以下、撮像装置の一形態について、図1を用いて説明する。この撮像装置10は、装置本体11、レンズ鏡筒12から構成される。ここで、レンズ鏡筒12は、装置本体11に一体であってもよいし、着脱できるものであってもよい。
装置本体11は、撮像部21、画像処理回路22、表示部23、バッファメモリ部24、記憶部25、CPU26、操作部27及び通信部28を備えている。撮像部21、画像処理回路22、表示部23、バッファメモリ部24、記憶部25、CPU26、操作部27及び通信部28は、バスを介して電気的に接続される。なお、本発明の画像処理装置は、CPU26及び画像処理回路22からなる。
撮像部21は、撮像素子29、A/D(Analog/Digital)変換部30を有している。撮像部21は、設定された撮像条件(例えば露出値、シャッタ速度等)に従って、CPU26により、その動作が制御される。
撮像素子29は、光電変換面を備え、レンズ鏡筒12により光電変換面に結像された光学像を電気信号に変換して、A/D変換部30に出力する。撮像素子29は、例えば、CMOS(Complementary Metal Oxide Semiconductor)などの光電変換素子で構成される。ここで、撮像素子29は、光電変換面の全領域において光学像を電気信号に変換してもよいし、光電変換面の一部領域において光学像を電気信号に変換するようにしてもよい。この撮像素子29から出力される電気信号が画像データとなる。
A/D変換部30は、撮像素子29から出力される画像データをデジタル化して、デジタル化した画像データをバッファメモリ部24等に出力する。
画像処理回路22は、記憶部25に記憶されている画像処理条件に基づいて、バッファメモリ部24に一時的に記憶されている画像データに対する画像処理を行う。ここで、画像処理としては、ホワイトバランス調整、補間処理、色調補正処理、階調変換処理などが挙げられる。画像処理回路22にて画像処理が施された画像データは、バッファメモリ部24に一次記憶される他、通信部28を介して記憶媒体31に記憶される。
また、画像処理回路22は、撮影指示が行われていない状態で撮像部21にて連続して得られる画像データを用いて、主要被写体領域を設定する処理を実行する。ここで、撮影指示が行われていない状態で撮像部21にて連続して得られる画像データを、スルー画像データと称する。なお、主要被写体領域を設定する処理については、後述する。
表示部23は、例えば液晶ディスプレイが挙げられる。この表示部23は制御部を有し、この制御部により表示部23における画像の表示制御が行われる。ここで、表示部23に表示される画像としては、撮像部21により得られた画像データに基づく画像や、各種設定を行う際に表示する画像が挙げられる。バッファメモリ部24は、撮像部21によって生成された画像データや画像処理回路22によって画像処理が施された画像データを一時的に記憶する。記憶部25は、撮像条件や、各種判定の際にCPU26によって参照される判定条件などを記憶する。
CPU26は、画像処理回路22や記憶部25などから取得した情報や、操作部27の操作状態などに基づいて、装置本体11の各部を統括的に制御する。CPU26による制御には、焦点調整(AF)の設定、露出調整(AE)の設定、ホワイトバランス調整(AWB)の設定、閃光の発光量の変更の設定、被写体追尾の設定、各種撮影モードの設定、各種画像処理の設定、各種表示の設定、ズーム倍率に連動した明るさの最適化の設定などが含まれる。
操作部27は、電源スイッチ、シャッタボタン、マルチセレクタ(十字キー)、又はその他の操作キーから構成される。なお、表示部23がタッチパネルを備えた表示部23となる場合、タッチパネルも操作部27として機能する。この操作部27は、ユーザの操作入力を受け付け、操作入力に応じた信号をCPU26に出力する。
通信部28は、不揮発性メモリからなるメモリカード等、装置本体11に対して着脱することができる記憶媒体31と電気的に接続される。通信部28は、装置本体11に装着された記憶媒体31にデータ(画像データ、領域の情報など)を書き込む、記憶媒体31に記憶されたデータを消去する。また、通信部28は、必要に応じて、記憶媒体31に記憶されたデータの読み出しを行う。
レンズ鏡筒12は、撮像光学系35、レンズ駆動部36、エンコーダ37、鏡筒制御部38を有している。撮像光学系35はフォーカスレンズやズームレンズなどの複数のレンズを有している。この撮像光学系35の各レンズは、レンズ駆動部36により、その位置が光軸方向に移動するように制御される。撮像光学系35は、装置本体11に設けられた撮像素子29の受光面(光電変換面)に取り込まれた光学像を導く。
レンズ駆動部36は、例えば駆動モータや、ギヤ機構又はヘリコイド機構などの駆動機構を有し、撮像光学系35の各レンズを光軸方向に移動させる。エンコーダ37は、撮像光学系35のズームレンズやフォーカスレンズが光軸方向に移動したときに、その移動に伴う位置や移動方向を検出し、鏡筒制御部38に出力する。
鏡筒制御部38は、装置本体11のCPU26から入力される駆動制御信号に応じて、レンズ駆動部36を制御する。ここで、駆動制御信号とは、撮像光学系35の各レンズを光軸方向に移動させる制御信号である。鏡筒制御部38は、駆動制御信号に応じて、レンズ駆動部36に出力するパルス電圧のステップ数を制御する。また、鏡筒制御部38は、撮像光学系の各レンズの移動量に応じた信号に基づいて、フォーカスレンズの位置(フォーカスポジション)を、装置本体11のCPU26に出力する。
次に、画像処理回路22の構成について説明する。上述したように、画像処理回路22は、画像処理条件に基づいて画像データに対する画像処理を実行する他に、スルー画像データを用いて、主要被写体領域を設定する処理を実行する。図2に示すように、画像処理回路22は、検出部41、判定部42、追尾部43、評価部44及び設定部45の機能を有している。
検出部41は、撮像部21にて取得されるスルー画像データを用いて、該スルー画像データに基づいた画像に含まれる被写体の領域を検出する。以下、スルー画像データに基づく画像をスルー画像と称する。ここで、被写体の領域を検出する処理としては、画像から得られる特徴量に基づいて被写体の領域を検出するための一手法であるマスク抽出処理が挙げられる。このマスク抽出処理を行うことで、検出部41は、スルー画像に含まれる被写体の領域を検出する。検出部41は、検出された被写体の領域をマスクとした上で、該マスクに係る情報(以下、マスク情報)を記憶部25に記憶する。ここで、マスク情報としては、マスク抽出処理の抽出条件(色区分やマスク区分など)、マスクの位置、マスクの大きさや形状、マスクの動き(移動方向、移動ベクトル)、マスクに該当する被写体までの距離の情報が含まれる。
判定部42は、複数のスルー画像のそれぞれから得られるマスク情報を用いて、同一のマスクがn回(nフレーム)以上連続して検出されるか否かを判定する。この判定を行うことで、同一のマスクが安定しているか否かが判定される。
例えば、図示を省略した撮像光学系35における光学ズーム倍率が一定の場合には、対象となるマスクと同色で、且つ同一サイズとなるマスクが、連続するnフレーム以上のスルー画像データのそれぞれで検出されているか否かを判定する。この場合、被写体自体が動いていても、静止していてもよい。
また、撮像光学系35における光学ズーム倍率を変更する場合や、撮像光学系35における光学ズーム倍率が一定で被写体又は撮影者が撮像光学系35の光軸方向に変化する場合もある。このような場合、連続して得られるスルー画像においては検出される被写体の領域の大きさが変化する。よって、対象となるマスクと同色となり、且つ光学ズーム倍率に合わせた拡大率又は縮小率でサイズが変化しているマスクが、連続するnフレーム以上のスルー画像のそれぞれで検出されているか否かを判定すればよい。
なお、判定部42においては、同一のマスクがn回(nフレーム)以上連続して検出されるか否かを判定するようにしているが、少なくとも2回(2フレーム)以上連続して検出される場合に、マスクが安定していると判定することができる。なお、マスクが安定しているか否かの判定として用いるスルー画像については、撮像部21から出力される全てのスルー画像を対象としてもよいし、撮像部21から出力されるスルー画像のうち、例えば3フレームおき等、所定フレーム間隔を空けて得られるスルー画像を対象のスルー画像として、対象となるスルー画像を用いて上記判定を行うことも可能である。
追尾部43は、主要被写体領域が設定された以降に得られるスルー画像に対して、例えば主要被写体領域として設定されたマスクを用いたテンプレートマッチングの手法を用い、取得されるスルー画像に含まれる主要被写体領域の位置を特定する。この処理をスルー画像のそれぞれに対して行うことで、主要被写体を追尾することが可能となる。
評価部44は、判定部42において、n回(nフレーム)以上連続して検出されるマスク(主要被写体領域として設定されるマスクも含む)に対する評価を実行する。ここで、評価部44は、記憶部25に記憶されたマスク情報を用いて、マスクに対する評価を行う。
設定部45は、評価部44における評価結果に基づいて主要被写体領域を設定する。ここで、主要被写体領域を設定する処理としては、主要被写体領域が設定されていないときに、新規に主要被写体領域を設定する場合の他に、主要被写体領域が設定されているときに、主要被写体領域となる被写体の領域を切り替える(再設定する)処理が含まれる。設定部45は、主要被写体領域を設定したときに、該設定した情報を記憶部25に書き込む。なお、この情報は、マスク情報に対応付けて記憶してもよいし、個別に記憶してもよい。
次に、評価部44における評価について説明する。以下、評価部44の評価において使用するマスク情報として、各マスクの位置情報を用いる場合について説明する。
評価部44は、n回(nフレーム)以上連続して検出されるマスクに対して評価値を求める。この評価値は、対象となるマスクの位置がスルー画像の中心から近いほど、評価値が高く、スルー画像の周縁部に近いほど、評価値が低くなる。対象となるマスクの評価値を求めた後、評価部44は、対象となるマスクの評価値に対する評価を行う。この評価の結果を用いて、設定部45は、主要被写体領域を設定する。
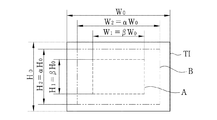
