁120との間には圧縮コイルばね54・・54が挟み込まれており、輸液チューブTがポンプ機構2の送液フィンガ21によって閉塞される際に、輸液チューブTが送液フィンガ21から受ける負荷が大きすぎる場合は、受け板5が扉12の内壁120側へ後退するようなっている。これにより輸液チューブTが送液フィンガ21から受ける過負荷を軽減することができ、輸液チューブTの寿命を延ばすことができる。
As shown in FIGS. 3 and 9, the receiving
−ポンプ機構−
次に、ポンプ機構2の具体的な構成例について図4及び図5を参照して説明する。なお、図4及び図5において、各フィンガについては切断しないで表記している。
-Pump mechanism-
Next, a specific configuration example of the
ポンプ機構2は、上流側のバルブ部30A、送液部20、下流側のバルブ部30B、受け板5、及び、駆動部200などを備えている。駆動部200は、後述するように、送液部20の3つの送液フィンガ21・・21、上流側のバルブ部30A及び下流側のバルブ部30Bの閉塞フィンガ31,31の各フィンガをそれぞれ個別に進退移動(前進移動または後退移動)する。
The
<送液部>
送液部20は3つの送液フィンガ21・・21を備えている。これら3つの送液フィンガ21・・21のうち、輸液送り方向の上流側のものを第1送液フィンガ21、中流部のものを第2送液フィンガ21、下流側のものを第3送液フィンガ21と言う場合もある。なお、本実施形態において、第1送液フィンガ21と、第2送液フィンガ21と、第3送液フィンガ21とは同じ構成であるので、以下の説明では、送液フィンガ21(第1送液フィンガ21)の構成についてのみ、図4及び図5を参照して説明する。
<Liquid feeding part>
The
送液フィンガ21は、断面矩形の部材であって、ポンプ本体11の前後方向(ポンプ本体11に装着した輸液チューブTの長手方向と直交するX方向(ポンプ本体11の前面壁110と直交する方向))に沿って配置されている。送液フィンガ21は、フィンガホルダ4にスライド自在に支持されており、ポンプ本体11の前後方向(X方向)に進退移動が可能となっている。フィンガホルダ4はポンプ本体11に支持固定されている。
The
送液フィンガ21は、後述する駆動部200によって進退移動(前進移動または後退移動)され、送液フィンガ21が最後退位置にあるときには、図3、図4及び図6(A)等に示すように、送液フィンガ21の先端面21aがポンプ本体11(ポンプ部チューブ溝41)に配置された輸液チューブT(真円状態)の外周面に接触する位置(輸液チューブTの外周面に対応する位置)に配置される。また、この状態(最後退位置にある状態)から、送液フィンガ21が前進移動すると、その前進移動過程で輸液チューブTが押圧される。ここで、この例の輸液ポンプ1は半閉塞方式であるので、送液フィンガ21が最前進位置にある状態のときに、図7に示すように、輸液チューブTが完全に閉塞されないように駆動部200による送液フィンガ21の進退移動のストロークが設定されている。
The
<バルブ部>
次に、上流側のバルブ部30A及び下流側のバルブ部30Bについて図4及び図5を参照して説明する。これら上流側のバルブ部30Aと下流側のバルブ部30Bとは同じ構成であるので、以下の説明では、一方のバルブ部(上流側のバルブ部30A)についてのみ説明する。
<Valve part>
Next, the
バルブ部30A(30B)は、閉塞フィンガ31を備えている。閉塞フィンガ31は、断面矩形の部材であって、上記した送液フィンガ21と同様に、ポンプ本体11の前後方向(ポンプ本体11に装着した輸液チューブTの長手方向と直交するX方向(ポンプ本体11の前面壁110と直交する方向))に沿って配置されている。また、閉塞フィンガ31の先端部分には凸部31aが設けられている。閉塞フィンガ31は、フィンガホルダ4にスライド自在に支持されており、上記ポンプ本体11の前後方向(X方向)に進退移動が可能となっている。
The valve unit 30 </ b> A (30 </ b> B) includes a
閉塞フィンガ31は、後述する駆動部200によって進退移動(前進移動または後退移動)され、閉塞フィンガ31が最後退位置にあるときには、図4及び図6(A)等に示すように、閉塞フィンガ31の凸部31aの先端が上記ポンプ本体11に装着された輸液チューブT(真円状態)の外周面に接触する位置(輸液チューブTの外周面に対応する位置)に配置される。また、この状態(最後退位置にある状態)から、閉塞フィンガ31が前進移動すると、その前進移動過程で輸液チューブTが押圧される。ここで、バルブ部30A(30B)においては輸液チューブTを完全圧閉するので、閉塞フィンガ31が最前進位置にある状態のときに、図6(B)等に示すように輸液チューブTが完全に閉塞されるように駆動部200による閉塞フィンガ31の進退移動のストロークが設定されている。
The closing
<駆動部>
駆動部200は、図5に示すように、送液部20の送液フィンガ21・・21を個別に進退駆動するためのカム221a,221b,221c、上流側及び下流側のバルブ部30A,30Bの閉塞フィンガ31,31をそれぞれ個別に進退駆動するためのカム231a,231b、カム軸201、及び、ステッピングモータ202などを備えており、各カム221a,221b,221c,231a,231bはカム軸201に一体回転可能に取り付けられている。カム軸201は、ポンプ本体11の上下方向(送液フィンガ21・・21、閉塞フィンガ31,31の配列方向)に沿って配置されている。
<Driver>
As shown in FIG. 5, the
カム軸201の上端部にはタイミングプーリ(従動プーリ)203が一体回転可能に取り付けられている。また、ステッピングモータ202の回転軸202aにはタイミングプーリ(駆動プーリ)204が一体回転可能に設けられている。これらカム軸201のタイミングプーリ203とステッピングモータ202側のタイミングプーリ204との間にタイミングベルト205が巻き掛けられており、ステッピングモータ202の駆動によりカム軸201が回転するようになっている。
A timing pulley (driven pulley) 203 is attached to an upper end portion of the
そして、本実施形態では、上記したステッピングモータ202の駆動(カム軸201の回転)により、送液部20の送液フィンガ21・・21、上流側及び下流側のバルブ部30A,30Bの閉塞フィンガ31,31の各フィンガが、それぞれ、図6〜図8に示すような動作で進退駆動するように、カム221a,221b,221c,231a,231bのカム形状が設定されている。
In the present embodiment, the above-described driving of the stepping motor 202 (rotation of the cam shaft 201) causes the
ここで、本実施形態では、カム軸201に回転力を与える電動モータとしてステッピングモータ202を用いているので、送液の1サイクル中にカム軸201の回転速度を任意に変更することが可能である。すなわち、ステッピングモータ202は、周知のように、モータドライバに与える駆動パルスを制御(例えばデューティ制御)することにより、回転軸202aの回転速度を制御できるようになっている。したがって、ステッピングモータ202に与える駆動パルスを送液の1サイクル中に変更(駆動パルスのデューティ比を変更)することにより、その1サイクル内においてカム軸201の回転速度を任意に変更することが可能である。これによって、1サイクルの期間(時間)は同じであっても、送液の吐出期間と吸込期間との比率を可変に設定することができる)。
Here, in this embodiment, since the stepping
以上のステッピングモータ202の駆動は制御部300によって制御される。これらステッピングモータ202及び制御部300等には、輸液ポンプ1に内蔵の電池または商用電源からの電力が供給されるようになっている。
The driving of the
なお、駆動部200としては、電動モータと回転−並進機構(例えばラックアンドピニオン)とを組み合わせた機構を適用してもよいし、ソレノイドを駆動源とするものを適用してもよい。
In addition, as the
−制御部−
次に、制御部300について説明する。
-Control unit-
Next, the
制御部300は、マイクロコンピュータ等を主体として構成されており、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、不揮発性RAM、I/Oインターフェース、及び、これらの機能部を互いに接続するバスラインなどを備えている。
The
制御部300には、上記ポンプ機構2の駆動用のステッピングモータ202が接続されている。また、制御部300には、図示はしないが、操作部、気泡センサ、閉塞センサ、電源スイッチ、液晶表示部、インジケータ、及び音発生部などが接続されている。
A stepping
そして、制御部300は、操作部のイッチ類の操作にて設定された輸液の流量の設定値(設定流量)に応じて、ポンプ機構2のステッピングモータ202の回転速度を制御することにより流量を可変に調整する。この例では、流量を1mL/h〜1200mL/hの範囲内において、[1mL/h]単位で設定することができる。
Then, the
−ポンプ機構の動作説明−
次に、ポンプ機構2の動作について図6〜図8を参照して説明する。なお、図6〜図8において、各フィンガについては切断しないで表記している。
-Operation explanation of pump mechanism-
Next, the operation of the
[S1]まず、図6(A)は、輸液チューブTをポンプ本体11に装着し、扉12を閉鎖した状態(初期状態)を示す図である。この初期状態では、下流側のバルブ部30Bの閉塞フィンガ31のみが最前進位置にあり、その閉塞フィンガ31の凸部31aにて輸液チューブTが完全に閉塞されている。
[S1] First, FIG. 6A is a diagram showing a state (initial state) in which the infusion tube T is attached to the
[S2]図6(A)の状態から、上流側のバルブ部30Aの閉塞フィンガ31が前進移動し、その閉塞フィンガ31が最前進位置にまで移動した状態で、送液部20の上流側の輸液チューブTが完全に閉塞される(図6(B))。
[S2] From the state shown in FIG. 6A, the closing
[S3]図6(B)の状態から、下流側のバルブ部30Bの閉塞フィンガ31が最前進位置から後退移動し、その閉塞フィンガ31が最後退位置にまで移動した状態で、送液部20の上流側の輸液チューブTが完全に開放される(図6(C))。
[S3] From the state of FIG. 6B, the closing
[S4]図6(C)に示す状態から、送液部20の第1送液フィンガ21が前進して輸液チューブTを押圧する(図7(A))。この第1送液フィンガ21による輸液チューブTの押圧によって、輸液チューブT内の輸液が下流側に送り出される。このような第1送液フィンガ21の前進移動に続いて第2送液フィンガ21と第3送液フィンガ21とが順次前進移動し(図7(B)〜図7(C))、その各送液フィンガ21,21による輸液チューブTの押圧によって輸液チューブT内の輸液が更に下流側に送り出される。このように、この例では、3つの送液フィンガ21・・21の蠕動運動によって輸液チューブT内の輸液が送液される。ここで、この例の輸液ポンプ1は半閉塞方式であるので、送液部20の各送液フィンガ21が最前進位置に到達しても、図7(A)〜図7(C)に示すように、輸液チューブTは完全に押しつぶされない。
[S4] From the state shown in FIG. 6C, the first
[S5]図7(C)の状態から、下流側のバルブ部30Bの閉塞フィンガ31が前進移動し、その閉塞フィンガ31が最前進位置に移動した状態で送液部20の下流側の輸液チューブTが完全に閉塞される(図8)。
[S5] From the state of FIG. 7C, the closing
[S6]図8の状態から、上流側のバルブ部30Aの閉塞フィンガ31、及び、送液部20の3つの送液フィンガ21・・21が最後退位置に移動し、これら閉塞フィンガ31及び送液フィンガ21・・21の最後退位置への移動過程で輸液が吸引されて、図6(A)に示す初期状態に戻る。この図8の状態(吸込開始)から図6(B)の状態(吸込停止)までの期間が送液の吸込期間であり、図6(C)の状態(吐出開始)から図7(A)〜図7(C)の動作を経て図8の状態(吐出停止)に至るまでの期間が送液の吐出期間である。
[S6] From the state shown in FIG. 8, the closing
以上の動作で送液の1サイクルが完了し、このようなサイクルを順次繰り返していくことにより、輸液チューブT内の輸液を下流側に連続して送り出すことができる。そして、その送液流量は、上記送液サイクルの周期を制御することによって可変に調整することができる。また、上述したように、ステッピングモータ202に与える駆動パルスを送液の1サイクル内で変更することにより、その1サイクル中において送液の吐出期間と吸込期間とを可変に設定することができる。
With the above operation, one cycle of liquid feeding is completed, and by sequentially repeating such a cycle, the liquid infusion in the infusion tube T can be continuously delivered downstream. The liquid flow rate can be variably adjusted by controlling the cycle of the liquid supply cycle. Further, as described above, by changing the drive pulse applied to the stepping
−特徴部分−
次に、本実施形態の特徴部分について説明する。
-Feature part-
Next, the characteristic part of this embodiment is demonstrated.
図1及び図9〜図13に示すように、受け板5の輸液送り方向(Y方向)の上流側と下流側となる位置(ポンプ部チューブ溝41の上流側と下流側となる位置)に、それぞれ上流側の押え機構6と下流側の押え機構7とが配置されている。
As shown in FIG. 1 and FIGS. 9 to 13, the upstream side and downstream side of the receiving
上流側の押え機構6は、押え板61、止め輪63、支持金具64、及び圧縮コイルばね65などを備えている。
The
支持金具64は扉12の内壁120にねじ止めされている。支持金具64の先端部には貫通孔64aが設けられている。
The support fitting 64 is screwed to the
押え板61は、ポンプ本体11に装着された輸液チューブTを押える部材であって、円板形状に加工されている。押え板61には円柱形状の軸部62が一体形成されている。軸部62は、支持金具64の貫通孔64aにスライド自在に挿入されており、これにより、押え板61は、扉12(内壁120)に対し接近離反する方向に移動可能となっている。
The holding
また、押え板61の軸部62には、当該押え板61の移動を規制する止め輪(ストッパ)63が装着されており、この止め輪63が支持金具64に当たることにより、支持金具64に対する押え板61(チューブ押え面61a)の突出量が規定されている。
Further, a retaining ring (stopper) 63 that restricts the movement of the
そして、押え板61の軸部62と扉12の内壁120との間には圧縮コイルばね65が挟み込まれており、その圧縮コイルばね65の弾性力により、止め輪63が支持金具64に押圧された状態で当接している。この状態(押え板61に力が作用していない状態(図9の状態))で、押え板61のチューブ押え面61aが上記受け板5のチューブ受け面51aと並行になるとともに、チューブ押え面61aがチューブ受け面51aよりもポンプ本体11側(扉12の内壁120から離れる側)に所定量(例えば0.5〜5mm程度)だけ突出する位置に配置される。
A
一方、後述するように、扉12を閉じる過程において、押え板61のチューブ押え面61aが輸液チューブTに当たった時点から押え板61が扉12の内壁120側に移動し、扉12が閉鎖された状態で、押え板61のチューブ押え面61aの位置が受け板5のチューブ受け面51aの位置に一致するようになっている(図13参照)。なお、圧縮コイルばね65の弾性力は、押え板61が輸液チューブTを押しても、輸液チューブTが扁平しないように設定されている。
On the other hand, as will be described later, in the process of closing the
また、下流側の押え機構7も、上流側の押え機構6と同じ構造であり、円柱形状の軸部72が一体形成された円板形状の押え板71、軸部72に装着される止め輪73、貫通孔74aを有する支持金具74、及び圧縮コイルばね75などを備えている。
The
この下流側の押え機構7にあっても、押え板71のチューブ押え面71aが、上記受け板5のチューブ受け面51aよりもポンプ本体側(扉12の内壁120から離れる側)に所定量(例えば0.5〜5mm程度)だけ突出する位置に配置されており、後述するように、扉12を閉じる過程において、押え板71のチューブ押え面71aが輸液チューブTに当たった時点から押え板71が扉12の内壁120側に移動し、扉12が閉鎖された状態で、押え板71のチューブ押え面71aの位置が受け板5のチューブ受け面51aの位置に一致するようになっている(図13参照)。
Even in the
<作用効果>
次に、本実施形態の作用効果について図1及び図9〜図13を参照して説明する。
<Effect>
Next, the effect of this embodiment is demonstrated with reference to FIG.1 and FIGS.9-13.
まず、本実施形態の輸液ポンプ1においては、扉12を開放した状態で、薬液バッグに接続された輸液チューブTを、ポンプ本体11の下流側チューブ溝112、ポンプ部チューブ溝41及び上流側チューブ溝111に嵌め込むことによって輸液チューブTを装着する。このようなチューブ装着が完了した後に、扉12を閉鎖し、扉ロック機構14(141,142)によって扉12を閉鎖状態にロックすることにより、輸液チューブTのセッティングを完了する。
First, in the
ここで、扉12を開放状態から閉じる過程において、図12に示すように、上流側の押え板61のチューブ押え面61a及び下流側の押え板71のチューブ押え面71aが、受け板5のチューブ受け面51aよりも先に輸液チューブTに当接する。これにより、ポンプ部チューブ溝41の上流側の輸液チューブT及び下流側の輸液チューブTの上下方向及び左右方向の位置が固定される。そして、チューブ押え面61a,71aが輸液チューブTに当接した時点から、さらに扉12が閉じられると、押え板61,71が圧縮コイルばね65,75の弾性力に抗して扉12の内壁120側に移動し、扉12が閉鎖された状態で、図13に示すように、押え板61,71のチューブ押え面61a,71aの位置が受け板5のチューブ受け面51aの位置に一致するとともに、受け板5のチューブ受け面51aが輸液チューブTに接触する位置に配置される。
Here, in the process of closing the
以上のように、本実施形態によれば、扉12を閉じる過程において、上流側の押え板61のチューブ押え面61a及び下流側の押え板71のチューブ押え面71aが、受け板5のチューブ受け面51aよりも先に輸液チューブTに当接して、当該輸液チューブTの上流側及び下流側(ポンプ部チューブ溝41の上流側及び下流側)の位置が固定されるので(ポンプ部チューブ溝41内の輸液チューブTが直線状に保持されるので)、扉12を閉鎖した状態において、ポンプ部チューブ溝41内の輸液チューブTに曲がりが生じにくくなる。これにより、輸液の流量精度を確保することが可能になる。
As described above, according to the present embodiment, in the process of closing the
−他の実施形態−
なお、今回開示した実施形態は、すべての点で例示であって、限定的な解釈の根拠となるものではない。したがって、本発明の技術的範囲は、上記した実施形態のみによって解釈されるものではなく、特許請求の範囲の記載に基づいて画定される。また、本発明の技術的範囲には、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれる。
-Other embodiments-
In addition, embodiment disclosed this time is an illustration in all the points, Comprising: It does not become a basis of limited interpretation. Therefore, the technical scope of the present invention is not interpreted only by the above-described embodiments, but is defined based on the description of the scope of claims. Further, the technical scope of the present invention includes all modifications within the scope and meaning equivalent to the scope of the claims.
例えば、以上の実施形態において、輸液セットの輸液チューブに設けられたローラクランプを保持するためのクランプ保持部を、ポンプ本体11のポンプ機構2の輸液送り方向の下流側に設けるとともに、そのクランプ保持部に保持されたローラクランプのローラを移動するローラ移動手段を設け、扉ロック機構14の操作に連動して、当該扉ロック機構14がロック状態であるときにローラクランプのローラを輸液チューブTを開放する位置に配置し、扉ロック機構14が非ロック状態であるときにローラクランプのローラを前記輸液チューブを閉塞する位置に配置するという構成(特開2013−6021号公報)を採用してもよい。
For example, in the above embodiment, the clamp holding portion for holding the roller clamp provided in the infusion tube of the infusion set is provided on the downstream side of the
以上の実施形態では、送液部20に設ける送液フィンガ21の数を3つとしているが、本発明はこれに限られることなく、送液部20に設ける送液フィンガ21の数は2つまたは4つ以上であってもよい。
In the above embodiment, the number of the
以上の実施形態では、半閉塞方式の輸液ポンプ1に、本発明を適用した例を示しているが、本発明はこれに限られることなく、送液部20の送液フィンガ21によって輸液チューブTを完全に閉塞するフルプレス方式の輸液ポンプにも適用可能である。
Although the example which applied this invention to the semi-occlusion
本発明は、医療用の薬液を体内に注入する場合などに用いる輸液ポンプに利用することができる。 INDUSTRIAL APPLICATION This invention can be utilized for the infusion pump used when inject | pouring a medical chemical | medical solution into a body.
1 輸液ポンプ
11 ポンプ本体
110 前面壁
12 扉
120 内壁
2 ポンプ機構
20 送液部
21 送液フィンガ
30A 上流側のバルブ部
30B 下流側のバルブ部
31 閉塞フィンガ
4 フィンガホルダ
40 前面壁
41 ポンプ部チューブ溝
5 受け板
51 凸部
51a チューブ受け面
53 支持ピン
54 圧縮コイルばね
6,7 押え機構
61,71 押え板
61a,71a チューブ押え面
65,75 圧縮コイルばね
DESCRIPTION OF
Claims (1)
前記扉の内側であって前記受け板の輸液送り方向の上流側と下流側となる位置に、それぞれ、前記扉に対して接近離反する方向に移動可能な押え板が設けられており、
前記各押え板のチューブ押え面は、前記扉が開放状態のときには、ばねの弾性力によって前記受け板のチューブ受け面よりも前記扉から離れる側に突出しており、前記扉が開放状態から閉じられる過程において、前記受け板のチューブ受け面よりも先に前記輸液チューブに当接するように構成されていることを特徴とする輸液ポンプ。 A pump body having a pump mechanism having a plurality of fingers for pressing the infusion tube and a pump section tube groove, a door that covers the infusion tube mounting position of the pump body so as to be openable and closable, and provided inside the door. A receiving plate disposed to face the front ends of the plurality of fingers in a state in which the door is closed, an infusion tube is disposed in the tube groove of the pump unit, and each finger is in a state in which the door is closed. In an infusion pump for feeding the infusion in the infusion tube by driving back and forth with respect to the infusion tube,
A holding plate that is movable in the direction of approaching and moving away from the door is provided on the inner side of the door and on the upstream side and the downstream side in the infusion feeding direction of the receiving plate, respectively.
When the door is in the open state, the tube pressing surface of each presser plate protrudes further away from the door than the tube receiving surface of the receiving plate by the elastic force of the spring, and the door is closed from the open state. In the process, the infusion pump is configured to contact the infusion tube before the tube receiving surface of the receiving plate.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016084708A JP6825224B2 (en) | 2016-04-20 | 2016-04-20 | Infusion pump |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016084708A JP6825224B2 (en) | 2016-04-20 | 2016-04-20 | Infusion pump |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017192567A true JP2017192567A (en) | 2017-10-26 |
| JP6825224B2 JP6825224B2 (en) | 2021-02-03 |
Family
ID=60154395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016084708A Active JP6825224B2 (en) | 2016-04-20 | 2016-04-20 | Infusion pump |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6825224B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113144335A (en) * | 2021-05-26 | 2021-07-23 | 深圳中科生物医疗电子有限公司 | Infusion pump with liquid stopping clamp |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000237308A (en) * | 1999-02-22 | 2000-09-05 | Ckd Corp | Infusion pump |
| JP2005013412A (en) * | 2003-06-25 | 2005-01-20 | Terumo Corp | Peristalsis type transfusion apparatus |
| JP3140940U (en) * | 2008-01-29 | 2008-04-17 | テルモ株式会社 | Enteral infusion pump |
| JP2015019795A (en) * | 2013-07-18 | 2015-02-02 | Nkワークス株式会社 | Infusion pump |
-
2016
- 2016-04-20 JP JP2016084708A patent/JP6825224B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000237308A (en) * | 1999-02-22 | 2000-09-05 | Ckd Corp | Infusion pump |
| JP2005013412A (en) * | 2003-06-25 | 2005-01-20 | Terumo Corp | Peristalsis type transfusion apparatus |
| JP3140940U (en) * | 2008-01-29 | 2008-04-17 | テルモ株式会社 | Enteral infusion pump |
| JP2015019795A (en) * | 2013-07-18 | 2015-02-02 | Nkワークス株式会社 | Infusion pump |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113144335A (en) * | 2021-05-26 | 2021-07-23 | 深圳中科生物医疗电子有限公司 | Infusion pump with liquid stopping clamp |
| CN113144335B (en) * | 2021-05-26 | 2023-09-05 | 深圳中科生物医疗电子有限公司 | An infusion pump provided with a liquid stop clamp |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6825224B2 (en) | 2021-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6075290B2 (en) | Infusion pump | |
| WO2012161194A1 (en) | Infusion pump | |
| JP5998633B2 (en) | Infusion pump | |
| JP2008208879A (en) | Pinch valve and equipment with the pinch valve | |
| WO2015046397A1 (en) | Syringe pump | |
| JP2017192567A (en) | Infusion pump | |
| JP6567799B2 (en) | Infusion pump | |
| JP6149566B2 (en) | Infusion pump | |
| JP7244713B2 (en) | infusion pump | |
| JPWO2013161518A1 (en) | Infusion pump | |
| WO2011121924A1 (en) | Infusion pump | |
| JP2012251460A (en) | Fluid pump | |
| JP5862157B2 (en) | Infusion pump | |
| JP2012245111A (en) | Infusion pump | |
| JP6187075B2 (en) | Infusion pump | |
| JP6773038B2 (en) | Infusion pump | |
| JP6284744B2 (en) | Infusion pump | |
| JP2015021458A (en) | Infusion pump | |
| JPH11128339A (en) | Infusion pump of peristalsis type | |
| CN109432545A (en) | Chemical pump hydraulic control mechanism | |
| JP6369469B2 (en) | Infusion pump | |
| JP2012249651A (en) | Infusion pump | |
| JP7328878B2 (en) | infusion pump | |
| CN103974730B (en) | Infusion pump | |
| JP2017125479A (en) | Tube pump |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201007 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201007 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201013 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20201021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6825224 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |