JP2017013625A - 電動パワーステアリング装置の制御装置 - Google Patents
電動パワーステアリング装置の制御装置 Download PDFInfo
- Publication number
- JP2017013625A JP2017013625A JP2015132078A JP2015132078A JP2017013625A JP 2017013625 A JP2017013625 A JP 2017013625A JP 2015132078 A JP2015132078 A JP 2015132078A JP 2015132078 A JP2015132078 A JP 2015132078A JP 2017013625 A JP2017013625 A JP 2017013625A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- current value
- handle
- return
- midpoint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007935 neutral effect Effects 0.000 description 27
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005259 measurement Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images



Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】アシスト演算部13は、基本アシスト電流値設定部15により設定される基本アシスト電流値とハンドル戻り用電流値設定部16により設定されるハンドル戻り用電流値とを加算し、その加算値を目標アシスト電流値に設定する。基本アシスト電流値は、操舵トルクに基づいて設定される。ハンドル戻り用電流値は、舵角に基づいて設定される。そして、アシスト演算部13は、目標アシスト電流値と電動モータMに実際に流れる電流との差に応じた制御信号をモータ駆動回路11に与える。これにより、目標アシスト電流値に相当する駆動電流がモータ駆動回路11から電動モータMに供給される。
【選択図】図1
Description
(2)ハンドル戻り用基本電流値の絶対値が車両流れを生じさせる値である。
(3)舵角速度の絶対値が所定値以下である。
(4)(1)〜(3)の各条件が満たされた状態が車両流れを許容可能な時間にわたって継続する。
2 ステアリング機構
5 ECU(制御装置)
6 トルクセンサ(トルク取得手段)
7 舵角センサ(舵角取得手段)
11 モータ駆動回路(モータ制御手段)
13 アシスト演算部(モータ制御手段)
15 基本アシスト電流値設定部(基本アシスト電流値設定手段)
16 ハンドル戻り用電流値設定部(中点戻り用電流値設定手段)
M 電動モータ
Claims (1)
- 電動モータの駆動力をステアリング機構に伝達することにより操舵を補助する電動パワーステアリング装置に用いられる制御装置であって、
操舵トルクを取得するトルク取得手段と、
舵角中点に対する舵角を取得する舵角取得手段と、
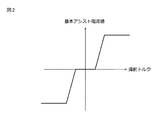
前記操舵トルク取得手段により取得される操舵トルクに基づいて、当該操舵トルクに応じた方向に前記電動モータの駆動力を発生させる基本アシスト電流値を設定する基本アシスト電流値設定手段と、
前記舵角取得手段により取得される舵角に基づいて舵角速度を演算する舵角速度演算手段と、
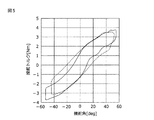
前記舵角速度演算手段により演算される舵角速度に基づいて、前記舵角取得手段により取得される舵角にヒステリシスを付与し、当該ヒステリシスが付与された舵角に基づいて、前記電動モータの駆動力を発生させる中点戻り用電流値を設定する中点戻り用電流値設定手段と、
前記基本アシスト電流値設定手段により設定される基本アシスト電流値と前記中点戻り用電流値設定手段により設定される中点戻り用電流値とを加算し、当該加算値に基づいて、前記電動モータを制御するモータ制御手段とを含む、制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132078A JP6505526B2 (ja) | 2015-06-30 | 2015-06-30 | 電動パワーステアリング装置の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132078A JP6505526B2 (ja) | 2015-06-30 | 2015-06-30 | 電動パワーステアリング装置の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017013625A true JP2017013625A (ja) | 2017-01-19 |
| JP6505526B2 JP6505526B2 (ja) | 2019-04-24 |
Family
ID=57829633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015132078A Active JP6505526B2 (ja) | 2015-06-30 | 2015-06-30 | 電動パワーステアリング装置の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6505526B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6308342B1 (ja) * | 2017-02-02 | 2018-04-11 | 日本精工株式会社 | 電動パワーステアリング装置 |
| WO2018142650A1 (ja) * | 2017-02-02 | 2018-08-09 | 日本精工株式会社 | 電動パワーステアリング装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002019631A (ja) * | 2000-07-06 | 2002-01-23 | Toyota Central Res & Dev Lab Inc | 操舵装置および操舵反力設定方法 |
| JP2002029441A (ja) * | 2000-07-19 | 2002-01-29 | Mitsubishi Electric Corp | 電動式ステアリング装置の制御装置 |
| US20140288778A1 (en) * | 2011-10-27 | 2014-09-25 | Jaguar Land Rover Limited | Closed loop epas systems |
-
2015
- 2015-06-30 JP JP2015132078A patent/JP6505526B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002019631A (ja) * | 2000-07-06 | 2002-01-23 | Toyota Central Res & Dev Lab Inc | 操舵装置および操舵反力設定方法 |
| JP2002029441A (ja) * | 2000-07-19 | 2002-01-29 | Mitsubishi Electric Corp | 電動式ステアリング装置の制御装置 |
| US20140288778A1 (en) * | 2011-10-27 | 2014-09-25 | Jaguar Land Rover Limited | Closed loop epas systems |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6308342B1 (ja) * | 2017-02-02 | 2018-04-11 | 日本精工株式会社 | 電動パワーステアリング装置 |
| WO2018142650A1 (ja) * | 2017-02-02 | 2018-08-09 | 日本精工株式会社 | 電動パワーステアリング装置 |
| WO2018142905A1 (ja) * | 2017-02-02 | 2018-08-09 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6428965B1 (ja) * | 2017-02-02 | 2018-11-28 | 日本精工株式会社 | 電動パワーステアリング装置 |
| CN110139793A (zh) * | 2017-02-02 | 2019-08-16 | 日本精工株式会社 | 电动助力转向装置 |
| US10618548B2 (en) | 2017-02-02 | 2020-04-14 | Nsk Ltd. | Electric power steering apparatus |
| CN110139793B (zh) * | 2017-02-02 | 2021-05-07 | 日本精工株式会社 | 电动助力转向装置 |
| US11214298B2 (en) | 2017-02-02 | 2022-01-04 | Nsk Ltd. | Electric power steering apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6505526B2 (ja) | 2019-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102071779B1 (ko) | 파워 스티어링 장치의 제어 장치 및 파워 스티어링 장치 | |
| US9002579B2 (en) | Steering assist device | |
| JP7099892B2 (ja) | 操舵制御装置 | |
| US20200307680A1 (en) | Steering control device | |
| US8229627B2 (en) | Vehicle steering apparatus | |
| JP4380697B2 (ja) | 車両用操舵制御装置 | |
| JP6694435B2 (ja) | 電気動力補助ステアリング・システム | |
| JP2007106283A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2020142596A (ja) | 操舵制御装置 | |
| JP2013001370A (ja) | 操舵制御装置 | |
| JP2016107711A (ja) | 制御装置 | |
| US11142243B2 (en) | Steering control device | |
| JP2007186169A (ja) | 電動パワーステアリング装置 | |
| JP6843907B2 (ja) | 電力支援式ステアリングシステム | |
| CN104015799A (zh) | 电动转向设备 | |
| US20200307681A1 (en) | Steering control device | |
| US8838340B2 (en) | Electric power steering system | |
| JP5181563B2 (ja) | 車両用操舵装置 | |
| JP2004338562A (ja) | 電動パワーステアリング制御装置 | |
| JP2017013625A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP7307000B2 (ja) | 操舵制御装置 | |
| JP5401875B2 (ja) | 車両用舵角検出装置及びこれを使用した電動パワーステアリング装置 | |
| JP6303762B2 (ja) | 電動パワーステアリング制御装置 | |
| JP2020006832A (ja) | 操舵制御装置 | |
| JP2019127219A (ja) | 操舵制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180516 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190327 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6505526 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |