JP2016208331A - 作業支援システム - Google Patents
作業支援システム Download PDFInfo
- Publication number
- JP2016208331A JP2016208331A JP2015088925A JP2015088925A JP2016208331A JP 2016208331 A JP2016208331 A JP 2016208331A JP 2015088925 A JP2015088925 A JP 2015088925A JP 2015088925 A JP2015088925 A JP 2015088925A JP 2016208331 A JP2016208331 A JP 2016208331A
- Authority
- JP
- Japan
- Prior art keywords
- work
- index
- unit
- additional information
- procedure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Abstract
【課題】作業者の視線を作業対象に向かって誘導する誘導用の付加情報を表示することで、作業者の視線を作業対象に移させて当該作業対象に関する付加情報を作業者に対して提供する。【解決手段】撮影部6で撮影された映像に含まれる指標を検出して、当該指標の座標から撮影部6の撮影範囲19を決定する指標認識部11と、作業対象5の座標から当該作業対象5が当該撮影範囲19内に入っているか否かを判定し、入っていると判定した場合に、当該作業対象5を強調表示する強調表示用の付加情報15を表示し、一方、入っていないと判定した場合に、作業者4の視線を作業対象5に向かって誘導する誘導用の付加情報16を表示するように映像表示部7を制御する表示制御部12とを備えている。【選択図】図5
Description
この発明は、作業支援システムに関し、特に、AR(Augmented Reality : AR(拡張現実))を用いて作業者の作業を支援するための作業支援システムに関する。
平面の盤面に広範囲に配置されたスイッチ等の操作対象を順に操作していく場合に、作業者に対して、当該作業対象を含む実映像に対して付加情報を付加した映像を提示することで、作業を補助する手段として、頭部装着式の映像表示装置、すなわち、HMD(Head Mount Display)が開発されている。このHMDを用いることで、作業者は両手を用いた作業が可能である。
上記の映像表示装置として、コンピュータ一・グラフィックスを利用して、現実映像にバ−チャルな付加映像を加えて表示するAR技術(Augmented Reality:AR)を用いた映像表示システムが開発されてきている。また、このAR技術を用いた映像表示システムにより、作業者の作業を支援することが提案されている。なお、ARとは、拡張現実の略称で、人が認識できる現実世界をコンピュータ等を用いて拡張する技術、または、拡張された現実世界そのものを意味する。代表的なものとしては、例えば、現実に存在する机の上に、実際には存在しないキャラクターをあたかもその場に存在するように表示するものなどがある。
付加情報を表示する為の指標として、予め設定された形状の図形を用いる。当該図形を作業者が予め認識しておくことによって、その図形を付加映像として表示することで、作業者に対して付加情報を提示することができる。
特許文献1には、作業対象近傍に指標を配置し、システムがカメラ画像中の指標を認識することで、指標の近傍にある作業対象がカメラの検知範囲(視野)内にあること、すなわち、作業者の視野内にあることを判断する映像システムが記載されている。当該映像システムでは、作業対象が作業者の視野内にあるかないかに応じて、現実映像に付加する映像を切り替えることで、作業者が容易に作業を行うことができる。
上記の特許文献1に記載の映像システムでは、カメラの視野に指標が入った場合に、付加情報を表示する構成となっている。従って、カメラの視野に指標が入らなければ、作業者に付加情報を提供しないので、作業者に対して適切に作業を促すことができない。従って、作業者にとって作業対象が明確でなく、自身で作業対象に視線を向けられない場合には、付加情報が提供されないため、作業者の視線を作業対象に誘導する必要がある。
たとえば、幅数メートル程度、高さ1メートル程度の平な壁面に広範囲に設置された作業対象を操作するような場合、作業対象がどこにあるのかの把握が難しいことがある。
特に、作業者に作業経験がなく作業を熟知していない場合や、普段実施しない作業を指示するような場合に、複数の作業対象があるときには、効率的に作業を進めさせるために次の作業対象がどれかを指示するためには、作業対象に作業者の視線を誘導することが有効である。
しかしながら、特許文献1では、作業対象に作業者の視線を誘導することについては記載されておらず、作業対象がどこにあるのかの把握が難しい状況では、作業者に付加情報が提供できず、作業者に対して適切に作業を促すことができないという問題点があった。
本発明は、かかる問題点を解決するためになされたもので、作業対象と同じ平面に複数の指標を配置し、撮影部が撮影した映像に含まれる指標の座標から前記撮影部の撮影範囲を決定し、撮影範囲内に作業対象が入っていない場合には、作業者の視線を前記作業対象に向かって誘導する誘導用の付加情報を表示することで、作業者が迷わず作業対象に視線を移し、当該作業対象に関する付加情報を作業者に対して提供することができる作業支援システムを提供することを目的としている。
この発明は、作業対象が設置されている平面上に等間隔で配置される指標と、前記指標を含む映像を撮影する撮影部と、前記作業対象の作業者に対して、作業を支援するための付加情報を表示する映像表示部と、前記平面上の同一座標系で定義した前記作業対象の座標と前記指標の座標とを予め記憶する記憶部と、前記撮影部で撮影された前記映像に含まれる前記指標を検出して、当該指標の座標を前記記憶部から取得することで、前記撮影部の撮影範囲を決定する指標認識部と、前記作業対象の座標を前記記憶部から取得して、前記指標認識部で決定された前記撮影部の前記撮影範囲内に前記作業対象が入っているか否かを判定する判定部と、前記判定部によって前記作業対象が前記撮影範囲内に入っていると判定された場合に、前記作業対象を強調表示する強調表示用の付加情報を表示し、前記判定部によって前記作業対象が前記撮影範囲内に入っていないと判定された場合に、前記作業者の視線を前記作業対象に向かって誘導する誘導用の付加情報を表示するように、前記映像表示部を制御する表示制御部とを備えた作業支援システムである。
この発明の作業支援システムによれば、作業対象と同じ平面に複数個の指標を配置し、撮影部が撮影した映像に含まれる指標の座標から当該撮影部の撮影範囲を決定し、撮影範囲内に作業対象が入っていない場合には、作業者の視線を当該作業対象に向かって誘導するように誘導用の付加情報を表示するようにしたので、作業者が迷わず作業対象に視線を移すことで、当該作業対象の作業に関する付加情報を作業者に対して提供することができる。
この発明は、AR技術を用いて付加情報を示すことで、作業者の作業を支援するための作業支援システムである。この発明に係る作業支援システムでは、付加情報により作業手順や作業内容を示すだけでなく、作業者にとって作業対象が明確でない場合に、付加情報により、作業者の視線を作業対象まで誘導することを特徴とする。具体的には、作業対象と共に、その周囲に指標を配置し、撮影部が常に指標をとらえられるような構成とし、作業対象と指標を同じ座標上で表現し、作業者の視野内に作業対象が入っていないと判断された場合に、視線誘導のための付加情報を表示することで、作業者が迷わず作業対象に視線を移し、作業手順や作業内容を示す付加情報を得ることができる。
実施の形態1.
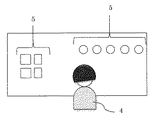
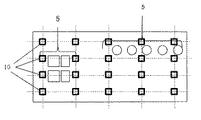
図4は、この発明の実施の形態1における、作業対象5を示した図である。作業者4は、予め決められた作業手順に従って、各作業対象5に対する作業を行う。本実施に係る作業支援システムは、作業者4が作業対象5に対して作業を行う際に、当該作業を支援するための付加情報の表示を作業者4に対して行うものである。本実施の形態においては、作業支援システムとして、映像表示装置を例に挙げて説明する。また、作業対象5の例としては、例えば、押釦、スイッチ、レバーなどが挙げられる。本実施の形態では、図4に示すように、作業対象5が壁面に設置されている場合を例に挙げて説明する。しかしながら、その場合に限らず、作業対象5は、机上などの他の平面上に設置されていてもよい。作業対象5の周囲には、図8に示すように、複数の指標10が配置されている。これらの指標10は、作業対象5が配置されている同じ壁面に、アレイ状に等間隔に配置されている。ただし、横方向の配置間隔と縦方向の配置間隔とは同じであってもよいが、図8の例にように異なっていてもよい。すなわち、図8の例では、横方向の配置間隔の方が、縦方向の配置間隔よりも広くなっている。
図4は、この発明の実施の形態1における、作業対象5を示した図である。作業者4は、予め決められた作業手順に従って、各作業対象5に対する作業を行う。本実施に係る作業支援システムは、作業者4が作業対象5に対して作業を行う際に、当該作業を支援するための付加情報の表示を作業者4に対して行うものである。本実施の形態においては、作業支援システムとして、映像表示装置を例に挙げて説明する。また、作業対象5の例としては、例えば、押釦、スイッチ、レバーなどが挙げられる。本実施の形態では、図4に示すように、作業対象5が壁面に設置されている場合を例に挙げて説明する。しかしながら、その場合に限らず、作業対象5は、机上などの他の平面上に設置されていてもよい。作業対象5の周囲には、図8に示すように、複数の指標10が配置されている。これらの指標10は、作業対象5が配置されている同じ壁面に、アレイ状に等間隔に配置されている。ただし、横方向の配置間隔と縦方向の配置間隔とは同じであってもよいが、図8の例にように異なっていてもよい。すなわち、図8の例では、横方向の配置間隔の方が、縦方向の配置間隔よりも広くなっている。
図5は、本実施の形態に係る映像表示装置の内部構成を示したブロック図である。映像表示装置は、図5に示すように、指標10を含む周囲の映像を撮影する例えばカメラ等から構成された撮影部6と、作業者4に対して付加情報を表示する例えばLCD(液晶ディスプレイ)等の透過型の表示装置から構成された映像表示部7と、それらを制御するための処理装置8と、作業者4が作業手順の一手順ごとの終了を処理装置8に入力するためのスイッチ9とからなる。
処理装置8は、記憶装置(図示せず)を有し、当該記憶装置に記憶されたプログラムを実行するCPU及びシステムLSI等の処理回路から構成されている。処理装置8に搭載された当該プログラムは、指標認識部11と、表示制御部12と、手順管理部13とを構成している。
指標認識部11は、撮影部6によって撮影された映像の中の指標10を検出することで、撮影部6の撮影範囲を算出する。指標認識部11は、撮影した映像に含まれる指標10の座標から作業対象5と指標10とが配置された壁面上の撮影部6の撮影範囲を算出する。この際に、指標認識部11は、当該指標10の座標だけでなく、当該指標10の角度と大きさにも基づいて、作業対象5および指標10が配置された壁面上での、撮影部6の撮影範囲の大きさ、形状、および、角度を算出する。
表示制御部12は、指標認識部11と手順管理部13とからの情報に基づく作業者4に対する付加情報を表示するように映像表示部7を制御する。
手順管理部13は、作業者4によって操作されるスイッチ9からの信号を受けて、予め決められた作業手順に基づく手順番号を順に表示制御部12に入力する。
なお、指標認識部11、表示制御部12、および、手順管理部13の詳細な動作については、後述する。
指標認識部11は、撮影部6によって撮影された映像の中の指標10を検出することで、撮影部6の撮影範囲を算出する。指標認識部11は、撮影した映像に含まれる指標10の座標から作業対象5と指標10とが配置された壁面上の撮影部6の撮影範囲を算出する。この際に、指標認識部11は、当該指標10の座標だけでなく、当該指標10の角度と大きさにも基づいて、作業対象5および指標10が配置された壁面上での、撮影部6の撮影範囲の大きさ、形状、および、角度を算出する。
表示制御部12は、指標認識部11と手順管理部13とからの情報に基づく作業者4に対する付加情報を表示するように映像表示部7を制御する。
手順管理部13は、作業者4によって操作されるスイッチ9からの信号を受けて、予め決められた作業手順に基づく手順番号を順に表示制御部12に入力する。
なお、指標認識部11、表示制御部12、および、手順管理部13の詳細な動作については、後述する。
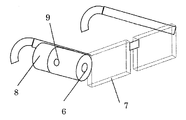
図6は、図5に示した本実施の形態に係る映像表示装置の外形を示した斜視図である。図6において、図5に示した構成と同じ構成については、同一符号を付して示している。本実施の形態に係る映像表示装置は、図6に示すように、眼鏡型の形状を有している。一般的な眼鏡のレンズに相当する部分に、本実施の形態に係る映像表示装置の映像表示部7が設けられている。また、一般的な眼鏡のつるに相当する部分に、本実施の形態に係る映像表示装置の撮影部6と処理装置8とスイッチ9とが設けられている。
映像表示装置は、このように眼鏡型の形状を有しているので、眼鏡をかけるときのように、図7に示すように、作業者4は、頭部14に映像表示装置を装着して、固定した状態で使用する。これにより、作業者4の両手がふさがれることがなく自由であるので、作業者4の作業を妨げることはない。
映像表示装置は、このように眼鏡型の形状を有しているので、眼鏡をかけるときのように、図7に示すように、作業者4は、頭部14に映像表示装置を装着して、固定した状態で使用する。これにより、作業者4の両手がふさがれることがなく自由であるので、作業者4の作業を妨げることはない。
このように、映像表示装置は作業者4の頭部14に固定されるため、映像表示部7は、作業者4の眼前に配置され、作業者4の視界を覆うことになる。従って、作業者4は、映像表示部7を介して現実世界を見ることになるので、映像表示部7に付加情報が表示されると、作業者4は、現実世界に当該付加情報を重ねてみることになる。
このように、作業者4の眼前に映像表示部7が配置される構成であればよいため、映像表示装置は、眼鏡型に限定されることはなく、例えば、溶接マスクのようなヘルメット型のものや、遮光フィルタレンズ付きの帽子のような帽子型の形状であってもよい。
映像表示装置の撮影部6は、作業者4の頭部14に、作業者4前方の視界が撮影できるように配置される。図6では、頭部14の側面に撮影部6を搭載した例が示されているが、作業者4の前方を撮影できる位置であれば、図6に示す側面に設ける場合に限らず、頭部14前面や頭部14の頭頂部などに撮影部6を設けるようにしても良い。同様に、処理装置8も、図6に示す側面に設ける場合に限らず、頭部14前面や頭部14の頭頂部などに設けるようにしても良い。
スイッチ9は、作業者4が作業手順のうちの一手順が終了するたびごとに、作業者4により押釦される。スイッチ9は、作業者4によって押釦されると、処理装置8に対して信号を出力する。スイッチ9は、図6に示す側面に設ける場合に限らず、頭部14前面や頭部14の頭頂部などに設けるようにしても良いが、作業者4が押釦しやすい位置に設けることが望ましい。
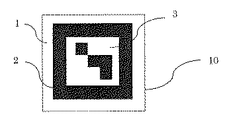
図1は、指標10の一例を示している。指標10は、図1に示すように、周囲の余白1と、正方形の太い黒枠2と、その内側に描かれるパターン3とからなる。余白1は、指標10が周囲から独立して認識されるのに十分な幅を持つものとする。パターン3は、図2のパターンA,B,Cのように、互いに異なる複数の種類が設定可能である。パターン3は、各指標10ごとに固有のものであり、他の指標10と重複することはない。従って、指標認識エンジンにパターン3の種類を各指標10ごとに予め登録しておくことにより、各指標10は互いに識別され一意に特定されることが可能である。これらのパターン3は、通常黒色と白色で構成されるが、周囲や余白と区別が可能であれば、他の色を用いても良い。なお、指標認識エンジンとは、パターン3をもとに、指標10を識別して一意に特定することができる検索ツールのことである。また、パターン3の識別には、色の違いを用いても良い。パターン3は、図1及び図2では、3×3の2次元バーコードから構成されているが、その場合に限らず、パターン3の種類が識別可能なものであれば、任意のものを使用することができる。
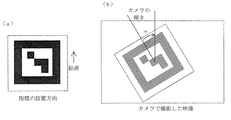
また、パターン3は、上下左右が判別可能なように設定されているものとし、図3(a)の矢印方向で示される鉛直方向の向きが常に上向きの方向になるように一定の向きに設置される。これにより、図3(b)のように、撮影部6が指標10を撮影した際に、その映像における指標10の上向きの方向が当該映像の鉛直方向に対して傾きαを有していた場合には、その傾きαの値から、撮影部6の撮影時の傾きを相対的に検出可能である。
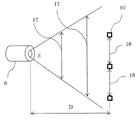
また、各指標10はすべて同じ大きさを有し、図8に示すように、作業対象5が配置されている壁面に、等間隔にアレイ状に配置されている。また、各指標10は、固有のパターン3を1つ含んでいる。パターン3は、上述したように、各指標10ごとに固有のものである。指標10は、撮影部6の撮影範囲の大きさや角度を決定する際に用いられる基準であるため、指標10の配置間隔は、常に1つの指標10が撮影部6の撮影範囲に入るように、適宜設定される必要がある。すなわち、作業者4が通常作業を行う位置に存在すると仮定して、その場合に、常に1つ以上の指標10が撮影部6の撮影範囲に入るように、指標10の配置間隔は設定される。なお、図14に示すように、撮影部6の撮影範囲を決定する視野幅17は、撮影部6の視野角βと、撮影部6と作業対象5が配置されている壁面との間の距離Dと、に依存する。距離Dは、作業者4が通常作業を行う位置として測定すればよいが、指標10が余裕をもって撮影部6の撮影範囲内に入る為には、距離Dを実際よりも小さくした場合の視野幅17を考慮して、指標10の配置間隔18を設定することがより望ましい。
また、作業対象5及び指標10が配置されている壁面上に定めた一点を原点として、たとえば2次元直交座標系を定義し、各作業対象5が配置されている座標を、図15に示す作業対象座標テーブルとして、処理装置8の記憶装置内に保存しておく。座標系は直交座標系に限らず、たとえば、極座標系または円筒座標系のような他の系を選択してもよい。
作業対象座標テーブルにおいては、図15に示すように、各作業対象5の名称とその座標とが対応付けられて記憶されている。
作業対象座標テーブルにおいては、図15に示すように、各作業対象5の名称とその座標とが対応付けられて記憶されている。
また、指標10の座標も、作業対象5と同一座標上に定義し、図16に示す指標配置座標テーブルとして、処理装置8の記憶装置内に保存しておく。
指標配置座標テーブルにおいては、図16に示すように、各指標10に含まれるパターン3と各指標10の座標とが対応付けられて記憶されている。
指標配置座標テーブルにおいては、図16に示すように、各指標10に含まれるパターン3と各指標10の座標とが対応付けられて記憶されている。
また、作業手順を示す手順番号は、作業対象5の名称で定義される。手順番号も、図17に示す作業手順テーブルとして管理され、処理装置8の記憶装置内に保存しておく。図17の作業手順テーブルでは、各手順番号が、作業手順の順序で記憶されている。なお、手順番号は、作業対象5の名称だけで定義してもよいが、図17の例に示すように、作業対象5の名称とそれに対する作業説明とで定義するようにしてもよい。
作業手順テーブルにおいては、図17に示すように、作業手順を示す手順番号ごとに、当該手順番号に対応する、作業対象5の名称とその作業説明の情報とが手順番号に対応付けられて記憶されている。
作業手順テーブルにおいては、図17に示すように、作業手順を示す手順番号ごとに、当該手順番号に対応する、作業対象5の名称とその作業説明の情報とが手順番号に対応付けられて記憶されている。
手順管理部13は、作業者4が作業を開始した場合に、図9に示すフローに従い、作業手順の手順番号を、作業の進行に合わせて、表示制御部12に順次入力する。その動作を以下に詳細に説明する。
図9に示すように、作業者4が作業を開始した場合に、手順管理部13は、まず、ステップS1で、手順番号Nに、初期値の「1」を設定する。作業を開始したか否かの判定は、例えば、映像表示装置の電源がONされたことに基づいて行うようにすればよい。映像表示装置の電源スイッチはスイッチ9と別個に設けてもよいが、スイッチ9の長押しにより電源のON/OFFが切り替えられる構成としておいてもよい。
次に、手順管理部13は、ステップS2で、当該手順番号N(=1)を表示制御部12に入力する。
次に、手順管理部13は、ステップS3で、作業者4がスイッチ9を押すまで待機する。なお、このスイッチ9は、上述したように、作業者4が1つの作業を終了するたびに、作業者4によって押されるスイッチである。
ステップS3でスイッチ9が押されたと判定した場合には、ステップS4に進む。
ステップS4では、手順管理部13は、現在のNの値に基づいて、最後の作業まですべての作業が終了したか否かを判定する。判定の結果、最後の作業まで終了していた場合には、そのまま処理を終了し、一方、最後の作業まで終了しておらず、まだ作業が残っている場合には、ステップS5に進む。
ステップS5では、手順番号Nに1を追加して、手順番号Nをインクリメントして、ステップS2の処理に戻る。
こうして、作業者4が1つの作業を終了させるたびに、作業手順における次の手順番号Nが手順管理部13から表示制御部12に入力される。
図9に示すように、作業者4が作業を開始した場合に、手順管理部13は、まず、ステップS1で、手順番号Nに、初期値の「1」を設定する。作業を開始したか否かの判定は、例えば、映像表示装置の電源がONされたことに基づいて行うようにすればよい。映像表示装置の電源スイッチはスイッチ9と別個に設けてもよいが、スイッチ9の長押しにより電源のON/OFFが切り替えられる構成としておいてもよい。
次に、手順管理部13は、ステップS2で、当該手順番号N(=1)を表示制御部12に入力する。
次に、手順管理部13は、ステップS3で、作業者4がスイッチ9を押すまで待機する。なお、このスイッチ9は、上述したように、作業者4が1つの作業を終了するたびに、作業者4によって押されるスイッチである。
ステップS3でスイッチ9が押されたと判定した場合には、ステップS4に進む。
ステップS4では、手順管理部13は、現在のNの値に基づいて、最後の作業まですべての作業が終了したか否かを判定する。判定の結果、最後の作業まで終了していた場合には、そのまま処理を終了し、一方、最後の作業まで終了しておらず、まだ作業が残っている場合には、ステップS5に進む。
ステップS5では、手順番号Nに1を追加して、手順番号Nをインクリメントして、ステップS2の処理に戻る。
こうして、作業者4が1つの作業を終了させるたびに、作業手順における次の手順番号Nが手順管理部13から表示制御部12に入力される。
次に、上記の図9のフローにおけるステップS2で、手順管理部13から表示制御部12に手順番号Nが入力された場合の表示制御部12の動作について説明する。
上記の図9のフローにおけるステップS2で、手順管理部13から表示制御部12に手順番号Nが入力されると、表示制御部12は、図17の作業手順テーブルを参照して、手順番号Nに対応する作業対象5の作業対象名およびその作業説明の情報を取得するとともに、当該作業対象名に対応する作業対象5の座標を、図15の作業対象座標テーブルから取得する。こうして、表示制御部12は、図12または図13に示すように、取得した作業説明を示す付加情報20を、映像表示部7に表示する。図12,13の例では、付加情報20として、作業対象Aの作業説明である「作業対象Aを押してください。」という文字メッセージが表示されている。
上記の図9のフローにおけるステップS2で、手順管理部13から表示制御部12に手順番号Nが入力されると、表示制御部12は、図17の作業手順テーブルを参照して、手順番号Nに対応する作業対象5の作業対象名およびその作業説明の情報を取得するとともに、当該作業対象名に対応する作業対象5の座標を、図15の作業対象座標テーブルから取得する。こうして、表示制御部12は、図12または図13に示すように、取得した作業説明を示す付加情報20を、映像表示部7に表示する。図12,13の例では、付加情報20として、作業対象Aの作業説明である「作業対象Aを押してください。」という文字メッセージが表示されている。
一方、このとき、指標認識部11は、撮影部6が撮影した映像を撮影部6から取得する。指標認識部11は、当該映像に含まれる指標10のパターン3の種類に基づいて、指標10の座標を図16の指標配置座標テーブルから取得する。また、指標認識部11は、撮影部6で撮影された映像に含まれる指標10の傾きを示す角度αと指標10の映像内での見かけの大きさとに基づいて、作業対象5および指標10が設けられた壁面の座標上での撮影部6の撮影範囲の大きさと角度と形状とを算出して、視野座標情報19として出力する。この視野座標情報19は、表示制御部12に入力される。図10に、視野座標情報19のイメージを図示する。実際には、図10のように、視野座標情報19は、壁面上に表示されないが、この視野座標情報19で決定される領域が「撮影部6の撮影範囲」であり、「作業者4の視野」であるともいうことができる。
表示制御部12は、視野座標情報19と、図15の作業対象座標テーブルから得られた作業対象5の座標とを比較して、作業者4が次に作業を行うべき作業対象5が視野座標情報19で決定される領域内に入っているか否かを判断する。表示制御部12は、図11に示すフローに従い、作業対象5が視野座標情報19内に入っているか否かに応じて、図12のように作業対象5を強調表示するための付加情報を表示するか、図13のように作業対象5の方向を作業者4に対して知らせるための付加情報を表示するかを、決定する。これにより、作業者4の作業を支援することができる。
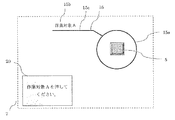
図12は、作業対象5が視野座標情報19の領域内に入っている場合の付加情報の一例を示す図である。図12では、作業対象5を指し示すための付加情報15が、表示制御部12により映像表示部7に表示されている。付加情報15は、作業対象5を円で囲むことで強調表示するための円形付加情報15aと、作業対象5の作業対象名を示す名称付加情報15bとを含んでいる。また、円形付加情報15aと名称付加情報15bとを結ぶ引出線付加情報15cをさらに付加情報15に含めるようにしてもよい。
図13は、作業対象5が視野座標情報19の領域内に入っていない場合の付加情報の一例を示す図である。図13では、視野座標情報19の領域内に作業対象5が入っていないため、表示制御部12は、作業対象5の方向を示すための誘導用付加情報として、付加情報16を表示する。付加情報16は、作業対象5の方向を示すための矢印付加情報16aと作業対象5の作業対象名を示す名称付加情報16bとを含んでいる。矢印付加情報16aは、作業対象5の位置に合わせて、表示位置や角度を変えることで、作業者4の視線を誘導する。
ここで、図11のフローについて説明する。
表示制御部12は、図11に示すように、ステップS11で、指標認識部11から入力された視野座標情報19と、図15の作業対象座標テーブルから得られた作業対象5の座標とを比較して、作業対象5が視野座標情報19で決定される領域内に入っているか否かを判定する。
作業対象5が視野座標情報19の領域内に入っていると判定した場合には、ステップS12に進む。一方、作業対象5が視野座標情報19の領域内に入っていないと判定した場合には、ステップS13に進む。
ステップS12では、作業対象5が視野座標情報19の領域内に入っているので、図12に示すように、作業対象5を強調表示するための付加情報15を表示する。
ステップS13では、作業対象5が視野座標情報19の領域内に入っていないので、図13に示すように、作業対象5の方向を作業者4に対して知らせるための誘導用の付加情報16を表示する。
ステップS13の処理が完了すると、ステップS11に戻る。ステップS11で、再度、作業対象5が視野座標情報19で決定される領域内に入っているか否かを判定する。これにより、作業対象5が視野座標情報19で決定される領域内に入っていれば、ステップS12に進み、そうでなければ、ステップS13に進む。
これにより、作業者4の視線が移動することで作業対象5が視野座標情報19の領域に入るまで、図11のフローは何度でも繰り返され、作業対象5が視野座標情報19の領域に入った時点で、誘導用の付加情報16の表示から、作業対象5を強調表示するための付加情報15の表示に切り替わる。作業者4は、付加情報15と付加情報20とを参照しながら、対応する作業対象5の作業を実施するので、作業内容を間違えたり、あるいは、誤って他の作業対象5を作業してしまうようなミスを防ぐことができる。
表示制御部12は、図11に示すように、ステップS11で、指標認識部11から入力された視野座標情報19と、図15の作業対象座標テーブルから得られた作業対象5の座標とを比較して、作業対象5が視野座標情報19で決定される領域内に入っているか否かを判定する。
作業対象5が視野座標情報19の領域内に入っていると判定した場合には、ステップS12に進む。一方、作業対象5が視野座標情報19の領域内に入っていないと判定した場合には、ステップS13に進む。
ステップS12では、作業対象5が視野座標情報19の領域内に入っているので、図12に示すように、作業対象5を強調表示するための付加情報15を表示する。
ステップS13では、作業対象5が視野座標情報19の領域内に入っていないので、図13に示すように、作業対象5の方向を作業者4に対して知らせるための誘導用の付加情報16を表示する。
ステップS13の処理が完了すると、ステップS11に戻る。ステップS11で、再度、作業対象5が視野座標情報19で決定される領域内に入っているか否かを判定する。これにより、作業対象5が視野座標情報19で決定される領域内に入っていれば、ステップS12に進み、そうでなければ、ステップS13に進む。
これにより、作業者4の視線が移動することで作業対象5が視野座標情報19の領域に入るまで、図11のフローは何度でも繰り返され、作業対象5が視野座標情報19の領域に入った時点で、誘導用の付加情報16の表示から、作業対象5を強調表示するための付加情報15の表示に切り替わる。作業者4は、付加情報15と付加情報20とを参照しながら、対応する作業対象5の作業を実施するので、作業内容を間違えたり、あるいは、誤って他の作業対象5を作業してしまうようなミスを防ぐことができる。
以上のように、本実施の形態に係る作業支援システムは、作業対象5が設置されている平面上に等間隔で配置される指標10と、指標10を含む映像を撮影する撮影部6と、作業対象5の作業者4に対して、作業を支援するための付加情報を表示する映像表示部7と、平面上の同一座標系で定義した作業対象5の座標と指標10の座標とを予め記憶する記憶装置を有する処理装置8とから構成されている。処理装置8は、撮影部6で撮影された映像に含まれる指標10を検出して、当該指標の座標を記憶装置から取得することで、撮影部6の撮影範囲を決定する指標認識部11と、作業対象5の座標を記憶装置から取得して、指標認識部11で決定された撮影部6の撮影範囲内に作業対象5が入っているか否かを判定するとともに、作業対象5が撮影範囲内に入っていると判定した場合に、作業対象5を強調表示する強調表示用の付加情報15を表示し、作業対象5が撮影範囲内に入っていないと判定した場合に、作業者4の視線を作業対象5に向かって誘導する誘導用の付加情報16を表示するように、映像表示部を制御する表示制御部12とを備えている。
上述した特許文献1に記載のARによる付加情報表示では、指標が撮影手段の視野内にないと付加情報を提示することができなかったが、本実施に係る作業支援システムにおいては、上記構成により、作業者4にとって作業対象5がいずれであるか明確でない場合にも、作業対象5の周囲に指標10を多数配置し、撮影部6が常に1個以上の指標10をとらえられるような構成とし、且つ、作業対象5と指標10とを同じ座標上で表現し、作業対象5が撮影部6の撮影範囲内に入っていない場合には、作業者4に対して視線誘導のための付加情報16を表示することで、作業者4が迷わず作業対象5に視線を移し、作業に必要な作業内容等の付加情報を得ることができる。
上述した特許文献1に記載のARによる付加情報表示では、指標が撮影手段の視野内にないと付加情報を提示することができなかったが、本実施に係る作業支援システムにおいては、上記構成により、作業者4にとって作業対象5がいずれであるか明確でない場合にも、作業対象5の周囲に指標10を多数配置し、撮影部6が常に1個以上の指標10をとらえられるような構成とし、且つ、作業対象5と指標10とを同じ座標上で表現し、作業対象5が撮影部6の撮影範囲内に入っていない場合には、作業者4に対して視線誘導のための付加情報16を表示することで、作業者4が迷わず作業対象5に視線を移し、作業に必要な作業内容等の付加情報を得ることができる。
なお、上記の説明においては、撮影部6から指標認識部11に映像が入力されるとして説明したが、その場合に限らず、一定周期ごとの静止画像でもよいこととする。
なお、上記の説明においては、作業支援システムが映像表示装置から構成されている場合を例に挙げたが、この発明の作業支援システムは、その場合に限定されるものではない。作業を支援するための付加情報の出力方法は、他の方法を用いてもよい。例えば、図13の付加情報を、音声メッセージにより「作業対象Aは右方向にあります。」と出力するようにしてもよい。あるいは、作業者4に対する付加情報15,16を、作業対象5が設置されている壁面に、例えば赤色光のような色の付いた光により直接表示するようにしてもよい。その場合には、作業者4が作業支援システムを装着する必要がなくなる。具体的には、図12に示した強調用の付加情報としては、例えば、スポットライトのように局所的で且つ色の付いた光により作業対象5だけを照明し、一方、図13の誘導用の付加情報としては、例えば、色の付いた光で構成した矢印を壁面上に表示するようにすればよい。
1 余白、2 黒枠、3 パターン、4 作業者、5 作業対象、6 撮影部、7 映像表示部、8 処理装置、9 スイッチ、10 指標、11 指標認識部、12 表示制御部、13 手順管理部、14 頭部、15,16,20 付加情報、17 視野幅、18 配置間隔。
Claims (6)
- 作業対象が設置されている平面上に等間隔で配置される指標と、
前記指標を含む映像を撮影する撮影部と、
前記作業対象の作業者に対して、作業を支援するための付加情報を表示する映像表示部と、
前記平面上の同一座標系で定義した前記作業対象の座標と前記指標の座標とを予め記憶する記憶部と、
前記撮影部で撮影された前記映像に含まれる前記指標を検出して、当該指標の座標を前記記憶部から取得することで、前記撮影部の撮影範囲を決定する指標認識部と、
前記作業対象の座標を前記記憶部から取得して、前記指標認識部で決定された前記撮影部の前記撮影範囲内に前記作業対象が入っているか否かを判定する判定部と、
前記判定部によって前記作業対象が前記撮影範囲内に入っていると判定された場合に、前記作業対象を強調表示する強調表示用の付加情報を表示し、前記判定部によって前記作業対象が前記撮影範囲内に入っていないと判定された場合に、前記作業者の視線を前記作業対象に向かって誘導する誘導用の付加情報を表示するように、前記映像表示部を制御する表示制御部と
を備えた作業支援システム。 - 前記映像表示部は、透過性の表示装置から構成されて、前記作業者の眼前に配置される 請求項1に記載の作業支援システム。
- 前記強調用の付加情報は、前記作業対象を円で囲むことで強調表示するための円形付加情報を含んでいる
請求項1または2に記載の作業支援システム。 - 前記誘導用の付加情報は、前記作業対象の方向を矢印で示すための矢印付加情報を含んでいる
請求項1から3までのいずれか1項に記載の作業支援システム。 - 各前記指標は、それぞれ、重複しない固有のパターンを有し、
前記記憶部は、前記指標の前記固有のパターンと前記指標の座標との対応関係が予め定められた指標配置座標テーブルを有している
請求項1から4までのいずれか1項に記載の作業支援システム。 - 前記作業対象は複数個設置され、当該複数個の作業対象は予め定められた作業手順に従って順次作業されるものであって、
前記記憶部は、各作業対象に付された前記作業手順の順序を示す手順番号ごとに、各作業の名称と各作業対象の作業説明情報とを予め記憶した作業手順テーブルを有し、
前記作業支援システムは、
前記作業手順の一手順が終了したタイミングで前記作業者によって外部から入力される信号に基づき、終了した当該一手順の次の手順の手順番号を前記表示制御部に出力する手順管理部
をさらに備え、
前記表示制御部は、前記手順管理部から前記手順番号が入力されたときに、前記作業手順テーブルから当該手順番号に対応する前記作業説明情報を取得し、当該作業説明情報を表示するように、前記映像表示部を制御する
請求項1から5までにいずれか1項に記載の作業支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015088925A JP2016208331A (ja) | 2015-04-24 | 2015-04-24 | 作業支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015088925A JP2016208331A (ja) | 2015-04-24 | 2015-04-24 | 作業支援システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016208331A true JP2016208331A (ja) | 2016-12-08 |
Family
ID=57487937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015088925A Pending JP2016208331A (ja) | 2015-04-24 | 2015-04-24 | 作業支援システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016208331A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107707627A (zh) * | 2017-09-06 | 2018-02-16 | 珠海格力电器股份有限公司 | 一种工程接线的引导方法及客户端 |
| JP2018106611A (ja) * | 2016-12-28 | 2018-07-05 | Kddi株式会社 | Ar情報表示装置及びプログラム |
| WO2019039219A1 (ja) | 2017-08-25 | 2019-02-28 | 株式会社イシダ | 作業支援システム |
| WO2019044346A1 (ja) | 2017-08-31 | 2019-03-07 | 株式会社イシダ | 作業支援システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008046687A (ja) * | 2006-08-10 | 2008-02-28 | Canon Inc | 撮影環境校正方法及び情報処理装置 |
| JP2012174243A (ja) * | 2011-02-24 | 2012-09-10 | Kyocera Corp | 携帯情報機器および仮想情報表示プログラム |
| JP2015048171A (ja) * | 2013-08-30 | 2015-03-16 | 学校法人立命館 | ピッキングシステム |
-
2015
- 2015-04-24 JP JP2015088925A patent/JP2016208331A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008046687A (ja) * | 2006-08-10 | 2008-02-28 | Canon Inc | 撮影環境校正方法及び情報処理装置 |
| JP2012174243A (ja) * | 2011-02-24 | 2012-09-10 | Kyocera Corp | 携帯情報機器および仮想情報表示プログラム |
| JP2015048171A (ja) * | 2013-08-30 | 2015-03-16 | 学校法人立命館 | ピッキングシステム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018106611A (ja) * | 2016-12-28 | 2018-07-05 | Kddi株式会社 | Ar情報表示装置及びプログラム |
| WO2019039219A1 (ja) | 2017-08-25 | 2019-02-28 | 株式会社イシダ | 作業支援システム |
| WO2019044346A1 (ja) | 2017-08-31 | 2019-03-07 | 株式会社イシダ | 作業支援システム |
| CN107707627A (zh) * | 2017-09-06 | 2018-02-16 | 珠海格力电器股份有限公司 | 一种工程接线的引导方法及客户端 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10642564B2 (en) | Display system, display device, information display method, and program | |
| CN106062862B (zh) | 用于沉浸式和交互式多媒体生成的系统和方法 | |
| JP5762892B2 (ja) | 情報表示システム、情報表示方法、及び情報表示用プログラム | |
| JP6149403B2 (ja) | 表示装置、および、表示装置の制御方法 | |
| WO2013179427A1 (ja) | 表示装置、ヘッドマウントディスプレイ、校正方法及び校正プログラム、並びに記録媒体 | |
| JP5295714B2 (ja) | 表示装置、画像処理方法、及びコンピュータプログラム | |
| JP6390799B2 (ja) | 入力装置、入力方法、及びプログラム | |
| JP2016208331A (ja) | 作業支援システム | |
| JP6344530B2 (ja) | 入力装置、入力方法、及びプログラム | |
| JP2018180090A (ja) | 作業教育システム | |
| JP2016036390A (ja) | 情報処理装置、焦点検出方法、および焦点検出プログラム | |
| JP2022106801A (ja) | 多層ビューイングシステムおよび方法 | |
| JP5857082B2 (ja) | 表示装置及び電子機器 | |
| JPH105178A (ja) | 視線入力装置 | |
| JP2018151742A (ja) | 情報表示システム | |
| JP2016126687A (ja) | ヘッドマウントディスプレイ、操作受付方法および操作受付プログラム | |
| JP6540426B2 (ja) | 表示システム、表示装置、情報表示方法、及び、プログラム | |
| JP5646532B2 (ja) | 操作入力装置、操作入力方法、及び、プログラム | |
| JP2017102221A (ja) | 画像表示装置 | |
| WO2010050301A1 (ja) | 映像表示システム | |
| JP2019012432A (ja) | 作業支援システム、装置、方法、及びコンピュータプログラム | |
| JP2012058353A (ja) | 画像表示装置、及びその制御方法 | |
| US11080942B2 (en) | Assistance method for assisting performance of a task on a product, comprising displaying a highlighting image highlighting a monitored part of the product | |
| JP2019066196A (ja) | 傾き測定装置及び傾き測定方法 | |
| US20220079484A1 (en) | Evaluation device, evaluation method, and medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20161220 |