上述した評価は、各マスクに対して求められる評価値と、スルー画像TIに対して設定される領域A及び領域Bのそれぞれに対する値(後述する閾値Ta及びTb)とを比較することで実行される。
図3に示すように、領域Aは、その横方向の長さW1及び縦方向の長さH1がスルー画像TIの横方向の長さW0及び縦方向の長さH0のα(α=0.5〜0.6)倍に設定される。この領域Aは、対象となるマスクに該当する被写体が主要被写体であれば、画角の中央の領域に位置するという概念に基づき設定される領域である。よって、上述した閾値Taは、領域Aにマスクが含まれると評価できる該マスクの評価値の最小値となる。
また、領域Bは、その横方向の長さW2及び縦方向の長さH2がスルー画像の横方向の長さW0及び縦方向の長さH0のβ(β=0.8〜0.9)倍に設定される。ここで、領域Bは必ずしも設定する必要はないが、撮像光学系35におけるレンズ収差等、撮像光学系35のレンズ性能を考慮して設定される。この領域Bは、主要被写体が画角から外れたか否かを評価する際に用いる領域となる。つまり、閾値Tbは、領域Bにマスクが含まれると評価できる該マスクの評価値の最小値となる。
なお、閾値Taや閾値Tbの値は、マスクの形状や大きさ等によって変動するものであってもよいし、固定であってもよい。また、上述したα及びβの値は、上記に限定されるものではなく、適宜設定してよい。
本実施形態では、評価部44の評価において使用するマスク情報として、各マスクの位置情報を用いる場合について説明するが、マスクの動き情報や、マスクに該当する被写体までの距離情報のいずれかを用いてもよい。例えばマスクの動き情報や距離情報を用いる場合には、上述した領域Aに含まれる被写体のうち、評価の高いマスクを主要被写体として設定すればよい。さらに、マスク情報として記憶されるマスクの位置情報、マスクの動き情報又はマスクに該当する被写体までの距離情報の少なくとも2つの情報、或いはこれら全ての情報を用いて評価値を算出することも可能である。
次に、撮影時の処理の流れについて、図4及び図5のフローチャートを用いて説明する。なお、このフローチャートは、撮像装置が撮影を行うことが可能な動作モードとなる場合に実行される。
ステップS101は、スルー画像データを取得する処理である。CPU26は、撮像部21を制御して、スルー画像データの取得を開始する。取得されたスルー画像データの画像情報はバッファメモリ部24に一時的に記憶される。このスルー画像データは、所定の時間間隔で連続して取得される。
ステップS102は、画像処理である。CPU26は、画像処理回路22に対して画像処理を行う指示を行う。この指示を受けて、画像処理回路22は、バッファメモリ部24に記憶されたスルー画像データを読み出す。そして、画像処理回路22は、読み出したスルー画像データに対して、ホワイトバランス調整、補間処理、色調補正処理、階調変換処理などの画像処理を実行する。これら画像処理が実行された後、画像処理回路22は、スルー画像データをバッファメモリ部24に一時記憶する。
ステップS103は、スルー画像を表示する処理である。このステップS103の処理において、CPU26は、バッファメモリ部24に一時記憶されたスルー画像データを読み出し、表示部23に出力する。これを受けて、表示部23は読み出したスルー画像データに基づく画像を表示する。これにより、スルー画像が表示される。
ステップS104は、マスク抽出処理である。CPU26は、画像処理回路22に対して、主要被写体領域を設定する指示を行う。この指示を受けて、画像処理回路22は、バッファメモリ部24からスルー画像データを読み出す。そして、画像処理回路22は、読み出したスルー画像データを用いてマスク抽出処理を行う。マスク抽出処理が実行されることで被写体の領域が検出され、検出された被写体の領域がマスクとして抽出される。
ステップS105は、マスクが抽出できたか否かを判定する処理である。ステップS104の処理により、被写体の領域が検出され、該被写体の領域がマスクとして抽出されている場合には、CPU26は、ステップS105の判定結果をYesとする。この場合、ステップS106に進む。一方、ステップS104の処理において被写体の領域が検出できないときにはマスクは抽出されないので、CPU26は、ステップS105の判定結果をNoとする。この場合、ステップS112に進む。
ステップS106は、マスク情報を記録する処理である。CPU26は、ステップS104により抽出したマスクに係る情報をマスク情報として記憶部25等に記録する。
ステップS107は、n回以上連続して抽出されたマスクがあるか否かを判定する処理である。このステップS107における判定は、ステップS104のマスク抽出処理により抽出されたマスクが安定しているか否かを判定するためのものである。よって、n回以上連続して同一のマスクを抽出した場合、CPU26は抽出されたマスクが安定していると判定する。つまり、主要被写体領域を正しく検出していると判断することができる。この場合、CPU26は、ステップS107の判定結果をYesとし、ステップS108に進む。一方、n回以上連続して同一のマスクを抽出していない場合は、CPU26は、ステップS104のマスク抽出処理により抽出されたマスクが安定していないと判定する。この場合、CPU26は、ステップS107の判定結果をNoとし、ステップS112に進む。CPU26は、ステップS107の判定結果を記憶部25に記録する。
ステップS108は、抽出したマスクを評価する処理である。画像処理回路22は、n回(nフレーム)以上連続して抽出されたマスクを主要被写体領域の候補となるマスクとする。そして、画像処理回路22は、主要被写体領域の候補となるマスクに対応したマスク情報を記憶部25から読み出す。そして、画像処理回路22は、読み出したマスク情報に基づき、対象となるマスクに対する評価値を求める。画像処理回路22は、求めた評価値と、閾値Taと比較することで、対象となるマスクを評価する。
ステップS109は、主要被写体領域を設定する処理である。画像処理回路22は、ステップS108における評価結果を用いて、主要被写体領域を設定する。
ステップS110は、主要被写体領域に係る情報を記憶する処理である。画像処理回路22は、主要被写体領域の情報を記憶部25等に記録する。主要被写体領域の情報には、用いられたマスクに関するマスク情報、主要被写体領域の位置、主要被写体領域の大きさや形状などの情報が含まれる。
ステップS111は、主要被写体領域情報を表示する処理である。CPU26は、主要被写体領域の情報を表示部23に出力する。表示部23は、出力された主要被写体領域の情報に基づいた表示をスルー画像に重畳して表示する。主要被写体領域の情報に基づいた表示としては、例えば主要被写体領域であることを示す枠が挙げられる。なお、この枠は、主要被写体領域の形状に応じた枠であってもよいし、矩形や円形など所定の形状の枠であってもよい。このような表示を行うことにより、ユーザは、自動で検出される主要被写体領域の位置や形状がどのようなものであるかを、容易に把握することができる。
ステップS112は、撮影指示があるか否かを判定する処理である。操作部27を用いた入力操作が行われた場合、CPU26には、操作部27における入力操作に基づく信号が入力される。CPU26は、この入力される信号が撮影指示を示す信号であるか否かを判定する。入力される信号が撮影指示を示す信号であれば、CPU26は、ステップS112の判定結果をYesとする。この場合、ステップS113に進む。一方、入力される信号が撮影指示を示す信号でない場合には、CPU26は、ステップS112の判定結果をNoとする。この場合、ステップS120に進む。
ステップS113は、撮像処理である。例えばステップS109で主要被写体領域を設定した場合、CPU26は、設定した主要被写体領域の情報に基づいて、焦点調整(AF)の設定処理、露出調整(AE)の設定処理、ホワイトバランス調整処理(AWB)の3A処理を行うとともに、画像処理回路22における各種画像処理の条件等を決定する。また、ステップS113で主要被写体領域を設定していない場合、CPU26は、例えば中央の領域など特定の領域を用いて、焦点調整(AF)の設定処理、露出調整(AE)の設定処理、ホワイトバランス調整処理(AWB)の3A処理を行うとともに、画像処理回路22における各種画像処理の条件等を決定する。そして、CPU26は、上述した処理の結果に基づいて、撮像処理を実行する。
ステップS114は、画像を記録する処理である。CPU26は、ステップS113による撮像処理により取得された画像データを、通信部28を介して記憶媒体31に記録して一連の処理を終了する。
上述したステップS112の判定処理において、撮影指示がないと判定された場合には、ステップS120に進む。
ステップS120は、スルー画像データを取得する処理である。このステップS120の処理は、ステップS101と同一の処理である。
ステップS121は、画像処理である。このステップS121の処理は、ステップS102と同一の処理である。
ステップS122はスルー画像を表示する処理である。このステップS122の処理は、ステップS103と同一の処理である。
ステップS123は、主要被写体領域の設定があるか否かを判定する処理である。CPU26は、記憶部25を参照する。そして、主要被写体領域の情報が記憶部25に記憶されていれば、CPU26はステップS123の判定結果をYesとする。この場合、ステップS124及びステップS125の処理と、ステップS126からステップS128の処理とが同時並行にて実行される。
一方、主要被写体領域の情報が記憶部25に記憶されていない場合、CPU26はステップS123の判定結果をNoとする。この場合、ステップS104に戻る。つまり、この場合には、主要被写体領域を設定するためのマスク抽出処理が再度実行される。
ステップS124は、追尾処理である。CPU26は、画像処理回路22に対して追尾処理を指示する。これを受けて、画像処理回路22は、バッファメモリ部24からスルー画像データを読み出す。また、画像処理回路22は、記憶部25から主要被写体領域の情報を読み出す。そして、画像処理回路22は、読み出した画像データ及び情報を用いて、例えばテンプレートマッチングなどの手法により、主要被写体領域を特定する。
ステップS125は、主要被写体領域の情報を更新する処理である。画像処理回路22は、ステップS124により特定した主要被写体領域に係る情報を、新たな主要被写体領域の情報として記憶部25に記憶する。ここで、ステップS124により新たに得られた主要被写体領域の情報は、先に記憶された主要被写体領域の情報と置き換えて記憶するものであってもよいし、ステップS124により新たに得られた主要被写体領域の情報を先に記憶された主要被写体領域の情報に書き加えるものであってもよい。
上述したように、ステップS124及びステップS125の処理と同時並行にて、ステップS126からステップS128の処理が実行される。
ステップS126は、マスク抽出処理である。なお、このステップS126の処理は、ステップS104の処理と同一の処理である。
ステップS127は、新たなマスクが抽出されたか否かを判定する処理である。CPU26は、記憶部25に記憶されたマスク情報を読み出し、ステップS126におけるマスク抽出処理により得られたマスクのうち、新たに抽出したマスクがあるか否かを判定する。新たに抽出されたマスクがあるときには、CPU26は、ステップS128の判定結果をYesとする。この場合、ステップS128に進む。一方、新たに抽出されたマスクがないときには、CPU26は、ステップS128の判定結果をNoとする。この場合、ステップS129に進む。
ステップS128は、新たなマスク情報を記録する処理である。CPU26は、ステップS126にて取得された新たなマスクに係る情報を記憶部25に記録する。
ステップS129は、主要被写体領域に設定されたマスクの他に、n回以上連続して抽出されたマスクがあるか否かを判定する処理である。n回以上連続して同一のマスクを抽出した場合、CPU26はステップS129の判定結果をYesとする。この場合、ステップS130に進む。一方、n回以上連続して同一のマスクを抽出していない場合は、CPU26はステップS129の判定結果をNoとする。この場合、ステップS131に進む。
ステップS130は、主要被写体領域として設定されたマスクを含む、対象となるマスクを評価する処理である。画像処理回路22は、記憶部25から対象となるマスク情報を読み出す。そして、画像処理回路22は、読み出したマスク情報を用いて、対象となるマスクのそれぞれに対する評価を行う。なお、ステップS130における評価においては、主要被写体領域として設定される被写体の領域に対応するマスクに対しては閾値Tbを用いた評価を行う。また、その他の被写体の領域に対応するマスクに対しては閾値Taを用いた評価を行う。
上述したステップS129の判定処理でNoとなる場合、ステップS131に進む。
ステップS131は、主要被写体領域として設定されたマスクに対する評価を行う処理である。画像処理回路22は、記憶部25に記憶された主要被写体領域の情報を読み出す。そして、画像処理回路22は、読み出した主要被写体領域の情報を用いて、主要被写体領域となるマスクの評価を行う。この場合、画像処理回路22は、閾値Tbを用いて評価を行う。
ステップS132は、主要被写体領域の再設定を行うか否かを判定する処理である。画像処理回路22は、ステップS130又はステップS131のいずれかにおいて実行されたマスクの評価結果を用いて、主要被写体領域を再設定するか否かを判定する。例えば、ステップS130において、主要被写体領域に設定されたマスク及び他のマスクに対する評価を行っている場合、主要被写体領域に設定されたマスクの評価結果と、他のマスクの評価結果とから、主要被写体領域として設定されたマスクの再設定を行うか否かを判定する。なお、この場合のマスクの再設定とは、マスクを切り替えることを指す。主要被写体領域として設定されたマスクの再設定を行う場合、画像処理回路22は、ステップS132の判定結果をYesとする。この場合、ステップS133に進む。一方、主要被写体領域として設定されたマスクの再設定を行う必要がない場合には、画像処理回路22は、ステップS132の判定結果をNoとする。この場合、ステップS135に進む。
一方、ステップS131において、主要被写体領域に設定されたマスクに対する評価を行っている場合、主要被写体領域に設定されたマスクの評価から、主要被写体領域として設定されたマスクの再設定を行うか否かを判定する。この場合の再設定は、主要被写体領域となるマスクの設定を解除することを指す。この場合も、主要被写体領域として設定されたマスクの再設定を行う場合、画像処理回路22は、ステップS132の判定結果をYesとする。この場合、ステップS133に進む。一方、主要被写体領域として設定されたマスクの再設定を行う必要がない場合には、画像処理回路22は、ステップS132の判定結果をNoとする。この場合、ステップS135に進む。
ステップS133は、主要被写体領域を再設定する処理である。画像処理回路22は、主要被写体領域を再設定する。例えばステップS130において、主要被写体領域に設定されたマスク及び他のマスクに対して評価を行っている場合、画像処理回路22は、主要被写体領域となるマスク設定を解除し、他のマスクに対して主要被写体領域を設定する。また、ステップS131において、主要被写体領域に設定されたマスクの評価を行っている場合、画像処理回路22は、主要被写体領域となるマスク設定を解除する。
ステップS134は、主要被写体情報を更新する処理である。画像処理回路22は、ステップS133により実行された主要被写体領域を再設定した結果に基づいて、記憶部25に記録された主要被写体領域情報を更新する。
ステップS135は、主要被写体に設定されたマスクがあるか否かを判定する処理である。CPU26は、記憶部25を参照する。記憶部25に主要被写体領域情報があれば、CPU26は、ステップS135の判定結果をYesとする。この場合、ステップS136に進む。一方、記憶部25に主要被写体領域情報がない場合、CPU26は、ステップS135の判定結果をNoとする。この場合、ステップS112に戻る。なお、記憶部25に主要被写体領域情報がない場合としては、例えばステップS133における主要被写体領域の再設定において、主要被写体領域に対する設定が解除された場合が挙げられる。
ステップS136は、主要被写体情報を表示する処理である。このステップS111の処理と同一の処理である。このステップS136の処理が実行されると、ステップS112に戻る。
このようにして、主要被写体領域が設定されていない場合には、取得されたスルー画像データから求めた特徴量に基づいて検出された被写体の領域をマスクとして抽出する。この処理を複数のスルー画像データに対して行い、複数のスルー画像データから抽出されたマスクを比較する。この比較により、検出されたマスクが安定しているかが判定される。そして、マスクが安定していると判定された場合、そのマスクに対する評価を行い、評価が良いマスクに該当する被写体の領域を主要被写体領域として設定する。
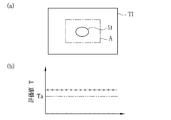
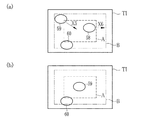
一般に被写体を撮影する場合、被写体が画角の中央部分に位置するように撮像装置10を構える。よって、図6(a)に示すように、撮像装置10により得られるスルー画像TIからは、中央部分(例えば領域A)に位置する被写体の領域がマスク51として抽出される。ここで、静止する被写体を撮影する場合、撮像装置10の位置や向きが変化しない、又は撮像装置10の撮像光学系35における撮影倍率(光学ズーム倍率)を変更しない限りは、画角が固定される。よって、画角に対する被写体の位置は同一の位置となる。つまり、連続して得られる複数のスルー画像TIからは、常に同一のマスク51が検出され、したがって、マスク51は安定していると判定される。また、マスク51は領域Aの内部に位置しているので、マスク51に対する評価値Tは一定の値で、且つ閾値Taを超過する(図6(b)参照)。よって、このような場合には、マスク51に該当する被写体の領域が主要被写体領域として設定される。
一方、構図によっては、静止する被写体を画角の中央部分ではなく、画角の周縁部に位置して撮影する場合もある。図7(a)に示すように、撮像装置10により得られるスルー画像TIからは、中央部分からずれた位置にある被写体の領域がマスク52として抽出される。この場合、抽出されたマスク52は、複数のスルー画像TIのそれぞれから検出されることから、安定するマスクとして判定される。しかしながら、このマスク52は、領域Aから外れた位置にある。したがって、マスク52に対する評価値Tは一定の値となるが、閾値Ta以下となる(図7(b)参照)。よって、マスク52に該当する被写体の領域は、主要被写体領域として設定されることがない。
一方、移動する被写体が撮像装置10における画角内に入り込む場合や、撮像装置10における画角内から外れる場合もある。
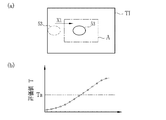
まず、移動する被写体が画角内に入り込む場合について考慮する。図8(a)に示すように、移動する被写体を撮影する場合、複数のスルー画像TIから検出される被写体の領域、言い換えれば抽出されるマスク53は、図中X1方向に移動し、画角の中央部分に到達する。ここで、複数のスルー画像TIから得られるマスク53は、同一のマスクであるとして抽出されるので、マスク53は安定していると判定される。
ここで、図8(b)に示すように、マスク53に対する評価値は、徐々に高くなる。そして、マスク53がスルー画像TIの中央部分に到達する、言い換えれば領域Aに入り込むいと、その評価値Tは閾値Taを超過する。よって、マスク53がスルー画像TIの中央部分(領域A)に入り込む以降に、このマスク53に該当する被写体の領域が主要被写体領域として設定される。
次に、画角の中央部分に位置する被写体が移動する場合もある。この場合、図9(a)に示すように、被写体が画角の中央部分に位置している場合には、複数のスルー画像TIから、該被写体が検出され、被写体の領域がそれぞれマスク54として検出される。ここで、マスクはスルー画像TIの領域Aに位置しているので、このマスク54に対する評価値Tは、それぞれ一定の値となり、閾値Taを超過する。よって、マスク54に対応する被写体の領域が主要被写体領域として設定される。
その後、被写体が移動すると、複数のスルー画像TIから抽出されるマスク54の位置は、それぞれX2方向に変化する。上述したように、マスクに対する評価値は、スルー画像TIの周辺部に近づくほど、その値が低くなる。よって、図9(b)に示すように、X2方向に移動するマスク54に対する評価値Tは、徐々に低くなる。よって、この評価値Tは、画角から外れたことを示す閾値Tb以下となる。この評価値Tが、閾値Tb以下となる場合に、マスク54に該当する被写体の領域に対する主要被写体領域の設定が解除される。
例えば主要被写体領域が設定された後、撮影操作が実行されない場合には、引き続きスルー画像TIが取得される。この場合も、スルー画像TIから抽出されたマスクに対して、安定しているか否かの判定、及びマスクに対する評価が行われる。この過程で、新たにスルー画像TIから抽出されたマスクがあれば、新たに抽出されたマスクのそれぞれに対して、安定しているか否かの判定、及びマスクに対する評価を行う。なお、主要被写体領域として設定される被写体の領域に基づくマスクに対しては、追尾処理が実行された後、追尾処理により検出されたマスクに対する評価が実行される。したがって、これら評価に基づき、必要に応じて、主要被写体領域の再設定が実行される。
例えば、画角の中心部分に位置している被写体が移動し、同時に、他の被写体が画角の中心部分に向けて移動する場合について説明する。この場合、図10(a)に示すように、主要被写体領域に設定された被写体の領域に基づくマスク55は、図中X3方向に移動する。これに併せて、他の被写体の領域に基づくマスク56が、図中X3方向に移動する。よって、図10(b)に示すように、主要被写体領域に設定されるマスク55は、スルー画像TIから徐々に消えていき、他の被写体の領域に基づいたマスク56が徐々にスルー画像TIの中央部分に近づく。そして、図10(c)に示すように、他の被写体の領域に基づくマスク56のみが、スルー画像TIの内部に含まれることになる。
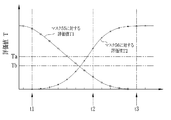
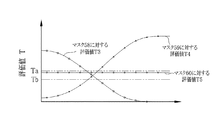
図11は、マスク55に対する評価値T1と、マスク56に対する評価値T2とのそれぞれの評価値の変化を示すグラフである。なお、マスク55に対する評価値T1を「○」で示し、マスク56に対する評価値T2を図中「△」で示している。
図11中「t1」にて示す各マスクの評価値T1,T2が、図10(a)に示すスルー画像TIにおけるマスクの評価値である。つまり、図10(a)に示すスルー画像TIにおいては、マスク55に対する評価値T1のみが求められる。ここで、マスク55は、スルー画像TIにおける領域A内に位置することから、マスク55に対する評価値T1は閾値Taを超過している。よって、マスク55に該当する被写体の領域が主要被写体領域として設定される。
図11中「t2」にて示す各マスクの評価値T1,T2が、図10(b)に示すスルー画像TIにおけるマスクの評価値である。つまり、図10(b)に示すスルー画像TIにおいては、マスク55の他に、マスク56も抽出されている。よって、これらマスクに対する評価値がそれぞれ求められる。この場合、マスク55に対する評価値T1は、閾値Tb以下となり、また、マスク56に対する評価値T2は、閾値Taを超過している。この場合、主要被写体領域として、マスク55に該当する被写体の領域の設定を解除する。同時に、マスク56に該当する被写体の領域を主要被写体領域として設定する。よって、主要被写体領域として設定される被写体の領域が切り替えられる。
図11中「t3」にて示すマスクの評価値T1,T2が、図10(c)に示すスルー画像TIにおけるマスクの評価値である。図10(c)に示すスルー画像TIにおいては、マスク56に対する評価値T2のみが求められる。ここで、マスク56は、スルー画像TIにおける領域A内に位置することから、マスク56に対する評価値T2は閾値Taを超過している。よって、以降に得られるスルー画像TIにおいて、マスク56の評価値T2が閾値Tbを越えていれば、マスク56に該当する被写体の領域が、引き続き、主要被写体領域となる。このように、スルー画像TIから検出される被写体が異なる被写体に入れ替わる場合であっても、主要被写体領域を容易に且つ的確に再設定することが可能となる。
ここで、図10(d)に示すように、スルー画像TI(画角)から検出されなくなった被写体の領域(図10においてはマスク55)が、所定時間経過後に得られるスルー画像TIにより再度検出される場合がある。このような場合には、主要被写体領域として設定される被写体の領域を、評価値に関係なく変更する(切り替える)ようにしてもよいし、そのときに主要被写体領域として設定される被写体の領域と、再度検出された被写体の領域との両方の領域を主要被写体領域としてもよい。これら場合、主要被写体領域として設定された被写体の領域に基づくマスク情報を消去せずに、記憶部25に保持しておけばよい。
また、スルー画像TIから抽出される被写体の領域が複数検出される場合もある。このような場合には、評価値が閾値Taを超過するマスクのうち、最も評価値の高いマスクに該当する被写体の領域が主要被写体領域として設定される。図12(a)に示すように、スルー画像TIからマスク58,59,60が抽出される場合について説明する。このとき、図12(b)に示すように、マスク58に該当する被写体は画角から外れる方向(図中X4方向に)に移動し、マスク59に該当する被写体は図中X5方向に移動し、画角の中央部分で停止すると仮定する。また、マスク60に該当する被写体は、静止していると仮定する。
図13は、各マスク58,59,60に対する評価値の変化を示すグラフである。ここで、図13中「○」はマスク58に対する評価値T3、「△」はマスク59に対する評価値T4、「◇」はマスク60に対する評価値T5をそれぞれ示す。
図13に示すように、マスク58に対する評価値T3は、時間経過とともに低下し、画角から外れることで評価値が算出されなくなる。また、マスク59に対する評価値T4は、画角の中央部分に移動することで、その評価値T4が高くなる。一方、マスク60は、静止している被写体に該当することから、その評価値T5は一定の値となる。
この場合、閾値Taを超過する評価値となるマスク58及びマスク59において、マスク58に対する評価値T3がマスク59に対する評価値T4よりも高いことから、この場合、マスク58に該当する被写体の領域が主要被写体領域として設定される。
上述したように、マスク58は、該当する被写体が画角から外れる方向に移動しているので、マスク58に対する評価値T3は低くなる。一方、マスク59は、該当する被写体が画角の中央に向けて移動することから、マスク59に対する評価値T4は高くなる。マスク58に対する評価値T3が閾値Tb以下となるときには、マスク59に対する評価値T5は閾値Taを超過しているので、主要被写体領域に設定される被写体の領域が切り替わる。つまり、主要被写体領域に設定される被写体の領域が、マスク58に該当する被写体の領域から、マスク59に該当する被写体の領域に切り替わる。
このように、複数の被写体が画角内で移動する場合であっても、主要被写体領域の再設定を容易に、かつ的確に行うことが可能となる。
本実施形態においては、撮像光学系35における光学ズーム倍率を一定にした場合について説明しているが、これに限定される必要はなく、撮像光学系35における光学ズーム倍率を変更した場合であっても、本発明を適用することができる。つまり、光学ズーム倍率を変更した場合、画角が変化する。例えば、光学ズーム倍率を高くした場合には、画角に含まれる実際の撮影範囲が狭くなる。よって、意図する主要被写体領域に設定した被写体の領域が画角から外れる場合がある。この場合、ユーザが意図していなくとも、画角に含まれる他の被写体の領域が主要被写体領域として自動的に設定される。
一方、光学ズーム倍率を低くした場合には、画角に含まれる実際の撮影範囲が広くなることから、ユーザが意図する被写体だけでなく、他の被写体も画角に含まれる。この場合意図する被写体の領域を主要被写体領域として設定していても、他の被写体の領域に対する評価が高くなるときがある。このようなときには、主要被写体領域は、ユーザの意図する被写体の領域から、他の被写体の領域に再設定される。このように、スルー画像TIにおける主要被写体領域切り替えを、容易に、且つ的確に行うことができる。なお、主要被写体領域の再設定により、ユーザが意図していない被写体の領域が主要被写体領域となる場合には、撮像装置における画角や向きなどを調整すればよい。
本実施形態では、安定していると判定されたマスクに対する評価を行うことで、主要被写体領域を設定している。しかしながら、これに限定される必要はない。例えば表示部として、タッチパネルを備えた表示部を備えた撮像装置の場合には、操作部としてタッチパネルが機能する。この場合、取得されるスルー画像TIから被写体の検出を行い、その結果をスルー画像TIに重畳させて表示する。この表示は、例えば検出された被写体の領域に対して枠などを用いて表示すればよい。そして、表示されるスルー画像TIにユーザが意図する被写体がある場合に、該被写体の領域に対応する箇所へのタッチ操作をタッチパネルに対して実行する。このタッチパネルへのタッチ操作が行われたときに、その操作された位置にある被写体の領域を主要被写体領域として設定すればよい。
また、タッチパネルを備えていない表示部の場合には、重畳表示される枠のうち、選択候補の被写体の領域に対する枠を他の枠とは異なる表示にて表示する。そして、十字キーなどの操作により、選択候補となる被写体の領域に対する枠の表示を他の被写体の領域に切り替えながら表示する。そして、意図する被写体の領域に、選択候補の被写体の領域に対する枠を移動させたときに、選択を意図する操作を行うことで、主要被写体領域を設定することも可能である。
本実施形態では、撮像装置を例に取り上げているが、これに限定される必要はなく、例えばカメラ機能を備えた携帯電話機やスマートフォンなどの携帯型情報端末機や、カメラとコンピュータとからなるカメラシステムであっても、本発明を適用することが可能である。また、この他に、取得された画像データを入力することで、図4及び図5のフローチャートの処理を実行する画像処理装置であってもよい。この場合、ステップS101及びステップS120の処理は省略すればよい。
また、この他に、図4及び図5におけるフローチャートの処理をコンピュータに実行させることが可能な画像処理プログラムであってもよい。この場合、画像処理プログラムは、メモリカード、光学ディスク、磁気ディスクなど、コンピュータにより読み取ることが可能な記憶媒体に記憶されていることが好ましい。