JP2017019665A - Entangled parts separation device - Google Patents
Entangled parts separation device Download PDFInfo
- Publication number
- JP2017019665A JP2017019665A JP2016162558A JP2016162558A JP2017019665A JP 2017019665 A JP2017019665 A JP 2017019665A JP 2016162558 A JP2016162558 A JP 2016162558A JP 2016162558 A JP2016162558 A JP 2016162558A JP 2017019665 A JP2017019665 A JP 2017019665A
- Authority
- JP
- Japan
- Prior art keywords
- protrusions
- parts
- drum
- entangled
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000926 separation method Methods 0.000 title claims abstract description 23
- 230000005484 gravity Effects 0.000 claims abstract description 17
- 230000004048 modification Effects 0.000 description 11
- 238000012986 modification Methods 0.000 description 11
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images









Abstract
Description
この発明は、絡み部品分離装置に関し、絡み合った複数のパーツの絡みを除去する絡み部品分離装置に関する。 The present invention relates to an entangled component separator, and more particularly to an entangled component separator that removes entanglement of a plurality of entangled parts.
近年、生産の自動化が進んでおり、部品の組み付け作業にロボットが利用される。このロボットが組み付けの対象とする部品は、ロボットが掴み取ることができるように、部品の向きを揃えてロボットに供給する必要がある。ロボットに部品を向きを揃えて供給する装置として、部品を振動することによって部品を移動させ、部品が移動する経路中で部品の向きを揃える振動型のパーツフィーダーが知られている。例えば、特開2015−059008号公報には、特定面を向いたチップ部品をピックアップするピックアップ装置に、チップ部品を供給するチップ部品供給装置であって、内筒壁と外筒壁に挟まれた周回状の搬送路を有する振動ボウルと、該振動ボウルを加振する加振器とを備え、前記搬送路は、斜面と、該斜面の上端に連続し該斜面より傾斜が緩やかであって前記ピックアップ装置がピックアップ動作を行なうピックアップ面と、前記斜面の下端と前記ピックアップ面とを接続する段差とを備え、前記加振器は、前記振動ボウルを加振し、チップ部品を前記斜面の下端から上端方向に前記搬送路を移動させると共に、前記斜面上に重なり合ったチップ部品をばらすものであり、前記段差は、ピックアップ面上に残されたチップ部品を反転可能に落下させるものであることを特徴とするチップ部品供給装置が記載されている。 In recent years, production has been automated, and robots are used for assembling parts. The parts to be assembled by the robot need to be supplied to the robot with the parts oriented so that the robot can grasp them. 2. Description of the Related Art As a device that supplies parts to a robot in a uniform orientation, there is known a vibration-type parts feeder that moves parts by vibrating the parts and aligns the parts in a path along which the parts move. For example, Japanese Patent Laying-Open No. 2015-059008 discloses a chip component supply device that supplies a chip component to a pickup device that picks up a chip component facing a specific surface, and is sandwiched between an inner cylinder wall and an outer cylinder wall. A vibrating bowl having a circular conveying path; and a vibrator for vibrating the vibrating bowl, wherein the conveying path is continuous with an inclined surface and an upper end of the inclined surface, and the inclination is gentler than the inclined surface. The pickup device includes a pickup surface on which a pickup operation is performed, and a step connecting the lower end of the slope and the pickup surface, the vibrator vibrates the vibrating bowl, and inserts a chip component from the lower end of the slope. While moving the transport path in the upper end direction, the chip parts overlapping on the slope are separated, and the step reverses the chip parts left on the pickup surface. It describes a chip component feeding apparatus, characterized in that for dropping the capacity.
しかしながら、振動型のパーツフィーダーは、互いに絡み合う複数の部品を分離することができないといった問題がある。
この発明は上述した問題点を解決するためになされたもので、この発明の目的の一つは、互いに絡まったパーツを容易に分離することが可能な絡み部品分離装置を提供することである。 The present invention has been made to solve the above-described problems, and one of the objects of the present invention is to provide an entangled component separating apparatus capable of easily separating parts entangled with each other.
上述した目的を達成するためにこの発明のある局面によれば、絡み部品分離装置は、パーツの導入口となる第1開口部と、パーツの排出口となる第2開口部とを含む円筒状のドラムと、ドラムの側壁からドラムの内側に突出する複数の突起部と、第1開口部の中心が第2開口部の中心より高い状態で、重力方向と交わる回転軸を中心にドラムを回転させる駆動機構と、を備える。 In order to achieve the above-described object, according to one aspect of the present invention, the entangled component separation device includes a first opening serving as a part introduction port and a second opening serving as a part discharge port. Rotate the drum around the rotation axis intersecting the direction of gravity with the drum, the plurality of protrusions protruding from the drum side wall to the inside of the drum, and the center of the first opening higher than the center of the second opening And a drive mechanism.
この局面に従えば、第1開口部の中心が第2開口部の中心より高い状態で、重力方向と交わる回転軸を中心にドラムが回転するので第1開口部に導入されたパーツが第1開口部から第2開口部に向かって移動する。第1開口部に導入されたパーツのうち他のパーツと絡み合った複数のパーツからなるパーツ群は、複数の突起部のいずれかに絡まるので、パーツ群が第2開口部に移動しないようにすることができる。また、複数の突起部のいずれかに絡まったパーツ群はドラムの回転によって上方に持ち上げられた後に重力によって落下する。このため、落下によって、パーツ群に含まれる複数のパーツのうちには他のパーツとの絡まりが解除される場合がある。このため、互いに絡まったパーツを容易に分離することが可能な絡み部品分離装置を提供することができる。 According to this aspect, since the drum rotates around the rotation axis that intersects the direction of gravity in the state where the center of the first opening is higher than the center of the second opening, the parts introduced into the first opening are the first. It moves from the opening toward the second opening. A part group consisting of a plurality of parts intertwined with other parts among the parts introduced into the first opening is entangled with one of the plurality of protrusions, so that the part group does not move to the second opening. be able to. A group of parts entangled with any of the plurality of protrusions is lifted upward by the rotation of the drum and then dropped by gravity. For this reason, entanglement with other parts may be canceled among the plurality of parts included in the part group due to falling. For this reason, the entangled component separation apparatus which can isolate | separate the parts entangled mutually can be provided.
好ましくは、複数の突起部は、ドラムの第1開口部から所定の距離の円周方向に互いに間隔をおいて配置される。 Preferably, the plurality of protrusions are spaced apart from each other in the circumferential direction by a predetermined distance from the first opening of the drum.
好ましくは、複数の突起部は、ドラムの第1開口部からの所定の距離の円筒状の領域に互いに間隔を置いて配置される。 Preferably, the plurality of protrusions are spaced apart from each other in a cylindrical region at a predetermined distance from the first opening of the drum.
好ましくは、パーツがドラムの回転に伴って複数の突起部の2以上に同時に絡むことがないように、複数の突起部の端部間の距離が設定される。 Preferably, the distance between the end portions of the plurality of protrusions is set so that the parts do not entangle with two or more of the plurality of protrusions simultaneously with the rotation of the drum.
好ましくは、パーツの複数がドラムに第1開口部から投入された状態で複数のパーツのうち他のパーツと絡む複数のパーツからなるパーツ群がドラムの回転に伴って複数の突起部の2以上に同時に絡むように、複数の突起部の端部間の距離が設定される。 Preferably, when a plurality of parts are inserted into the drum from the first opening, a part group consisting of a plurality of parts entangled with other parts among the plurality of parts is two or more of the plurality of protrusions as the drum rotates. The distances between the ends of the plurality of protrusions are set so as to be simultaneously entangled with each other.
好ましくは、複数の突起部のそれぞれの複数の端部間の距離の最小値は、パーツの最大値より大きい。 Preferably, the minimum value of the distance between each of the plurality of ends of the plurality of protrusions is greater than the maximum value of the part.
この局面に従えば、複数の突起部のそれぞれの複数の端部間の距離の最小値は、パーツの最大値より大きいので、1つのパーツが複数の第1突起部の2以上に同時に絡まないようにすることができ、ドラムの回転にともなってパーツが動かなくなるのを防止することができる。 According to this aspect, since the minimum value of the distance between the plurality of ends of each of the plurality of protrusions is larger than the maximum value of the parts, one part does not simultaneously entangle with two or more of the plurality of first protrusions. It is possible to prevent the parts from moving as the drum rotates.
好ましくは、複数の突起部それぞれがドラムの内壁に配置される間隔は、パーツの最大長より大きい。 Preferably, the interval at which each of the plurality of protrusions is disposed on the inner wall of the drum is greater than the maximum length of the part.
この局面に従えば、他のパーツと絡まない単独のパーツが複数の突起部の間をすり抜けることが可能となるので、単独のパーツを第2開口部から排出することができる。 According to this aspect, a single part that is not entangled with other parts can pass through between the plurality of protrusions, so that the single part can be discharged from the second opening.
以下、本発明の実施の形態について図面を参照して説明する。以下の説明では同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがってそれらについての詳細な説明は繰返さない。 Hereinafter, embodiments of the present invention will be described with reference to the drawings. In the following description, the same parts are denoted by the same reference numerals. Their names and functions are also the same. Therefore, detailed description thereof will not be repeated.
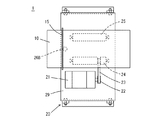
図1は、本実施の形態における絡み部品分離装置の一例を示す外観図である。図1を参照して、絡み部品分離装置1は、円筒状のドラム10と、ドラム10を回転させる駆動機構20と、を含む。駆動機構20は、ドラム10を回転可能な状態で支持する。また、駆動機構20は、ドラム10を、その回転軸39の重力方向に対する角度を調整可能に支持する。ここでは、回転軸39の重力方向に垂直な水平方向に対する角度を支持角度といい、図1では、支持角度がθ(θ>0)となる場合を例に示している。
FIG. 1 is an external view showing an example of an entangled component separation device in the present embodiment. Referring to FIG. 1, the entangled
図2は、支持角度が0度の場合における部品分離装置の正面図である。図3は、支持角度が0度の場合における部品分離装置の左側面図である。図4は、支持角度が0度の場合における部品分離装置の平面図である。図2〜図4を参照して、駆動機構20は、モーター21と、駆動ベルト23と、第1ローラ24と、第2ローラ25と、ストッパー26と、基台29と、を備える。
FIG. 2 is a front view of the component separating apparatus when the support angle is 0 degree. FIG. 3 is a left side view of the component separating apparatus when the support angle is 0 degree. FIG. 4 is a plan view of the component separating apparatus when the support angle is 0 degree. 2 to 4, the
モーター21、第1ローラ24および第2ローラ25は、それぞれの回転軸が並行となるように基台29に固定される。第1ローラ24および第2ローラ25それぞれの回転軸の基台29からの距離は同じである。第1ローラ24は、モーター21の駆動軸に接続されたプーリー22と駆動ベルト23によって接続されており、モーター21の回転力が第1ローラ24に伝達される。
The
第1ローラ24および第2ローラ25の回転軸を基準に、基台29の方向を定める。基台29の第1ローラ24および第2ローラ25の回転軸と交わる端部を、前方端および後方端という。基台29は、後方端が前方端よりも高くなるように傾きを変更可能である。
The direction of the
ドラム10は、パーツの導入口となる第1開口部11と、パーツの排出口となる第2開口部13と、その外壁から延びる円環状のフランジ15と、を備える。
The
ドラム10は、第1ローラ24および第2ローラ25上に載置される。ドラム10が第1ローラ24および第2ローラ25上に載置される方向は、第1開口部11が基台29の後方端側、第2開口部13が基台29の前方端側となる方向である。このため、ドラム10の回転軸39は、第1ローラ24および第2ローラ25の回転軸と並行であり、ドラム10の側壁からの距離が一定である。
The
ドラム10が、第1ローラ24および第2ローラ25上に載置された状態で、モーター21が駆動すると、モーター21の回転が駆動ベルト23を介して第1ローラ24に伝えられる。第1ローラ24が回転すると、第1ローラ24がドラム10と接する部分の摩擦力によってドラム10が回転する。さらに、ドラム10が回転すると、ドラム10が第2ローラ25と接する部分の摩擦力によって第2ローラ25が回転する。
When the
ストッパー26は、基台29上で、第1ローラ24および第2ローラの中間に固定される。ストッパー26は、基台29から垂直に伸びる軸26Aと、その軸で回転するローラ26Bとを含む。ドラム10が第1ローラ24および第2ローラ25上に載置された状態において、ストッパー26はドラム10の側面よりも下方となり、ストッパー26のローラ26Bがドラム10のフランジ15の最下端よりも上方となる。ドラム10は、フランジ15がストッパー26のローラ26Bよりも第1開口部11側に位置するように、第1ローラ24および第2ローラ25上に載置される。このため、ドラム10の第1開口部11から第2開口部13に向かう方向への移動は、ドラム10のフランジ15がストッパー26のローラ26Bと接触することによって規制される。したがって、基台29を、その後方端が前方端よりも高くなるように傾きを変更した場合であっても、ドラム10が回転軸39に沿った方向における基台29に対する相対的位置を一定に維持した状態で、ドラム10を回転させることができる。
The
ドラム10は、それぞれがドラム10の内壁から突出する複数の第1突起部31、複数の第2突起部33および複数の第3突起部35を備える。複数の第1突起部31、複数の第2突起部33および複数の第3突起部35それぞれは、ドラム10の内壁から垂直に突出する。
The
本実施の形態における絡み部品分離装置1において、ドラム10の直径を300mm、第1突起部31の長さを120mm、第2突起部33の長さを60mm、第3突起部35の長さを60mmとしている。
In the entangled
図5は、本実施の形態における絡み部品分離装置に投入されるパーツの一例を示す平面図である。図5を参照して、パーツは、断面円形で、一部が開口した環状の形状である。パーツは、一部が開口しているため、他のパーツが開口部分から入りこみ、絡みやすい形状である。本実施の形態においては、パーツの最大長を46mmとしている。 FIG. 5 is a plan view showing an example of parts put into the entangled component separation device in the present embodiment. Referring to FIG. 5, the part has a circular shape with a circular cross section and a part opened. Since some of the parts are open, other parts enter from the opening and are easily entangled. In the present embodiment, the maximum part length is 46 mm.
図2〜図4を再度参照して、本実施の形態における絡み部品分離装置1は、ドラム10が支持角度θの傾いた状態で駆動する。ドラム10の第1開口部11から複数のパーツが投入され、ドラム10が回転すると、複数のパーツは、重力によってドラム10内を第1開口部11から第2開口部13に向かう力を受ける。ドラム10は、複数の第1突起部31、複数の第2突起部33および複数の第3突起部35を、有するため、複数のパーツは、複数の第1突起部31、複数の第2突起部33および複数の第3突起部35の間をすり抜けながらドラム10内を第1開口部11から第2開口部13に移動する。
Referring again to FIGS. 2 to 4, the entangled
複数の第1突起部31は、第1開口部11から距離L1の円周方向に所定の間隔で配置される。互いに隣り合う2つの第1突起部31が配置される間隔の最大長は、パーツの最大長の2.5〜3倍であるのが好ましい。このため、第1突起部31の数は、ドラムの直径およびパーツの最大長によって定まる。複数の第1突起部31それぞれの長さは、ドラム10の半径より短い。このため、複数の第1突起部31それぞれは、他の第1突起部31と接触することがないので、1つのパーツが複数の第1突起部31のうちの2以上に同時に絡まる確率を小さくすることができる。
The plurality of
複数の第1突起部31それぞれの端部の間隔の最小値が、パーツの最大長より大きくするのが好ましい。このため、複数の第1突起部31それぞれの長さの最大値は、複数の第1突起部31それぞれの端部の間隔およびパーツの最大長により定まる。1つのパーツが複数の第1突起部31の2つに同時に絡まると、ドラム10が回転しても2つの第1突起部31によりパーツの移動が制限されてしまい、パーツが移動できなくなってしまう場合がある。このため、複数の第1突起部31それぞれの端部の間隔の最小値を、パーツの最大長より大きくすることにより、第1開口部に投入された複数のパーツのうち他のパーツと絡まない単独のパーツが、複数の第1突起部31の2以上に同時に絡まないようにすることができる。
It is preferable that the minimum value of the interval between the end portions of the plurality of
複数の第2突起部33は、複数の第1突起部31よりも第2開口部13側の円周方向に所定の間隔で配置される組を1以上含む。同じ組に属する互いに隣り合う2つの第2突起部33が配置される間隔は、パーツのサイズによって定まる。互いに隣り合う2つの第2突起部33が配置される間隔の最大長は、パーツの最大長の1.5〜2倍であるのが好ましい。このため、第1突起部31の数は、ドラムの直径およびパーツの最大長によって定まる。また、複数の第2突起部33の長さは、複数の第1突起部31の長さよりも短い。複数の第2突起部33の長さは、複数の第1突起部31の長さの半分以下とするのが好ましい。また、複数の第2突起部33の長さは、すべて同じである必要はなく、長さを異ならせてもよい。
The plurality of
複数の第3突起部35は、複数の第1突起部31よりも第1開口部13側の円周方向に所定の間隔で配置される組を1以上含む。同じ組に属する互いに隣り合う2つの第3突起部35が配置される間隔は、パーツのサイズによって定まる。互いに隣り合う2つの第3突起部35が配置される間隔の最大長は、パーツの最大長の2.5〜3倍であるのが好ましい。このため、第3突起部35の数は、ドラムの直径およびパーツの最大長によって定まる。また、複数の第3突起部35の長さは、複数の第1突起部31の長さよりも短い。複数の第3突起部35の長さは、複数の第1突起部31の長さの半分以下とするのが好ましい。また、複数の第3突起部35の長さは、すべて同じである必要はなく、長さを異ならせてもよい。
The plurality of
ここでは、ドラム10は、8個の第1突起部31を有し、16個の第2突起部33を1組とした3組を有し、8個の第3突起部35を1組とした3組を有する場合を例に説明する。第1突起部31、第2突起部33および第3突起部35は、断面円形の棒状の形状である。第1突起部31、第2突起部33および第3突起部35それぞれの端部は、丸みを帯びた形状である。パーツとの接触により、パーツを損傷しないようにするため、および、絡んだパーツが離脱しやすくするためである。さらに、第1突起部31、第2突起部33および第3突起部35それぞれは、絡んだパーツが滑りやすくするために、金属製とする場合には表面を研磨し、樹脂製とする場合にはフッ素樹脂でコーディングすることが好ましい。
Here, the
図6は、ドラムの展開図である。図6を参照して、第1開口部11から距離L1の位置の円周方向に、8個の第1突起部31が等間隔で配置される。図7は、第1開口部11から距離L1の位置のドラム10の断面図である。図6および図7を参照して、8個の第1突起部31は、ドラム10の側壁から回転軸39に向かって突出している。8個の第1突起部31を等間隔で配置しているので、互いに隣り合う2つの第1突起部31が配置される間隔を、パーツの最大長の3倍としている。
FIG. 6 is a development view of the drum. Referring to FIG. 6, eight
また、第1開口部11から距離L2の位置の円周方向に、第1組を構成する16個の第2突起部33が等間隔で配置され、第1開口部11から距離L3の位置の円周方向に、第2組を構成する16個の第2突起部33が等間隔で配置され、第1開口部11から距離L4の位置の円周方向に、第3組を構成する16個の第2突起部33が等間隔で配置される。第1組〜第3組それぞれの16個の第2突起部33は、同じなので、ここでは第1組に含まれる16個の第2突起部33について説明する。図8は、第1開口部11から距離L2の位置のドラム10の断面図である。図6および図8を参照して、16個の第2突起部33は、ドラム10の側壁から回転軸39方向に突出している。16個の第2突起部33を等間隔で配置しているので、互いに隣り合う2つの第2突起部33が配置される間隔を、パーツの最大長の1.5倍としている。
In addition, sixteen
距離L2は、距離L1より長い。距離L2から距離L1を減算した差分G1は、第1組と第2組との間隔を示し、ドラム10の直径Dと、ドラム10の傾き角である支持角度θとにより定まる。例えば、差分G1は、Dtanθ以上とするのが好ましい。距離L3は、距離L2より長く、距離L3から距離L2を減算した差分G2は、第2組と第3組との間隔を示し、ドラム10の直径Dと、ドラム10の支持角度θとにより定まる。例えば、差分G2は、Dtanθ以上とするのが好ましい。同様に、距離L4は、距離L3より長く、距離L4から距離L3を減算した差分G3は、ドラム10の直径Dと、ドラム10の支持角度θとにより定まる。例えば、差分G3は、Dtanθ以上とするのが好ましい。
The distance L2 is longer than the distance L1. The difference G1 obtained by subtracting the distance L1 from the distance L2 indicates the interval between the first set and the second set, and is determined by the diameter D of the
さらに、第1開口部11から距離L7の位置の円周方向に、第1組を構成する8個の第3突起部35が等間隔で配置され、第1開口部11から距離L6の位置の円周方向に、第2組を構成する16個の第3突起部35が等間隔で配置され、第1開口部11から距離L5の位置の円周方向に、第3組を構成する8個の第3突起部35が等間隔で配置される。第1組〜第3組それぞれの8個の第3突起部35は、同じなので、ここでは第1組に含まれる8個の第3突起部35について説明する。図9は、第1開口部11から距離L7の位置のドラム10の断面図である。図6および図9を参照して、8個の第3突起部35は、ドラム10の側壁から回転軸39方向に突出している。8個の第3突起部35を等間隔で配置しているので、互いに隣り合う2つの第3突起部35が配置される間隔を、パーツの最大長の3倍としている。
Further, eight
距離L5は距離L1より短く、距離L6は距離L5より短く、距離L7は距離L6より短い。距離L6から距離L7を減算した値は、第1組と第2組との間隔を示し、距離L5から距離L6を減算した値は、第2組と第3組との間隔を示す。第1組と第2組との間隔、および第2組と第3組との間隔は、パーツの最大長より大きくするのが好ましい。さらに好ましくは、第1組と第2組との間隔、および第2組と第3組との間隔は、第2突起部33の第1組と第2組の間隔よりも大きくするのが好ましい。
The distance L5 is shorter than the distance L1, the distance L6 is shorter than the distance L5, and the distance L7 is shorter than the distance L6. A value obtained by subtracting the distance L7 from the distance L6 indicates an interval between the first set and the second set, and a value obtained by subtracting the distance L6 from the distance L5 indicates an interval between the second set and the third set. The interval between the first set and the second set, and the interval between the second set and the third set are preferably larger than the maximum length of the parts. More preferably, the interval between the first set and the second set, and the interval between the second set and the third set are preferably larger than the interval between the first set and the second set of the
次に、本実施の形態における絡み部品分離装置1において、ドラム10に第1開口部11から複数のパーツを導入し、モーター21を駆動した場合の複数のパーツの状態について説明する。ここでは、モーター21は、一定の角速度で、同一方向に回転する。第1開口部11からドラム10内に導入された複数のパーツは、ドラム10の第1開口部11が第2開口部13よりも上方なので、重力によって第1開口部11から第2開口部13に向かう方向の力を受け付ける。このため、ドラム10の内壁は、パーツが滑りやすいように研磨されているのが好ましい。
Next, in the entangled
第1開口部11から複数のパーツをドラム10に導入し、モーター21を駆動した段階で、複数のパーツのうち4つ以上のパーツが絡まった多数パーツ群は、8個の第1突起部31のいずれかによって8個の第1突起部31よりも第2開口部13側への移動が制限される。また、複数のパーツのうち3つ以下のパーツが絡まった少数パーツ群は、8個の第1突起部31の間をすり抜けて8個の第1突起部31よりも第2開口部13側へ移動することが可能である。また、複数のパーツのうち他のパーツと絡み合っていない単独のパーツは、8個の第1突起部31の間をすり抜けて8つの第1突起部31よりも第2開口部13側へ移動することが可能である。
At the stage where a plurality of parts are introduced into the
本実施の形態おいては、8個の第1突起部31それぞれの端部の間隔の最小値は、パーツの最大長より大きい。このため、1つのパーツが8個の第1突起部31の2つ以上に同時に絡まることがなく、他のパーツと絡まない単独のパーツが、8個の第1突起部31のいずれとも絡まずに、第2開口部13側に移動する確率を高めることができる。
In the present embodiment, the minimum value of the distance between the end portions of each of the eight
また、多数パーツ群が、8個の第1突起部31の2以上に同時に絡まる場合がある。多数パーツ群が、8個の第1突起部31のうちで絡み合う第1突起部31の数が多くなると、ドラム10の回転中におけるパーツ群の移動が、絡み合った第1突起部31の数と同じ数の方向で規制される。しかしながら、多数パーツ群に含まれる複数のパーツのうち、8個の第1突起部31のいずれかと絡み合う2以上のパーツはすべて異なる。このため、多数パーツ群は、ドラム10の回転に伴って、多数パーツ群を構成する複数のパーツ同士の絡み方が変化し、多数パーツ群の形状が変化する。具体的には、多数パーツ群のうちには、ドラム10の回転に伴って、それまで絡んでいたパーツとの絡みが解消されてパーツ多数パーツ群から離脱するパーツ、それまで絡んでいなかったパーツと絡むパーツ、それまで絡んでいた第1突起部31との絡みが解消されるパーツ、新たに第1突起部31とからむパーツ等が存在する。このため、多数パーツ群は、ドラム10が回転するに伴って、8個の第1突起部31のうちで絡み合っていた第1突起部との絡みが解消される場合もあり、8個の第1突起部31のうちで絡み合っていなかった第1突起部との絡む場合もある。
In addition, a large number of parts groups may be simultaneously entangled with two or more of the eight
このため、多数パーツ群は、ドラム10の回転に伴って、8個の第1突起部31の2以上と絡みながら形状を変化させるので、多数パーツ群から離脱するパーツが発生する。多数パーツ群から離脱するパーツのうち少数パーツ群および他のパーツと絡まない単独のパーツは、8個の第1突起部31の間をすり抜けて8つの第1突起部31よりも第2開口部13側への移動が可能である。
For this reason, the multi-part group changes its shape while being entangled with two or more of the eight
8個の第1突起部31のいずれかに絡まった多数パーツ群は、第1組〜第3組それぞれに属する8個の第3突起部35の少なくとも1つと絡まる。第1組〜第3組それぞれに属する8個の第3突起部35は、8個の第1突起部31のいずれかに絡まった多数パーツ群の全体を、ドラム10の回転に伴って回転させる。これにより、多数パーツ群のうちから分離した単独のパーツ、または少数パーツ群が、第1組〜第3組それぞれに属する8個の第3突起部35および8個の第1突起部31の間をすり抜けて8個の第1突起部31よりも第2開口部13側へ移動することが可能である。
The multiple parts group entangled with any of the eight
ドラム10が第1組〜第3組それぞれに属する8個の第3突起部35を有しない場合、8個の第1突起部31のいずれかに絡まった多数パーツ群は、8個の第1突起部31のいずれかに絡まった部分が第1突起部31から力を受けるが、8個の第1突起部31のいずれとも絡まっていない部分は、それが絡まるパーツから力を受けて回転する。このため、8個の第1突起部31のいずれかに絡まった部分が、第1突起部31から受ける力が、順に他のパーツに伝達されて、多数パーツ群全体が回転する。この際に、互いに絡み合う複数のパーツ間における絡みが強固になってしまう場合がある。
When the
ドラム10が第1組〜第3組それぞれに属する8個の第3突起部35を有する場合は、8個の第1突起部31のいずれかに絡まった多数パーツ群の全体を、ドラム10の回転に伴って回転させるので、多数パーツ群を構成する複数のパーツ間の絡みの力が強くなるのを防止して、多数パーツ群を構成する複数のパーツが多数パーツ群から分離しやすくすることができる。
When the
第1開口部11に投入された複数のパーツのうち、8つの第1突起部31の間を通過して、第1開口部11からの距離L2以上の位置まで到達するパーツは、単独のパーツまたは少数パーツ群である。単独のパーツは、ドラム10が傾いているので、第1〜第3組それぞれの16個の第2突起部33の隙間を通って、重力によって第2開口部13まで移動してドラム10から排出される。少数パーツ群は、第1組を構成する16個の第2突起部33のいずれかによって、第2開口部13への移動が規制される。少数パーツ群は、第1組を構成する16個の第2突起部33のいずれかに絡まり、第2突起部33に絡まったままドラム10の回転によって上方に持ち上げられ、さらに、その後重力によって第2突起部33との絡まりが解消される時点で、下方に落下する。少数パーツ群は、下方に落下するとドラム10の内壁に衝突するので、その外力によって絡まりが解消される場合がある。少数パーツ群を構成する2以上のパーツのうち絡まりが解消された単独のパーツは、重力によって第2開口部13まで移動することが可能である。
Of the plurality of parts put into the
一方、少数パーツ群が落下する位置は、距離L3から距離L2を減算した差分G2がDtanθ以上なので、第2組を構成する16個の第2突起部33のいずれかに絡まる。このため、少数パーツ群のうち他のパーツとの絡まりが解消されていない複数のパーツを構成する新たな少数パーツ群は、第2組を構成する16個の第2突起部33のいずれかにに絡まり、ドラム10の回転によって上方に持ち上げられ、さらに、その後重力によって第2突起部33との絡まりが解消される時点で、下方に落下する。少数パーツ群を構成する2以上のパーツのうち絡まりが解消された単独のパーツは、重力によって第2開口部13まで移動することが可能であるが、少数パーツ群のうち他のパーツとの絡まりが解消されていない複数のパーツを構成する新たな少数パーツ群は、第3組を構成する16個の第2突起部33のいずれかにに絡まり、ドラム10の回転によって上方に持ち上げられ、さらに、その後重力によって第2突起部33との絡まりが解消される時点で、下方に落下する。このように、少数パーツ群を、3回落下させるので、高い確率で少数パーツ群を単独のパーツに分離することができる。なお、ここでは、16個の第2突起部33の組を、3組備える例を説明したが、パーツの形状、材質等によって、組数を変更するようにしてもよい。組数を増加することにより、単独のパーツに分離できる確率を高くすることができる。また、単独のパーツに分離できる確率が所定の値となる場合には、1組であってもよい。
On the other hand, since the difference G2 obtained by subtracting the distance L2 from the distance L3 is equal to or greater than Dtanθ, the position where the minority part group falls is entangled with any of the 16
以上説明したように、本実施の形態における部品分離装置1は、パーツの導入口となる第1開口部11と、パーツの排出口となる第2開口部13とを含む円筒状のドラム10と、ドラム10の側壁からドラムの内側に突出し、ドラムの円周方向に互いに間隔をおいて配置される複数の第1突起部31と、水平方向から支持角度θだけ傾いた回転軸39を中心にドラム10を回転させる駆動機構20と、を備える。このため、第1開口部11に導入されたパーツのうち他のパーツと絡み合った複数のパーツからなるパーツ群は、複数の第1突起部31のいずれかに絡まるので、パーツ群が第2開口部13に移動しないようにすることができる。また、複数の第1突起部31のいずれかに絡まったパーツ群はドラムの回転によって上方に持ち上げられた後に重力によって落下する。このため、落下によって、パーツ群に含まれる複数のパーツのうちには他のパーツとの絡まりが解除される場合がある。このため、互いに絡まったパーツを分離することができる。
As described above, the
また、ドラム10は、複数の第1突起部31より第2開口部13側で円周方向に互いに間隔をおいて配置される複数の第2突起部33を含み、複数の第1突起部31の径方向の長さは、複数の第2突起部33の径方向の長さよりも長い。このため、複数の第1突起部31によって、複数の第2突起部33よりも絡まったパーツの数の多いパーツ群を分離し、複数の第2突起部33によって、複数の第1突起部31によって絡まったパーツ数が減られたパーツ群を分離することができる。そのため、段階的に絡まったパーツの数を減らすので、効率よく絡まったパーツを分離することができる。
The
また、複数の第1突起部31のそれぞれの複数の端部間の距離の最小値は、パーツの最大値より大きいので、1つのパーツが複数の第1突起部31の2以上に同時に絡まないようにすることができ、ドラム10の回転にともなってパーツが動かなくなるのを防止することができる。
Moreover, since the minimum value of the distance between the plurality of end portions of each of the plurality of
また、複数の第1突起部31それぞれがドラムの内壁に配置される間隔は、パーツの最大長より大きいので、他のパーツと絡まない単独のパーツが複数の第1突起部31の間をすり抜けることが可能となり、単独のパーツを第2開口部13から排出することができる。
In addition, since the interval at which each of the plurality of
また、ドラム10は、複数の第1突起部31より第1開口部11側で円周方向に互いに間隔をおいて配置される複数の第3突起部35を、さらに含む。このため、互いに絡まった複数のパーツからなるパーツ群が複数の第1突起部31のいずれかに絡まる場合、パーツ群が複数の第3突起部35にも絡まるので、ドラム10の回転に伴ってパーツ群を回転させることができる。これにより、パーツ群を回転させている間に、互いに絡まった複数のパーツを分離することができる。
In addition, the
なお、本実施の形態においては、8個の第1突起部31を円周方向に等間隔で配置するようにしたが、等間隔でなくてもよい。同様に、第1組〜第3組それぞれを構成する16個の第2突起部33を円周方向に等間隔で配置するようにしたが、等間隔でなくてもよい。さらに、第1組〜第3組それぞれを構成する8個の第3突起部35を、円周方向に等間隔に配置するようにしたが、等間隔でなくてもよい。
In the present embodiment, the eight
<第1の変形例>
上述した実施の形態における絡みパーツ分離装置1は、ドラム10が、8個の第1突起部31よりも第1開口部13側の円周方向に所定の間隔で配置される8個の第3突起部35の組を3組含む場合を例に説明した。第1の変形例における絡みパーツ分離装置1は、複数の第3突起部35が、8個の第1突起部31よりも第1開口部13側の回転軸39と並行な方向に所定の間隔で配置されるようにしたものである。この場合、互いに隣り合う2つの第3突起部35が配置される間隔は、任意に定めることができる。また、複数の第3突起部35の長さは、任意に定めることができる。
<First Modification>
In the entangled
ここでは、第1の変形例における絡みパーツ分離装置1において、ドラム10が、8個の第1突起部31を有し、16個の第2突起部33を1組とした3組を有し、3個の第3突起部35を有する場合を例に説明する。8個の第1突起部31、第1組〜第3組それぞれに属する16個の第2突起部33については、上述した絡みパーツ分離装置1と同じなので、ここでは説明を繰り返さない。
Here, in the entangled
図10は、第1の変形例におけるドラムの展開図である。図10を参照して、3個の第3突起部35は、8個の第1突起部31よりも第1開口部13側の回転軸39と並行な方向に所定の間隔で配置される。
FIG. 10 is a development view of the drum in the first modification. Referring to FIG. 10, the three
次に、第1の変形例における絡み部品分離装置1において、ドラム10に第1開口部11から複数のパーツを導入し、モーター21を駆動した場合の複数のパーツの状態について説明する。第1開口部11から複数のパーツをドラム10に導入し、モーター21を駆動した段階で、複数のパーツのうち4つ以上のパーツが絡まった多数パーツ群は、8個の第1突起部31のいずれかによって8個の第1突起部31よりも第2開口部13側への移動が制限される。
Next, in the entangled
3個の第3突起部35は、8個の第1突起部31よりも第1開口部11側に位置する多数パーツ群を、ドラム10の回転に伴って、上方に移動させる。多数パーツ群が上方へ移動するに伴って、多数パーツ群は、重力によって第3突起部35との絡みが解消され、下方に落下する。多数パーツ群は、下方に落下するとドラム10の内壁に衝突するので、その外力によって絡まりが解消される場合がある。多数パーツ群を構成する複数のパーツのうち絡まりが解消された少数パーツ群または単独のパーツは、次に第3突起部35と絡む前に、8個の第1突起部31の間をすり抜けて8個の第1突起部31よりも第2開口部13側へ移動することが可能である。このように、第3突起部35がドラム10の回転に伴って多数パーツ群を上方へ移動させることにより、多数パーツ群が上方への移動を開始してから落下するまでの間の期間を、少数パーツ群または単独のパーツが、8個の第1突起部31よりも第2開口部13側へ移動する時間として確保することができる。3個の第3突起部35の長さは、多数パーツ群が上方への移動を開始してから落下するまでの間の期間によって定まる。3個の第3突起部35の長さが長いほど、多数パーツ群と絡み合っている時間を長くなるので、多数パーツ群が上方への移動を開始してから落下するまでの間の期間が長くなる。
The three third projecting
第1の変形例における絡み部品分離装置1において、ドラム10は、複数の第1突起部31より第1開口部11側で回転軸39方向に互いに間隔をおいて配置される複数の第3突起部35を、さらに含む。このため、互いに絡まった複数のパーツからなるパーツ群が複数の第1突起部31のいずれかに絡まる場合、パーツ群が複数の第3突起部35にも絡まるので、ドラム10の回転に伴ってパーツ群を上方に持ち上げた後に重力によって落下させることができる。これにより、互いに絡まった複数のパーツを分離することができる。また、パーツ群を上方に持ち上げてから落下させるまでの期間を、複数の第1突起部31より第1開口部11側にある単独のパーツが複数の第1突起部31よりも第2開口部13側に移動するための時間として確保するので、単独のパーツがパーツ群と絡み合うのを防止することができる。
In the entangled
<第2の変形例>
上述した実施の形態における第1組〜第3組それぞれに含まれる8個の第3突起部35の長さをすべて同じにするのではなく、特定の第3突起部35を他の複数の第3突起部35よりも長くするようにしてもよい。例えば、第1組に含まれる8個の第3突起部35のうち1つを特定の第3突起部35とし、第2組に含まれる8個の第3突起部35のうち第1組の特定の第3突起部35との距離が最も近い1つを特定の第3突起部35とし、第3組に含まれる8個の第3突起部35のうち第2組の特定の第3突起部35との距離が最も近い1つを特定の第3突起部35とする。これにより、3つの特定の第3突起部35が、多数パーツ群を上方に持ち上げて落下させることによりパーツを分離させることができるとともに、他の複数の第3突起部35が、多数パーツ群を回転させることにより、パーツを分離させることができる。
<Second Modification>
Rather than making the lengths of the eight
<第3の変形例>
上述した実施の形態においては、複数の第1突起部31、複数の第2突起部33および複数の第3突起部35それぞれは、ドラム10の内壁から垂直に突出する場合を例に説明したが、複数の第1突起部31、複数の第2突起部33および複数の第3突起部35それぞれは、ドラム10の内壁から突出すればよい。好ましくは、複数の第2突起部33および複数の第3突起部35それぞれは、回転軸39に向かって突出する。例えば、複数の第1突起部31、複数の第2突起部33および複数の第3突起部35それぞれは、第1開口部11側に傾いて突出するようにしてもよいし、第2開口部13側に傾いて突出するようにしてもよい。この場合において、複数の第1突起部31それぞれを第2開口部13に投影した像の径方向の長さは、複数の第2突起部33それぞれを第2開口部13に投影した像の径方向の長さよりも長い。
<Third Modification>
In the above-described embodiment, the case where each of the plurality of
<第4の変形例>
上述した実施の形態における絡み部品分離装置1は、8個の第1突起部31を、第1開口部11から距離L1の円周方向に所定の間隔で配置するようにしたが、第1開口部11から距離L1から距離L5までの円筒部分に、円周方向に所定の間隔で配置する配置するようにしてもよい。この場合には、8個の第1突起部31を、千鳥格子状に配置するのが好ましい。具体的には、第1開口部11から距離L1の位置に配置された第1突起部31に対して、それと隣り合う2つの第1突起部31が第1開口部11から距離L1よりも所定の長さだけ長い距離L8の位置に配置され、第1開口部11から距離L8の位置に配置された第1突起部31に対して、それと隣り合う2つの第1突起部31が第1開口部11から距離L1の位置に配置される。また、8個の第1突起部31が配置される間隔は、同じでなくてもよい。
<Fourth Modification>
In the entangled
同様に、第1組〜第3組それぞれを構成する16個の第2突起部33を、円筒部分に円周方向に所定の間隔で配置するようにしてもよい。また、8個の第1突起部31を、第1開口部11から距離L1の円周方向に所定の間隔で配置し、第1組〜第3組それぞれを構成する16個の第2突起部33を、円筒部分に円周方向に所定の間隔で配置するようにしてもよい。また、16個の第2突起部33が配置される間隔は、同じでなくてもよい。
Similarly, the 16
同様に、第1組〜第3組それぞれを構成する8個の第3突起部35を、円筒部分に円周方向に所定の間隔で配置するようにしてもよい。また、8個の第1突起部31を、第1開口部11から距離L1の円周方向に所定の間隔で配置し、第1組〜第3組それぞれを構成する8個の第3突起部35を、円筒部分に円周方向に所定の間隔で配置するようにしてもよい。また、8個の第3突起部35が配置される間隔は、同じでなくてもよい。
Similarly, the eight third projecting
<第5の変形例>
上述した実施の形態における絡み部品分離装置1は、ドラム10の回転軸39が、ドラム10の側壁と並行で、ドラム10の側壁の内側に位置し、ドラム10の側壁からの距離が一定とする場合を例に説明した。
<Fifth Modification>
In the entangled
ドラム10の回転軸39を、ドラム10の側壁と並行で、ドラム10の側壁の外側に位置するようにしてもよい。また、ドラム10の回転軸39を、ドラム10の側壁と並行でない軸としてもよい。
The rotating
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。 The embodiment disclosed this time should be considered as illustrative in all points and not restrictive. The scope of the present invention is defined by the terms of the claims, rather than the description above, and is intended to include any modifications within the scope and meaning equivalent to the terms of the claims.
<付記>
(1) 前記複数の第1突起部は、前記ドラムの前記第1開口部から所定の距離の円周方向に互いに間隔をおいて配置される、請求項2〜8のいずれかに記載の絡み部品分離装置。
(2) 前記複数の第1突起部は、前記ドラムの前記第1開口部からの所定の距離の円筒状の領域の円周方向に互いに間隔を置いて配置される、請求項2〜8のいずれかに記載の絡み部品分離装置。
(3) 前記回転軸は、前記ドラムの側壁と並行である、請求項1〜8のいずれかに記載の絡み部品分離装置。
(4) 前記回転軸は、前記ドラムの側壁の内側に位置する、(3)に記載の絡み部品分離装置。
(5) 前記回転軸は、前記ドラムの側壁からの距離が一定である、(4)に記載の絡み部品分離装置。
<Appendix>
(1) The entanglement according to any one of claims 2 to 8, wherein the plurality of first protrusions are spaced apart from each other in a circumferential direction at a predetermined distance from the first opening of the drum. Parts separator.
(2) The plurality of first protrusions are arranged at intervals in a circumferential direction of a cylindrical region having a predetermined distance from the first opening of the drum. The entangled component separator according to any one of the above.
(3) The entangled component separation device according to any one of
(4) The entangled component separation device according to (3), wherein the rotation shaft is located inside a side wall of the drum.
(5) The entangled component separation device according to (4), wherein the rotation shaft has a constant distance from a side wall of the drum.
1 絡み部品分離装置、10 ドラム、11 第1開口部、13 第2開口部、15 フランジ、20 駆動機構、21 モーター、22 プーリー、23 駆動ベルト、24 第1ローラ、25 第2ローラ、26 ストッパー、26A 軸、26B ローラ、29 基台、31 第1突起部、33 第2突起部、35 第3突起部、39 回転軸。
DESCRIPTION OF
Claims (5)
前記ドラムの側壁から前記ドラムの内側に突出する複数の突起部と、
前記第1開口部の中心が前記第2開口部の中心より高い状態で、重力方向と交わる回転軸を中心に前記ドラムを回転させる駆動機構と、を備えた絡み部品分離装置。 A cylindrical drum including a first opening serving as an introduction port for parts and a second opening serving as a discharge port for the parts;
A plurality of protrusions protruding from the side wall of the drum to the inside of the drum;
And a drive mechanism that rotates the drum about a rotation axis that intersects the direction of gravity in a state where the center of the first opening is higher than the center of the second opening.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016162558A JP6304570B2 (en) | 2016-08-23 | 2016-08-23 | Tangled parts separator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016162558A JP6304570B2 (en) | 2016-08-23 | 2016-08-23 | Tangled parts separator |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015137767A Division JP6183722B2 (en) | 2015-07-09 | 2015-07-09 | Tangled parts separator |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017019665A true JP2017019665A (en) | 2017-01-26 |
| JP2017019665A5 JP2017019665A5 (en) | 2017-05-18 |
| JP6304570B2 JP6304570B2 (en) | 2018-04-04 |
Family
ID=57888897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016162558A Active JP6304570B2 (en) | 2016-08-23 | 2016-08-23 | Tangled parts separator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6304570B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112357518A (en) * | 2020-11-02 | 2021-02-12 | 浙江环力智能科技股份有限公司 | Jump ring autosegregation machine |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4853060U (en) * | 1971-10-22 | 1973-07-09 | ||
| JPS4852579A (en) * | 1971-11-17 | 1973-07-24 | ||
| JPS5983100U (en) * | 1982-11-29 | 1984-06-05 | 日本電気ホームエレクトロニクス株式会社 | Parts alignment and feeding device |
| JPH10236633A (en) * | 1997-02-26 | 1998-09-08 | Kao Corp | Article distributedly feeding device |
| JP2005255312A (en) * | 2004-03-10 | 2005-09-22 | Nec Saitama Ltd | Complicated shape component intertwist removing device |
-
2016
- 2016-08-23 JP JP2016162558A patent/JP6304570B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4853060U (en) * | 1971-10-22 | 1973-07-09 | ||
| JPS4852579A (en) * | 1971-11-17 | 1973-07-24 | ||
| JPS5983100U (en) * | 1982-11-29 | 1984-06-05 | 日本電気ホームエレクトロニクス株式会社 | Parts alignment and feeding device |
| JPH10236633A (en) * | 1997-02-26 | 1998-09-08 | Kao Corp | Article distributedly feeding device |
| JP2005255312A (en) * | 2004-03-10 | 2005-09-22 | Nec Saitama Ltd | Complicated shape component intertwist removing device |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112357518A (en) * | 2020-11-02 | 2021-02-12 | 浙江环力智能科技股份有限公司 | Jump ring autosegregation machine |
| CN112357518B (en) * | 2020-11-02 | 2022-11-18 | 浙江环力智能科技股份有限公司 | Jump ring autosegregation machine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6304570B2 (en) | 2018-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6304570B2 (en) | Tangled parts separator | |
| JP2007145415A (en) | Feeder and calculation filling machine | |
| EP3650378A1 (en) | Aligning and feeding device | |
| JP6183722B2 (en) | Tangled parts separator | |
| JP2013144599A (en) | Vibrating type parts supply device | |
| JP6347525B2 (en) | Tangled parts separator | |
| JP4237978B2 (en) | Parts feeder | |
| JP5379114B2 (en) | Parts feeder | |
| JP4808930B2 (en) | Parts feeder | |
| KR20190027244A (en) | Tablet Discharge Chute | |
| CN107585359A (en) | Round roller formula CapsuleorientingUturnmachine | |
| KR101768551B1 (en) | Apparatus for Sorting Brush Heads | |
| JP2019119603A (en) | Aligned supply part feeder | |
| JPH06575B2 (en) | Vibration part feeder | |
| JP6456718B2 (en) | Spherical parts feeder | |
| US867744A (en) | Magnetic separator. | |
| JP6248982B2 (en) | Separation method and separation apparatus | |
| JP2006151451A (en) | Tablet feeder, and counting and filling machine | |
| JP4234128B2 (en) | Parts feeder | |
| JP2860467B2 (en) | Work separation device | |
| JP6836785B2 (en) | Multi-feeder | |
| KR200335832Y1 (en) | Pill sorting apparatus | |
| JP5065612B2 (en) | How to sort frustum-shaped candy | |
| KR20050101261A (en) | Prawn separator | |
| JP4234037B2 (en) | Parts feeder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6304570 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |